基本尺寸的确定
尺寸公差的术语和定义
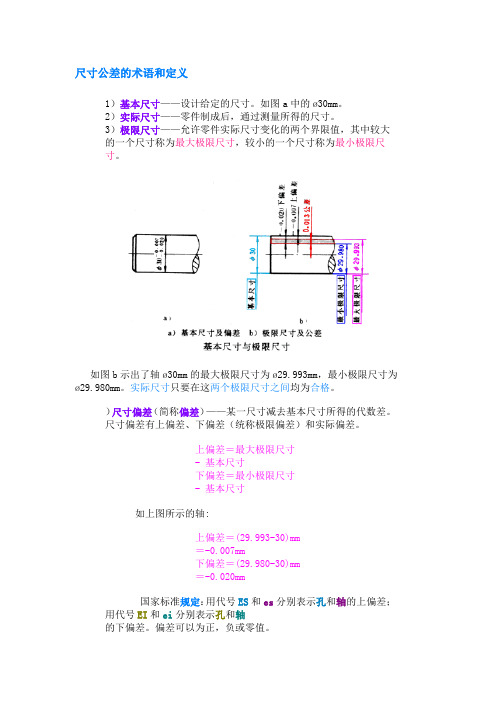
尺寸公差的术语和定义1)基本尺寸——设计给定的尺寸。
如图a中的ø30mm。
2)实际尺寸——零件制成后,通过测量所得的尺寸。
3)极限尺寸——允许零件实际尺寸变化的两个界限值,其中较大的一个尺寸称为最大极限尺寸,较小的一个尺寸称为最小极限尺寸。
如图b示出了轴ø30mm的最大极限尺寸为ø29.993mm,最小极限尺寸为ø29.980mm。
实际尺寸只要在这两个极限尺寸之间均为合格。
)尺寸偏差(简称偏差)——某一尺寸减去基本尺寸所得的代数差。
尺寸偏差有上偏差、下偏差(统称极限偏差)和实际偏差。
上偏差=最大极限尺寸- 基本尺寸下偏差=最小极限尺寸- 基本尺寸如上图所示的轴:上偏差=(29.993-30)mm=-0.007mm下偏差=(29.980-30)mm=-0.020mm国家标准规定:用代号ES和es分别表示孔和轴的上偏差;用代号EI和ei分别表示孔和轴的下偏差。
偏差可以为正,负或零值。
实际尺寸减去基本尺寸的代数差称为实际偏差。
零件尺寸的实际偏差在上、下偏差之间均为合格。
5)尺寸公差(简称公差)——允许尺寸变动的量。
即:公差=最大极限尺寸-最小极限尺寸或:公差=上偏差-下偏差如上图所示的轴公差=(29.993-29.980) mm=0.013mm或:公差=[-0.007-(-0.020)] mm=0.013mm由于最大极限尺寸总是大于最小极限尺寸,所以公差总是正值,且不能为零。
在零件图上,凡有公差要求的尺寸,通常不是标注两个极限尺寸,而是标注出基本尺寸和上、下偏差,见上图a。
6)尺寸公差带(简称公差带)——公差带是表示公差大小和相对于零线位置的一个区域。
上图a表示了一对互相结合的孔与轴的基本尺寸、极限尺寸、偏差、公差的相互关系。
为简化起见,一般只画出孔和轴的上、下偏差围成的方框简图,称为公差带图,见上图b。
在公差带图中,零线是表示基本尺寸的一条直线。
当零线画成水平线时,正偏差位于零线的上方,负偏差位于零线的下方,偏差值的单位为微米。
凸轮机构基本尺寸
注意:对于平底推杆 凸轮机构,也会产生失 真现象,见图。 增大 r0可避免
平底推杆凸轮机构,当平底推杆的运动规律使位移变化 太快时产生失真现象。图
增大 r0可避免
凸轮机构基本的确定要考虑因素较多:受力、效率及自 锁、运动失真、结构等,要综合考虑。可进行结构优化。
tgα = CP / (( r02 - e2 )1/ 2 + s) = (ds / dδ – e) / (( r02 - e2 )1/ 2 + s)
结论: ① s = F( δ ) 一定时,某一时刻 v 一定:
r0↓ → α↑
② 不同时刻 δ , α 不同,有一个αman 。
∴据 αman = [α] ---- 极限情况 确定 r0min 。
§7-4 凸轮机构基本尺寸的确定
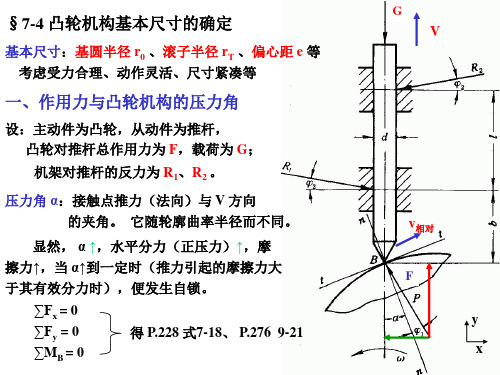
基本尺寸:基圆半径 r0 、滚子半径 rT 、偏心距 e 等 考虑受力合理、动作灵活、尺寸紧凑等
Hale Waihona Puke 一、作用力与凸轮机构的压力角
设:主动件为凸轮,从动件为推杆, 凸轮对推杆总作用力为 F,载荷为 G; 机架对推杆的反力为 R1、R2 。
压力角 α:接触点推力(法向)与 V 方向 的夹角。 它随轮廓曲率半径而不同。
显然, α ↑,水平分力(正压力)↑,摩 擦力↑,当 α↑到一定时(推力引起的摩擦力大 于其有效分力时),便发生自锁。
∑Fx = 0 ∑Fy = 0 ∑MB = 0
得 P.228 式7-18、 P.276 9-21
G
V
v相对
F
y x
G = F [ cos (α+ φ1 ) – (1 +2b / l )sin (α+ φ1 ) tgφ2 ]
公差计算公式
公差计算公式线性公差是指在产品尺寸上允许的正负偏差范围。
线性公差主要包括两个方面:基本尺寸和限制尺寸。
基本尺寸是指在设计图中标注的理论尺寸,是产品功能和使用要求的基础。
例如,设计图中标注的孔的直径为20mm,这个20mm就是基本尺寸。
限制尺寸是指在基本尺寸的基础上,根据制造过程的特点和要求,确定的允许最大和最小尺寸的范围。
限制尺寸通常用上下公差限表示,在设计图中用加减符号表示。
例如,上限为20.02mm,下限为19.98mm,这个就是限制尺寸。
线性公差的计算公式如下:公差=上限-下限公差范围=(上限-下限)/2例如,若基本尺寸为20mm,上限为20.02mm,下限为19.98mm,那么公差=(20.02-19.98)=0.04mm,公差范围=(20.02-19.98)/2=0.02mm。
公差范围也可以理解为公差的一半,它表示了在制造过程中允许的最大正负偏差范围。
以前述例子为例,公差范围为0.02mm,就是说在制造过程中允许的最大正负偏差范围为0.02mm,也就是孔的直径可以在19.98mm至20.02mm之间。
除了基本尺寸和限制尺寸,线性公差还有一个重要的概念是配合公差。
配合公差是指两个零件或两个零件中的一些特定尺寸之间的公差,用来确保零件的装配和运动要求。
配合公差可以表示为基轴公差和基孔公差,其中基轴公差是指插入孔中的轴的公差,基孔公差是指插入轴的孔的公差。
总之,公差计算公式是制造过程中必不可少的工具,它能够帮助工程师和技术人员确定产品尺寸的误差范围,确保产品的质量和可靠性。
除了线性公差的计算公式外,还有许多其他的公差计算公式,例如角度公差和位置公差等,这些公差计算公式的具体内容可以根据具体的设计要求和工艺要求进行学习和应用。
连杆的基本尺寸设计标准
连杆的基本尺寸设计标准连杆是一种常见的机械零件,用于将旋转运动转换为往复运动。
连杆的设计尺寸是保证其运动可靠性和耐久性的重要因素。
以下是连杆设计的基本尺寸标准。
1. 连杆长度:连杆的长度是根据具体应用情况和设计要求而定的。
一般来说,连杆的长度应该比其宽度小2-4倍。
这样可以确保连杆在运动过程中的强度和刚度。
2. 连杆宽度:连杆的宽度也是根据具体应用情况而定的。
一般来说,连杆的宽度应该比其直径大1.5-2倍。
这样可以在不牺牲强度和刚度的前提下增加杆件的接触面积,提高传递力的效率。
3. 连杆直径:连杆的直径是根据承载力和转动速度等因素来确定的。
一般来说,连杆的直径应该满足以下公式:d = K * P * (L / R)^0.5,其中,d为连杆的直径,K为系数(一般为1-2之间),P为所受力的最大值,L为连杆的长度,R为连杆的半径。
4. 连杆孔径:连杆的孔径是为了安装与之相连接的其他零部件而设计的。
一般来说,连杆的孔径应比连接零部件的直径大2-4倍,以确保连接的稳定性和可靠性。
5. 连杆轴心距离:连杆轴心距离是指连杆两侧连接点的距离。
连杆的轴心距离应根据具体应用情况来确定,以保证连杆的运动稳定和工作效率。
6. 连杆圆角半径:连杆在设计过程中需要考虑到圆角半径,以减少应力集中和裂纹的发生。
一般来说,连杆的圆角半径应为其厚度的1/3-1/2。
7. 连杆表面光洁度:连杆的表面光洁度也需要考虑,以减少摩擦和磨损。
连杆的表面光洁度应符合相应的机械标准,一般来说,表面粗糙度应为Ra0.8-1.6。
综上所述,连杆的基本尺寸设计标准包括长度、宽度、直径、孔径、轴心距离、圆角半径和表面光洁度等。
这些尺寸的确定应根据具体的应用需求和设计要求,以确保连杆的运动可靠性和耐久性。
基本尺寸和极限尺寸

基本尺寸与极限尺寸在工程设计与制造领域,尺寸的精准控制是至关重要的。
基本尺寸与极限尺寸是两个核心概念,它们在确保产品质量、性能以及互换性方面起着关键作用。
本文将详细探讨这两个尺寸的含义、重要性以及它们在实际应用中的相互影响。
一、基本尺寸基本尺寸是设计过程中确定的一个理论值,它是零件或产品设计的基准。
在机械制图中,基本尺寸通常标注在图纸上,作为制造和检验的依据。
基本尺寸的确定需要考虑产品的功能需求、结构特点以及制造工艺等因素。
在实际制造过程中,由于加工误差和测量误差的存在,零件的实际尺寸往往会偏离基本尺寸。
因此,在设计阶段就需要对这些误差进行合理预测和控制。
二、极限尺寸为了容纳制造误差并确保零件的互换性,引入了极限尺寸的概念。
极限尺寸是指允许零件尺寸变化的最大和最小值。
在机械制图中,极限尺寸通常通过标注上下偏差或公差带来表示。
公差带是一个以基本尺寸为中心,上下偏差为界限的区域。
只要零件的实际尺寸落在这个区域内,就可以认为它是合格的。
极限尺寸的确定需要考虑多种因素,包括制造工艺、材料性能、装配要求以及使用条件等。
合理的极限尺寸设置可以确保零件在制造和使用过程中具有足够的精度和互换性,从而提高产品质量和降低生产成本。
三、基本尺寸与极限尺寸的关系基本尺寸和极限尺寸是相互关联、相互制约的。
基本尺寸是设计的基准,而极限尺寸则是确保制造精度和互换性的手段。
在设计阶段,基本尺寸的确定需要充分考虑制造工艺和测量技术的能力,以确保极限尺寸的设置具有可行性和经济性。
同时,极限尺寸的设置也需要根据产品的功能需求和结构特点进行合理调整,以满足设计要求和使用要求。
四、实际应用中的考虑在实际应用中,基本尺寸和极限尺寸的选择和控制对于产品质量和性能具有重要影响。
以下是一些关键考虑因素:1. 制造工艺:不同的制造工艺具有不同的加工精度和误差范围。
因此,在选择基本尺寸和设置极限尺寸时,需要充分考虑制造工艺的特点和能力,以确保制造的可行性和经济性。
剪力墙布置及尺寸确定的基本原则
剪力墙布置及尺寸确定的基本原则剪力墙是建筑结构中常用的抗震构件,其布置及尺寸的确定对于整体结构的抗震安全至关重要。
下面是剪力墙布置及尺寸确定的基本原则。
1.布置原则:剪力墙应均匀布置在结构中,并尽量避免出现“冷墙”或“热墙”。
所谓“冷墙”是指剪力墙布置不均匀,集中分布在一部分区域,而其他区域剪力墙较少或甚至没有的情况。
这种不均匀布置会导致整体结构刚度不均,容易发生局部变形或破坏。
相反,“热墙”是指剪力墙集中布置在一部分区域,墙体密集、连续,而其他区域剪力墙较少,墙体间距大的情况。
热墙会在地震作用下出现过度集聚位移,造成部分结构位移超过允许值,容易导致结构破坏,因此也应尽量避免。
2.尺寸确定原则:剪力墙的尺寸应根据结构的荷载、约束条件和抗震需求进行合理确定。
主要考虑以下几个方面:-荷载:剪力墙承受着垂直荷载和水平荷载,所以需要根据结构设计的荷载计算结果来确定剪力墙的尺寸。
通常情况下,剪力墙的高度比例在整个结构的高度上不宜过高,建议在整个结构高度范围内分布。
-约束条件:剪力墙需要与其他结构构件(如梁、柱)等进行连接,因此在尺寸确定时需要考虑与其他构件的衔接情况,确保剪力墙能够有效承受荷载并传递给其他构件,提高整体结构的稳定性。
-抗震需求:剪力墙作为抗震构件,其尺寸的确定应符合地震作用下结构的抗震要求。
根据地震烈度、土层状况等因素,需要进行结构的抗震计算和分析,确定剪力墙的强度和刚度,进而确定其尺寸。
另外,还需要考虑实际施工条件、经济性、施工成本等因素。
根据具体项目的情况,可通过结构设计师和抗震专家的合作,进行详细计算和分析,从而确定合理的剪力墙布置及尺寸。
同时,还需遵循相关的建筑法规和抗震规范,确保结构的安全可靠。
总之,剪力墙布置及尺寸的确定是一个综合考虑多个因素的过程,需要考虑荷载、约束条件、抗震需求以及实际施工条件等因素,从而达到结构的稳定和安全。
在实际设计中,需要结合具体项目的情况进行综合分析,确保剪力墙的布置和尺寸满足相关的要求。
确定尺寸位置的几何要素
确定尺寸位置的几何要素
确定尺寸位置的几何要素包括以下几个方面:
1. 基准:基准是确定尺寸位置的基础,它可以是一个点、一条线或一个平面。
在设计和制造过程中,基准通常被用作参考,以确保零件的尺寸和位置的准确性。
2. 尺寸标注:尺寸标注是确定零件尺寸和位置的具体方法。
尺寸标注通常包括线性尺寸、角度尺寸、半径尺寸和直径尺寸等。
在标注尺寸时,需要考虑基准的选择、尺寸的精度和公差等因素。
3. 几何公差:几何公差是指零件的形状、方向、位置和跳动等方面的公差。
几何公差可以帮助确保零件的尺寸和位置的准确性,同时还可以提高零件的装配精度和使用性能。
4. 设计要求:在设计零件时,需要考虑零件的功能、使用环境和制造工艺等因素。
这些因素会影响零件的尺寸和位置的确定,因此在设计过程中需要综合考虑这些因素。
5. 制造工艺:制造工艺也会影响零件的尺寸和位置的确定。
不同的制造工艺可能会导致零件的尺寸和位置的变化,因此在制造过程中需要控制制造工艺,以确保零件的尺寸和位置的准确性。
总之,确定尺寸位置的几何要素包括基准、尺寸标注、几何公差、设计要求和制造工艺等方面。
在设计和制造过程中,需要综合考虑这些因素,以确保零件的尺寸和位置的准确性。
尺寸公差基本概念解读
公差 0.046
0.025 0.052
55.000
44.975 25.026
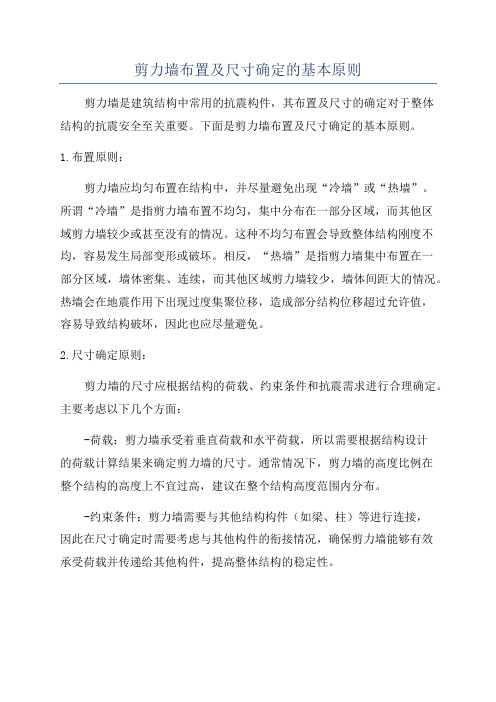
尺寸公差带图
由于Biblioteka 差与偏差的数值相差较大,不便用同 一比例表示, 故采用公差带图。 零线:表示基本尺寸的一条直线,以其为基 准确定偏差和公差,零线以上为正,以下为 负。 尺寸公差带:由代表上、下偏差的两条直线 + 所限定的一个区域。公差带有两个基本参数, 0 即公差带大小与位置。大小由标准公差确定, 位置由基本偏差确定。 标准公差:标准中表列的,用确定公差带大 小的任一公差。 基本偏差:标准中表列的,用以确定公差带 相对于零线位置的上偏差或下偏差。一般为 靠近零线的那个极限偏差。
标准公差系列
根据公差等级不同,国标规定标准公差分为20 个等级,即IT01、IT0、IT1、IT2、…、IT18。 从IT01到IT18,等级依次降低,而相应的标准 公差值依次增大。 基本尺寸分段:为减少标准公差的数目,简化 公差表格以利生产,国标对基本尺寸进行了分 段,主段落常用尺寸13段,大尺寸8段,见表24。在标准公差和基本偏差的计算公式中,基本 尺寸一律以所属尺寸段的几何平均值来计算。 按几何平均值计算出的公差值经尾数化整,即 得出标准公差值。见表2-1。
标准公差计算举例
基本尺寸为20mm,求IT6、IT7的公差值。 解:基本尺寸20mm,属于18~30mm, 则D= 18 30 =23.24mm 公差单位i=0.45 3 D+0.001D=1.31μm 查表2-2 IT6=10i IT7=16i 即IT6=10 ×1.31μm=13.1μm≈13 μm IT7=16 ×1.31μm=20.96 μm ≈21 μm
基础底面尺寸的确定
此处,10hw为水的浮力
基础底面的最大压力与最小压力 基底压力分布图
例十三 偏心压力作用下的基底压力(三)
条件:已知矩形基础的尺寸为l=4m,b=6m,承受 的轴向荷载(包括基础自重)F=4800KN,弯矩 M=5760KN·m,如图所示 要求:求基础底面接触压力
答案:
偏心距: 基础底面接触压力:
其中:
矩形面积中心荷载
F
B
x
L
y
实用简化计算
矩形面积偏心荷载
F
p(x,y)= F+G + Mx y + Myx
A
Ix
Iy
B
Mx (F G)ey;
M y (F G) ex
x
ey
L
ex
y
p= (F+G) Apmax =
F+G A
1+
6e B
当ey
pmax
min
0, ex e
(
F
G) A
700
3.23m2
240 20*1.15
3. 考虑偏心影响,将底板增大20%
A 1.2Ao 1.2*3.23 3.88m2
4. 初步确定底板尺寸
Fk 700kN Mk 80kN.m VK 13kN
设 l b 1.5 b
A n
3.88 1.6m l 1.6*1.5 2.4
1.5
5. 验算地基持力层的强度条件 pk max 1.2 fa
f f d 0.5 深度修正后的地基承
载力az特征值 ak,ruan
d m ruan
附加应力
由于建筑物等的荷载作用在土中产生的附加 于原有应力之上的应力,称为附加应力。及附加 应力是由于外荷载(建筑物荷载、车辆荷载、土 中水的渗流力、地震力等)的作用,在土中任意 点产生的应力增量。
机械原理凸轮机构基本尺寸(1)
机械原理
第9章 凸轮机构及其设计
第9章 思考题
1。在设计直动推杆盘形凸轮机构的凸轮廓线时,若 机构的最大压力角超出了许用值,试问可采用哪 几种措施来减小最大压力角或增大许用压力角?
2。设计凸轮基圆半径时应考虑哪些因素?
3。若用滚子推杆的凸轮机构,当出现运动失真时, 应采取哪些措施?
(3)图示位置时推杆位移?
8。图示为摆动滚子推杆盘形 凸轮机构:凸轮是一个半 径为R的偏心圆盘,滚子半 径为r,
(1)基圆半径r0? (2)当滚子从C到D点接触过 程中,凸轮转过多大角度?
机械原理
第9章 凸轮机构及其设计
9。为什么要对凸轮机构的压力角加以限制(应对推程和 回程分别讨论)?
10。当直动尖顶推杆盘形凸轮机构发生自锁现象时,应 采取哪些措施?
平底从动件也会出现运动失
真的情况:一方面,要保证从 动件平底 与凸轮总是相切接触,
则平底的尺寸需要足够大,否 则就会出现运动失真;另一方 面,具有平底从动件的凸轮机 构,其凸轮轮廓的向径不能变 化太快,否则也会出现运动失 真,可加大基圆半径来消除这 种失真。
平底尺寸:
l 2lmax (5 ~ 7)mm
讨论压力角:
(1)压力角是推杆与凸轮接触点处 凸轮法线方向与推杆该点的速度 方向所夹的锐角;
(2)当凸轮廓线的不同点与推杆接 触时,压力角也不同;
(3)压力角是对应于凸轮的理论廓 线的。
不同机构压力角的标定:
机械原理
第9章 凸轮机构及其设计
机械原理
第9章 凸轮机构及其设计
二、凸轮基圆半径的确定
基圆半径与压力角的关系:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
lCP = (s2+s0 )tanα
s2
rb
s0
rb e
2
2
2
C
O
P
n
ds2 e d 1 s 2 tan
e ds2/dφ 1
e2
为使机构的结构更紧凑, α应越大越好
凸轮机构基本尺寸的确定
为了保证凸轮机构能顺利工作,要求: α ≤ [α] [α]= 30˚ ----直动从动件; [α]= 35°~45°----摆动从动件; [α]= 70°~80°----回程。
tan ds2 / d1 e s2 rb 2 e 2
ω1
v2 B
s2
v2 P s0
n
ds2/dφ1
凸轮机构基本尺寸的确定
同理,当导路位于中心左侧时,有: n s2 B ω1 Dα r
min
lOP =lCP- lOC
tan
lCP = ds2/dφ 1 + e
ds2 / d1 e
凸轮机构基本尺寸的确定
一、压力角及许用值
压力角: 凸轮对从动件作用力的方向与从动件 上力作用点的速度方向之间所夹的锐角。
F’----有用分力, 沿导路方向 F”----有害分力,垂直于导路
Ff
n F F’
F”=F’ tg α
F’ 一定时,α↑
F”↑, ω1 若α大到一定程度时,会有:
α
F”
B
Ff > F’
a rT
凸轮机构基本尺寸的确定
四、滚子半径的选择
2、外凸的凸轮轮廓: a rT
a min min rT a
凸轮机构基本尺寸的确定
二、基圆半径的确定
ds2 e d 1 s 2 tan
2
rb
e2
rb在满足αmax≤ [α]条件下,要满足结构和强度要求。
凸轮机构基本尺寸的确定
三、从动件偏置方向的选择
显然,导路和瞬心位 于凸轮轴心同侧时, 压力角将减小。
机构发生自锁。
O
为使机构具有良好的受力状况, α应越小越好
n
凸轮机构基本尺寸的确定
P点为速度瞬心, 于是有:
v2=lOPω1 lOP =v2/ω1
= ds2 /dφ1 = lOC + lCP
n
rbDα O e C
lOC = e lCP = ds2/dφ1- e lCP = (s2+s0 )tanα s0= r2b- e2
tan
ds2 / d1 e s2 rb e
2 2
tan
ds2 / d1 e s2 rb 2 e 2
偏置方向:凸轮逆时针转动,从动件导路偏于凸轮轴心右侧;
凸轮顺时针转动,、滚子半径的选择
1、内凹的凸轮轮廓: