三角高程路线高差计算表
电磁波测距三角高程测量

6.4.1 解算原理和计算公式
3、由电磁波实测斜距和单向垂直角计算两点间高差 、
h12 = S sin α12 + I1 V2 + CS 2 cos 2 α12 NC = S sin α12
若顾及ε角,用正弦定理计算:
ε2 S sin α12 NC = = S sin α12 (1 + ) sin(90 + ε ) 2 δh = S sin α12 ε2
2 S 02 (1 + tg 2 β ) + 2tgβ (m n + p ) S 0 + (m n + p ) 2 S12 = 0
6.4.1 解算原理和计算公式
解得,平距为:
S0 =
2 S12 (1 + tg 2 β ) (m n + p ) 2 tgβ (m n + p ) 1 + tg 2 β
2
该公式误差很小。
S = 10km, α12 = 30 , 求得:δh = 0.0006m S = 10km, α12 = 50 , 求得:δh = 0.0010m
6.4.1 解算原理和计算公式
PC = S cos α12
ε2 ε2 S sin(90 α12 ε ) PC = = S[cos α12 (1 ) ε sin α12 ](1 + ) sin(90 + ε ) 2 2 = S cos α12 Sε sin α12 δS = Sε sin α12
ε2
2
= P C tgα12 (1 + tgα12ε +
ε2
2
) = P C tgα12 + δh
近似公式引入的误差为: δh = P C tgα12 (tgα12ε + 当 PC = 10km, α12 = 30 , 求得:δh = 0.043m
高速铁路CPⅢ三角高程网构网与平差计算方法
为克 服高 速铁路 C 1控 制 网将平 面 和高 程数 P1 I
据分开测量的不足 , 高高速铁路 C 1控制 网的 提 P1 I 建 网效率 , 保证 达 到高精 度要 求 , 文 在 C I 并 本 PI平 I
平 差计 算原 理 , 建立 了平差计 算 和精度 评定 的数 并
学 模 型 , 后 , 绍 根 据 该 数 学 模 型 开 发 的 实 用 最 介
C 1三角 高程 网平 差计算 软 件. P1 I
间距 约为 l 2 精度 要 求很 高 , 面 网要 求 相 0~ 0m; 平
邻点 的相 对 点 位 中误 差 不 大 于 -1mm , 程 网 4 j高 -
o sna os sb i ,ad teprm t dut e t eh di ue oo ti teacrt e v t n be Tl ,i ul n aa ee ajs n m to s sd t ba h cua l a o tn t h r m n e e i
法, 又有 中国的矩形 法 .
站 到 C Ⅲ点 的水 平方 向值 、 P 斜距 和竖 直 角. 采用 自
由测 站观 测 , 没有 仪 器 对 中的 问题 , 镜 中心就 是 棱 C Ⅲ三维控 制 点 的 点 位 , 有 目标 对 中和 棱 镜 高 P 没 度 问题 . 样 , 据 自由测站 到 C H点 的斜距 和竖 这 根 PI 直角 , 就可 以计算 测 站到 C Ⅲ点 的三角 高差 . P 一个 C 1平 面 网测 站 一般观 测 1 P1 I 2个 C I点 , 个 自 PI 由单 I 由测站观 测值 形 成 的 三 角 高差 情 况 , 图 1 示. 如 所
三角高程的操作和步骤
三角高程的操作和步骤
刘宏生2010-4-16 一、全站仪假定仪高为0直接测量高程
1:进入坐标测量先测得高差:水准点+高差+棱镜高=所架点的仪器视线高(直接打高程,用于效验结果(简便的高差测量)
2:进入测量模式输入假定的随意坐标,在Z输入仪器视线高,在假定前视坐标完成后输入棱镜高,建站完成后可直接测量该点高程(换点时对中杆高度不变)以上是符合已知两点高程的操作方法
二、三角高程
1、开机普通测量模式下进行盘左盘右测目标点竖直角度和斜距同
时测量该点高差(用于计算效验)
2:数据例计算如下:
正镜:
盘左:83。
55”21”.(减90度计算=6。
4”39”)
高差:11米
斜距:103.891米
倒镜:
盘右:276。
04”51”(减270度=6。
04”51”)
高差:11.003米
斜距:103,891米
其中的高差只是符合参考作用不在计算内,最终盘左和盘右的相
对数据进行平均(度数,高差,斜距)后sin 角度×斜距
该数据为目标点一 目标点二的计算高差, 方法同上 全站仪三角高程简单示意图
待测点
水准点
对中杆
对中杆
21
目标点二
目标点一
最终计算结果为 水准点高程 +h1+h2 为待测点高程 注:如需往桥上引水准点视要求精度而确定测回数。
悬高测量使用步骤:
?。
第四章第三讲第5节三角高程和视距距测量2005年4月1日

式中:R=6371公里 公式改写为:
在煤矿井下测量时,往往直接测量 A 、 B 两点 间的斜距,则:
h=Lsinδ + i — v
三角高程测量一般应进行往返观测,既由A向B观测(称 为直觇),又由B向A观测(称为反觇 )。这样的观测,称为对 向观测。对向观测可以消除地球曲率和大气折光的影响。
第六节 视 距 测 量
仪器中心到测 站点高度 i
利用视线水平时视距公式 计算水平距离
注意事项:
1、安置仪器的方法与上次实验相同。 2、在水准尺上读三个数值(上、中、下丝) 3、测竖直角时不要忘记打开补偿装置。并观 察和判断竖盘注计形式。 4、大坝的斜距可用钢尺直接量得。 5、测量仪器高,觇杆高,并做好记录。 6、认真思考测量的整个过程是否和理论公式 相符合。
第四章 第三讲 三角高程测量和视距测量
华山莲花峰
金沙江
九寨沟
第五节 三角高程测量
在以上图片中的山地或井下测定控 制点的高程时 ,若用水准测量的方法 速度慢困难大。故可采用三角高程测量 的方法。但必须用水准测量的方法在测 区内引测一定数量的水准点,作为高程 起算的依据。以保证高程测量的精度。
O
但是,S′不是实际的尺间隔,实际测得的尺间隔是R及尺 上的MN(即S),因此需要找出S与S′间的关系。
于是
O
上式为视线倾斜时求水平视距的公式。
将式
则得用视距表示得三角高差计算公式:
上式为用上、下丝读数差和竖直角计算高差的公 式。
二、视距测量方法
(1) 在A点安置经纬仪,进行对中、整平,并量取仪 器高 i; ( 2 )用望远镜瞄准 B 点上的视距尺,读取上丝、中 丝 ( 即 7) 和下丝读数.然后用微动螺旋使指标水准 管气泡居中,再读取竖盘读数。 (3) 计算尺间隔S及竖直角,按公式(4—19)和(4—20) 计算水平距离 和高差 h。计算可用电子计算器 进行。视距测量记录及计算格式如表4—3所示。
三角高程测量记录表(实用)
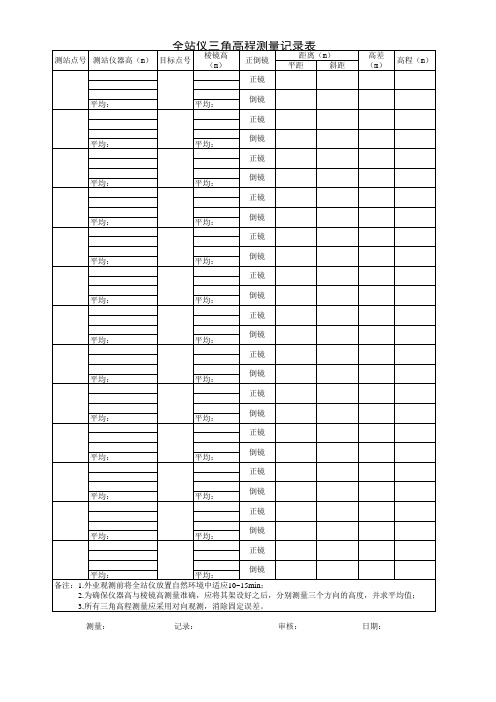
测站点号 测站仪器高(m) 目标点号 棱镜高(m) 正倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 平均: 平均: 倒镜 正镜 倒镜 平均: 平均: 备注:1.外业观测前将全站仪放置自然环境中适应10~15min; 2.为确保仪器高与棱镜高测量准确,应将其架设好之后,分别测量三个方向的高度,并求平均值; 3.所有三角高程测量应采用对向观测,消除固定误差。 测量: 记录: 审核: 日期: 距离(m) 平距 斜距 高差(m) 高程(m)
三角高程

四、仪器高i和目标高v的测定误差 1.测定地形控制点的高程:对于测定地形控 制点高程的三角高程测量,仪器高、觇标高 的测定误差,仅要求精确到厘米级,这是很 容易达到的,测量时认真丈量即可。 2.控制测量的高程:对于用光电测距三角高 程代替四等水准测量时,仪器高和觇标高的 测定要求达到毫米级,其丈量误差应注意控 制,一般丈量两次取其平均值。
2 2 2 2 mh md m S S 2 S hBA AB BA AB
其容许值为:
2 2 S d容
二、三角高程测量的计算 1.三角高程路线的计算 对于控制而言,三角高程导线都应进行往返 观测,其起闭点都应是高级控制点。 (1)高差计算 外业成果检查、整理,不合格的应重测; 画草图,计算相邻点间的高差、距离,当往 返测高差互差符合规范要求后取其平均值。 (2)三角高程路线成果整理 计算高差闭合差: f h h ( H b H a ) 计算每公里高差改正数: 公里 f h / S公里 计算每测段高差改正数: i S i 公里 计算各待定点高程:
D
B p
v
r
EG=IE•tgα
hAB
r=0.08 • s2/R
p=s2/2R
C
HB
通常令 f=p-r,则 f=0.42 s2/R
S B0 R
HB= HA+Stgα+i-v+f
ε
O
HB= HA+Stgα+i-v+f
平距、斜距、视距
四、竖角的测定 竖角的测定一般采用两种方法。 1.中丝法 (1)在测站上安臵好仪器,对中、整平、量 取仪器高i。 (2)盘左位臵瞄准目标,使十字丝的中丝切 目标于某一位臵,其高度即为v。 (3)转动竖盘水准管微动螺旋,使竖盘水准 管气泡居中。读取竖盘读数即为L。 (4)同上法,以盘右位臵照准原目标,读取 竖盘读数即为R。(注意气泡居中)
三角高程测量计算表格
高差 (m)
1
A
B
50.00
30.00
20.00
2
A
C
60.00
20.00
18.00
3
A
D
40.00
15.00
15.00
4
B
A
50.00
-30.00
-20.00
5
B
C
60.00
-20.00
-18.00
6
B
D
40.00
-15.00
-15.00
在上述表格中,每一行代表一次测量操作,其中点号表示测量的顺序,测站点表示测量时站立的位置,目标点表示要测量的目标点。水平距离表示测站点和目标点之间的水平距离,垂直距离表示测站点和目标点之间的垂直距离,高差表示测站点和目标点之间的高差。
根据需要,您可以在表格中添加其他列,例如角度、仪器型号、观测员等,以便更好地记录和整理测量数据。
中间设站三角高程测量计算(2个测回-配合水准导线测量进行高程传递)(1)
24.764 32.961 24.763 32.961 97.427 127.522 97.426 127.522 61.521 61.564 61.521 61.564 41.046 40.554 41.046 40.554
1.537238 1.618289 4.746103 4.665071 1.455042 1.560111 4.82824 4.72321 1.504188 1.638059 4.778988 4.64514 1.559636 1.608786 4.723588 4.67438 4.0 -2.0 -1.0 1.5 10.0 14.0 16.0 18.0
高程 36.78113
0.017793 0.01777327 35.7935 -0.04186 0.017754 -0.10364 -0.1036241 18.756 0.120971 0.12097798 30.163 -0.10361 5.61756 48.919 2.43983 78.8245
半测回竖 一测回竖直 一测回平 改正后高差 单站水平 直角(弧 角值(弧度) 距 均值(m) 距离值(m) 度) 0.030039 0.03009723 46.1445
高程 79.43326
0.035755 0.03585924 60.375 0.030155 0.035963 -0.04595 -0.0458803 58.3435 0.032628 0.03272008 47.889 -0.04581 0.032812 -0.02495 -0.0248831 79.5985 -0.06888 -0.0687975 66.2875 -0.02482 -0.06871 0.060893 0.06107683 54.8265 -0.04708 -0.0469736 43.296 0.061261 -0.04687 -5.38814 98.1225 -2.58669 145.886 4.24612 106.2325 0.77679 106.5195
三角高程测量高差计算表
竖直角α -2°44′33.17″ 2°45′41.33″ -4°06′18.5″ 4°08′51.7″ -2°15′50.17″ 2°16′03″ -2°09′53.83″ 2°09′56.17″ 3°57′24″ -3°57′53.33″ -6°25′56.17″ 6°31′38.17″
测站仪器高i 1.4670
11.497 12.27311
测站点
GP11
GP12
目标点
GP12
GP11
水平距离D 202.5528 202.55148
竖直角α
0°50′54″ -0°46′16.67″
测站仪器高i 1.4373
1.4303
目标棱镜高v 1.347
1.797
球气差改正f 0.00277
0.00277
单向高差h 3.09233 -3.09078
高差较差△h
-2.30889
-0.35639
0.04924
2.57790
1.81133
1.10113
限差值△h限
20.977
平均高 -
差
h
-25.49189
注:△h限=±40√D
记录:
13.775 14.11044
14.726 9.18379 计算:
15.172 -16.47160
13.077 10.12723 复核:
0.00139
0.00139
0.00084
0.00084
0.00395
0.00395
0.00207
0.00207
0.00046
0.00046
单向高差h -0.44887 0.45135 12.91050 -12.90432 -10.81016 10.81087 -6.86823 6.85952 -6.17095 6.16955 12.27352 -12.27271
平差易--三角高程说明书
三角高程应用三角高程数据的录入三角高程的数据录入分数据文件读入和直接键入两种。
凡符合PA2002文件格式(格式内容详见附录A)的数据均可直接读入。
读入后PA2002自动推算高程。
示例:(Sjgc.txt)首先输入测站点,在测站信息区输入数据如下:(当某些信息没有时可以输入零也可为空)点名属性X Y H 仪器高偏心距偏心角A 01 0 0 430.74 1.34 0 0B 01 0 0 422.23 1.28 0 0N1 00 0 0 0 1.3 0 0N2 00 0 0 0 1.32 0 0然后输入测站点观测信息,在观测信息区中输入数据如下:测站点照准点方向值观测边长高差斜距竖直角站标高偏心距偏心角零方向A N1 0 585.08 0 0 -2.28540 2.0 0 0 0B N2 0 713.50 0 0 1.215200 2.0 0 0 0 N1 A 0 585.08 0 0 2.321800 1.3 0 0 0 N1 N2 0 466.12 0 0 4.071200 1.3 0 0 0 N2 N1 0 466.12 0 0 -3.52240 3.4 0 0 0 N2 B 0 713.50 0 0 -1.17420 1.5 0 0 0 如下图:当测站点为N1时在观测信息区中输入其观测数据。
照准点方向值观测边长高差斜距竖直角站标高偏心距偏心角零方向A 0 585.08 0 0 2.321800 1.3 0 0 0N2 0 466.12 0 0 4.071200 1.3 0 0 0说明:①数据为空或前面已输入过时可以不输入。
如上例中,测站点N1信息为空,输入时用户可以在各栏中填0,也可以什么都不输。
②在电子表格中输入数据时,所有零值可以省略不输。
以上数据输入完后存盘其数据文件(格式内容详见附录A)为:[STATION](测站点)A,01,,,430.740000,1.340000,,B,01,,,422.230000,1.280000,,N1,00,,,,1.300000,,N2,00,,,,1.320000,,[OBSER](照准点)A,N1,,585.080000,,,-2.285400,2.000000,,,B,N2,,713.500000,,,1.215200,2.000000,,,N1,A,,585.080000,,,2.321800,1.300000,,,N1,N2,,466.120000,,,4.071200,1.300000,,,N2,N1,,466.120000,,,-3.522400,3.400000,,,N2,B,,713.500000,,,-1.174200,1.500000,,,上面[STATION](测站点)是测站信息区中的数据,[OBSER](照准点)是观测信息区中的数据。