平面机构的结构分析
第二章 平面机构的结构分析
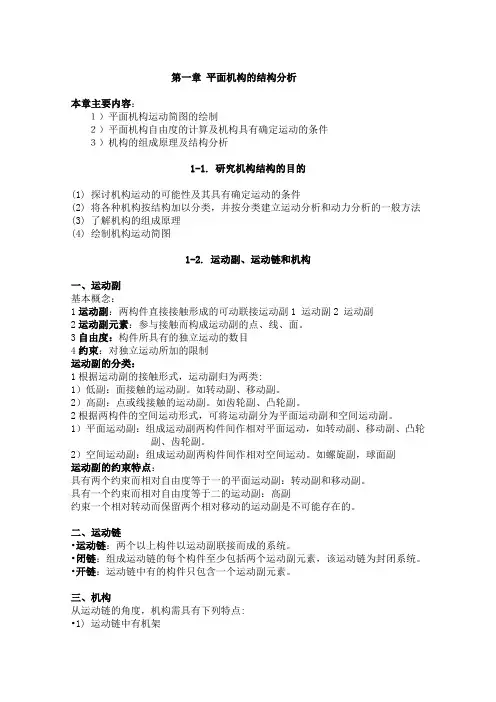
同一运动链可以生成的不同机构
B
1
2
3
A
4
C
B
1
2
3
A 4
B
1
C 2
3
A
4
B
C
2
1 A
曲柄滑块机构 摇块机构 导杆机构
4
3
运动链的生成是创造、获取新机构的重要手段。运动链的设计只关
注构件数和联接这些构件的运动副的数量和类型,所以又称为机构的型
数综合(Type and number synthesis)。
球面高副
柱面高副
齿轮副
凸轮副
★ 运动副元素以面接触的运动副称为低副(lower pair)。
球面低副 回转副
移动副
3. 根据组成运动副两个构件的相对运动形式分类 ★ 空间运动副
球销副
螺旋副
圆柱套筒副
★ 平面运动副 A. 低副
B. 高副
移动副
凸轮副
转动副 齿轮副
三、运动链(Kinematical Chain)与机构 构件通过运动副的连接而构成的可相对运动的系统称为运动链。
4. 运动简图绘制举例
1) 绘制牛头刨床主运动机构的运动简图
选取比例尺l = m/mm
2) 绘制破碎机的机构运动简图
选取比例尺l
3) 绘制图示机构的运动简图
§2-3 机构自由度(Degrees of Freedom)的计算
一、平面机构自由度的计算公式 1. 构件的自由度与约束
构件具有确定运动时所必须给定的独立运动参 数的数目称为机构的自由度。F
由两个以上构件(包括活动构件与机架)在同一处 构成的重合转动副称为复合铰链。
7
46
平面机构结构分析
甘 肃 工 业 大
学运动副
专 用
名称
常用运动副的符号 运动副符号
两运动构件构成的运动副 两构件之一为固定时的运动副
转 动 平副 面 运 动 副移 动 副
22
1
1
2
1 2 1
2
2
1
1
2
1 2 1
22
22
1
1
1
1
2
2
1 2 1
1 2
1
甘
肃
工 业
平
大 学
面
2
专 用
高
副
1
2
螺
旋
1
空副 2
间
1
运
动球 副面
甘
肃 工
⑧计算图示包装机送纸机构的自由度。
业
大 学
分析:
专 用
复合铰链:
位置D ,2个低副
局部自由度 2个
虚约束 1处, 构件8
n= 6,PL= 7,PH= 3
F=3n - 2PL- PH =3×6 -2×7 -3
=1
甘
肃
工 业 大
三、 机构具有确定运动的条件
学
专
用
1 θ1 2
3
S’3 S3
2 1 θ1
目的是搞清楚按何种规律组成的机构能满足运动确 定性的要求。
甘
肃
工 业 大
§2-2 机构的组成
学
专 用
名词术语解释:
1.构件 (Link) -独立的运动单元
内燃机中的连杆
零件(part)-独立的制造单元
2.运动副 (Kinematic pair)
定义: 运动副-两个构件直接接触组成的仍能产生某些
机械原理—平面机构的结构分析
齿轮齿廓
作者:潘存云教授
活塞与缸套
§2-1 运动链与机构
按两构件之间相对运动方式分:
运动副
转动副——两构件之间的相对 运动为转动的运动副
移动副——两构件之间的相对 运动为平动的运动副
对于空间机构,还有螺旋副和球面副
§2-1 运动链与机构
按两构件之间接触方式分:
运动副
低副——两构件之间为面接触 的运动副
第二章 平面机构的结构分析
§2-1 运动链与机构 §2-2 机构运动简图 §2-3 机构自由度的计算 §2-4 机构分析与创新 §2-5 机构结构的拓展内容简介
§2-1 运动链与机构
机构是传递机械运动的装置,也就是传递机械运动、力 或者导引构件上的点按给定轨迹运动的机械装置。
机构的组成要素为构件和运动副。
在
机 架 上
齿 轮 齿
的 电 机
条 传 动
圆
带
锥
传
齿
动
轮
传
动
§2-2 机构的运动简图
链
圆柱
传
蜗杆
动
蜗轮
传动
外啮 合圆 柱齿 轮传 动
凸 轮 传 动
§2-2 机构的运动简图
内啮
棘
合圆
轮
柱齿
机
轮传
构
动
§2-2 机构的运动简图
(3)构件表示时的注意事项:
画构件时应撇开构件的实际外形,而只考虑运动 副的性质。
C D4
A1 1 B
3 2
5
E
6
冲床传动机构运动简图
§2-2 平面机构运动简图
§2-2 平面机构运动简图
§2-2 平面机构运动简图
平面机构的结构分析
平面机构的结构分析
平面机构是一种由多个连接体组成的机械结构,可以用来传递力和运动。
平面机构通常由连杆、转动副和滑动副组成,可以用来实现直线运动、旋转运动等。
在平面机构中,连杆是连接各个连接体的基本元素,它们可以是刚性的,也可以是柔性的。
转动副和滑动副则是连接连杆的关节,用来传递运动或者力的。
转动副能够使连杆产生相对转动运动,滑动副则能使连杆产生相对滑动运动。
根据不同的传动方式,平面机构可以分为平行四杆机构、串联四杆机构、曲柄摇杆机构等。
平行四杆机构由四个长度相等、平行的连杆组成,可以实现直线运动。
串联四杆机构则由多个连杆相互连接组成,可以使得最后一个连杆产生复杂的轨迹运动。
曲柄摇杆机构由一个转动副和一个滑动副组成,可以实现旋转运动。
在设计和分析平面机构时,需要考虑到各个连接体之间的角度关系、长度关系以及运动规律。
通过运用静力学、运动学和动力学等原理,可以对平面机构进行有效地分析和设计,来确定各个连接体之间的关系和运动规律,以实现所需的运动或者力传递。
总之,平面机构是一种重要的机械结构,通过对其结构和运动规律的分析,可以有效地实现力和运动的传递,被广泛应用于各种机械设备和工程中。
机械原理平面机构的结构分析主要内容:
第一章平面机构的结构分析本章主要内容:1)平面机构运动简图的绘制2)平面机构自由度的计算及机构具有确定运动的条件3)机构的组成原理及结构分析1-1. 研究机构结构的目的(1) 探讨机构运动的可能性及其具有确定运动的条件(2) 将各种机构按结构加以分类,并按分类建立运动分析和动力分析的一般方法(3) 了解机构的组成原理(4) 绘制机构运动简图1-2. 运动副、运动链和机构一、运动副基本概念:1运动副:两构件直接接触形成的可动联接运动副1 运动副2 运动副2运动副元素:参与接触而构成运动副的点、线、面。
3自由度:构件所具有的独立运动的数目4约束:对独立运动所加的限制运动副的分类:1根据运动副的接触形式,运动副归为两类:1)低副:面接触的运动副。
如转动副、移动副。
2)高副:点或线接触的运动副。
如齿轮副、凸轮副。
2根据两构件的空间运动形式,可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空间运动。
如螺旋副,球面副运动副的约束特点:具有两个约束而相对自由度等于一的平面运动副:转动副和移动副。
具有一个约束而相对自由度等于二的运动副:高副约束一个相对转动而保留两个相对移动的运动副是不可能存在的。
二、运动链•运动链:两个以上构件以运动副联接而成的系统。
•闭链:组成运动链的每个构件至少包括两个运动副元素,该运动链为封闭系统。
•开链:运动链中有的构件只包含一个运动副元素。
三、机构从运动链的角度,机构需具有下列特点:•1) 运动链中有机架•2) 各构件间有确定的运动1-3.平面机构运动简图一、机构运动简图的定义及作用说明机构各构件间相对运动关系的简单图形.机构运动简图是用规定的运动副符号及代表构件的线条来表示构件和运动副,并按一定比例表示各运动副的相对位置.•组成:线条和符号•符号:表示运动副二、机构运动简图的绘制1.运动副的表示符号:1)两构件构成转动副2)两构件构成移动副3)两构件组成平面高副用两构件接触点(线)附近的两段轮廓表示2.构件的表示方法将该构件上的运动副元素按其位置表示出来,再用简单的线条将这些运动副联接起来,就可表示这个构件。
平面机构的结构分析
第三章平面机构的结构分析机构是机器的主要组成部分。
机构的组成以及机构在什么条件下才具有确定的运动都将在本章中讨论。
另外,为了分析旧机械以及设计新机械,都需要将具体的机械抽象成简单的运动学模型,绘制出机构运动简图,本章也将就这一内容进行介绍。
一、教学要求1. 熟练掌握机构运动简图的绘制,能看懂各种机构运动简图,能根据具体的机械熟练绘制出机构运动简图。
2. 掌握平面机构自由度的计算方法,能正确区分复合铰链、局部自由度和虚约束。
3. 掌握机构具有确定运动的条件。
二、教学重点与难点1•机构运动简图的绘制,是难点之一。
2•机构具有确定运动的条件。
3•平面机构自由度的计算,这是本章的难点之二。
3.1机构的组成3.1.1运动副使两个构件直接接触并能产生相对运动的连接,称为运动副。
如轴承中的滚动体与内、外圈的滚道、啮合中的一对齿廓、滑块与导槽,均能保持直接接触,并能产生一定的相对运动,因此都构成运动副。
构件上参与接触的点、线、面,称为运动副元素。
根据运动副各构件之间的相对运动是平面运动还是空间运动,可将运动副分为平面运动副和空间运动副。
所有构件都只能在相互平行的平面上运动的机构称为平面机构。
本章仅就平面运动副和平面机构进行讨论。
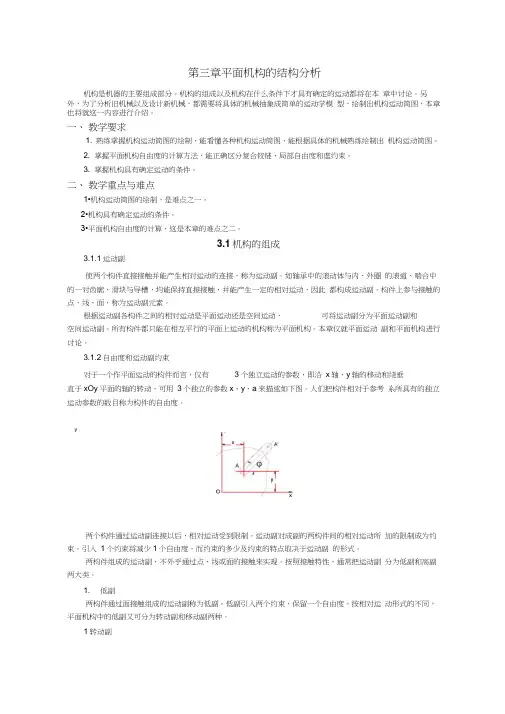
3.1.2自由度和运动副约束对于一个作平面运动的构件而言,仅有3个独立运动的参数,即沿x轴、y轴的移动和绕垂直于xOy平面的轴的转动,可用3个独立的参数x、y、a来描述如下图。
人们把构件相对于参考系所具有的独立运动参数的数目称为构件的自由度。
y两个构件通过运动副连接以后,相对运动受到限制。
运动副对成副的两构件间的相对运动所加的限制成为约束。
引入1个约束将减少1个自由度,而约束的多少及约束的特点取决于运动副的形式。
两构件组成的运动副,不外乎通过点、线或面的接触来实现。
按照接触特性,通常把运动副分为低副和高副两大类。
1. 低副两构件通过面接触组成的运动副称为低副。
低副引入两个约束,保留一个自由度。
平面机构自由度计算及结构分析
平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。
01-05 平面机构的组成原理和结构分析
由图可见,当机构运动时,距离 AO1 、O1O2 均保持不变,因 而此机构可用铰链四杆机构来替代,如1-26b所示。其时,高副C
在这用构件4和位于的两个低副代替了。
1.5 平面机构的组成原理和结构分析
图1-26 高副机构
1.5 平面机构的组成原理和结构分析
上述方法可推广到各种平面高副。例如图2-27a中的具有任 意曲线轮廓的高副机构,可通过接触点C作公法线n-n,在公法 线上找出两轮廓曲线在接触处的曲率中心 O1 和 O2 ,并作为 替代构件的两个转动副,再联接 AO1 和 BO 2 便可得到高副低代
级杆组;依次类推。一般机构中,Ⅱ、Ⅲ级杆最为普遍,其结
构型式如图1-20和1-21所示。
1.5 平面机构的组成原理和结构分析
b
c
d
e a
f
g
h 图1-21 Ⅱ级杆组
i
1.5 平面机构的组成原理和结构分析
a
b
c
d 图1-21 Ⅲ级杆组
e
1.5 平面机构的组成原理和结构分析
2.机构的组成原理 把若干个基本杆组依次联接到原动件和机架上,就可组成 一个新的机构,其自由度数与原动件数目相等。这就是机构的 组成原理。
径为零,所以曲率中心与两构件的
接触点C重合,其瞬时代替机构如 图1-28b所示。
图1-28 尖底从动件盘型凸轮
1.5 平面机构的组成原理和结构分析
(2)若高副两元素之一为一直线,如图1-29a所示,则因 直线的曲率中心在无穷远处,所以这一端的转动副将转化为移 动副。其瞬时代替机构如图1-29b或1-29c所示。
如图1-22中,将图b所示的Ⅱ级组2-3并接在图a所示原动
件1和机架4上便得到图c所示的四杆机构;再将图d所示Ⅲ级组5 -6-7-8并接在Ⅱ级组和机架上,即得图e所示八杆机构。
第2章 平面机构的机构分析
2. 局部自由度 定义:机构中不影响机构 运动规律的自由度。 计算机构自由度的时候, 应该将多余自由度除去. 如右图: F=3n–2PL–PH =3x(3–1)–2x2–1 =1 多余自由度虽然不影 响机构的运动关系,但可以 减少高副接触处的摩擦和 磨损.
3. 虚约束
在机构中与其它约束重复而不起限制运动作用的约束 计算自由度时应将虚约束给去掉 虚约束的存在必须满足一定的条件,如果不满足则变成实 际约束。
两个以上的构件同时在 一处用转动副相连. 当转动副的轴线间的距离 缩小到零时,两轴线重合在一 起,构成了复合铰链. 复合铰链以m个构件构 成,则连接处就有m-1个转 动副.
计算惯性筛机构的自由度.
分析:该机构一共有6个构 件,低副有7个(c处为 复合铰链,含有3-1=2个 转动副),高副没有.
解:F=3n–2PL–PH =3x(6–1) – 2x7- 0 =1
1)不同构件上两点间的距离始终保持不变。
2)两构件构成的多个移动副导路相互平行。
3)两构件构成多个转动副且轴线相互重合。
4)机构中对运动无影响的对称部分
计算下列机构自由度
F=3n-2PL-PH =3×7-2×9-2 =1
第一节 机构的组成
一、零件
零件:标准件;非标准件
二、构件
构件:机器中每一个独立的运动单元体 机架 构件 原动件 从动件 作为参考系的构件 给定运动规律的 活动构件 随原动件运动而 动的构件 简图中机架 打斜线 简图中标上 箭头
三、运动副
运动副: 两构件直接接触而又能产生一定形式的相对运动的连接
1)原动件数大于机构自由度 若原动件1和3给定的运动同 时满足,势必将杆2拉断. 2)原动件数小于机构自由度 当给出两个原动件,使1、 4构件均处于给定位置,才能 使从动件获得确定的运动. 综上所述,机构具有确定运动的条件是: 原动机数目等于机构自由度数目
机械原理之平面机构的结构分析
机械原理之平面机构的结构分析1. 引言平面机构是机械系统中广泛应用的一种结构类型,用于实现转动或传递运动的目的。
它由多个构件组成,通过铰链连接,并具有特定的运动机构。
本文将对平面机构的结构进行分析,包括构件、铰链以及运动机构的特点等。
2. 平面机构的构件平面机构的构件指的是组成机构的各个零件,包括连杆、链条、轴等。
这些构件不仅决定了机构的结构形式,还直接影响着机构的运动性能。
以下是平面机构常见的构件类型:连杆是平面机构中最常见的构件之一,通常由刚性材料制成。
根据连接方式的不同,连杆可以分为刚性连杆和柔性连杆。
刚性连杆由铰链连接,具有一定的长度和刚性,可以实现平面内的转动。
柔性连杆则由柔性材料制成,如弹簧钢,可以在一定程度上变形,用于实现特定的运动要求。
2.2 链条链条是平面机构中连接连杆的重要构件,其作用是通过链节的连接形成平面机构的运动链。
链条通常由多个链节组成,每个链节可以进行相对运动,从而实现机构的运动。
常见的链条类型有平面链条、滚子链条等。
轴是平面机构中支撑和固定构件的一种。
轴的材质可以是金属、合金等刚性材料,具有一定的强度和刚度,用于支撑和固定机构中的其他构件。
轴可以是定轴和动轴,定轴通常起到固定作用,动轴则能够实现旋转运动。
3. 平面机构的铰链连接平面机构中的铰链连接是实现构件之间相对运动的关键。
铰链连接是指通过固定在构件上的铰链来连接构件,使其可以相对旋转。
常见的铰链连接有以下几种形式:3.1 旋转铰链旋转铰链是最基本的铰链连接方式,它通过轴上的固定连接来实现构件的相对旋转。
旋转铰链具有结构简单、工作可靠的特点,广泛应用于机械系统中。
3.2 滑动铰链滑动铰链是一种通过滑动副实现构件间相对运动的铰链连接。
它通常由导向副和滑块副组成,通过滑块在导向副上的滑动来实现构件的相对运动。
3.3 规则铰链规则铰链是一种特殊的铰链连接方式,它通过杆与杆的端部连接来实现构件的相对运动。
规则铰链具有结构简单、工作平稳的特点,在机械系统中广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 平面机构的结构分析2.1 基本概念机器是由一个或多个机构组成的,而机构则是由构件和运动副组成的。
任何机械都是由许多零件组成的。
零件是加工制造的基本单元体。
有时,由于结构和工艺上的需要,往往把几个零件刚性地联接在一起来运动,也就是它们构成一个独立运动的单元体,这个单元体称为构件。
构件可能是一个零件,也可能是若干个刚性联结在一起的零件组成的一个运动整体。
在平面内作自由运动的构件具有三个独立的相对运动;在空间作自由运动的构件具有六个独立的相对运动。
构件的这种独立运动数目称为自由度。
当两构件通过某种方式联接后,它们因直接接触而使某些独立运动受到限制,其自由度将减少。
这种对独立运动的限制称为约束。
构件的约束数目等于其减少的自由度数。
2.1.3 运动副机构中的各个构件是以一定方式联接起来的,而且各构件间应有确定的相对运动。
这种两构件直接接触,又能产生一定相对运动的联接称为运动副。
构件之间的接触形式,可以是平面或圆柱面接触,如图 2.1(a )、(b )所示;也可以是点或线接触,如图2.1(c )、(d )所示。
这种组成运动副的点、线或面称为运动副元素。
两构件组成运动副后,它们之间尚具有哪些相对运动,是由该运动副对这两构件的相对运动所加的限制条件来决定的。
通常运动副可根据运动副的元素来分类。
两构件间为面接触的运动副称为低副。
根据组成低副的两构件之间相对运动性质,又可分为转动副和移动副。
如图2.1(a )中所示,两构件间为圆柱面接触,它们之间的相对运动为转动,称转动副;如图2.1(b )所示,两构件间为平面接触,它们之间的相对运动为移动,称移动副。
两构件间为点或线接触的运动副称高副,如图2.1(c )、(d )所示。
在平面运动副中,低副存在两个约束,具有一个自由度;高副存在一个约束,具有两个自由度。
图2.1运动副(a ) (b )(c ) (d )n若干个构件通过运动副的联接而构成的系统称为运动链。
如果组成运动链中的每个构件上至少包含两个运动副,则必组成一个首末封闭的系统,该系统称为闭式运动链,或简称闭链,如图2.2所示。
各种机械中,采用较多的为闭链。
如果组成运动链中有的构件上只包含一个运动副,它们不能组成一个封闭系统,则称为开式链,或简称开链,如图2.3所示。
在运动链中,若把某一构件固定,该构件就成为机架。
一般情况下,机械是安装在地面上,那么机架相对地面是固定不动的;如果机械是安装在汽车、轮船、飞机等运动物体上,那么机架相对于该运动物体是固定不动的。
在机构中除机架外,如果给运动链中一个或几个构件以确定运动规律运动时,其余构件都能得到确定的相对运动。
机构中,按已知运动规律运动的构件称为主动件,通常主动件也是驱动力作用的构件即原动件,其余活动构件称为从动件或从动件系统。
具备机架、原动件和从动件系统的运动链便称为机构。
2.2 机构运动简图为了便于对机构进行运动及动力分析,我们可以抛开与运动无关的构件和运动副的复杂结构形状,用简单的线条、滑块和运动副的规定符号来代表构件和运动副,按一定比例画出运动副之间的相对位置,使其能准确表达机构运动特性的简单图形,这样的图形称为机构运动简图。
如果仅以构件和运动副代号来表示机构而不按比例绘制,这种图形称为机构示意图。
平面机构运动简图中构件和运动副的表示方法见表2.1。
绘制一台机器的机构运动简图,往往需要反复实践,为便于掌握绘制机构运动简图的技巧,可参照下列方法和步骤进行。
1、启动机器,仔细观察机器的运动,观察其运动原理,认清机架、主动件和从动件。
2、从主动件开始,按着运动传递的顺序,仔细观察各相邻构件之间的相对运动性质,从而确定运动副的类型和数目。
3、合理选择视图平面,目的是为了通过机构运动简图把机构运动特征表达清楚。
图2.2闭式运动链(a )(b )图2.3开式运动链(a ) (b )表2.1 机构运动简图常用符号一般情况选多数构件所在平面作视图平面。
对平面机构,需选择与各构件的运动平面相平行的平面作视图平面。
4、适当选择比例尺。
为了能用机构运动简图对机构进行结构、运动和动力分析,必须把机构中与运动有关的尺寸按比例绘制。
长度比例尺μl 定义为:)()(mm m l 图上长度实际尺寸=μ即机构简图上每毫米长线段所代表的实际长度的米数。
按机构实际尺寸及图纸大小确定μl ,注明在图纸上。
然后把在实际机构上量出的各运动副之间的相对位置尺寸,按长度比例尺换算成简图上的尺寸,再按传递运动的顺序用运动副和构件的表示符号画出整个机构的运动简图。
例2.1 绘制图2.4(a )所示冲床机构的运动简图。
解:该冲床的工作原理是电机带动偏心轮2作顺时针转动,通过构件3、4、5带动冲头6作上下往复移动,从而完成冲压工艺动作。
该机构由机架1、主动件2、从动件3、4、5、6组成,共六个构件。
其中构件1、2,构件2、3,构件3、4,构件1、4,构件3、5,构件5、6均构成转动副;仅构件1、6构成移动副。
测量机构的几何尺寸,选取长度比例尺μl 。
测定CD BC B O AB A O l l l l l 、、、、21、a 、21O O l b 、并换算成图长尺寸,选定构件2的某一位置ϕ2作为绘制简图的位置,从主动件2开始依次画出整个冲床机构的机构运动简图,如图2.4(b )所示。
μl(b )图2.4冲床机构2.3 平面机构自由度计算平面机构的自由度就是机构相对机架的自由度。
如前所述,一个独立作平面运动的构件具有三个自由度,设某机构有n 个活动构件(机架除外),则它们总共有3n 个自由度。
当用运动副将各构件联接起来组成机构后,便给它们之间的相对运动加入一定数量的约束。
如果该机构由P L 个低副和P H 个高副联接而成,因为每一个平面低副引入两个约束,使构件失去两个自由度;每一个平面高副引入一个约束,使构件失去一个自由度。
则机构中的P L 个低副和P H 个高副共引入(2 P L + P H )个约束,使机构减少了同样数目的自由度。
于是平面机构的自由度为:H L P P n F --=23 (2.1)该公式也称为平面机构的结构公式。
由式(2.1)可知,F 为机构相对机架的自由度数,要使机构能运动,必须使F >0。
机构自由度F ≤0时,机构不能运动。
此时它已不是机构而相当于一个刚性桁架。
如前述,机构中按给定运动规律而独立运动的构件为原动件。
通常,原动件是与机架相联的,且与机架组成转动副或移动副。
一个原动件仅具有一个独立运动的参数,例如与机架构成转动副的原动件,只能按一个独立运动的运动规律而回转。
所以,在此情况下,为了使机构具有确定的运动,则机构的原动件数目应等于机构的自由度的数目,这就是机构具有确定运动的条件。
即保证一个自由度的机构具有确定运动,只须给出一个原动件。
对于两个自由度的机构,须给出两个原动件,机构才有确定运动,依次类推。
在应用平面机构自由度计算公式时,要注意以下一些特殊情况。
1、 复合铰链两个以上构件在同一处以转动副相联接,就构成了复合铰链。
如图2.5(a )所示,有三个构件在一起以转动副相联接而构成复合铰链。
从图2.5(b )可以看出,此三个构件组成两个转动副。
同理,若有m 个构件组成复合铰链,实际构成的转动副数为(m -1)个。
所以,在计算机构自由度时应注意复合铰链中转动副数目的计算。
在多个构件组成的转动副中,有机架、杆件、滑块或齿轮等构件时,应仔细查看,特别是对图2.6当中的几种情况要特别注意。
2、局部自由度机构中某构件具有的与整个机构运动无关的自由度称为局部自由度。
在计算机构自由度时应将局部自由度除去不计。
如图2.7(a )所示的滚子直动从动件盘状凸轮机构中,n=3,P L=3,P H =1,其自由度为:F =3n -2P L -P H =3⨯3-2⨯3-1=2。
由图可见,滚子2绕其自身轴线的转动并不影响凸轮1和从动件3的运动,它就是一个局部自由度,计算该机构自由度时应将其除去不计。
此时相当于将滚子2与从动件3固接成一个构件,如图 2.7(b )所示。
显然,此时计算该机构的自由度时:n =2,P L =2,P H =1;则机构的自由度:F =3n -2P L -P H =3⨯2-2⨯2-1=1。
但是,从工程实际出发,为了改善从动件和凸轮的受力情况,这种滚子的转动往往是必不可少的。
3、 虚约束在机构中,某些约束往往与其它约束重复,对机构中构件间的相对运动不起约束作用。
这种对机构运动不起限制作用的约束称为虚约束。
在计算机构自由度时应把它除去不计。
如图2.8(a )所示的机车车轮联动机构,在该机构中AB //CD //EF ,其n=4,P L =6,P H =0,则自由度为:F =3n -2P L -P H =3⨯4-2⨯6-0=0。
这与实际情况是不符的。
这是因为此机构中存在着对运动不起限制作用的虚约束。
即构件4(具有3个自由度)、两个转动副E 、F (引入四个约束),结果总共多了一个对机构运动不起限制作用的虚约束。
若把虚约束除去,使机构变成图2.8(b )所示,该机构自由度为F =3n -2P L -P H =3⨯3-2⨯4-0=1,与实际情况就符合了。
但应注意构件4是在AB //CD //EF 的条件下,对机构才不起约束作用。
一旦条件破坏,构件4就起约束作用,此时机构的自由度为图2.8 虚约束(a )(b ) CC图2.6 复合铰链的几种情况(a )(b )(c )。