数控机床的坐标轴及各轴确立
如何正确设置数控机床的坐标系
如何正确设置数控机床的坐标系数控机床是一种高精度的机械加工设备,广泛应用于各个行业的制造领域。
正确设置数控机床的坐标系对于保证加工的精度和准确性至关重要。
本文将介绍如何正确设置数控机床的坐标系,以保证加工质量和效率。
首先,正确设置数控机床的坐标系需要了解和确定工件的坐标轴方向和坐标系的原点。
一般来说,数控机床的坐标系是由工件材料的几何特征和加工工艺要求所确定的。
其中,X轴一般指沿着工件的长度方向,Y轴一般指沿着工件的宽度方向,Z轴一般指沿着工件的高度方向。
确定了坐标轴方向后,需要将工件的原点确定为数控机床坐标系的原点。
其次,正确设置数控机床的坐标系还需要进行坐标系的对刀操作。
对刀操作是指确定工件表面相对数控机床坐标系原点的位置。
常用的对刀方法有机械对刀和光电对刀两种方式。
机械对刀是通过零位块等工具进行对刀,并通过机床的代码进行调整。
而光电对刀则是通过光电对刀仪等设备进行对刀,并根据设备的反馈信息进行调整。
无论采用哪种对刀方式,都需要确保工件表面与数控机床的坐标系原点的位置准确重合。
另外,正确设置数控机床的坐标系还包括以下几个方面的内容:刀具的长度补偿、工件的换刀点位置和坐标系的偏移校正。
刀具长度补偿是指根据刀具的实际长度,对数控机床的坐标系进行修正,使得机床在进行加工时可以准确控制刀具的位置。
工件的换刀点位置是指在加工过程中,当需要更换刀具时的机床坐标系位置,需要根据工件的实际尺寸和加工要求在编程时进行设置。
坐标系的偏移校正是指在加工过程中,由于机床和刀具的误差导致加工结果与设计要求不一致时,进行坐标系的调整,以保证加工结果的准确性。
最后,正确设置数控机床的坐标系还需要注意在编程过程中的细节。
在进行加工程序编写时,需要明确工件的尺寸、加工位置和加工顺序,并在程序中正确设置数控机床的坐标系参数。
同时,在进行机床操作时,需要根据加工要求和工件特点选择合适的工艺参数,并进行实时的监测和调整。
总之,正确设置数控机床的坐标系对于保证加工的精度和准确性至关重要。
数控机床坐标轴方向的确定步骤及方法实例

台州亚古机床设备有限公司
数控机床坐标轴方向的确定步骤及方法实例
1.坐标轴方向的确定方法步骤:
(1)Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z坐标的正向为刀具离开工件的方向。
如果机床上有几个主轴,则选一个垂直于工件装夹平面的主轴方向为Z坐标方向;如果主轴能够摆动,则选垂直于工件装夹平面的方
向为Z坐标方向;如果机床无主轴,则选垂直于工件装夹平面的方向为Z坐标方向。
(2)X坐标
X坐标平行于工件的装夹平面,一般在水平面内。
确定X轴的方向时,要考虑两种情况:
1)如果工件做旋转运动,则刀具离开工件的方向为X坐标的正方向。
2)如果刀具做旋转运动,则分为两种情况:Z坐标水平时,观察者沿刀具主轴向工件看时,+X运动方向指向右方;Z坐标垂直时,
观察者面对刀具主轴向立柱看时,+X运动方向指向右方。
(3)Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向。
图1所示为数控车床的Y坐标。
2.举例
(1)Z坐标:平行于主轴,刀具离开工件的方向为正。
(2)X坐标:Z坐标垂直,且刀具旋转,所以面对刀具主轴向立柱方向看,向右为正。
(3)Y坐标:在Z、X坐标确定后,用右手直角坐标系来确定。
数控机床的坐标轴及各轴确立

+Z
笛卡尔直角坐标系统
右手直角坐标系(笛卡尔坐标系) 围绕X、Y、Z轴旋转的旋转进给坐标轴A、B、C则按 右手螺旋定则判定。
大拇指指向+ X、+Y、+Z坐 标轴的方向,则其余四指的 旋转方向即为+A、+B、+C
的方向。
+Y
+B +Y
+C +Z
+X
+X
+X、+Y或+Z
+A +A、+B 或 +C
+Z
② Z轴为铅垂方向 ( 立式主轴)
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+X
立式数控机床+x
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床)
② Z轴为铅垂方向 ( 立式主轴)
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+Z +X/
立式数控机床+x
X坐标轴
+Z +W
+A +C/
+X/
+Y
立式5轴数控铣床的坐标系
多轴数控机床坐标系示例
(a)卧式镗铣床
(b)六轴加工中心
卧式数控车床
X坐标轴
对于刀具旋转的机床 (如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
卧式镗床
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
+Z +X/
CNC机床坐标系的确定及工件坐标系
CNC机床坐标系的规定及工件坐标系1进给运动与坐标系数控加工必须准确描述进给运动。
加工过程中,刀具相对工件运动轨迹和位置决定了零件加工的尺寸、形状。
数控加工就是让数控机床按照数控程序所描述的刀具相对工件运动的轨迹进行切削运动,从而加工出零件的表面形状。
把刀具相对工件的进给运动轨迹简称刀轨,数控机床必须确切知道刀轨,编程人员必须准确描述表达刀轨。
刀轨一般由直线段或圆弧段组成,线段起点、终点、交点、切点的位置是表达刀轨的最主要信息。
数学中,点位可以在坐标系里定义为坐标值。
如果在数控机床上规定建立一个笛卡儿直角坐标系的数控机床坐标系,就可以方便地在机床或在工件的图样上描述刀轨。
CNC编程中,使用数字来“翻译”图纸,将图纸的尺寸变成刀轨。
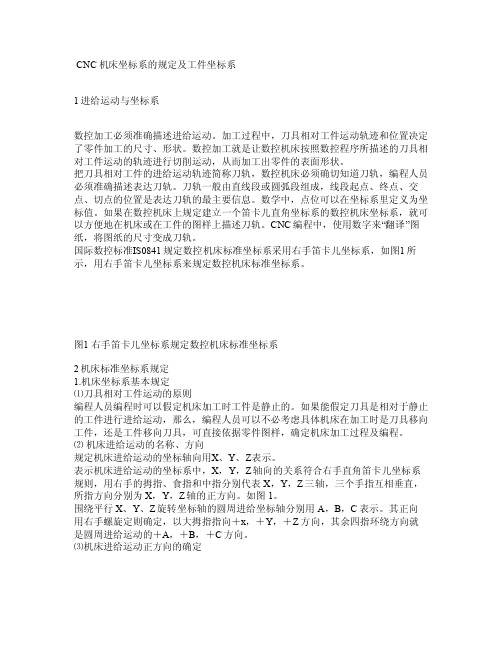
国际数控标准I S0841规定数控机床标准坐标系采用右手笛卡儿坐标系,如图1所示,用右手笛卡儿坐标系来规定数控机床标准坐标系。
图1右手笛卡儿坐标系规定数控机床标准坐标系2机床标准坐标系规定1.机床坐标系基本规定⑴刀具相对工件运动的原则编程人员编程时可以假定机床加工时工件是静止的。
如果能假定刀具是相对于静止的工件进行进给运动,那么,编程人员可以不必考虑具体机床在加工时是刀具移向工件,还是工件移向刀具,可直接依据零件图样,确定机床加工过程及编程。
⑵机床进给运动的名称、方向规定机床进给运动的坐标轴向用X、Y、Z表示。
表示机床进给运动的坐标系中,X,Y,Z轴向的关系符合右手直角笛卡儿坐标系规则,用右手的拇指、食指和中指分别代表X,Y,Z三轴,三个手指互相垂直,所指方向分别为X,Y,Z轴的正方向。
如图1。
围绕平行X、Y、Z旋转坐标轴的圆周进给坐标轴分别用A,B,C表示。
数控机床坐标轴的确定方法

数控机床坐标轴的确定方法
1.坐标系确定。
首先需要确定机床的坐标系,即确定X、Y、Z三个坐标轴的正方向及相对位置关系。
常用的坐标系有直角坐标系、圆柱坐标系和球面坐标系等。
2. 坐标原点确定。
确定坐标原点是确定机床加工工件时的参照点,也是坐标轴的起点。
通常选取工件的某一点作为坐标原点,在加工时以此点为基准进行坐标位置的确定。
3. 坐标轴方向确定。
数控机床的坐标轴方向分为两种:绝对编码和增量编码。
绝对编码是指每个点都有一个固定的坐标值,而增量编码是指每个点的坐标值都是相对于上一个点的位置移动而来。
在确定坐标轴方向时,需要考虑机床的运动方式和加工要求,选择适当的编码方式。
以上是数控机床坐标轴的确定方法,它的正确确定对于机床的加工精度和加工效率有着重要的影响。
- 1 -。
数控车床坐标系

一、基本坐标系机床坐标轴:为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命名制定了统一的标准,规定直线进给坐标轴用X,Y,Z表示,称基本坐标轴。
X,Y,Z坐标轴的相互关系用右手笛卡尔法则确定,如下图所示图中大拇指指向X轴的正方向,食指指向Y轴的正方向,中指指向Z轴的正方向。
小结:机床坐标系坐标轴应遵循的原则运动方向的确定刀具相对与静止工件而运动的原则,且刀具远离工件的方向为坐标轴正方向。
则坐标系用加“’”的字母表示,按相对运动关系,工件运动的正方向恰好与刀具运动的正方向相反,则有:•+X=-X′ +Y=-Y′ +Z=-Z′•+A=-A′ +B=-B′ +C=-C′确定机床坐标轴的正方向坐标轴方向的确定1、Z轴坐标的运动一般取产生切削力的主轴轴线方向为Z轴方向2、X轴坐标的运动X轴一般位于平行于工件装夹面的水平面内,且垂直于Z轴,车床上是对应刀架的径向移动方向。
3、Y轴坐标的运动Y轴(车床上通常设为虚轴)于X轴和Z轴一起构成遵循右手笛卡尔坐标系。
确定机床坐标系各坐标轴的具体方位的方法二、坐标系的类型1、机床坐标系以机床原点为坐标原点建立起来的直角坐标系称为机床坐标系。
机床坐标系是机床固有的,它是制造和调整机床的基础,也是设置工件坐标系的基础。
其坐标轴及方向按标准规定,其坐标原点的位置则由各机床生产厂设定,一般情况下,不允许用户随意变动。
刀具运动的参照坐标系机床坐标系2、工件坐标系工件坐标系也称编程坐标系,专供编程时使用,选择工件上的某一已知点为原点,建立一个新的坐标系,称为工件坐标系。
,如下图所示。
工件坐标系一旦建立便一直有效,直到被新的坐标系所代替为止。
工件坐标系编制程序所用的参照坐标系机床坐标系和工件坐标系的对比工件坐标系机床坐标系三、各个基本点及关系画龙点睛1、机床原点机床坐标系的原点又称为机床原点或机床零点,这是一个固有的点,通常有机床制造厂确定。
它是数控车床进行加工运动的基准参考点。
数控机床坐标轴的规定

数控机床坐标轴的规定在确定机床坐标轴时,一般先确定Z轴,然后确定X轴和Y轴,最后确定其它轴。
JB3051-82标准中规定,机床运动的正方向,是指增大工件和刀具之间距离的方向。
(1)Z轴Z轴的方向是由传递切削力的主轴确定的,与主轴轴线平行的坐标轴即为Z轴。
如图所示。
如果机床没有主轴,则Z轴垂直于工件装卡面。
同时规定刀具远离工件的方向作为Z轴的正方向。
例如在钻镗加工中,钻入和镗入工件的方向为Z坐标的负方向,而退出为正方向。
(2)X轴X轴是水平的,平行于工件的装卡面,且垂直于Z轴。
这是在刀具或工件定位平面内运动的主要坐标。
对于工件旋转的机床(如车床、磨床等),X坐标的方向是在工件的径向上,且平行于横滑座。
刀具离开工件旋转中心的方向为X轴正方向。
对于刀具旋转的机床(铣床、镗床、钻床等),如Z轴是垂直的,当从刀具主轴向立柱看时,X运动的正方向指向右。
如果Z轴是水平的,当从主轴向工件方向看时,主轴的正方向指向右。
(3)Y轴Y坐标轴垂直于X、Z坐标轴。
y运动的正方向根据X和Z坐标的正方向,按照右手直角笛卡儿坐标系来判断。
(4)旋转运动围绕坐标轴X、Y、Z旋转的运动,分别用A、B、C表示。
它们的正方向用右手螺旋法则判定。
(5)附加轴如果除X、Y、Z坐标以外,还有平行于它们的坐标,可分别指定为P、Q和R。
(6)工件运动时的相反方向对于工件运动而不是刀具运动的机床,必须将前述为刀具运动所作的规定,作相反的安排。
用带“’”的字母,如+Y’,表示工件相对于刀具正向运动指令。
而不带“’”的字母,如+Y,则表示刀具相对于工件负向运动指令。
二者表示的运动方向正好相反。
对于编程人员只考虑不带“’”的运动方向。
对于机床制造者,则需要考虑带“’”的运动方向。
数控铣床程序编制--刀具补偿1、刀具半径补偿:铣削加工的刀具半径补偿分为刀具半径左补偿和刀具半径右补偿。
1)刀具半径左补偿G41指令和刀具半径右补偿G42指令格式:说明:G41:左刀补(在刀具前进方向左侧补偿);G42:右刀补(在刀具前进方向右侧补偿);X、Y:刀补建立或取消的终点;D:刀具半径补偿寄存器地址字(D00~D99)2)取消刀具半径补偿G40指令说明:G40:取消刀具半径补偿。
数控机床坐标轴的确定方法
数控机床坐标轴的确定方法
数控机床坐标轴的确定方法是指在数控机床加工过程中,确定各个坐标轴的绝对位置,以保证零件加工的精度和质量。
数控机床坐标轴一般分为三个方向,即X、Y、Z轴,每个轴的方向和位置都是通过编程设定来确定的。
确定数控机床坐标轴的方法主要有以下几种:
1. 机械刀具测量法:通过机械刀具在加工过程中的移动距离和位置,来确定数控机床的坐标轴。
2. 数字式测量法:使用传感器和测量仪器对数控机床进行测量,以确定坐标轴的位置和方向。
3. 参考工件法:将一个已知位置和方向的工件放置在数控机床上,通过对工件的加工过程进行测量和分析,确定数控机床各个坐标轴的位置和方向。
4. 数学模型法:通过建立数学模型,对数控机床进行分析和计算,以确定各个坐标轴的位置和方向。
以上这些方法都可以用来确定数控机床坐标轴的位置和方向,但在实际应用中,一般会结合多种方法来进行精确的测量和校准。
只有确保数控机床各个坐标轴的准确性和稳定性,才能保证零件加工的精度和质量,提高生产效率和经济效益。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+X
立式数控机床+x
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床)
② Z轴为铅垂方向 ( 立式主轴)
a.对于单立柱机床 ,从刀具向立柱看时 X 轴的正方向指向右 边。
+Z +X/
立式数控机床+x
X坐标轴
数控机床坐标轴及各轴确立
情境二、数控机床的坐标轴和坐标系
1、 数控机床坐标轴和坐标系概述
基本坐标系
数控机床采用在坐标系中描述刀具与工件之间的相对运动轨迹, 这个坐标系是依据空间右手直角笛卡尔坐标系的原则建立的, 称为基本坐标系。
基本坐标轴
基本坐标系中三个坐标轴,称为基本坐标轴。 分别用X、Y、Z表示。
龙门式轮廓铣床
Y坐标轴
利用已确定的X、Z坐标的正方向,用右手定则或右手螺旋法 则,确定Y坐标的正方向。
✓右手定则:大姆指指向+X,中指指向+Z,则+Y方向为 食指指向 ✓右手螺旋法则:在X Z平面,从Z至X,姆指所指的方向 为+y。
立、卧式数控铣床
+Z
+Y
+Z
+X
+X/
+Y
龙门数控铣床
+Z +Y +X/
Z坐标轴
对于铣床、镗床、钻
+Z
床等是带动刀具旋转
的轴;
铣床+z轴
Z坐标轴
车床、磨床等是 带动工件旋转的轴,其 方向是平行于主轴轴 线,远离工件方向为 正方向。
车床Z轴方向的确定
X坐标轴
定义: X轴为水平方向且垂直于Z轴并平行于工件的装夹面。 正方向:取刀具远离工件的方向为正方向
X坐标轴
对于工件旋转的机床 (如车床、磨床等), X坐标是工件的径向 且平行于横向拖板, 刀具远离回转中心 是正向。
+Z
笛卡尔直角坐标系统
右手直角坐标系(笛卡尔坐标系) 围绕X、Y、Z轴旋转的旋转进给坐标轴A、B、C则按 右手螺旋定则判定。
大拇指指向+ X、+Y、+Z坐 标轴的方向,则其余四指的 旋转方向即为+A、+B、+C
的方向。
+Y
+B +Y
+C +Z
+X
+X
+X、+Y或+Z
+A +A、+B 或 +C
+Z
卧式数控车床
X坐标轴
对于刀具旋转的机床 (如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
卧式镗床
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床) ① 当Z轴水平时,沿刀具 主轴向工件看,X轴的正方 向指向右边。
+Z +X/
X坐标轴
对于刀具旋转的机床
(如铣、钻、镗床)
+X´、+Y ´ 、+Z ´表示 工件的正移动方向。
先确定Z轴,再确定X轴和Y轴!
2、数控机床坐标轴的规定
Z坐标轴
定义:一般取传递切削动力的主轴轴线方向为Z轴 正方向:取刀具远离工件的方向为正方向 ✓当机床有几个主轴时,选一个垂直工件装夹面的主轴为Z轴 ✓当机床没有主轴时,选与工件装夹相垂直的直线为Z轴
+Z
+Y +C/
+X/
+Z
+A +C/
+X/
+Y
立式5轴数控铣床的坐标系
附加坐标轴
如果在基本的直角坐标轴X、Y、Z之外,还有其他轴线平行于X、 Y、Z,则附加的直角坐标系指定为U、V、W和P、Q、R。
主坐标或第一坐标系:X、Y、Z 第二组附加坐标:U、V、W 第三组附加坐标:P、Q、R 旋转坐标:D、E
+Z
+X/
+Y
立式5轴数控铣床的坐标系
Z X
立式车床的坐标系
卧式铣床的坐标系
Y
Z
X
A、B、C旋转坐标轴
绕X.Y.Z轴转动的圆进给坐标轴分别用A.B.C表示,坐标轴相互关 系由右手螺旋法则而定
+Y
+Y
+B
¡ +Z ¯
¡
+X ¯
+X
+X +Y+Z
+C
+A
+Z
¡ +Y ¯
+A +B
+C
+X
+Z
A、B、C旋转坐标轴
对于刀具旋转的机床
(如铣、钻、镗床)
② Z轴为铅垂方向 ( 立式主轴)
b.对于双立柱机床(如 龙门机床),当站在操作台 一侧从主轴向左侧立柱看时 ,X轴的正方向指向右边。
+Z +X/
龙门式机床
X坐标轴
对于刀具旋转的机床 (如铣、钻、镗床)
② Z轴为铅垂方向 ( 立式主轴) b.对于双立柱机床(如 龙门机床),当站在操作台 一侧从主轴向左侧立柱看时 ,X轴的正方向指向右边。
笛卡尔直角坐标系统
刀具运动坐标与工件运动坐标
编程时 采用
刀具与 工件间 的相对 运动方 式
刀具相对于工件运动 字母不带“ ′”的坐标表示工件固 定、刀具运动的坐标
+X = −X’ +Y = −Y’ +Z = −Z’ +A = −A’
+B = −B’ +C=−C’
工件相对于刀具运动 字母带“ ′”的坐标表示工件运动、 刀具固定的坐标
右手直角坐标系(笛卡尔坐标系)
X、Y、Z直线进给坐标系按右手定则规定
伸出右手的拇指、食指和中指,并 互成90度,拇指代表X坐标轴,食 指代表Y坐标轴,中指代表Z坐标 轴,拇指、食指和中指的指向分别 代表X、Y、Z坐标轴的正方向。
+Y
+B +Y
+C +Z
+X
+X
+X、+Y或+Z
+A +A、+B 或 +C
+Z +W+Aຫໍສະໝຸດ +C/+X/
+Y
立式5轴数控铣床的坐标系
多轴数控机床坐标系示例
(a)卧式镗铣床
(b)六轴加工中心
知识回顾 Knowledge Review
祝您成功!