基于MATLABsimulink的液压系统动态仿真
基于Matlab_Simulink的液压缸建模与仿真
2003.
作者简介 : 何忠蛟 (1974 - ) ,讲师 ,毕业于浙江大学信息学院 , 硕士 ,从事光通信技术 、电子线路 、光机电一体化技术等研究 ,发表论 文 8 篇. Tel :0571 - 85976253 , E - Mail :he335577 @eyou. com.
线 ,不仅减少了试验工作量 ,降低试验费用 ,而且试 验数据可靠 ,其实用性和曲线拟合性均很好 ,极具推 广价值 。
参考文献 : [ 1 ]高镇同. 疲劳应用统计学[ M ] . 北京 :国防工业出饭社 ,1996. [ 2 ]何忠蛟 ,张志斌. 输送机减速器疲劳试验原理研究 [J ] . 煤矿机
械 ,2004 , (5) :43 - 45. [ 3 ]林毓钅奇 ,陈瀚 ,楼志文. 材料力学 [ M ] . 西安 : 西安交通大学出版
收稿日期 :2005204201
Research of Transporter Restarder Fatigue Curve Based on
Maximum Likelihood Method
HE Zhong - jiao ( Information and Electron Engineering College ,Zhejiang Industry and Trade University , Hangzhou 310035 ,China)
图 6 液压缸位移 x 与时间 t 的关系 Fig. 6 Relation of cylinder’s displacement x and time t
4 结语 从时间流速仿真图形可以看出 ,液压缸的流速
基于Simulink组合机床液压系统设计与仿真
c l d rpso a h p rmee aibe ( ipa e n,v lct c a gn i i yi e i nSe c aa trv r ls d s lc me t eo i h n ig w t tme.h n te e c r e ee a ay e , n t a y) h T e h s u sw r n lzd v
mo e a sa l h d .Usn d lw se tbi e s i g MAT AB t o i l k f r smu ai n a a y i wo l a n d s v r l c r e f h d a l L o ]S mu i o i l t n lss n o u d g i e e e a u v s o y r u i c
磁 换 向 阀或换 向阀来 实 现换 向 , 响应 较慢 , 度较 低 。 精 本 文 利 用 电液 伺 服 比例 阀来将 流 体 控 制 系统 分 析 方 法 引入 液 压 系统 设计 中。电 液伺 服 比例 阀响应 速 度快 , 控
制 精度 高 , 统运 行 平 稳 。本 文 利 用液 压 仿 真技 术 , 立 系 建
Z HA h n s a 。 LU o g p n W ANG u mi 3 S a - h n’ Zh n - i g , Yo - n
(.co l f ca i l n ier gadA tma o Z ein c— ehUnvri , n zo 10 8 1 ho o Meh nc gnei n uo t n, hj gS iT c i sy Haghu3 0 1 ) S aE n i a e t
a d a r a o a l y t m e in i r v me tp o r m u d b v i b e n e s n b e s s e d sg mp o e n r g a wo l e a al l . a Ke r s y wo d :mo u a c i e t o ; y r u i y t ms d sg ; i l k smu ai n d lr ma h n - o l h d a l s se ; e in S mu i , i l t c n o
基于MATLAB/Simulink的脱模液压系统动态特性仿真

【110】第31卷第6期2009-06基于MATLAB/Simulink的脱模液压系统动态特性仿真Dynamical characteristics simulation of pushing mould hydraulicsystem based on matlab/simulink庞 博,侯守全,王 慧,钟 亮PANG Bo, HOU Shou-quan, WANG Hui, ZHONG Liang(内蒙古工业大学 机械学院,呼和浩特 010051)摘 要:研究了利用MATLAB/Simulink软件包对脱模液压系统进行动态仿真的方法。
介绍了Simulink软件包的特点,并以脱模液压缸为对象建立了液压系统的动态模型,给出了仿真模型,详细介绍了如何利用Simulink对液压系统的动态特性进行仿真。
同时,详细讨论了影响液压系统动态特性的主要因素。
这为脱模液压系统的设计和优化提供了重要的依据,对提高脱模液压系统的动态性能具有十分重要的意义。
关键词:仿真;液压系统;动态特性中图分类号:TH 137.5 文献标识码:A 文章编号:1009-0134(2009)06-0110-04收稿日期:2008-12-03作者简介:庞博(1982-),男,山西太原人,硕士研究生,主要从事机电一体化装备研究。
0 引言目前,液压技术的应用场合日益广泛,对液压元件和系统的可靠性、精确性和快速性等要求不断提高,液压系统动态特性的分析研究也日益得到重视。
随着液压系统逐渐趋于复杂和对液压系统仿真要求的不断提高,传统的利用微分方程和差分方程建模进行动态特性仿真的方法已经不能满足需要。
而MATLAB 作为一种面向科学与工程计算的高级语言,集科学计算、自动控制、信号处理、图像处理等功能于一体,它所提供的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,支持连续、离散及两者混合的线性、非线性系统,从而成为对液压系统动态特性进行仿真的强有力的工具。
基于MATLAB的液压系统的设计与仿真

基于MATLAB的液压系统的设计与仿真西南交通大学本科毕业设计(论文)基于MATLAB的液压系统的设计与仿真摘要液压电梯是现代社会中一种重要的垂直运输工具,由于其具有机房设置灵活、对井道结构强度要求低、运行平稳、载重量大, 以及故障率低等优点, 在国内外中、低层建筑中的应用已相当普遍。
液压电梯是集机、电、液一体化的产品,是由多个相互独立又相互协调配合的单元构成,对液压电梯的开发研究涉及机械、液压及自动控制等多个领域。
本文在对液压电梯的实际工作情况做了详细分析后,假定了一个电梯具体的工作条件(包括电梯的最大负载和运行速度等),选定电梯轿厢的支承方式为双缸直顶式、支承液压缸为三级同步液压缸,并设计了满足条件的电梯液压系统。
然后根据电梯的工作条件和已设定参数,对各个液压元件进行了设计计算。
最后结合实际的情况和一些具体的产品,对液压元件的型号和尺寸的进行了确定。
在此基础上,本文对电梯液压系统进行了数学模型的建立,在建模过程中采用拓扑原理建立系统的数学模型,即先根据系统的总体结构建立液压系统的拓扑结构图,将系统分成若干个可以独立的子系统,然后再分别建立每个子系统的数学模型,最后再根据拓扑结构组合成整个大系统的数学模型。
在建立了系统数学模型后,对液压系统进行了仿真分析,得到了系统的速度、压力和位移曲线,这就更直观的反应了系统的运行过程。
根据仿真结果分析,液压缸在运行过程中速度振动较大,本论文将PID控制算法加入到系统中,采用积分分离PID控制方法对本液压系统进行了仿真分析,结果显示加入PID控制方法后系统稳定性得到了提高,具有良好的工作性能。
关键词:液压电梯;双缸直顶式;三级同步液压缸;动态仿真;PID控制目录第1章绪论 (1)1.1液压电梯的发展概况 ........................................................... 错误!未定义书签。
1.1.1 国外液压电梯的发展简况 ....................................... 错误!未定义书签。
复习四:基于Matlab_Simulink的动态系统仿真1
1、对 Simulink 库浏览器的基本操作 2、模块的基本操作: 1)模块的选择
51
2)模块的连接 3)模块的复制 4)模块的移动 5)模块的删除 6)模块的旋转 7)模块名的操作 修改模块名、模块名字体设置、改变模块名的位置、隐藏模块名 8)模块的阴影效果 9)模块颜色的改变 10)模块的插入 3、信号的操作
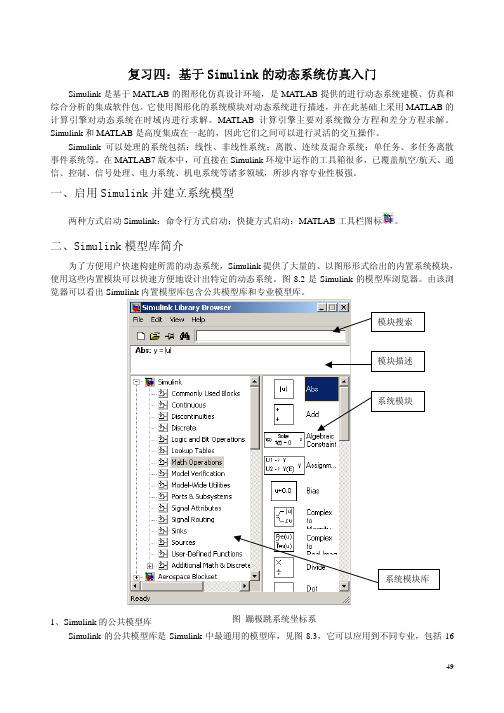
Simulink 可以处理的系统包括:线性、非线性系统;离散、连续及混合系统;单任务、多任务离散 事件系统等。在 MATLAB7 版本中,可直接在 Simulink 环境中运作的工具箱很多,已覆盖航空/航天、通 信、控制、信号处理、电力系统、机电系统等诸多领域,所涉内容专业性极强。
一、启用 Simulink 并建立系统模型
仿真时间设置
求解法设置
仿真步长设置
过零控制
误差设置
2)运行仿真
图 8.25 仿真参数设置对话框
四、基于 Simulink 系统仿真技术应用举例
例
连续的非线性系统举例。利用
Simulink
计算
Van
der
pol
方程:
⎧ ⎨ ⎩
x 2
=
x1 = x2 −m(x12 − 1)x2
−
x1
,并用示波
器 Scope 显示状态量 x1 和 x2 。
图 8.3 Simulink 的公共模型库
50
2、Simulink 的专业模型库 前面对 Simulink 的公共模型库做了详细的介绍,除了公共模型库外,Simulink 中还集成了许多面向
不同专业的专业模型库,不同领域的系统设计师可以使用这些系统模块快速构建自己的系统模型,然后 在此基础上进行系统的仿真、分析,从而完成设计任务。下面仅介绍几种控制工程师可能用到的专业模 型库的主要功能。 1)航空航天模型库(Aerospace Blockset)
如何使用MATLABSimulink进行动态系统建模与仿真

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
Simulink在液压控制系统仿真中的应用
Simulink 在液压控制系统仿真中的应用1 简介液压控制系统的动态响应仿真计算一直是液压行业不断研究的一个门类,在液压控制系统中有着广泛的应用。
由于液压动力机构是动态元件,其动态特性很大程度上决定着整个液压伺服系统的性能,其中四通阀控液压缸是最常见的动力机构,也是泵控系统中伺服变量泵的前置级。
以前一般采用个人编程的方法来实现系统的动态响应,但是往往要花费大量的时间来处理程序本身的问题,并且容易出错、通用性差。
SIMULINK 的问世给液压系统的动态仿真计算提供了强大的工具,在SIMULINK 环境中只需利用鼠标就可以直观的画出系统模型,然后就可以直接进行仿真,并且在仿真过程中可以随时更改某些参数,以观察其对控制系统的影响,实现了对液压控制系统的智能设计。
2 四通阀控液压缸的基本方程(1)滑阀的流量方程假设:阀是零开口四边滑阀,四个节流窗口时匹配和对称的,供油压力s p 恒定,回油压力0p 为零。
阀的线性化流量方程为图1四通阀控液压缸原理图L q V c Lq K x K p =- (1)在动态分析时,需要考虑泄漏和油液压缩性的影响。
由于液压缸外泄漏和压缩性的影响,使得流入液压缸的流量1q 和流出液压缸的流量2q 不相等,即12q q ≠。
为了简化分析,定义负载流量为12L 2q q q +=(2) 式中 q K ——四通阀的流量增益;c K ——四通阀的流量—压力系数; V x ——阀芯的位移; L q ——负载压力。
(2)液压缸流量连续性方程流入液压缸进油腔的流量1q 为p 111pip 121()ep e dx V dp q A C p p C p dtdt β=+-++(3)从液压缸回油腔流出的流量2q 为p 222pip 122()ep e dx V dp q A C p p C p dtdtβ=+-++(4)式中 p A ——液压缸活塞有效面积; p x ——活塞位移;ip C ——液压缸内泄漏系数; ep C ——液压缸外泄漏系数;e β——有效体积弹性模量(包括油液、连接管道和缸体的机械柔度); 1V ——液压缸进油腔的容积(包括阀、连接管道和进油腔); 2V ——液压缸回油腔的容积(包括阀、连接管道和回油腔)。
基于SIMULINK的液压系统动态仿真
基于SIMULINK的液压系统动态仿真 杨志坚,米柏林,赖庆辉(东北农业大学 工程学院,哈尔滨 150030) 摘 要:通过采用MATLAB语言的SIMULINK软件包对液压系统进行动态仿真的方法,以开关型阀控缸为例,建立了液压系统的动态模型,并给出了仿真模型。
通过对系统的参数初始化,进行仿真。
结果表明,SIMULINK方法是对液压系统的动态特性进行仿真的一条有效途径。
关键词:计算机应用;SIMULINK;仿真;动态特性;液压系统 中图分类号:TP391.9;TH137 文献标识码:A 文章编号:1003─188X(2005)05─0093─02 随着液压系统趋于高压、大流量,液压系统的复杂性不断提高。
传统的利用微分和差分方程建模进行动态特性仿真的方法已经不能满足需要。
液压系统的动态仿真方法逐渐得到了广泛的应用,对于改进液压系统的设计、提高系统的可靠性都具有重要意义。
MATLAB语言集科学计算、自动控制、信号处理等功能于一体,具有较高的编程效率。
同时,MATLAB还提供了SIMULINK软件包,利用该软件包可以方便地对液压系统的动态特性进行仿真[1]。
1 液压系统动态建模 图1是一个常见的开关型阀控缸系统,泵出的油经换向阀进入液压缸,并通过换向阀控制液压缸进、排油,从而实现活塞运动及换向。
液压缸进油腔和回油腔流量连续性方程及活塞运动方程[2]为 t pC p A q c d d 11111++=λυ (1) t p C p A q c d d 22222−−=λυ (2) F B tmA p A p ++=−υυd d 2211 (3) 式中 1q 、2q —流进、流出液压缸的流量(m3/s); 1A 、2A —液压缸进油、排油腔活塞面积(m2); 1p 、2p —液压缸进、排油压力(Pa); υ—活塞运动速度(m/s); c λ—液压缸的泄漏系数(m3・Pa/s); m —活塞及负载的总质量(kg); B —黏性阻尼系数(N・s/m); F —负载力(N ); 1C 、2C —进油、排油腔及其管路的液容。
基于SIMULINK的液压伺服系统仿真
基于SIMULINK的液压伺服系统仿真摘要: 液压伺服系统作为控制系统的一种有效的控制方法,在工程中有着及其重要的地位。
对液压伺服系统进行仿真可以有效了解系统的稳定性,实现对系统的智能设计。
关键词: Simulink ; 液压伺服系统; 仿真0 引言液压伺服控制系统具有良好的控制性能,因此在工业控制系统中有着广泛的应用。
利用计算机对系统进行仿真,无论对其性能分析,还是系统辅助设计,都有重要的意义。
因此,液压伺服控制系统仿真一直是研究的重点。
本文利用MATLAB 软件中的动态仿真工具SIMULINK,构造了位控液压伺服控制系统仿真模型。
然后以位控液压位置伺服系统的实例进行仿真,并对其进行系统性能分析。
1 液压伺服系统的统一方块图无论是机液伺服系统还是电液伺服系统,无论是阀控式还是泵控式,无论执行元件是液压缸,还是液压马达,无论是位置系统还是速度系统,其数学模型都有着统一的形式。
各种不同的液压伺服系统,除了其信号输入、放大、校正、反馈、转换的方式不同以外,其“液压执行”部分的数学特性的形式是类同的。
掌握这个规律,不难获得液压伺服系统的数学模型。
其统一的方块图如图1 所示。
图1 液压伺服系统的统一方块图2 伺服系统仿真在获得电液伺服系统的统一方块图后,来建立一个由伺服阀- 液压缸- 位置负反馈- 比例调节器组成的位置伺服系统在干扰负载为零时的动态结构图(见图2) 。
图2 液压伺服系统的动态结构图W. 预先给定的活塞位置输入信号KR. 放大器的增益K1 伺服阀放大系数Ts , as . 伺服阀时间常数和阻尼比伺服阀的输出流量可近似用Q = KQy 表示, 此处y 表示伺服阀内功率放大元件即滑阀的位移, KQ是滑阀流量增益。
液压缸传递函数的参数是TM (时间常数) 、aM (阻尼比) 和KM (放大系数) 。
液压缸输出物理量为速度v , 经积分环节得活塞的运动位置x 的轨迹。
已知某电液伺服系统的测试数据如仿真模块图2 ,经适当计算, 将结果代人结构图, 然后建立SIMULINK仿真程序下的仿真模块图,如图3 所示。
采用MATLAB+Simulink的液压管路瞬态压力脉动分析
图3
选择算子 常数
分别加上两个边界条件
p2 p3 Μ p′ = p n p0
则构成两个新的向量
q0 q q′ = 1 Μ qn −1
∂p 在 Simulink 中的表达方式 ∂x ∂p Fig.3 Simulink diagram of ∂x
整个管路动态压力脉动特性分析的 Simulink 仿 真块图如图 4 所示 其中子系统 subsystem 为包括 稳态项和瞬态项的摩擦力项
常数 2
积分器 1 选择算子 2
选择算子 1 常数 1 积分器 2
子系统
图4 Fig.4
Simulink 仿真块图
Simulink simulating module 表2 Table 2 仿真参数
q ðr02
=
其中系数 ni 和 mi 采用日本研究人员 KAGAWA 给 出的数值[5] 如表 1 所示
表1 Table 1 系数 ni 和 mi 值
Coefficients ni and mi
t
1 2 3 4 5 6 7 8 9 10
ni
2.63744×101 7.28033×101 1.87424×102 5.36626×102 1.57060×103 4.61813×103 1.36011 ×104 4.00825×104 1.18153×105 3.48316×105
Abstract: The mathematical model of fluid transients inside hydraulic pipelines is introduced including the unsteady friction item. A new method using SELECTOR block in MATLAB Simulink is developed to handle the integration in spatial domain when solving the partial differential equations. Using this method, the pressure transients inside hydraulic pipelines can be predicted both in time and spatial domains. A straight pipeline with a hydraulic valve on one side and a reservoir on the other side is studied as an example. The pressure pulsations inside the pipeline after the valve is shut off are simulated using the new method. The simulation results are given and compared with the predictions from characteristics method and finite element method published previously. The high frequency oscillation problem created by the numerical analysis is also discussed. Key words: pressure pulsations; pipeline transients; MATLAB Simulink; hydraulic pipeline; partial differential equation 在石油输送管网系统 航空航天燃油供给系统 以及液压传动系统中 由于阀门的突然开关 泵的 失效以及执行元件止动等原因 管道中将产生沿管 路传播的压力脉动波 这种现象会导致传输 传动 及控制系统性能的下降 例如泵效率的降低 系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
dt
4e dt
AppL
mt
d 2 xp dt 2
Bp
dxp dt
Kxp
FL
QL KqXv KCPL QL ApsXp CtpPL Vt sPL
4e
ApPL mts2 Xp BpsXp KXp FL
图2 阀控液压缸的方块图
建立simulink仿真 模型
图3 液压系统仿真模型
为了便于模拟,对模型各个参数进行初始化。其中Step模块为系统提 供一个阶跃信号,与阀芯位移有关。
基于Simulink的液压系统动态仿真
汇报人:xxx
一、阀控液压系统缸简介
➢ 液压动力元件可以分为四种基本形式:阀控液压缸、阀控液压马达、泵控 液压缸和泵控液压马达。四种液压动力元件虽然结果不同,但其特性是类 似的。
➢ 阀控液压缸系统是工程上应用较广泛的传动和动力系统。由于阀控对称液 压缸系统比阀控非对称液压缸系统具有更好的控制特性,因此,在实际生 产中得到了广泛的应用,但是对称液压缸加工难度大,滑动摩擦阻力较大, 需要的运行空间也大,而非对称液压缸构造简单,制造容易。
➢ 滑阀流量方程: qL Kqxv KCpL
➢ 液压缸流量 qL Ap dxp CtppL Vt dpL
连续性方程:
dt
4e dt
➢
液的压力缸平和衡负方载程:AppL
mt
d 2 xp dt 2
Bp
dxp dt
Kxp
FL
三个基本方程经过拉氏变换得:
qL Kqxv KCpL
qL Ap dxp CtppL Vt dpL
表1 仿真参数
仿真结果 (取样时间T=1s)
由仿真结果图得出:
图4 系统压力P/Pa
图5 油缸输出力F/N
可以看出系统的压力与液压缸的输出力从0逐渐上升,在t=0.5s时,系统达到 稳定状态,此时系统压力为 P=7.41×106 Pa,液压缸的输出力为F=5000 N, 符合预期设计要求
图6 活塞杆位移Xp/m
四通阀控制对称液压缸是液压系统中一 种常带有弹性和粘性阻尼的负载作往复 运动。其中,假定供油压力Ps恒定, 回油压力P0近似为零。
图1 四通阀控制对称液压缸原理图
图2 常见四通阀图片
二、仿真
1、Simulink简介 ➢ 可实现动态系统建模、仿真、分析等。广泛应用于线性系统、非线性系统、
数字控制及数字信号处理的建模和仿真中。
➢ 采用方块图结构图形对接,跟用笔和纸来画一样容易,与传统仿真软件相比, 更直观、方便、灵活。
➢ 可从上到下、左到右创建模型,可以编辑子系统,随意性较高
2、案例
设计一个结构物的疲劳试验机,已知:结构物刚度K=2.55×106N/m,结 构物质量m=18 k g;要 求 最 大加载力Fmax=5×103N,设计时系统的油 源压力取:Ps=10×106 Pa 。
可以看出开始时,活塞杆的位移 很快达到2.8 mm且有振荡,随后 在系统达到稳定状态的过程中, 活塞杆的位移逐渐减小到0,这表 明活塞杆只在结构物破坏的一瞬 间有位移,其他时间活塞杆只输 出力而没有位移