ATPGpaper D算法和PODEM算法的具体实现过程
atpg原理 -回复

atpg原理-回复ATPG原理及其应用1. 引言在集成电路设计和制造过程中,自动测试模式生成(Automatic Test Pattern Generation,简称ATPG)是一个重要的环节。
ATPG可以根据设计规则检查的设计文件自动生成模拟制造过程中不可达故障(faults)对应的测试模式,并验证设计的正确性。
2. ATPG原理ATPG原理是基于故障模型的。
故障模型是对集成电路故障的数学描述,在故障模型中,一个故障是由一个或多个信号断开或短接导致的。
常用的故障模型有单激励故障模型(Stuck-at Fault Model)和传播路径故障模型(Path Delay Fault Model)等。
2.1 单激励故障模型(SAF)在单激励故障模型中,故障是指一个节点被“固定”在高电平或低电平状态,不受外界输入电平变化的影响。
所以,对于每个节点,都可以定义一个故障模式,即如果节点被固定为高电平,则故障模式为SA1;如果节点被固定为低电平,则故障模式为SA0。
2.2 传播路径故障模型(PDCF)在传播路径故障模型中,故障是指一个路径中的延迟过高(高延迟故障)或延迟过低(低延迟故障)。
该模型通常用来检测时序电路的失效。
3. ATPG流程ATPG流程是一个基于模式生成器的迭代过程。
其大致步骤如下:3.1 初始化首先,需要对电路结构进行初始化,将所有故障置为未检测状态。
3.2 模式生成然后,根据故障模型,生成针对每个故障的测试模式。
模式生成的方法有很多种,如随机模式生成、启发式模式生成和形式化验证模式生成等。
3.3 模式应用将生成的测试模式应用于电路中,通过观察输出信号,确定是否检测到故障。
若检测到故障,则将对应的故障置为已检测状态。
3.4 判断是否完成判断是否已经检测到所有故障。
如果是,则结束流程;如果不是,则返回第3.2步继续生成模式。
4. ATPG应用ATPG在集成电路设计和制造过程中起着非常重要的作用。
p算法,k算法,破圈法,穷举法,ew算法,d算法,bf算法,fw算法的基本原理和应用场合 -回复
p算法,k算法,破圈法,穷举法,ew算法,d算法,bf算法,fw算法的基本原理和应用场合-回复这是一篇关于几种常见算法的基本原理和应用场合的文章,我们将一一回答你提出的问题。
首先,让我们来了解一下最常见的算法之一——穷举法。
穷举法的基本原理是通过遍历所有可能的解空间,从中找到满足条件的解。
它的应用场合包括但不限于密码破解、密码学中的攻击问题、组合问题、排列问题等。
接下来,我们来介绍下破圈法。
破圈法是一种用于解决循环链表中环的问题的算法。
它的基本原理是使用快慢指针来检测链表中是否存在环,如果存在环,则通过慢指针每次向前移动一步,快指针每次向前移动两步的方式,最终两个指针会相遇于环的起点。
因此,破圈法的应用场合主要是解决链表中环的问题,例如判断链表是否有环、找到环的起点等。
下一种算法是ew算法。
ew算法的全称是Exponent Weighted algorithm,是一种加权指数算法。
这个算法的基本原理是通过对历史数据进行加权取值,使得最新数据的权重更高,从而反映最新数据的变化情况。
它的应用场合主要是用于计算带有时间概念的数据的指数平滑移动平均值,例如股票价格的预测、网络流量的预测等。
接下来,让我们来介绍一下d算法。
d算法是一种图搜索算法,用于解决有向图的单源最短路径问题。
它的基本原理是通过迭代更新节点的距离值,直到找到从源节点到目标节点的最短路径为止。
d算法的应用场合包括路由选择、网络优化、数据挖掘等。
接下来,我们来介绍bf算法。
bf算法的全称是Bellman-Ford算法,它是一种用于解决带有负权边的图的单源最短路径问题的算法。
bf算法的基本原理是通过反复松弛边的操作来逐步更新节点的距离值,直到找到从源节点到目标节点的最短路径为止。
bf算法的应用场合主要是解决带有负权边的网络中的路由选择问题,例如计算机网络中的数据包路由等。
最后,让我们来介绍一下fw算法。
fw算法的全称是Floyd-Warshall算法,它是一种用于解决带有负权边的有向图的多源最短路径问题的算法。
EMD分解的流程图如下
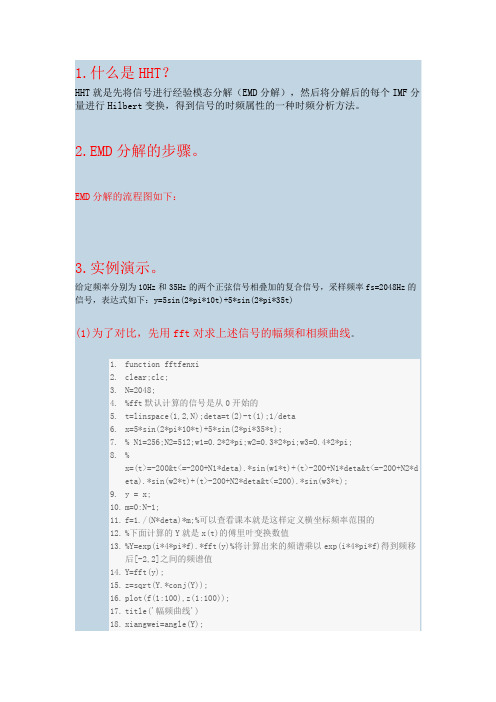
1.什么是HHT?HHT就是先将信号进行经验模态分解(EMD分解),然后将分解后的每个IMF分量进行Hilbert变换,得到信号的时频属性的一种时频分析方法。
2.EMD分解的步骤。
EMD分解的流程图如下:3.实例演示。
给定频率分别为10Hz和35Hz的两个正弦信号相叠加的复合信号,采样频率fs=2048Hz的信号,表达式如下:y=5sin(2*pi*10t)+5*sin(2*pi*35t)(1)为了对比,先用fft对求上述信号的幅频和相频曲线。
1.function fftfenxi2.clear;clc;3.N=2048;4.%fft默认计算的信号是从0开始的5.t=linspace(1,2,N);deta=t(2)-t(1);1/deta6.x=5*sin(2*pi*10*t)+5*sin(2*pi*35*t);7.% N1=256;N2=512;w1=0.2*2*pi;w2=0.3*2*pi;w3=0.4*2*pi;8.%x=(t>=-200&t<=-200+N1*deta).*sin(w1*t)+(t>-200+N1*deta&t<=-200+N2*deta).*sin(w2*t)+(t>-200+N2*deta&t<=200).*sin(w3*t);9.y = x;10.m=0:N-1;11.f=1./(N*deta)*m;%可以查看课本就是这样定义横坐标频率范围的12.%下面计算的Y就是x(t)的傅里叶变换数值13.%Y=exp(i*4*pi*f).*fft(y)%将计算出来的频谱乘以exp(i*4*pi*f)得到频移后[-2,2]之间的频谱值14.Y=fft(y);15.z=sqrt(Y.*conj(Y));16.plot(f(1:100),z(1:100));17.title('幅频曲线')18.xiangwei=angle(Y);19.figure(2)20.plot(f,xiangwei)21.title('相频曲线')22.figure(3)23.plot(t,y,'r')24.%axis([-2,2,0,1.2])25.title('原始信号')复制代码(2)用Hilbert变换直接求该信号的瞬时频率1.clear;clc;clf;2.%假设待分析的函数是z=t^33.N=2048;4.%fft默认计算的信号是从0开始的5.t=linspace(1,2,N);deta=t(2)-t(1);fs=1/deta;6.x=5*sin(2*pi*10*t)+5*sin(2*pi*35*t);7.z=x;8.hx=hilbert(z);9.xr=real(hx);xi=imag(hx);10.%计算瞬时振幅11.sz=sqrt(xr.^2+xi.^2);12.%计算瞬时相位13.sx=angle(hx);14.%计算瞬时频率15.dt=diff(t);16.dx=diff(sx);17.sp=dx./dt;18.plot(t(1:N-1),sp)19.title('瞬时频率')20.复制代码小结:傅里叶变换不能得到瞬时频率,即不能得到某个时刻的频率值。
dpo算法训练流程

DPO(Differentiable Policy Optimization)算法是一种深度强化学习训练方法,通过直接优化策略来提升智能体的表现。
以下是DPO算法的训练流程:
1. 定义环境:定义智能体所在的强化学习环境,包括状态、动作和奖励等要素。
2. 定义策略模型和参考模型,其中策略模型是需要训练的模型,参考模型是给定的预训练模型或人工构建的模型。
3. 对于给定的prompt,计算两个模型对正样本和负样本的概率。
正样本是人类选择的回复,负样本是被拒绝的回复。
4. 通过两个模型概率的差值构建DPO损失函数,惩罚策略模型对正样本概率的下降和负样本概率的上升。
5. 通过最小化DPO损失进行模型训练,不断迭代更新策略,使智能体在环境中获得更高的累积奖励。
6. 在训练过程中,使用DPO损失函数实现安全性约束的模型训练,不需要额外训练一个奖励模型。
7. 整个训练过程只需要策略模型和参考模型两个LLM模型,不需要额外的显存去加载奖励模型。
8. 训练完成后,保存微调后的模型。
以上是DPO算法的训练流程,具体实现细节可能会根据不同的应用场景和需求有所不同。
32主要的组合ATPG算法

2
2 故障D立方 • 在元件E的输出可产生故障信号D(D)的最小输入条
件称为故障D立方. • 其中D表示正常电路输出为1, 故障时输出为0, 记为 D=1/0; D则反之, 记为D=0/1;.
• 如果用表示正常电路的奇异立方, 用表示故障电路 的奇异立方, 则有
D = 1 n 0
D = 0 n 1
D-驱动(); 4. 相容性检查(); 5. 返回 ();
2004-5-25
北京大学微电子学研究院SOC研究所
9
D-驱赶( drive )
while (未试验D-边界上的故障响应) 选择下一个未试验的D-边 界门进行传播; while (未试验的故障响应扇出存在)
选择下一个未试验的故障响应扇出; 生成下一个未试验的传播D-立方; D-交叉选择的立方与测试立方; if (交叉失败或未定义) 继续; if (试验&失败所有传播D-立方) break; if (交叉成功) 增加传播 D-立方到测试立方-- recreate D-边界; 求所有分配的正向&反向蕴涵;
存储 D-边界, 算法规定, 测试立方, 扇出, 故障; break;
else if (交集失败 & 测试立方中的D and D) Backt rack (); else if (交集失败) break;
if (所有故障响应不能传播) Backt rack ();
2004-5-25
北京大学微电子学研究院SOC研究所
30
N
结束
失败
小结
• D-算法 – 第一个完备的ATPG算法
·它采用故障D-立方的概念来激活故障, 利用D驱赶的思
想逐级敏化从故障点到可几端的通路.
2004-5-25
moead算法流程步骤
moead算法流程步骤MOEA/D算法(多目标进化算法基于分解)可是个超有趣的算法呢!一、初始化种群。
这个算法一开始呀,要先创建一个初始种群哦。
就像是召集一群小伙伴来参加一场特别的游戏。
这个种群里的每个个体都像是一个独特的小选手,有着自己的特点。
这些个体的生成通常是随机的,就像在一个大盒子里随机抓取一些小物件一样,每个小物件都代表着一种可能的解。
二、分解多目标问题。
然后呢,它要把多目标问题分解成好多单目标子问题。
这就好比把一个超级复杂的大拼图,拆分成好多小块的拼图。
这样做的好处是,处理起来就没那么头疼啦。
每个子问题都可以单独去研究和解决,就像每个小拼图可以单独去找它该在的位置一样。
三、权重向量生成。
接下来要生成权重向量哦。
这个权重向量就像是每个小选手(个体)的比赛规则一样。
不同的权重向量会引导算法朝着不同的方向去寻找最优解。
它可以帮助算法在多个目标之间找到一个平衡,就像在游戏里,要平衡速度、力量和技巧这些不同的属性一样。
四、邻域关系确定。
再就是确定邻域关系啦。
这就像是在小伙伴们中间建立小团体一样。
每个个体都有自己的邻居,它们之间相互影响、相互交流。
在这个小团体里,大家可以分享信息,互相学习,这样就能让整个种群朝着更好的方向进化。
五、繁殖操作。
然后就到了繁殖操作啦。
这就像是小伙伴们之间互相合作,产生新的小伙伴。
通过交叉和变异这些操作,产生新的个体。
交叉就像是两个小伙伴交换一些特点,变异呢就像是某个小伙伴突然有了一个新的小创意。
六、更新种群。
最后就是更新种群啦。
根据前面那些操作得到的新个体,要看看哪些是比较优秀的,然后把它们留下来,替换掉原来种群里那些不那么好的个体。
就像在比赛中,表现好的选手留下来继续比赛,表现不好的就被淘汰啦。
这样不断地循环,种群就会越来越接近最优解,就像小伙伴们不断成长,变得越来越厉害一样。
P r e d i c t i o n 算 法 使 用

链路预测(Link prediction)中常用的评价指标(evaluation metrics)前提:链路预测只能预测边,不能预测节点。
只预测边!!!论文中提出两种链路预测的评价指标:AUC和精确度(Precision)1、 AUC:AUC指标的具体计算方法:首先我们知道衡量一个算法的好坏,需要把数据集划分为训练集和测试集,如何划分?比如可以删除10%的边(只删除边),那么这10%就是测试集,其余的90%的边和网络的全部节点就为训练集。
那么还有其它的边吗?我想绝大数现实的网络都不是完全图吧,所以肯定有两个节点之间没有连边的情况,那这部分边,我们称之为不存在的边。
一个算法(如CN)经过训练集训练得到网络中每一对节点之间的一个相似值(包括训练集中的边也会得到,测试集的边以及不存在的边显然也会得到)。
AUC指标就是比较测试集中的边的相似值? 与? 不存在的边的相似性的大小。
如果测试集中边的相似值大于不存在边的相似值,就说明效果好啊,+ 1呗;如果测试集中边的相似值等于不存在边的相似值,就说明跟随机选择差不多啊,那就+ 0.5呗,没啥意义,还不如不用算法;如果测试集中边的相似值小于不存在边的相似值,就说明你这算法也太差了吧,随机的都比不过,反其道行之啊兄弟,+ 0吧;那么分母就是测试集中的边与不存在中的边的比较次数,比如测试集中2条边,不存在中3条边,那么比较次数就是6次啦。
2、精确度(Precision)注意:这里提到的精确度和你之前听到的二分类问题的precision、accuracy、recall、F1都毫无关系!!!那么这种精确度怎样计算呢?算法(如CN)不是得到每一个节点对之间的相似值了嘛,这时候去掉训练集中的边,还剩什么了?就剩测试集中的边和不存在的边以及边对应的相似值,按相似值的大小倒序排列这些边。
排序后取前L个(比如给它赋值50,即L=50),看一看这里有几个是测试集中的啊,比如有20个,那么精确度就等于20-50。
dmd方法与pod方法

dmd方法与pod方法DMD方法与POD方法,解析两种数据分析技术。
数据分析在当今社会中扮演着越来越重要的角色,而DMD (Dynamic Mode Decomposition,动态模态分解)和POD(Proper Orthogonal Decomposition,正交分解)方法是两种常用的数据分析技术。
它们可以帮助我们理解复杂的系统行为,从而为决策制定和问题解决提供支持。
本文将介绍这两种方法的基本原理和应用领域。
首先,让我们来了解一下DMD方法。
DMD是一种用于分析动态系统的技术,它可以从时间序列数据中提取动态模态,并用这些模态来描述系统的演化过程。
DMD方法可以应用于多个领域,如流体力学、气象学、生物医学工程等。
通过对系统的动态行为进行分解和分析,DMD方法可以帮助我们理解系统的振荡模式、频率和增长率,从而为系统的预测和控制提供支持。
另一方面,POD方法是一种用于分析空间系统的技术,它可以从空间分布的数据中提取出最重要的模态,并用这些模态来描述系统的变化。
POD方法在流体力学、结构动力学、地质勘探等领域有着广泛的应用。
通过对系统的空间分布进行分解和分析,POD方法可以帮助我们理解系统的主要特征、模态的空间分布以及它们之间的相互作用,从而为系统的优化和设计提供支持。
虽然DMD方法和POD方法在原理和应用领域上有所不同,但它们都是基于对数据进行分解和模态提取的思想。
在实际应用中,可以根据具体问题的特点和数据的性质选择合适的方法进行分析。
此外,还可以将DMD方法和POD方法结合起来,以获取更加全面和深入的系统信息。
总之,DMD方法和POD方法都是重要的数据分析技术,它们为我们理解复杂系统提供了有力的工具和方法。
通过对这两种方法的深入了解和灵活运用,我们可以更好地把握系统的特征和行为,为科学研究和工程实践提供支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ALGORITHMS FOR
PATTERN GENERATION
TOM KIRKLAND Microelectronics and Computer Technology Corp. M. RAY MERCER University of Texas
Three well-known algorithms for the automatic generation of test patterns for digital circuits are the D algorithm, Podem, and Fan. This tutorial introduces the concept of test generation and analyzes the way each algorithm uses search and backtrackingtechniques to sensitize a fault and propagate it to an observable point.
ne task that may be a perfect candidate for automation is test patterngenerationfor combinational digital circuits. Many engineers consider this work more tedious and less rewarding than other aspects of the design process, but they also recognize that it is essential to the quality of the final product. Algorithms for automatic test generation focus primarily on ways to produce tests for combinational circuits.’ Tests for these circuits involve choices from many possibilities, so classical computer search methods are usually the basis for the algorithm. These search techniques use information in the network topology to specify the inputs that form the test pattern. The techniques have become more efficient over time as we have learned more ways to use this information. Three of the best known algorithms for combinational ATPG are the D algorithm;* Podem, short for pathoriented decision making;3and Fan.4 three algorithms All operate only on combinational circuits. Our analysis focuses on the search and control mechanisms of each algorithm. We also look at the heuristics used to guide ATPG search and the notation used to represent circuit values. Fujiwara5and Bottorff‘ give alternative views of the same algorithms.
FAensitize the fault, we must find a pattern o that produces a value of 1 at the output of S for the good circuit. In the faulty circuit,the output of Swill be stuck-at-0(s-a-0),which is different from the good circuit.To set S to 1 in the good circuit, we must set both L and M to 1. The fault is now sensitized, since the good circuit and the faulty circuit have different values at the fault location.
0740-7475/88/0600~43$100s~ 1988
0
June 1988
43
TPG TUTORIAL
GEMERATINC A TEST SET
The obvious reason to test circuits is to separate good ones from faulty ones. Consider the digital circuit in Figure la, which is also represented by the graph in Figure lb. The graph nodes represent circuit devices, or gates, while graph edges represent circuit interconnections, or wires. The inputs to the circuit are called primary inputs. These are the only places we can apply test patterns. The outputs from the circuit are called primary outputs. These are the only places we can observe the effects of the tests. Thus, test patterngeneration is the task of finding a set of input patternsthat will fully test the circuit. These patterns, called the test set, must cause all faulty circuits to exhibit different behavior from good circuits at the primary outputs. A failure is revealed when at least one primary output is different and a failure is present. The test set must be reasonable-that is, we must be able to apply it economically to all circuits produced. Testing that uses all possible input patterns will, of course, revealfaulty circuits but will be too expensive for large circuits with many inputs. For large circuits, the alternativeto exhaustive testing is to start with some simplifying assumptions about the possible failures. First, we assume that only stuck-at faults are failures. This type of fault manifests itself as a node in the circuit, which permanently assumes a value of 0 or 1. If the node’s value is 0, it is called a stuck-at-0 fault; if it is a 1, it is called a stuck-at-1. Second, we assume that only one stuck-at fault is present in a faulty circuit. This singlestuck-at fault model might seem artificialon the
surface, but it has been quite useful in practice. The reason is that if we can detect a large percentage of the single stuck-at faults, we will usually get a test set that detects a correspondingly high percentage of all failures.’ We can also use stuck-at fault models that have been developed for a particular technology with good tracking between predictedand actual results.* To amplify our previous definition of test pattern generation, then, it is the task of generating a test set that reveals all detectablesingle stuckat faults. We say detectablefaults because a circuit can have undetectable faults, also called redundant faults. The test set must consist of binary input patterns that will reveal a difference at the primary outputs. T generate such a test set, we must produce o a differenceat the fault location. This process is called fault sensitizing. We must also propagate this difference to one or more primary outputs. This process is called fault propagation. Consider the circuit in Figure 2a, which we will call a good circuit. If this circuit had a stuck-at-0 fault on the output of gate S, it would be modeled as shown in Figure 2b.