三角高程网高程平差结果
工程测量中三角高程测量的误差分析及解决方法
应 用 科 技
Hale Waihona Puke 工程测量中三角高程测量的误差分析及解决方法
戚 忠
( 中国水利水 电第四工程局有 限公 司测绘 中心, 青海 西宁 8 1 0 0 0 7 )
摘 要: 通过 对 三 角 高程 测量 公式 的 分析 , 发 现影 响 三 角 高程测 量 精度 的 因子 , 引进 当下较 为 先进 的设备 与方 法 , 从 而提 高三 角 高程 测 量 的精 度 , 使 其 可 以替 代 几何 水 准测 量 。该 方法 的 实现 可 以 弥补 几何 水 准 受地 形 条件 等 因素 限 制使 工 作 效 率慢 , 测 绘 成 本高 , 人 身、 设 备 安全 无 法保 障等 缺 点 。 关键词: 三 角高程 测 量 ; 几何水准; 误 差 分析 ; 大 气折 光 系数 间观 测对 高 程测 量 不利 , 可 以通 过 加 入大 气 折 光误 差计 算 减 弱 三角 高程 测 量误 差 。 3 - 4 采用 同时对 向观 测 。在 控制 网观测 中 , 由于 投 入 的人 员 、 仪 器、 觇标 数量 和 观测 时 间 的原 因 , 采 用 同时 对 向观 测会 耗 时耗 力 。 且 由于 折 光影 响 , 不 同时 间段 对 向观 测 , 往、 返 测 高差 较差 大 多 都 超 出 规范 限 差要 求 。 3 . 5 确定 合 适 的 大气 折 光 系数 。前 面讲 过 , 在 各 种 不 同 的 情况 下, 大气 折光 系 数都 可 能有 很 大 的差异 。 也 就是 说 , 大气 折光 系 数值 是一 个 变值 , 随时 随地都 在 变化 。 我 国经 过 几个 地 区 的统计 资 料 , 大 气折光 系数一般在 0 . 0 9 — 0 . 1 6之间, 而且 , 其变化也是很复杂 的, 因 低 了测 量 成本 。 而完 全 准确 的掌握 其 变化 规 律将 比较 困难 , 只 能根 据 实 验资 料 概 括 2_ 一角 高 程测 量误 差 分 析 出其 一 般规 律 。 常见 的 二 三 角 高程 测 量有 单 向 观测 法 、中间 法 和对 象 观测 法 , 对 4 大气 折光 系数 的测 量方 法 向观测 法 可 以消 除部 分 误差 ,故 在 j 角高 程 测 量 中采 用较 为广 泛 。 由于大气折光系变化的复杂性 , 使我们不可能精确地确定每一 对 向 观测 法 三角 高程 测 量 的高 差公 式 为 : 方 向 的折 光 系数 。 因此 , 在 实际 作业 中 , 应设 法 精确 的测 定 某一 区 域 内的平 均 折光 系 数 , 用 以计算 各 个 单项 观 测 高差 。大气 折光 系数 虽 + 盟 ( 一 U D( 1 ) 然变化无 常, 但可以经过一段时间的观测找 出它的变化规律 , 确定 式 中: D 为两 点 问 的距离 ; a为垂 直 角; ( k : - k O 为 往返 测 大 气垂 直 适合观测时间段的大气折光系数 。 折光 系数差 ; i 为仪器高 ; v 为 目标高 ; R为地球 曲率半径( 6 3 7 0 k m ) ; 大气 折光 系 数可 以通 过 2种 方法 得 到 : ( 1 )在 已知 高差 的两 点 间单 向观测 垂 直 角 、 斜距 , 求 解 大 气折 光 系 数 ; ( 2 ) 根 据 两 点 间 同 时 ( _ U l 一 U J 为 垂线 偏 差非 线性 变 化量 ; 对 向 观测 的垂 直 角和 斜距 , 求 解 大气 折 光 系数 。采用 两 种 办法 求 解 令 : 一k l =△ k ,生 一 A U , - ‰: m- 并 进行 对 比。确 定折 光 系数 时应 注 意 控制 网测 区一 般 相对 较 小 , 可 对式( 1 ) 微分 , 则 由误 差 传播 定 律 可得 高差 中误 差 : 以作 为一 个 测 区来计 算确 定 大气 折 光 系数 。 但 有 的地 区 由于 某些 特 殊 的情况 原 因 , 计 算 的大 气 折光 系数 互 差较 大时 , 就需要分测p ( 来 m i 进 。 分别 计算 大 气折 光 系数 。 5结 束语 : : 一 ) 。 在工程测量 中利用三角高差测量替代高等级几何水准测量 , 提 由式 f 2 ) 可 知 影 响 三 角 高 程 测 量 精度 主要 有 : 1 . 竖直角 ( 或 天 顶 高三角高程测量等级 , 使测量控制的三维坐标精度一致 , 减少高等 距) 、 2 . 距离 、 3 . 仪器 高 、 4 . 目标 高 、 5 . 球 气 差 。第 l 、 2项 可 以通 过 试 验 级几何水准测量劳动强度 , 降低测量成本 , 提高测量速度和效益。 但 观测 数 据分 析 选择 精 度合 适 的仪 器 及其 配 套 的反 光 棱 镜 、温度 计 、 该方 法也 有 一些 需要 改 进 的部 分 , 我们 在 实践 过 程 中总结 了以下 几 气 压表 等 , 我 们 选择 的是 徕 卡 T C A 2 0 0 3 及 其 配 套 的单 棱 镜 、 国产 机 点 , 希望 能 给大 家 以借 鉴 , 使 得 该技 术 在应 用过 程 更加 方便 、 可靠。 械通 J x 【 f湿温 度计 、 盒式 气 压计 ; 第 3 、 4 项, 一 般 要 求建 立 稳定 的观 5 . 1跨河 ( 或障碍物) 任意设站三角高程测量时 , 测量前需对棱 测 墩 和强 制 对 中装 置 , 采 用 游标 卡 尺 在 基座 3个 方 向 量 取 , 使 3个 镜 、 对 中杆进 行 校测 。 方 向 量取 的校 差小 于 0 . 2 m m, 并 在测 前 、 测 后进 行 2次量 测 ; 第 5项 5 . 2 任 意 设 站 三 角程 测 量 , 尽 量 缩 短前 、 后 视 距 离 及 其距 离 之 球气 差 也 就是 大 气折 光差 , 也 是 本课 题 的研 究 重点 。 差; 影 响 三角 高程 测 量 精度 的因 素很 多 , 容 易产 生 粗 差 , 应 进 行 多 次 3 减弱 大 气折 光差 的方 法和 措施 测量 ; 组于组之间变换仪器高时 , 需在不同位置进行 ; 交换棱镜 时 , 大气 折 光 差 : 是 电 磁 波经 过 大 气 层 时 , 由于传 播 路 径 产 生 弯 曲 特别 注意 棱 镜 头不 能从 对 中杆 上取 下 , 此 时 不 必 量取 仪 器 高 、 棱镜 及 传播 速 度发 生 变化 而 引起 观测 方 向或 距 离 的误 差 。 大气 折 光对 距 高 ,往 返 高差 不 进行 对 比 ;组 于组 之 间 高 差互 比应 满 足 ≤± 4的要 离的影响 , 表 现在 电磁 波 测 距 中影 响 的量 值相 对 较 大 , 必 须 在 测 距 求 。 的同 时实 测 测线 上 的气 象元 素 , 再 用 大气 折 光模 型 对距 离 观 测值 进 5 . 3 山 区天 气 突 变 时 候 多 , 天气突变时应停止观测 , 待 天气 稳 行 改 正 。减 弱 大气 折 光差 的方 法和 措 施有 : a . 提 高 观 测视 线 高 度 ; b . 定 时重 新进 行 观测 。 尽 量 选择 短 边传 递高 程 ; c . 选 择有 利 观 测 时 间 ; d . 采用 同时 对 向观 5 . 4折光差测定时 , 应在测区不同高程面上均匀测定 , 如 发 现 测; e . 确 定 合适 的 大气 折光 系 数 。 上述 的 5 种 办法 虽 然都 可 以减 弱大 异 常 , 应在 同 边不 同 的气 象条 件下 多 次进 行测 定 对 比 。 气 折 光对 三角高 程测 量 精 度 的影 响 , 但 在 实 际 工作 中也有 很 多 制约 作者 简 介 : 戚 忠( 1 9 8 6 一 ) , 男, 汉族 , 青海省西宁市, 中 国水 利 水 闪素。下面具体分析 。 电第 四 工程 局 有 限公 司测绘 中心 , 助理 工 程 师 , 本科 , 工程 测 量 \ 地 3 . 1提高观测视线高度 。由于工地地形条件限制 、 抬高视线高 理信 息 系统 度需要造高标增大测量成本 、由于标墩高大影响其它工程施工 , 提 高观 测视 线 高度 的方法 不 可取 。 3 . 2 尽量 选 择 短边 传递 高程 。由三 角高 程测 量 高差 计算 公 式 可 知, 折光 的影 响与距 离 的平 方 成 比例 , 选择 短边 传 递 高程 有利 。 但 控 制 网的边 长 是 由多 种 因素 控制 的 , 不能 随 意增 加 和减 少 。 3 . 3 选择 有 利观 测 时 问 。 中午前 后 ( 1 0 ~ 1 5时 ) 垂直 折 光小 , 观测 垂直角最有利。 日出 l 小时后至上午 1 0点、下午 1 5点至 日 落前 1 小 时水 平折 光 小 , 利于 水 平方 向角 度 观测 。 控制 网观测 是水 平 、 垂 直 方 向角 度 同时 观测 , 不 能 兼顾 。 根据 现 场施 工情 况 , 采 用上 午 9 — 1 1 . 5 时、 下午 1 4 ~ l 7 . 5时 进行 观 测 ( 1 2 点 是 施工 放 炮 时 间 ) 。虽 然此 段 时
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
南方平差易水准网平差实例.
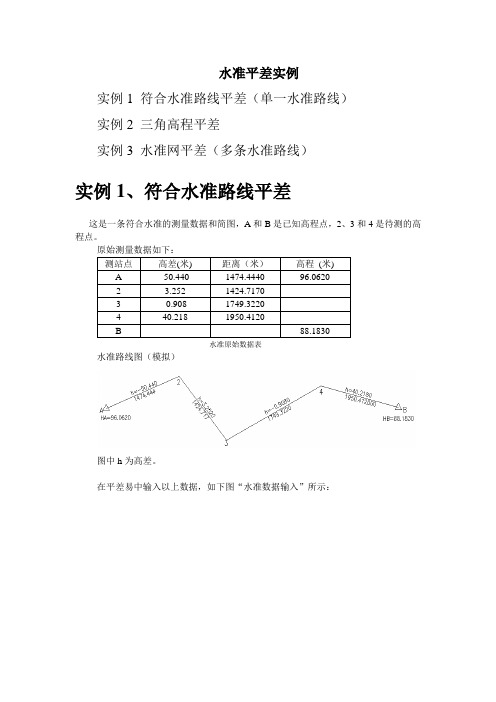
水准平差实例实例1 符合水准路线平差(单一水准路线)实例2 三角高程平差实例3 水准网平差(多条水准路线)实例1、符合水准路线平差这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
测站点高差(米) 距离(米)高程(米)A -50.440 1474.4440 96.06202 3.252 1424.71703 -0.908 1749.32204 40.218 1950.4120B 88.1830水准原始数据表水准路线图(模拟)图中h为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:水准数据输入在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。
因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:选择格式注意:1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示:A->2观测数据测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:2->3观测数据测段3号点至4号点的观测数据输入如下图“3->4观测数据”所示:3->4观测数据测段4号点至B点的观测数据输入如下图“4->B观测数据”所示:4->B观测数据以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A):[STATION]A,01,,,96.062000B,01,,,88.1830002,003,004,00[OBSER]A,2,,1474.444000,-50.44002,3,,1424.717000,3.25203,4,,1749.322000,-0.90804,B,,1950.412000,40.2180平差计算选择菜单“平差->闭合差计算”,计算该水准路线的高差闭合差。
四等三角高程指标差

四等三角高程指标差摘要:一、四等三角高程指标差概述二、四等三角高程指标差的应用1.测量基本方法2.测量结果的计算与分析3.误差控制与处理三、四等三角高程指标差在我国高程测量中的重要性四、发展趋势与展望正文:一、四等三角高程指标差概述四等三角高程指标差是指在我国高程测量中,采用三角测量方法所得到的高程误差。
四等三角高程测量是我国高程测量体系中的一个重要环节,其成果广泛应用于地形测绘、工程测量、地质灾害监测等领域。
四等三角高程指标差的精度直接影响着后续工程的设计和实施。
二、四等三角高程指标差的应用1.测量基本方法四等三角高程测量采用的基本方法包括:几何法、空中三角测量法、卫星遥感测量法等。
几何法是通过地面观测点和已知高程点之间的角度、距离等关系,计算待测点的高程;空中三角测量法是通过航空影像、卫星遥感影像等获取地面特征点,然后通过立体观测计算高程;卫星遥感测量法是通过卫星传感器获取地表高程信息。
2.测量结果的计算与分析在四等三角高程测量中,测量结果的计算与分析是关键环节。
首先,对观测数据进行预处理,包括数据筛选、粗差剔除等;然后,采用最小二乘法、卡尔曼滤波等方法进行高程计算;最后,对计算结果进行精度分析,评估四等三角高程指标差是否满足要求。
3.误差控制与处理为了保证四等三角高程测量成果的精度,误差控制与处理至关重要。
主要包括以下几个方面:(1)观测误差控制:采用高精度仪器、优化观测方案、严格遵循观测规程等方法,降低观测误差。
(2)气象误差控制:观测过程中,尽量选择稳定气象条件,减少气象误差对测量结果的影响。
(3)仪器校准:定期对测量仪器进行校准,确保仪器精度的稳定性。
(4)数据处理:采用合理的平差方法,对观测数据进行最小二乘法处理,提高测量结果的精度。
三、四等三角高程指标差在我国高程测量中的重要性四等三角高程指标差在我国高程测量中具有重要作用,其成果为各类工程项目提供了准确的高程基准,确保了工程设计的合理性和实施的科学性。
工程测量中三角高程测量误差分析及解决方法

工程测量中三角高程测量的误差分析及解决方法戚忠中国水利水电第四工程局有限公司测绘中心,青海西宁,邮编810007一引言一直以来,为保证精度,高等级高程测量都采用几何水准的方法。
而在某些特定环境下,几何水准往往会耗费大量的人力、物力,且受地形等条件因素影响较大!鉴于几何水准在某些特定情形下无法进行的问题,探讨如何提高三角高程测量的精度,以保证其测量成果的可行性和可靠性,使得三角高程测量成果足以替代几何水准。
随着高精度全站仪的问世,结合合理的方式、方法,运用三角高程替代几何水准测量是切实可行的。
三角高程代替几何水准可以解决跨河水准及高边坡、危险地段无法进行精密几何水准测量的难题,保障危险地段测量人员和仪器设备的安全,提高了工作效率,降低了测量成本。
二三角高程测量误差分析常见的三角高程测量有单向观测法、中间法和对象观测法,对向观测法可以消除部分误差,故在三角高程测量中采用较为广泛。
对向观测法三角高程测量的高差公式为:(1)式中:D为两点问的距离;a为垂直角;为往返测大气垂直折光系数差;i为仪器高;v为目标高; R为地球曲率半径(6370 km);为垂线偏差非线性变化量;令。
对式(1)微分,则由误差传播定律可得高差中误差:(2) 由式(2)可知影响三角高程测量精度主要有:1.竖直角(或天顶距)、2.距离、3.仪器高、4.目标高、5.球气差。
第1、2项可以通过试验观测数据分析选择精度合适的仪器及其配套的反光棱镜、温度计、气压表等,我们选择的是徕卡TCA2003及其配套的单棱镜、国产机械通风干湿温度计、盒式气压计;第3、4项,一般要求建立稳定的观测墩和强制对中装置,采用游标卡尺在基座3个方向量取,使3个方向量取的校差小于0.2 mm,并在测前、测后进行2次量测;第5项球气差也就是大气折光差,也是本课题的研究重点。
三减弱大气折光差的方法和措施大气折光差:是电磁波经过大气层时,由于传播路径产生弯曲及传播速度发生变化而引起观测方向或距离的误差。
CPⅢ高程网测量方法及其数据处理

CPⅢ高程网测量方法及其数据处理摘要简单介绍铁路客运专线建设CPⅢ高程控制网测量及平差方法关键词CPⅢ高程控制网测量德国中视法观测平差方法1 前言目前国内铁路客运专线建设中CPⅢ高程控制网测量方法主要包括德国中视法、中国矩形法和三角高程法。
德国中视法是一种水准测量方法,其特点是测量精度高,测量原理及方法明晰,本文就德国中视法测量方法及数据平差处理做具体介绍。
2测量方法德国中视法采用水准测量往返观测的方法进行,往测时以线路一侧(图2-1下方)的CPⅢ点为主线进行水准测量,而另一侧的CPⅢ点(图2-1上方)在进行水准测量时作为中视进行观测,其往测水准路线如图2-1所示。
返测时以另一侧的CPⅢ点为主线进行水准测量,而对侧的CPⅢ点在进行水准测量时也是作为中视进行观测,返测水准路线如图2-2所示。
CPⅢ点与线路水准基点每两公里应联测一次,联测线路水准基点时也应按照往返测的方法进行。
从图2-1和图2-2中可以看出,任何一段CPⅢ高程网均由两条附合路线组成,这两条附合路线均起闭于CPⅢ高程网线路两端的二等水准基点上。
图2-1 德国中视法往测路线示意图图2-2 德国中视法返测路线示意图3数据处理采用电子水准仪(天宝DINI12)完成一测段德国中视法测量后获得如图3-1a和图3-1b的数据。
其中Rb为后视,Rf为前视,HD为视距,Z为高程。
完成往返测量后,构成如图3-2的高差闭合环。
图3-1a 测量高程控制点与CPⅢ控制点高差观测数据图3-1b 第一测站和第二测站数据图3-2 德国中视法高差闭合环示意图3.1 平差方法经典平差方法包括:条件平差、间接平差、附有参数的条件平差、附有限制条件的间接平差和附有限制条件的条件平差五种平差方法。
基于德国中视法的高差闭合环网形和利于计算机处理,德国中视法平差模型选择间接平差模型。
选取待定点的高程作为未知参数,搜索闭合环网形中与已知点发生联系的待定点,计算出此待定点的高程值并将其作为新的已知点,循环搜索直到所有待定点的高程都被解算出来,从而完成所有待定点近似高程的推算。
3-2 高程网条件平差

§3-2 高程网条件平差0.5学时高程网包括水准网和三角高程网。
对高程网进行条件平差时,一般以已知高程点的高程值作为起算数据,以各测段的观测高差值作为独立观测值,写出其满足的条件关系式,按照条件平差的原理解算各高差值的改正数和平差值,然后再计算出各待求点的高程平差值,并进行精度评定。
一、高程网条件方程的个数及条件方程式进行条件平差时,首先要确定条件方程的个数。
从上节内容可知道,在一般情况下,条件方程式的个数与多余观测的个数r相符。
而要确定多余观测个数就必须先确定必要观测个数t。
高程测量(包括三角高程测量和水准测量)的主要目的是确定未知点的高程值。
如图3-2所示高程网中,有2个已知高程点A、B,3个未知高程点C、D、E和8个高差观测值。
从图中可以看出,要确定3个未知点的高程值,至少需要知道其中的3个高差观测值(如h1、h2、h3,或h6、h7、h8,或h2、h4、h5等多种选择),即必要观测个数t = 3。
图3-2 则多余观测个数r = n – t = 8 - 3 = 5,可以写出这5个条件方程式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-++=+-=-+=+-=--0ˆˆ0ˆˆ ˆ0ˆˆˆ0 ˆˆˆ 0ˆˆˆ72875764532421B A H H h h h h h h h h h h h h h h相对应的改正数条件方程式形式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-+=-+-=--+=-+-=--+00 0005724875376425321421w v v w v v v w v v v w v v v w v v v其中⎪⎪⎪⎭⎪⎪⎪⎬⎫-++-=+--=-+-=+--=---=)()()()()(7258754764353224211B A H H h h w h h h w h h h w h h h w h h h w这些条件方程式(或改正数条件方程式),大体上分为两类:其一是闭合路线情况,如条件方程式中前四个条件方程式,可称为闭合条件方程式;其二是附合路线情况,如条件方程式中第五个,反应的是从A 点出发后测得的B 点的高程值是否与B 点的已知高程值相等的问题,可称为附合条件方程式。
三角高程 高差 权值
三角高程高差权值
三角高程、高差和权值是地理测量和地理信息系统中常用的概念。
三角高程是指利用三角测量方法测定地表点的高程。
三角测量是一种通过测量三角形的边长和角度来确定地表点位置和高程的方法。
这种方法可以通过测量基线长度和方向,以及相邻三角形之间的角度来计算地表点的高程。
高差是指在地理测量中用来表示两个点之间垂直距离的概念。
高差可以通过测量两个点的高程来计算得出,通常使用水准仪或全站仪等仪器进行测量。
高差的准确度对于工程测量和地形测量非常重要,因为它直接影响到工程设计和地形分析的结果。
权值在地理信息系统中是用来表示数据质量和可信度的参数。
在地理数据分析和空间建模中,不同的数据层具有不同的权值,这些权值可以用来调整数据在分析过程中的影响力。
例如,在地形分析中,数字高程模型的精度可以通过权值来表示,以便在地形建模和分析中得到更准确的结果。
综上所述,三角高程、高差和权值是地理测量和地理信息系统中非常重要的概念,它们在地理数据采集、分析和建模过程中起着
关键作用。
通过对这些概念的深入理解和合理运用,可以提高地理信息数据的质量和可信度,从而更好地支持地理空间分析和决策。