第8章思考题与习题答案
第8章 定性资料的比较思考与练习参考答案

第8章定性资料的比较思考与练习参考答案一、最佳选择题1. 定性资料的统计推断常用( D )。
A. t检验B. 正态检验C. F检验D. 2χ检验E. t′检验χ检验自由度为(A)。
2. 两组二分类资料发生率比较,样本总例数100,则2A. 1B. 4C. 95D. 99E. 100χ检验中,2χ<1,05.02χ,可以认为(B)。
3. 四格表2A. 两总体率不同B. 不能认为两总体率不同C. 两样本率不同D. 不能认为两样本率不同E. 以上都不对4.等级资料比较宜采用(E)。
A. t检验B. 2χ检验C. F检验D. 正态检验E. 秩和检验5. 为比较治疗某病的新疗法与常规方法,试验者将100名患者按性别、年龄等情况配成对子,分别接受两疗法治疗。
观察得到有28对患者同时有效,5对患者同时无效,11对患者新药有效常规治疗无效。
欲比较两种疗法的有效率是否相同,应选择的统计分析方法为(D)。
χ检验 B. 独立的两组二分类资料比较校正2χ检验A. 独立的两组二分类资料比较2χ检验 D.配对的两组二分类资料比较校正2χ检验C. 配对的两组二分类资料比较2E. Fisher确切概率法二、思考题χ检验适用的数据类型。
1. 简述2答:提示:卡方检验是应用较广的一种定性资料的假设检验方法,常用于检验两个或多个样本率(或构成比)之间有无差别。
2. 两组二分类资料的设计类型有几类?其相应的检验方法是什么?)m n A n()m n A n()nm n nA m n A (n m n /n)m (n /n m n A A n/nm n /n)m n (A T )T (A χRi Cj ji ijRi Cj ji ij j i ij Ri Cj ji ij Ri Cj ji j i j i ij ij R i Cj j i j i ij R i Cj ijij ij 11222112112211211221121122-=+-=+-=+-=-=-=∑∑∑∑∑∑∑∑∑∑∑∑============答:提示:两组二分类资料的设计类型主要有2类,即完全随机设计和配对设计。
第8章思考题和习题解答
第八章变电所二次回路和自动装置8-1 变电所二次回路按功能分为哪几部分各部分的作用是什么答:变电所二次回路按功能分为断路器控制回路、信号回路、保护回路、监测回路、自动控制回路及操作电源回路等。
①断路器控制回路的主要功能是对断路器进行通、断操作,当线路发生短路故障时,相应继电保护动作,接通断路器控制回路中的跳闸回路,使断路器跳闸,起动信号回路发出声响和灯光信号。
②信号回路是用来指示一次电路设备运行状态的二次回路。
信号按用途分,有断路器位置信号、事故信号和预告信号。
③保护回路是用来对变电所设备进行保护。
④监视和测量回路是用来对变电所各线路进行监视和测量,以满足电气设备安全运行的需要。
⑤自动控制回路是用来实现自动重合闸和备用电源自动投入。
⑥操作电源回路是用来提供断路器控制回路、信号回路、保护回路、监测回路、自动控制回路等所需的电源。
8-2 二次回路图主要有哪些内容各有何特点答:二次回路图主要有二次回路原理图、二次回路展开图、二次回路安装接线图。
①二次回路原理图主要是用来表示继电保护、断路器控制、信号等回路的工作原理,在该图中一、二次回路画在一起,继电器线圈和其触点画在一起,有利于叙述工作原理,但由于导线交叉太多,它的应用受到一定的限制。
②二次回路展开图将二次回路中的交流回路与直流回路分开来画。
交流回路又分为电流回路和电压回路,直流回路又有直流操作回路与信号回路,在展开图中继电器线圈和触点分别画在相应的回路,用规定的图形和文字符号表示。
③二次回路安装接线图画出了二次回路中各设备的安装位置及控制电缆和二次回路的连接方式,是现场施工安装、维护必不可少的图纸。
8-3 操作电源有哪几种,直流操作电源又有哪几种各有何特点答:二次回路的操作电源主要有直流操作电源和交流操作电源两类,直流操作电源有蓄电池和硅整流直流电源两种。
蓄电池主要有铅酸蓄电池和镉镍蓄电池两种。
①铅酸蓄电池具有一定危险性和污染性,需要专门的蓄电池室放置,投资大。
《世界经济概论》思考题答案第8章思考题答案

1.简述二战后国际直接投资的发展历程。
答:分为三个时期:一、二战后到20世纪70年代初的快速发展时期这一时期的国际直接投资有两个显著的特点:一是美国居主导地位。
二是发达国家之间“双向投资”迅速发展。
20世纪50年代后半期以后,随着欧洲经济的复兴,欧洲国家开始对美国进行直接投资,日本企业也开始进军国际市场,因此发达国家之间的“双向投资”得到迅速发展。
二、20世纪70年代中后期到90年代末的高潮迭起时期以70年代中期发生的国际直接投资总额超过国际间接投资总额为标志,国际直接投资逐步形成向全球大规模扩展的新阶段,期间出现了三次国际直接投资高潮。
三、进入21世纪以来出现的新趋势1.国际直接投资发展呈现较大的波动性2.国际直接投资大量流向发展中国家和转型经济体3.一些新兴经济体已经成为国际直接投资主体的新成员2.试述国际直接投资的动因和主要方式。
答:国际直接投资的动因1.市场导向型动因市场导向型投资是指跨国公司为了追求规模经济效益、扩大原有市场、拓展新市场和克服贸易障碍等而进行的对外直接投资。
(1)扩大原有市场。
(2)拓展新市场。
(3)克服贸易障碍。
2.资源导向型动因资源导向型投资是指跨国公司为了从国外获取稳定而廉价的生产要素资源、降低生产成本,进而增强产品竞争力、提高经济效益而进行的对外直接投资。
(1)获取自然资源。
(2)利用人力资源。
(3)获得技术与品牌资源。
3.效率导向型动因效率导向型投资是指为利用各国在生产要素、经济体制、文化传统和政府政策等方面的差异,在全球范围内配置资源,进而降低生产成本,获得规模经济效益而进行的对外直接投资。
(1)降低产品成本。
(2)追求规模经济效益。
4.优惠政策导向型动因优惠政策导向型投资是指企业为了享有东道国的优惠政策而进行的对外直接投资。
东道国的优惠政策主要包括税收优惠政策、融资优惠政策、土地使用优惠政策等,这些优惠政策大大降低了企业的生产经营成本,为企业奠定了市场竞争的优势。
《电力系统分析》第8章习题答案
−
j
900
⎥ ⎥
=
⎢ ⎢0.494e
j 2550
⎥ ⎥
1 ⎥⎦⎢⎣2e j1350 ⎥⎦
⎢⎣0.195e
j1350
⎥ ⎦
8-13 试画出图 8-62 所示电力系统 k 点发生接地短路时的正序、负序和零序等值网络。
图 8-62 习题 8-13 附图
解:正序、负序、零序等值网络见下图 a)、b)、c)。
(3)k 点发生 a、c 两相接地短路时
Ib1
=
j( X 1∑
E1Σ
=
+ X 2∑ // X 0∑ )
j1 j(0.202 + 0.214 // 0.104)
= 3.677
Ib2
=
−
X 0∑ X2∑ + X0∑
Ib1
=
−
0.104 0.214 + 0.104
× 3.677
=
−1.203
Ib0
=
−
X 2∑ X2∑ + X0∑
Ib1
=
− 0.214 × 3.677 0.214 + 0.104
=
−2.474
U b1 = U b2 = U b0 = − jX 2∑ Ib2 = − j0.214 × (−1.203) = j0.257
Ib = 0
Ic = a 2 Ib1 + aIb2 + Ib0 = e j240° × 3.677 − e j120° ×1.203 − 2.474 = 5.624e− j131.29° Ia = aIb1 + a2 Ib2 + Ib0 = e j120° × 3.677 − e j240° ×1.203 − 2.474 = 5.624e j131.29° Ub = 3Ub1 = 3× j0.257 = j0.771 U a = U c = 0
第8章 自我沟通-习题答案[3页]
![第8章 自我沟通-习题答案[3页]](https://img.taocdn.com/s3/m/bcb4ab47dcccda38376baf1ffc4ffe473368fdee.png)
第8章自我沟通参考答案【知识小测】一、选择题1.B2.A3. B4.C5.D二、判断题1. √2. ×3. √4.√5. √三、思考题1.参考答案:自我沟通是指发生在同一行为主体身上的自我意识沟通,即信息发送者和信息接收者为同一行为主体。
通俗地说,自我沟通就是自己与自己对话。
在自我沟通过程中,通过个体的独立思考、自我反省、自我知觉、自我激励、自我冲突以及自我批评,进而达到自我认同,最终实现内心平衡。
(无标准答案,结合自身实际情况,谈谈对自我沟通的认识即可。
)2.参考答案:从自我沟通的过程可以看出,自我沟通既与一般人际沟通具有相似性,又在具体要素和活动上有自身的特殊性,两者之间的差异主要体现在以下几方面:(1)主客体差异;(2)目的差异;(3)媒介差异;(4)过程差异。
3.参考答案:自我暗示是指通过自己的认知、言语、思维和想象等心理活动,向自己发出刺激,以影响自己的情绪、意志和行为的一种心理方法。
运用自我暗示进行自我沟通,就是通过调动自身潜在的力量激励自我、调节自我、重塑自我,使自己处于最佳精神状态。
例如,有的驾驶员在车窗前悬挂平安吊坠以求平安。
(无标准答案,结合自身实际情况,谈谈自我暗示在自我沟通中的作用即可。
)4.参考答案:由约哈瑞窗可知,自我沟通中存在开放区域、盲目区域、秘密区域和未知区域。
在“约哈瑞窗口”理论的盲目区域、未知区域,人们对自我的认识是不完整的,如个性、爱好、适宜的工作等。
这就会对自己的缺点、弱势缺乏理性的认识,从而导致个体很难与自己的内心进行理性的自我沟通,从而产生自我沟通障碍,很难全面认识自我。
(无标准答案,结合自身实际情况,回答“是否已经认识自我,如何反省自我、激励自我、超越自我”即可。
)【技能训练】一、自我剖析略二、能力测评略三、沟通训练1.略2.无标准答案,根据自身实际情况回答问题即可。
3.无标准答案,根据自身实际情况回答问题即可。
注意从客观角度出发进行自我剖析,分清现实的我、理想的我和未来的我在身材、外貌、气质、情绪控制方面存在的差异。
第8章 ARP、RARP和ICMP习题与思考题参考答案

第8章ARP、RARP和ICMP习题与思考题习题(1)简述Internet的域名系统(Internet被划分成可理解的分组或域,将几个域名按从大到小、从右到左的顺序(即最右边的域是最大的域)连接起来,就构成了一个互联网地址。
终端计算机上的终端用户名,经常用@符号加到域名的最左端。
这种地址是一种电子地址,格式是固定的,其格式为:主机名.类型名.机构名.最高层域名)(2)什么是ARP?(ARP (Address Resolution Protocol) 是个地址解析协议。
在IP-以太网中,当一个上层协议要发包时,有了节点的IP地址,ARP就能提供该节点的MAC地址。
)(3)为什么要有ARP?(OSI模式把网络工作分为七层,彼此不直接打交道,只通过接口(layer interface).IP地址在第三层,MAC地址在第二层。
协议在发送数据包时,得先封装第三层(IP地址),第二层(MAC地址)的报头,但协议只知道目的节点的IP地址,不知道其MAC地址,又不能跨第二、三层,所以得用ARP的服务。
)(4)简述地址解析(地址解析协议(ARP,Address Resolution Protocol)是获取物理地址的一个TCP/IP协议。
地址解析协议是一个位于TCP/IP协议栈中的低层协议,负责将某个IP地址解析成对应的MAC地址。
)(5)简述ARP原理(某机器A要向主机B发送报文,会查询本地的ARP缓存表,找到B的IP地址对应的MAC地址后,就会进行数据传输。
如果未找到,则广播A一个ARP请求报文(携带主机A的IP地址Ia——物理地址Pa),请求IP地址为Ib的主机B回答物理地址Pb。
网上所有主机包括B都收到ARP请求,但只有主机B识别自己的IP地址,于是向A主机发回一个ARP响应报文。
其中就包含有B的MAC地址,A接收到B的应答后,就会更新本地的ARP缓存,接着使用这个MAC地址发送数据(由网卡附加MAC地址)。
思考题与习题解答
第八章思考题与习题解答8-3 试判断下列说法是否正确。
用√或×表示在括号内。
(1)只要满足相位平衡条件,且1AF,就可产生自激振荡。
( )(2)对于正弦波振荡电路而言,只要不满足相位平衡条件,即使放大电路的放大倍数很大,它也不可能产生正弦波振荡。
( )(3)只要具有正反馈,就能产生自激振荡。
( )答:(1) √。
(2) √。
(3) ×。
相位条件满足后,还需同时满足幅度条件才能振荡,两个条件缺一不可。
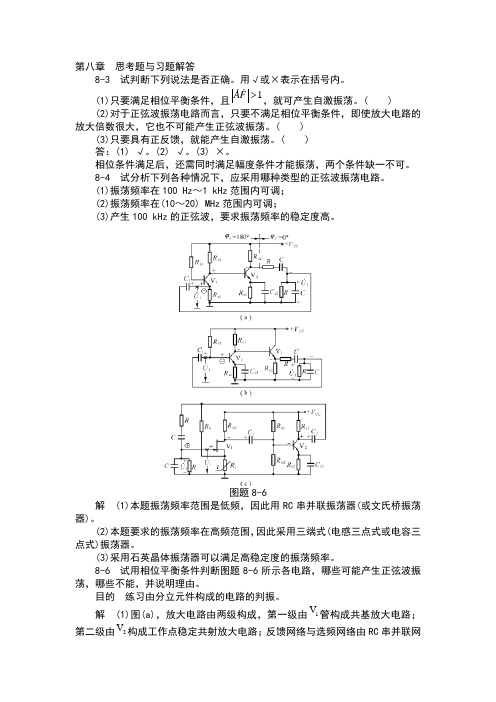
8-4 试分析下列各种情况下,应采用哪种类型的正弦波振荡电路。
(1)振荡频率在100 Hz~1 kHz范围内可调;(2)振荡频率在(10~20) MHz范围内可调;(3)产生100 kHz的正弦波,要求振荡频率的稳定度高。
图题8-6解 (1)本题振荡频率范围是低频,因此用RC串并联振荡器(或文氏桥振荡器)。
(2)本题要求的振荡频率在高频范围,因此采用三端式(电感三点式或电容三点式)振荡器。
(3)采用石英晶体振荡器可以满足高稳定度的振荡频率。
8-6 试用相位平衡条件判断图题8-6所示各电路,哪些可能产生正弦波振荡,哪些不能,并说明理由。
目的练习由分立元件构成的电路的判振。
解 (1)图(a),放大电路由两级构成,第一级由1V管构成共基放大电路;第二级由2V构成工作点稳定共射放大电路;反馈网络与选频网络由RC串并联网络构成。
反馈信号f U 取自RC 并联支路上,上正下负。
断开f U 与放大电路输入端1C (或左或右均可)处,并在此处与地之间加入一个信号i U ,用瞬时极性法(见图中的正、负号)判别此反馈为负反馈(即i U 与f U 反相),因此此电路不可能振荡。
或者用相位条件表达式求φ:A f φϕϕ=+ 因为第一级共基电路不反相,第二级共射电路反相,一共反相一次,因此A ϕ=180°RC 串并联网络不反相,因此f ϕ=0°则 ϕ=180°+0°=180°不满足相位平衡条件,不能振荡。
《电机学》习题解答(吕宗枢) 08章
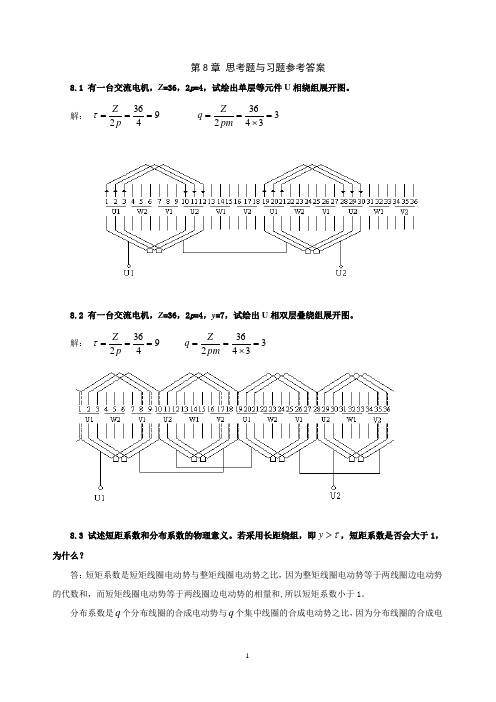
第8章 思考题与习题参考答案8.1 有一台交流电机,Z =36,2p =4,试绘出单层等元件U 相绕组展开图。
解: 94362===p Z τ 334362=⨯==pm Z q8.2 有一台交流电机,Z =36,2p =4,y =7,试绘出U 相双层叠绕组展开图。
解: 94362===p Z τ 334362=⨯==pm Z q8.3 试述短距系数和分布系数的物理意义。
若采用长距绕组,即τ>y ,短距系数是否会大于1,为什么?答:短矩系数是短矩线圈电动势与整矩线圈电动势之比,因为整矩线圈电动势等于两线圈边电动势的代数和,而短矩线圈电动势等于两线圈边电动势的相量和,所以短矩系数小于1。
分布系数是q 个分布线圈的合成电动势与q 个集中线圈的合成电动势之比,因为分布线圈的合成电动势等于q 个线圈电动势的相量和,而集中线圈的合成电动势等于q 个线圈电动势的代数和,所以分布系数数小于1。
即使采用长矩绕组,短矩系数仍然小于1。
因为长距线圈电动势仍然等于两线圈边电动势的相量和,它一定小于两线圈边电动势的代数和。
8.4 一台三相交流电机接于电网,每相感应电动势的有效值E 1=350V ,定子绕组的每相串联匝数N =312,基波绕组系数k w 1=0.96,求每极磁通1Φ。
解:根据11144.4Φ=W fNk E 可知 00526.096.03125044.435044.4111=⨯⨯⨯==ΦW fNk E Wb 8.5 一台三相交流电机, f N =50H Z ,2p =4,Z =36,定子为双层叠绕组,并联支路数a =1,τ97=y ,每个线圈匝数N c = 20,每极气隙磁通1Φ=7.5×10-3Wb ,求每相绕组基波感应电动势的大小。
解: 20363602360=⨯=⨯=Z p α 334362=⨯==pm Z q 94.070sin )9097sin()90sin(1==⨯=⨯= τyk y 96.010sin 330sin 220sin 32203sin 2sin 2sin 1==⨯==ααq q k q 9.096.094.01=⨯=W k 240120342=⨯⨯==a pqN N c V fNk E W 360105.79.02405044.444.43111=⨯⨯⨯⨯⨯=Φ=-8.6 有一台三相同步发电机,2极,转速为3000r/min ,定子槽数Z=60,每相串联匝数N =20,每极气隙磁通1Φ=1.505Wb ,求:(1)定子绕组基波感应电动势的频率;(2)若采用整距绕组,则基波绕组系数和相电动势为多少?(3)如要消除5次谐波电动势,则线圈节距y 应选多大,此时的基波电动势为多大?解:(1)Hz pn f 50603000160=⨯== (2)302602===p Z τ 6603601360=⨯=⨯=Z p α 1032602=⨯==pm Z q 因为采用整距绕组,故 11=y k 95537.03sin 1030sin 26sin 102610sin 2sin 2sin 11==⨯=== ααq q k k q w V fNk E W 6384505.195537.0205044.444.4111=⨯⨯⨯⨯=Φ=(3)取τ54=y 951.072sin )9054sin()90sin(1==⨯=⨯= τy k y V fNk E W 16.6071505.1951.095537.0205044.444.4111=⨯⨯⨯⨯⨯=Φ=8.7 为什么说交流绕组产生的磁动势既是时间的函数,又是空间的函数?答:单相绕组产生的磁动势沿空间(气隙圆周)按余弦规律分布,所以是空间的函数,其幅值大小又随时间按正弦规律变化,所以又是时间的函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
思考题与习题
1.SRD系统一般由____________、_____________、____________三大部分组成。
2.试分析开关磁阻电动机与步进电动机的异同。
3.比较开关磁阻电动机控制系统与步进电动机驱动系统的异同,各自有何特点?
4.开关磁阻电机相对步进电机等控制电机来说,在应用上,更注重其本身的________指标。
5.SR电动机在工作中总是遵循____________原理。
6.当开关磁阻电机的某定、转子的凸极中心线重合,此时有________。
()
A. 磁阻最大,绕组电感最小;
B. 磁阻最小,绕组电感最大;
C. 磁阻最大,绕组电感最大;
D. 磁阻最小,绕组电感最小
7.当开关磁阻电机的某定子槽中心线与转子凸极中心线重合,此时有________。
()
A. 磁阻最大,绕组电感最小;
B. 磁阻最小,绕组电感最大;
C. 磁阻最大,绕组电感最大;
D. 磁阻最小,绕组电感最小
8.SRD系统一般有_________、______________、___________三种控制方式。
9. 为什么开关磁阻电动机调速控制系统适宜采用低速电流斩波、高速角度位置控制的方式?若采用电压PWM控制方式有何优缺点?
10.采用什么硬件电路可以实现精确的角度位置控制?请画出至少一种电路,并说明该电路原理。
11.SRD系统功率变换器所用IGBT主开关,开关信号经DSP产生后,必须经具有________、________及___________功能的专用驱动集成电路,然后再驱动IGBT的通断。
12.采用什么硬件电路可以实现电流斩波?请画出至少一种电路,并说明该电路原理。
13.分析开关磁阻电动机控制中的各种功率变换器类型、适用范围,并说明功率变换器在整个系统中的作用与地位。
14.分析比较开关磁阻电动机与开关磁阻发电机的运行原理。
答案
1.SRD系统一般由电动机、控制器、功率变换器三大部分组成。
2.试分析开关磁阻电动机与步进电动机的异同。
从电机结构及运行原理上看,SR电动机与具有大步进角的反应式步进电动机十分相似,两种电机都是依据“磁阻最小原理”产生转矩。
SR电机可控参数多,控制方法多样,步进电机是通过调节步进脉冲的频率来调速;SR电机常用于力矩拖动控制系统中,而步进电机主要用作信号的传递,即将脉冲信号转换为角位移。
3.比较开关磁阻电动机控制系统与步进电动机驱动系统的异同,各自有何特点?
SRD系统一般为闭环控制,步进电机驱动系统多是开环控制;SRD系统可控参数多,控制方法多样,步进电机是通过调节步进脉冲的频率来调速;SRD系统常用于力矩拖动控制系统中,而步进电机驱动系统主要用作信号的传递,即将脉冲信号转换为角位移。
4.开关磁阻电机相对步进电机等控制电机来说,在应用上,更注重其本身的力能指标。
5.SR电动机在工作中总是遵循磁阻最小原理。
6.当开关磁阻电机的某定、转子的凸极中心线重合,此时有________。
( B )
A. 磁阻最大,绕组电感最小;
B. 磁阻最小,绕组电感最大;
C. 磁阻最大,绕组电感最大;
D. 磁阻最小,绕组电感最小
7.当开关磁阻电机的某定子槽中心线与转子凸极中心线重合,此时有________。
(A )
A. 磁阻最大,绕组电感最小;
B. 磁阻最小,绕组电感最大;
C. 磁阻最大,绕组电感最大;
D. 磁阻最小,绕组电感最小
8.SRD系统一般有电压PWM、电流斩波、角度位置控制三种控制方式。
9.为什么开关磁阻电动机系统适宜采用低速电流斩波、高速角度控制的方式?若采用电压PWM控制方式有何优缺点?
低速或起动时电机的电流相对较大,宜于采取电流控制的方式;高速时电机表现为恒功率特性,电流相对低,角度控制更具有优势;电压PWM控制的方式在低速、高速时均有明显的优点,但也各有缺点,低速时对电流不能很好的把握,实际中要加入限流措施,高速时控制的有效性、精确性不如角度位置控制方式,电压PWM控制的优点也很明显,能对电压进行数字化的精确控制,控制平滑。
10.采用什么硬件电路可以实现精确的角度位置控制?请画出至少一种电路,并说明该电路原理。
角度控制精度越高,则需要的分辨率要求高,可以利用角度细分电路将30°的方波细分,使DSP或主控MCU实现角度控制所需的角度精确定位。
如下图所示。
角度细分电路可以采用数字锁相环CD4046和12进制计数器CD4040,将两路位置传感器信号异或以后的30°方波信号倍频为512个小周期信号(对应0.06°),提高角度控制的分辨率,从而使DSP准确地在导通角θon和θoff处输出相应的相通断信号来实现SR电机的角度控制。
其中,S是两路传感器信号S1、S2异或得到的30°方波信号,ANGLECOUNT是经角度细分(倍频)所得到的信号,送到DSP的TMRCLK端口。
在DSP发生捕获中断时,对TMRCLK端口的信号进行计数,来决定关断角和导通角。
11.SRD系统功率变换器所用IGBT主开关,开关信号经DSP产生后,必须经具有整形、放大及隔离功能的专用驱动集成电路,然后再驱动IGBT的通断。
12.采用什么硬件电路可以实现电流斩波?请画出至少一种电路,并说明该电路原理。
如下图所示。
电路中,IA、IB为绕组电流经过电流-电压变换、隔离放大后的信号。
CD4098是双路单稳态多频振荡触发器,输出的单稳态脉冲的宽度可以外接设置。
其输出的两路信号CHOPIA、CHOPIB与从DSP输出的相通断、PWM信号共同经GAL元件逻辑综合后输出给开关管驱动部分。
13.分析开关磁阻电动机控制中的各种功率变换器类型、适用范围,并说明功率变换器在整
个系统中的作用与地位。
功率变换器主电路即拓扑结构是SR电动机功率变换器设计的关键之一。
围绕处理放电绕组磁场能量问题,已出现多种主电路结构形式,如不对称半桥型、双绕组型、斩波带存储电容型、双极性电源型等。
功率变换器是SR电动机运行时所需能量的供给者,也是电机绕组通断指令的执行者。
SR电动机的功率变换器相当于PWM变频调速异步电动机的变频器一样,在调速系统中占有重要地位,功率变换器设计是提高SRD系统性能价格比的关键之一。
14.分析比较开关磁阻电动机与开关磁阻发电机的运行原理。
开关磁阻电动机运动是由定/转子间气隙磁阻的变化产生的,当定子绕组通电时,产生一个单相磁场,其分布要遵循磁阻最小原则(或磁导最大原则),即磁通总要沿着磁阻最小(磁导最大)的路径闭合,因此,当转子凸极轴线与定子磁极的轴线不重合时,便会有磁阻力作用在转子上并产生转矩使其趋于磁阻最小的位置,即两轴线重合位置,这类似于磁铁吸引铁质物质的现象。
与电动运行时不同,开关磁阻发电机来说,绕组在转子转离“极对极”位置(即电感下降区)时通电励磁,产生的磁阻性电磁转矩趋使电机回到“极对极”位置,但原动机驱动转子克服电磁转矩继续逆时针旋转。
此时电磁转矩与转子运动方向相反,阻碍转子运动,是阻转转矩性质,绕组产生感应电动势发电。
当转子转到下一相的“极对极”位置时,控制器根据新的位置信息向功率变换器发出命令,关断当前相的主开关元件,而导通下一相,则下一相绕组会在转子转离“极对极”位置通电。
这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的阻转转矩,在原动机的拖动下发电。