理论力学--第3章解剖
合集下载
理论力学第三章.ppt

MB MB (F ) Fd
2、平面任意力系向作用面内一点简化·主矢和主矩
F1' F1 F2' F2
M1 Mo (F1) M2 Mo (F2 )
Fn' Fn Mn Mo (Fn )
FR Fi Fi
MO Mi MO (Fi )
求: A ,C支座处约束力. 解: 取整体,受力图能否这样画?
取整体,画受力图.
求: A,B处的约束力.
解: 取整体,画受力图.
M A 0 12FBy 10P 6P1 4P2 2P 5F 0
解得
FBy 77.5kN
Fiy 0 FAy FBy 2P P1 P2 0
解得
FAy 72.5kN
取吊车梁,画受力图.
MD 0
求:
DC=CE=CA=CB=2l,R=2r=l, 450,
P, 各构件自重不计.
A,E支座处约束力及BD杆受力.
解: 取整体,画受力图.
ME 0
5
FA
2 2l P l 0 2
பைடு நூலகம்
解得
FA
52 8
P
Fix 0
FEx FA cos 450 0
解得
FEx
Fy 0
M A 0
M M
A B
0 0
各力不得与投影轴垂直 A, B 两点连线不得与各力平行
例3-3 已知: P1 700kN, P2 200kN, 尺寸如图;
求: (1)起重机满载和空载时不翻倒,平衡载重P3;
2、平面任意力系向作用面内一点简化·主矢和主矩
F1' F1 F2' F2
M1 Mo (F1) M2 Mo (F2 )
Fn' Fn Mn Mo (Fn )
FR Fi Fi
MO Mi MO (Fi )
求: A ,C支座处约束力. 解: 取整体,受力图能否这样画?
取整体,画受力图.
求: A,B处的约束力.
解: 取整体,画受力图.
M A 0 12FBy 10P 6P1 4P2 2P 5F 0
解得
FBy 77.5kN
Fiy 0 FAy FBy 2P P1 P2 0
解得
FAy 72.5kN
取吊车梁,画受力图.
MD 0
求:
DC=CE=CA=CB=2l,R=2r=l, 450,
P, 各构件自重不计.
A,E支座处约束力及BD杆受力.
解: 取整体,画受力图.
ME 0
5
FA
2 2l P l 0 2
பைடு நூலகம்
解得
FA
52 8
P
Fix 0
FEx FA cos 450 0
解得
FEx
Fy 0
M A 0
M M
A B
0 0
各力不得与投影轴垂直 A, B 两点连线不得与各力平行
例3-3 已知: P1 700kN, P2 200kN, 尺寸如图;
求: (1)起重机满载和空载时不翻倒,平衡载重P3;
理 论 力 学 教学 课程第3章

上一页 下一页 返回
第一节 平面静定桁架
• 2 .截面法 • 当桁架中的杆件比较多,而只需计算其中某几个杆件的内力时,应用
节点法往往比较麻烦,这时采用截面法。截面法是适当选取一截面, 假想地将桁架截开,选取其中的一部分作为研究对象。作用在这部分 桁架上的外力与被截断杆件的内力构成平面一般力系,应用平面一般 力系的平衡条件,可求解三个未知量。因此,在应用截面法时,一般 截断的未知内力的杆件数应不多于三根。假想截面的形状可任意选择, 既可以是平面,也可以是曲面。
• 所有杆件都在同一平面内的桁架,称为平面桁架。桁架中杆件与杆件 的连接处称为节点,节点的构造通常使用铆接、焊接或螺栓连接等形 式。如图 3-2 所示,由基本三角形结构出发,通过增加杆件延拓而成 的平面桁架称为平面简单桁架,图 3-2 ( a )和( b )分别为屋架 和桥梁结构的平面简单桁架。这种结构是静定的几何不变系统。本节 只讨论平面简单桁架的内力计算问题。
• 二、桁架内力的计算方法
• 计算平面简单桁架的内力有两种方法:节点法和截面法。在求解桁架 内力之前,通常先选取整体为研究对象,求出桁架支座的约束力。
• 1 .节点法 • 节点法求解桁架内力是以桁架的节点为研究对象的。平面桁架的每个
节点都受平面汇交力系的作用,可用平面汇交力系的平衡方程求解。 对于每个节点只能列两个独立的平衡方程,求解两个未知量。因此, 在采用节点法时,选取的节点的未知量应不超过两个。
• Fd=f dFN ( 3-3 ) • 式中: f d 称为动摩擦系数,它与接触物的材料、表面粗糙度及相对
滑动速度等因素有关,其值略小于静摩擦系数,即 f d < f s 。 • 2 .摩擦角与自锁现象 • 1 )摩擦角 • 摩擦角是对静摩擦系数的几何描述。
第一节 平面静定桁架
• 2 .截面法 • 当桁架中的杆件比较多,而只需计算其中某几个杆件的内力时,应用
节点法往往比较麻烦,这时采用截面法。截面法是适当选取一截面, 假想地将桁架截开,选取其中的一部分作为研究对象。作用在这部分 桁架上的外力与被截断杆件的内力构成平面一般力系,应用平面一般 力系的平衡条件,可求解三个未知量。因此,在应用截面法时,一般 截断的未知内力的杆件数应不多于三根。假想截面的形状可任意选择, 既可以是平面,也可以是曲面。
• 所有杆件都在同一平面内的桁架,称为平面桁架。桁架中杆件与杆件 的连接处称为节点,节点的构造通常使用铆接、焊接或螺栓连接等形 式。如图 3-2 所示,由基本三角形结构出发,通过增加杆件延拓而成 的平面桁架称为平面简单桁架,图 3-2 ( a )和( b )分别为屋架 和桥梁结构的平面简单桁架。这种结构是静定的几何不变系统。本节 只讨论平面简单桁架的内力计算问题。
• 二、桁架内力的计算方法
• 计算平面简单桁架的内力有两种方法:节点法和截面法。在求解桁架 内力之前,通常先选取整体为研究对象,求出桁架支座的约束力。
• 1 .节点法 • 节点法求解桁架内力是以桁架的节点为研究对象的。平面桁架的每个
节点都受平面汇交力系的作用,可用平面汇交力系的平衡方程求解。 对于每个节点只能列两个独立的平衡方程,求解两个未知量。因此, 在采用节点法时,选取的节点的未知量应不超过两个。
• Fd=f dFN ( 3-3 ) • 式中: f d 称为动摩擦系数,它与接触物的材料、表面粗糙度及相对
滑动速度等因素有关,其值略小于静摩擦系数,即 f d < f s 。 • 2 .摩擦角与自锁现象 • 1 )摩擦角 • 摩擦角是对静摩擦系数的几何描述。
理论力学第三章刚体力学 ppt课件

正常转动,赝张量的变换多出一个负号。
对于张量,可定义如下运算:
1)相等。
设A和B为两个同阶张量,如果它们的所有分量相等,
即
A ... B ... ,则称它们相等,记为A = B.
2)加法。
两个同阶张量A和B的和定义为 C ...=A ...+B ... 它仍为一个张量,记为 C=A+B
L
a
L
a AL L )(a L
a L
a
B L
L
)
a L aa L a AL L BL L (a a )
a L aa L a ( AL L BL L )
nr nr nr nr
1)转动前: rr 2)转动nr 后:rr nr rr
3)再rr 转动nr rrnr后nr:rr nr rr
不计二阶微量,则有
rr rr nr rr nrrr
交换转动次序,则有
rr rr nrrr nr rr 已知对线位移,有 rr rr rr rr 可得 nr rr nrrr nrrr nr rr
§3.1 刚体运动的分析 §3.2 角速度矢量 §3.3 欧勒角 §3.4 刚体运动方程与平衡方程 §3.5 转动惯量 §3.6 刚体的平动与绕固定轴的转动
§3.7 刚体的平面平行运动 §3.8 刚体绕固定点的运动 §3.9 重刚体绕固定点转动的解 §3.10 拉莫尔进动
§3.1 刚体运动的分析
1. 描写刚体位置的独立变量
将两个矢量Av和Bv按顺序并在一起,不作任何运算
得到的量称为并矢,记为
vv AB
A
B ev ev
理论力学第3章-力偶系

例 3-1 图示机构,各杆自重不计,在两力偶作用下处于平 衡。已知:M1 = 100 N · m,O1A = 40 cm,O2B = 60 cm。 试求力偶矩M2的大小。 B A FB F B FA
30 o
B
O1
B
A FA M2
M1 FO1 O1 A M1
M
2
O2
O2
FO2
解:取O1A杆为研究对象,受力如图所示,
若两个力偶对刚体的作用效应相同,则称这二力 偶等效。
两力偶的等效条件 :力偶矩矢相等,即
M1 M2
(3-2) FR'
B'
证明:
A'
FR F1 FR F'
A B
FR' F1'
F
力偶(FR,FR' ) 代了原力偶(F,F' ) 并与原力偶等效。
A'
FR
FR'
B'
D F' C
比较(F,F')和(FR,FR')可得 M(F,F')=2△ABD=M(FR,FR') =2 △ABC
合力偶矩矢的大小和方向余弦为
M ( M x )2 ( M y )2 ( M z )2 (280)2 1602 (800)2 862.55 kN m
M cos( M , i )
280 0.3246 M 862.55 My 160 cos( M , j ) 0.1855 M 862.55
1 3 200 280kN m 5 5 4 M y M y M 1 y M 2 y 0 200 160kN m 5 2 M z M z M1z M 2 z 400 5 0 800kN m 5 M x M x M1x M 2 x 400 5
理论力学第三章课件
例6:起重机自重 P1=700kN, 作用线过塔
M A (F ) 0 :
FAy–P–Fcos600=0
MA–M–Fql+Fcos600l+Fsin6003l=0 解得:FAx=316.4kN; FAy=300kN
MA=–1188kN.m (与图示转向相反)
Fq FAy FAx MA
静力学/第三章:平面任意力系
■ 平衡方程的其它形式 1 二矩式:
Y 0
FAy FB Fq F 0
1 M 1 FB (3F qa ) 2 a 2
1 M 5 FAy ( F qa ) 2 a 2
静力学/第三章:平面任意力系
例3 :已知有一平面任意力系, 满足 X ≠ 0, Y = 0,
y
b B
A为x轴上的点,B为y轴上的 点,OB=b, 角已知。 求:OA=?
二矩式成立
充分性 即: 二矩式成立
由:
则: 力系不可能合成为合力偶,
只可能合成为合力或平衡。
静力学/第三章:平面任意力系
由 由
又因: X= 0
若有合力,则合 力作用线过A点。
若有合力,则合 力作用线过B点。
B A
x
合 力 作 用 线 过 AB
且 x 轴不与AB连线垂直
故必有:合力为零,即力系平衡。
合 力
合 力 偶 MO = M
O
Mo
作用于O点
静力学/第三章:平面任意力系
2、力系的主矢和主矩
力系的主矢: 对O点的主矩:
M o M o (F )
F FR
■力系主矢的特点: * 对于给定的力系,主矢唯一;
理论力学周衍柏第三章

一、基础知识 1. 力系:作用于刚体上里的集合. 平衡系:使静止刚体不产生任何运动的力系. 等效系:二力系对刚体产生的运动效果相同. 二、公理: 1)二力平衡原理:自由刚体在等大、反向、共线二力作 用下必呈平衡。 2)加减平衡力学原理:任意力系加减平衡体系,不改变原 力系的运动效应。 3)力的可传性原理:力沿作用线滑移,幵不改变其作用 效果,F与F’等效。 注:1)以上公理适用于刚体, 2) 力的作用线不可随便平移
(e) dT Fi dri
(e) 若 Fi dri dV 则 T V E
为辅助方程,可代替上述6个方程中任何一个
§3.5 转动惯量
一、刚体的动量矩 1. 某时刻刚体绕瞬轴OO’转动,则pi点的速度为
vi rii
动量矩为 2. 坐标表示
R Fi Fi 0 M M i ri Fi 0
2. 几种特例 1)汇交力系(力的作用线汇交于一点):取汇交点为 简化中心,则
Fix 0 R Fi 0 Fiy 0 Fiz 0
三、力偶力偶矩 1. 力偶:等大、反向、不共线的两个力组成的利系。
力 偶 所在平面角力偶面. 2. 力偶矩: 对任意一点O M rA F rB F (rA rB ) F r F M Fd
方向 : 右手法则 上式表明:
J z x mi zi xi y mi zi yi z mi ( xi2 yi2 )
I yy mi ( zi2 源自xi2 ) I zy mi zi yi I yz mi yi zi I xz mi xi zi
I zz mi ( xi2 yi2 )
(e) dT Fi dri
(e) 若 Fi dri dV 则 T V E
为辅助方程,可代替上述6个方程中任何一个
§3.5 转动惯量
一、刚体的动量矩 1. 某时刻刚体绕瞬轴OO’转动,则pi点的速度为
vi rii
动量矩为 2. 坐标表示
R Fi Fi 0 M M i ri Fi 0
2. 几种特例 1)汇交力系(力的作用线汇交于一点):取汇交点为 简化中心,则
Fix 0 R Fi 0 Fiy 0 Fiz 0
三、力偶力偶矩 1. 力偶:等大、反向、不共线的两个力组成的利系。
力 偶 所在平面角力偶面. 2. 力偶矩: 对任意一点O M rA F rB F (rA rB ) F r F M Fd
方向 : 右手法则 上式表明:
J z x mi zi xi y mi zi yi z mi ( xi2 yi2 )
I yy mi ( zi2 源自xi2 ) I zy mi zi yi I yz mi yi zi I xz mi xi zi
I zz mi ( xi2 yi2 )
理论力学课件 受力分析与受力图、第三章
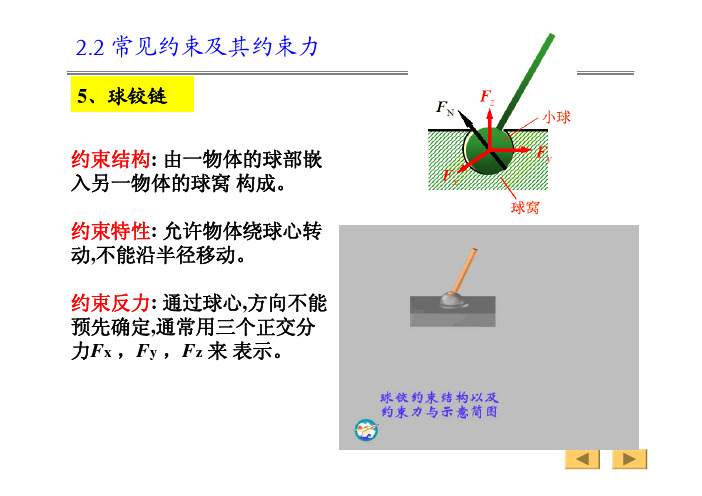
5、球铰链
约束结构: 由一物体的球部嵌入另一物体的球窝构成。
约束特性: 允许物体绕球心转动,不能沿半径移动。
约束反力: 通过球心,方向不能预先确定,通常用三个正交分力F x,F y,F z来表示。
人造髋关节
二力杆工程实例
固定端约束除了加约束力,还要加上约束力偶。
运动学角度:固定端既限制线位移,又限制角位移,如果只有约束力,则构件将转动。
必须有约束力偶才行。
力系简化角度:固定端所受的力是一个复杂的平面任意力系,力系向端部某点简化的结果是一力和一力偶。
CD是不是二力
杆?
2.3 受力分析与受力图
刚化原理:若变形体在某一力系作用下处于平衡,则将此变形体刚化为刚体,其平衡状态保持不变。
只有刚化原理没有软化原理。
1. 右拱BC 的受力图。
C
B
解:
F C
F B
2. 左拱AC 的受力图。
A C
F
F Ax C F
F Ay。
理论力学-第3章
M Oy M Oy Fi 0
略去所有表达式中的下标 i ,空间任意力系平
F F F
x y
0 0 0
z
M F 0 M F 0 M F 0
x y z
任意力系的平衡方程
平衡方程的一般形式
F F F
x y
0 0 0
平衡方程的一般形式
对于作用在刚体或刚体系统上的任意力系,平
衡条件的投影形式为
z
F2 M2
FRx Fix 0 FRz Fiz 0
FRy Fiy 0
M Ox M Ox Fi 0 M Oz M Oz Fi 0
F1
M1
O y
Mn
l
l
A C
第三种情形
l
B
FP
D
平衡方程的应用
例 题 1
图示结构 ,若 FP 和 l 已知,确定四种情形下的约束力
l
l
A C
第三种情形
l
B
FP
D
FA
l
A C B
l
FP
D
l
FCx
FCy
平衡方程的应用
例 题 1
图示结构 ,若 FP 和 l 已知,确定四种情形下的约束力 MA ( F ) = 0 :
平衡方程的应用
例 题 1
图示结构 ,若 FP 和 l 已知,确定四种情形 下的约束力
l
l
B D
FP
FAy FAx A
l
A C
l
d C
B FBC
l
FP
D
第一种情形
l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FR Fi 0 (3-9)
由式(3-8)知,为使合力为零必须同时满足
X Yi
i
0 0
Zi 0
(3-10)
空间汇交力系的 平衡方程
结论: 空间汇交力系平衡的必要与充分条件为:该力系中所有各
力在三个坐标轴上的投影的代数和分别等于零。
例3.4
已知: CE EB DE a 30 EBF 30
实际工程中,绝大多数结构所受力系中 各力的作用线往往不是分布在同一平面内的, 而是在空间范围内任意分布,这样的力系称 为空间力系。空间力系是最一般的力系。本 章将研究空间力系的简化和平衡问题。
空间力系实例
§3-1 空间汇交力系
1.力在直角坐标轴上的投影
z
ZF
g ob
X aY
x
图3.1
X F cosa
解:X=3,Y=4,Z=-5
F (X )2 (Y )2 (Z)2 5 2kN cos(F,i) X 3 0.4243
F 52 cos(F, j) Y 4 0.5657
F 52 cos(F,k) Z 5 0.7071
F 52
(F, i) a 64.9 (F, j) b 5555' (F, k) g 135
P 10kN 试求起重杆所受的压力和绳子的拉力。
解: 取起重杆AB与重物为研究对象,受力分析和选取 坐标轴如图所示,列平衡方程如下:
X 0 F1 sin 45 F2 sin 45 0
Y 0 FA sin 30 F1 cos 45 cos30 F2 cos 45 cos30 0
Z 0 F1 cos 45sin 30 F2 cos 45sin 30 FA cos30 P 0
X 1 2 0 2 5kN Y 10 15 5 10 30kN
Z 3 4 1 2 6kN
代入(3-8)式得合力的大小为:
FR ( X i )2 ( Yi )2 ( Zi )2 52 302 62 31kN
合力的方向:
cos(FR ,i)
Xi 5 FR 31
cos(FR , j)
Yi 30 F R 31
cos(FR ,k)
Zi 6 FR 31
(F , i) a 8043' (F , j) b 1436' (F, k) g 7850'
由于一般空间汇交力系合成为一合力,因此空间汇交 力系平衡的必要与充分条件是:该力系的合力等于零,即
解得
F1 F2 3.54 kN
FA 8.66 kN
§3.2 力对点之矩和力对轴之矩
力对点之矩实例
F
力对点之矩的定义
M0(F) r F 大小:
M O (F ) = r ×F = F • h = 2 AΔOAB
矩矢方向:按右手螺旋法则确定 方位:沿力矩作用面的法线方向
r xi yj zk F Xi Yj Zk
力矩矢MO(F) 的始 端必须在矩心,为
M0(F) r F
定位矢量
i jk
x y z (Zy Yz)i (Xz Zx) j (Yx Xy)k
XYZ
力矩矢量的方向
MO
F
按右手定则
r
M= r×F
力对点之矩几点结论
❖ 力对点之矩是定位矢量,矢量作用在O点,垂直于r 和F 所确定的平面。
C
D
X3 1500cos cos 805N Y3 1500cos sin 1073N Z3 1500sin 671N
X 2 1000 sin 60 866 N , Y2 1000 cos 60 500 N , Z 2 1000 cos90 0N
例3.2已知力沿直角坐标轴的解析式为F=3i+4j -5k(kN), 试 求这个力的大小和方向。
y
Y F cosb (3-1)
Z F cosg
一次(直接)投影法
二次(间接)投影法
z
ZF
g
o
X
x
Y
y
Fxy
图3.2
X F sing cos
Y F sin g sin (3-2) Z F cosg
应该注意:力在轴上的投影是代数量, 而力在平面上的投影是矢量。
力沿直角坐标轴的分解
z
Fz F
k
o
Fx i
j
Fy y
x
图3.3
F Fx Fy Fz Xi Yj Zk (3-3)
力F在坐标轴上的投影和力F沿坐标轴的
正交分量间的关系为:
Fx Xi
Fy Yj
Fz Zk (3-4)
若已知力F在坐标轴上的投影X、Y、Z,则该力的大小及方向为
F X2 Y2 Z2
cosa X cosb Y
F
F
cosg Z
F
(3-5)
例 3.1 长 方 体 上 作 用 有 三 个 力 , F1=500N, F2=1000N, F3=1500N,方向及尺寸如图所示,求各力在坐标轴上的投影。
解 力F1及F2应用直接投影法,力F3用二次投影法
X1 500cos90 0, Y1 500cos90 0, Z1 500cos180 500N
力对轴之矩是代数量,其正负号由右手螺旋法则确定
力对轴之矩的计算
方法一 : 将力向垂直于该轴的平 面投影 ,力的投影与投影至轴的 垂直距离的乘积。
❖矢量的模即为力对点之矩的大小 M0 (F ) = r ×F = Fh
❖矢量方向由右手螺旋法则确定。
力对轴之矩实例
Fz Fy
Fx
力对轴之矩的定义
力对轴之矩是力使物体绕某一轴转动效应的量度,是一个 代数量,其绝对值等于该力在垂直于该轴的平面上的投影对 这个平面与该轴的交点的矩。
M z (F ) = Mo (Fxy ) = ±Fxyh = ±2 AΔOab
2.空间汇交力系的合成与平衡条件
若某汇交力系由几个力组成,则合力等于各分力的矢量和,
合力的作用线通过汇交点。合力矢为:
FR F1 F2 Fn Fi
由式(3-3)可得
(3-6)
FR ( Xi )i ( Yi ) j ( Zi )k
(3-7)
由此可得合力的大小和方向余弦:
FR ( Xi )2 (Yi )2 ( Zi )2
(3-8)
cos(FR
,
i)
Xi FR
cos(FR ,
j)
Yi FR
cos(FR , k)
Zi FR
例3.3:在刚体上作用有四个汇交力,它们在坐标轴上的 投影如下表所示,试求这四个力的合力的大小和方向。
F1
F2
F3
F4 单位
X
1
2
0
2
kN
Y 10
15
-5
10 kN
Z
3
4
1
-2 kN
解:由上表得