电机数学模型与仿真(浙江大学)
三相异步电机新模型及其仿真与实验
三相异步电机新模型及其仿真与实验1 引言近年来,由于电机控制技术和控制装置的发展,异步电动机的应用范围越来越广泛。
变频调速技术的不断完善,使得异步电动机也能应用于过去只能使用直流电动机的领域,并有逐渐取代直流电动机的趋势。
异步电动机的变频调速控制技术要求对异步电动机实施反馈控制,异步电动机的模型对能否获得正确的控制策略有很大的影响。
至今为止,在三相异步电动机的控制和故障诊断研究[1-3]中,绝大多数采用的是著名的PARK模型。
然而,PARK模型要在电机三相参数是对称状态时才是正确的。
当电机内部发生故障时,这个条件一般不满足。
实践证明:变频调速控制系统在电机內部故障时会产生无效甚至有害的控制后果。
电机模型不合适是重要原因之一。
很多学者为建立模拟三相异步电机內部故障的模型做了大量工作[4-5],经典的是基于有限元计算得到的模型,这类模型可以对电机参数不对称的状态进行详细地模拟[4]。
但这类模型一般都很复杂,不适用于在线应用。
三相异步电动机还有另一种模型,即原始的相轴线模型(ABC坐标模型,方程式(1),(2))。
这种模型在电机三相参数不对称时仍然可以使用。
但是,这种模型的缺点是其部分参数随着电机定、转子间相对位置的变化而变化,是由一组线性变系数微分方程构成的模型。
从应用的角度来看,由于异步电机的转差,定、转子间的相对位置不断变化。
要在线检测定、转子间的相对位置并用到实时控制中去是困难的。
所以,在三相异步电动机的变频调速控制中没有采用这套模型。
针对这个问题,人们提出了很多方案[6-9]:如把不对称相等值成同其它绕组对称的绕组与一附加绕组之和的方法[6];采用参数辨识的方法[7]等等。
但由于这些方法的基础仍是采用PARK模型,只是对其修修补补,因而效果不好。
笔者在从事三相异步电动机的故障诊断研究中,也遇到了没有合适的电机模型的问题。
通过对三相电机运行的物理机理的分析和研究,构造了一个变换函数[10]。
使用该变换函数,得到了三相异步电机的新模型。
新型直流电动机特性仿真研究
提 出了发 展新 一代 电子 换 向直 流 电机 的新 思 想 , 献 文
收稿 日期 :0 1— l一1 21 0 2
作者简介 : 陈敏祥( 6 一 , 浙江武义人 , 1 3 ) 男, 9 博士, 副教授 , 主要从事电力电子技术 、 电机驱动与控制 、 运控电机等方面的研究. - a : x o r 0 @y E mi h t2 0 a l m o0 -
( . o eeo Eetcl nier g Z ei gU iesy a gh u3 0 2 , hn ; 1 C l g f lc a E g ei , hj n nvr t,H n zo 0 7 C ia l i r n n a i 1 2 Z u a Mo o ot l tr o . h hi t nC n o Mo .,Ld , h hi 10 0 C ia i r o C t. Z u a 5 9 0 , hn )
本 研究 假设 新 型 直 流 电动 机 的机
电
工
程
第2 8卷
出 出
晰
:
l r I r绕 电 L J 0 0 0 , … 组 。; : 0 一 : 阻 0 0
。 .
羔
r
I
L
0 0 0
论 基础 和方 法 。
滑动电接触 , 具有调速方便和转矩控制性能好等类似
直 流 电动 机 的特 性 , 已成 为 近 代 运 控 电 动 机 的 主 流 。
但 是它 本 质上 是具 有 自同步 功能 的交 流永 磁 同步 电动
机 , 真正 的直 流 电动机 相 比较仍 有两 项 弱点 : 与 ①绕 组
Ke r s: e DC moo ;o q e s e d c r e ;i l t n S mu ik y wo d n w tr tr u —p e u v s smu ai / i l o n
永磁同步电动机(PMSM)三相坐标系的数学模型
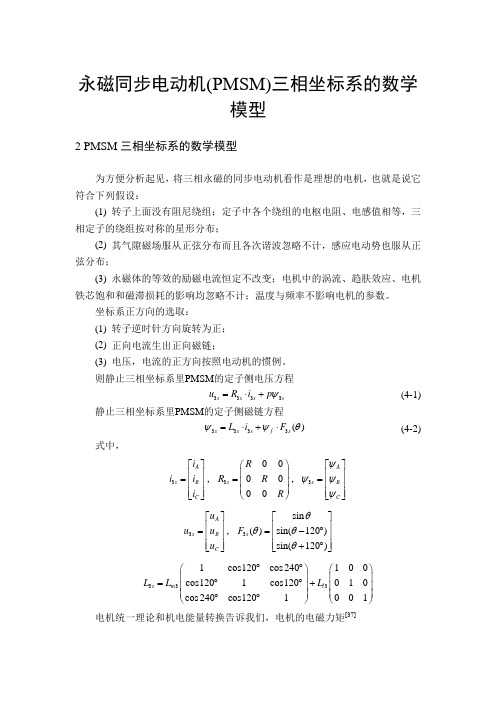
永磁同步电动机(PMSM)三相坐标系的数学模型2 PMSM 三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里PMSM 的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里PMSM 的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)s F θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*I m ()s s e p T n i ψ=- (4-3) 式中,*代表取共轭复数,Im 代表取虚部。
3 PMSMdq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
基于渐消卡尔曼滤波器的永磁同步电机的仿真
图1
P( k+1l )= ( 后 k+1 ) k ( k () I k+1I )+Q k ( 1 1)
系统采 用 双闭 控制 方 案 , 图 2 如 示 。速 度控 制器采 P 控 制 , 度 控 制 I 速 的输 出为给定 的交
/ _
. 斩 c 殳 计
z , 露
…
2渐 消 卡 尔 曼滤 波器
建 立 电机非线 性数 学模 型并将其 离 散化 :
( k+1 =p( ) k+1 k X k , ) ( )+W( ) ( ) k 5 Y k =H( ) ( )+V k () kx k () () 6
YU e, Yu HE ng— o BAO i ig Fe y u, We —nn
( hn nvr t o nn n eh ooy X zo 2 0 8 C ia C iaU i s y f iga dT cn l , u hu2 10 , hn ) e i Mi g
Ab t a t T e a a t eKama l rw t a i gf co su e o sr c h e ma e tma n t y c r n u t r sr c : h d pi l n f t i fd n a tr v ie h wa s d t c n tu t e p r n n g e n h o o smoo o t s
采 用 自适 应 的卡尔 曼滤 波器 , ( 1 变为 : 式 1)
P k+1l )= k+1 ( ( A( ) k+ 1 ) k k P( )X I ( k+l )+Q k I ( 2 1)
【免费下载】浙江大学第十一届大学生数学建模竞赛获奖名单
李林峰 求是学院
三等奖
44 吴蓬威 毕婷宇 白雪彤 求是学院
三等奖
45 蔡国庆 贾孟晗 吕达
求是学院
三等奖
46 吉梁
高茜钰 韩宽
求是学院
三等奖
47 马丹妮 郭璟
李弘毅 求是学院
三等奖
48 靳泰然 李梓玉 宋博
竺可桢学院
三等奖
49 刘辰昂 王文权 刘洋
环境与资源学院、数学系、数学系
三等奖
50 鲁航文 王婷
袁未东
杨笑然 许岚
王子豪 张启迪
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根保通据护过生高管产中线工资敷艺料设高试技中卷术资配,料置不试技仅卷术可要是以求指解,机决对组吊电在顶气进层设行配备继置进电不行保规空护范载高与中带资负料荷试下卷高总问中体题资配,料置而试时且卷,可调需保控要障试在各验最类;大管对限路设度习备内题进来到行确位调保。整机在使组管其高路在中敷正资设常料过工试程况卷中下安,与全要过,加度并强工且看作尽护下可关都能于可地管以缩路正小高常故中工障资作高料;中试对资卷于料连继试接电卷管保破口护坏处进范理行围高整,中核或资对者料定对试值某卷,些弯审异扁核常度与高固校中定对资盒图料位纸试置,.卷编保工写护况复层进杂防行设腐自备跨动与接处装地理置线,高弯尤中曲其资半要料径避试标免卷高错调等误试,高方要中案求资,技料编术试5写交卷、重底保电要。护气设管装设备线置备4高敷动调、中设作试电资技,高气料术并中课3试中且资件、卷包拒料中管试含绝试调路验线动卷试敷方槽作技设案、,术技以管来术及架避系等免统多不启项必动方要方式高案,中;为资对解料整决试套高卷启中突动语然过文停程电机中气。高课因中件此资中,料管电试壁力卷薄高电、中气接资设口料备不试进严卷行等保调问护试题装工,置作合调并理试且利技进用术行管,过线要关敷求运设电行技力高术保中。护资线装料缆置试敷做卷设到技原准术则确指:灵导在活。分。对线对于盒于调处差试,动过当保程不护中同装高电置中压高资回中料路资试交料卷叉试技时卷术,调问应试题采技,用术作金是为属指调隔发试板电人进机员行一,隔变需开压要处器在理组事;在前同发掌一生握线内图槽部纸内故资,障料强时、电,设回需备路要制须进造同行厂时外家切部出断电具习源高题高中电中资源资料,料试线试卷缆卷试敷切验设除报完从告毕而与,采相要用关进高技行中术检资资查料料和试,检卷并测主且处要了理保解。护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
电机数学模型(完整版)

电机数学模型以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;b)忽略齿槽、换相过程和电枢反应等的影响;c)电枢绕组在定子内表面均匀连续分布;d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。
三相绕组为星形连接,且没有中线,则有(2)(3)得到最终电压方程:(4)图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B为阻尼系数;为电机机械转速;J为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce为电动势系数;K2为转矩传递函数,,R为电动机内阻,Ct为转矩系数;T m为电机时间常数,,G为转子重量,D为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
浙江大学电气工程学院(系)校级第十二期SRTP教师立项结
浙江大学电气工程学院(系)校级第十二期SRTP
说明:1.学生参加SRTP 总评成绩按优秀、良好、中等、合格、不合格等级评定。
2.成果形式:按论文(设计)、产品(开发)、专利(推广)、研究报告、调研报告等类别。
3.由学院(系)本科教学管理填写,并存档。
浙江大学电气工程学院(系)校级第十二期SRTP
说明:1.学生参加SRTP 总评成绩按优秀、良好、中等、合格、不合格等级评定。
2成果形式:按论文(设计)、产品(开发)、专利(推广)、研究报告、调研报告等类别。
3.由学院(系)本科教学管理科填写,并存档。
浙江大学电气工程学院(系)院系级第 十二 期SRTP
说明:1.学生参加SRTP总评成绩按优秀、良好、中等、合格、不合格等级评定。
2.成果形式:按论文(设计)、产品(开发)、专利(推广)、研究报告、调研报告等类别。
3.由学院(系)本科教学管理填写,并存档。
浙江大学电气工程学院(系)院系级第十二期SRTP
说明:1.学生参加SRTP总评成绩按优秀、良好、中等、合格、不合格等级评定。
2成果形式:按论文(设计)、产品(开发)、专利(推广)、研究报告、调研报告等类别。
3.由学院(系)本科教学管理科填写,并存档。
浙江大学电气工程及其自动化专业本科培养方案

浙江大学电气工程及其自动化专业培养方案培养目标培养具有扎实的自然科学基础知识,具有良好的人文社会科学、管理科学基础和外语综合能力,从事电力系统及电气装备的运行与控制、研制开发、自动控制、信息处理、试验分析、以及电力电子技术、机电一体化、经济管理和计算机应用等工作的与国际接轨、并具有知识创新能力的宽口径、复合型高级工程技术人才和管理人才, 具有求是创新精神和国际竞争力的未来领导者。
培养要求本专业学生主要学习电工技术、电子技术、信息控制、计算机等方面的技术基础和专业知识。
本专业主要特点是强弱电结合、电工技术与电子技术结合、软件与硬件结合、元件与系统结合、管理科学与工程技术相结合,学生接受电工、电子、信息、控制及计算机技术方面的基本训练,具备从事电力系统及电气装备的运行、研发及管理的综合能力。
本专业设两个模块课程,学生可任选其一修读。
毕业生应获得以下几个方面的知识和能力:1、具有扎实的数学、物理等自然科学的基础知识,具有较好的人文社会科学、管理科学基础和外语综合能力;2、系统掌握本专业领域必需的技术基础理论知识,主要包括电工理论、电子技术、信息处理、自动控制理论、计算机软硬件基本理论与应用等;3、获得较好的工程实践训练,具有熟练的计算机应用能力;4、具有良好的文献检索与阅读能力,了解本专业学科前沿的发展趋势;5、具备较强的科学研究、科技开发和组织管理能力。
专业核心课程计算方法、工程电磁场与波、信号分析与处理、电机学、控制理论、微机原理与应用、电力电子技术、电器原理与应用模块1:电力系统稳态分析、电力系统暂态分析、发电厂电气系统、高电压技术、继电保护与自动装置、电力技术经济基础、电力信息技术模块2:电气装备CAD技术、电气装备建模与分析、机电运动控制系统、电气装备计算机控制技术、现代驱动技术、自动控制元件教学特色课程双语教学课程:DSP在运动控制系统中的应用、直流输电、电力系统运行于控制、机电一体化技术Matlab与机电系统仿真、现代永磁电机理论与控制、可编程控制器系统原版外文教材课程:机电一体化技术研究型课程:直流输电、直线电机理论与应用、电机计算机控制系统、电力电子技术在电力系统中的应用讨论型课程:自动控制元件计划学制4年毕业最低学分160+4+5授予学位工学学士辅修专业说明辅修专业:30学分,其中必修20.5学分标“**”号的课程,选修9.5学分,在标注“*”号和模块课程中选。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z HEJIANG U NIVERSITY电机数学模型与仿真电机数学模型与仿真目录【仅供参考】直流电机建模与仿真---------------------------------------------------------------3电压型PWM 逆变器建模与仿真------------------------------------------------9 电压型PWM 整流器建模与仿真-----------------------------------------------27 异步电机转差频率控制系统---------------------------------------------------64 异步电机间接矢量控制系统---------------------------------------------------74 异步电机直接矢量控制系统---------------------------------------------------81 异步电机直接转矩控制----------------------------------------------------------93 永磁同步电机的数学建模------------------------------------------------------102 永磁同步电机电机建模与仿真-----------------------------------------------113 永磁同步电机的电流控制方法-----------------------------------------------124 无刷直流电机建模与仿真-----------------------------------------------------145 开关磁阻电机建模与仿真-----------------------------------------------------153 电机计算中常用的三角函数关系----------------------------------------------1731直流电机建模与仿真1. 直流电机的数学模型图1为他励直流电机在额定励磁下的等效电路,图中总电阻a R 和电感a L 电力电子变换器的内阻、电枢电阻和电感以及可能在主电路中接入的其他电阻和电感。
a U 为电枢电压,a I 为电枢电流,E 为反电势。
Ea R aL+−图1 直流电机的物理模型1) 电压方程aa a a adI U R I L E dt=++ (1.1) E E E C K φωω==(1.2)式中,E E K C φ=为反电势常数。
2) 转矩方程e T aT a T C I K I φ== (1.3)式中,T T K C φ=为转矩常数,且E T K K =。
3) 运动方程e Ld T T J B dtωω−=+ (1.4)2. 直流电机的动态模型分别对式(1.1)和式(1.4)做Laplace 变换,并整理得()1()()a a a aI s U s E s L s R =−+ (1.5) ()1()()e L s T s T s Js Bω=−+(1.6)由式(1.5)和式(1.6),可得直流电机的动态模型,如图2所示。
在Matlab 中建立的仿真模型如图3所示。
图2 直流电机的动态模型图3 直流电机的Matlab 模型3. 双闭环调速系统系统转速外环和电流内环的直流调速系统是性能很好,应用最广泛的直流调速系统。
转速外环的作用是转速快速跟随其参考值变化,抵抗负载的变化,其限幅值决定了电机允许的最大电流。
电流内环的作用是让电枢电流跟随转速调节器输出的指令,抵抗电网电压波动,在动态过程中,保证获得电机所允许的最大电枢电流,以最大转矩加减速,从而加快了动态响应,在电机堵转的时候,还能起到自动的保护作用。
斩波控制的双闭环直流调速系统的结构框图如图4所示,其主电路如图5所示。
图5中功率器件1S 、2S 、3S 和4S 以及其反并联二极管组成了一个H 桥,可实现直流电机的可逆四象限运行。
图4 斩波控制的双闭环直流调速系统+-V图5 双闭环直流调速系统主电路4. Matlab 仿真框图双闭环调速系统的Matlab 仿真框图如图6所示。
图中转速调节器和电流调节器均为PI 调节器,斩波器是H 桥变换器。
图6 双闭环直流调速系统的Matlab仿真框图5.仿真结果仿真结果如图7、图8和图9所示。
图7 滤波后的电枢电压(截止频率为500Hz)图8 负载转矩和电磁转矩图9 电枢电流和转速参考文献1.Ion Boldea, S. A. Nasar, Electric Drives (2nd edition), Taylor & Francis , 2005, pp. 119-140.2.Paul C. Krause, Oleg Wasynczuk, Scott D. Sudhoff. Analysis of electric machinery anddrive systems (2nd edition), John Wiley and Sons, New York, 2002, pp. 427-476.3.陈伯时,电力拖动自动控制系统—运动控制系统(第3版),机械工业出版社,2009,pp. 1-50。
电压型PWM 逆变器建模与仿真1. SPWM 电压型逆变器1.1 SPWM 逆变器的数学模型根据SPWM 控制的基本原理,设三角载波与正弦调制波的频率之比为载波比,记为f K ;三角载波的正弦调制波的幅值之比为调制比,记为a K 。
为保持三相系统之间的对称性,以及每相正、负半周的对称性,载波比f K 应取为3的整数倍,并且应为奇数,即3(21), 1,2,f K i i =−= ;而调制比1a K ≥。
如图1所示,设三相 图1 SPWM 正弦波与三角波信号正弦波信号的幅值为1,其数学表达式可写为1112sin()22sin()322sin()3rarb rc u t T u t T u t T πππππ ==− =+(1.1)式中,1T 为正弦波的周期。
三角波信号的表达式则为22224(1) (0)24(3) (0)2a c a T t K t T u T t K t T−≤≤ =−+≤≤(1.2)式中,2T 为正弦波的周期,且12/f T T K =。
SPWM 电压型逆变器一般是180°导通型,即任何时刻,三相桥臂的每一相总有一个开关器件处于导通状态,而另一个处于关断状态,并且当正弦波信号r u 大于三角波信号c u 时,上桥臂的开关器件导通;而当正弦波信号r u 小于或等于三角波信号c u 时,下桥臂的开关器件导通。
这样,设立三个开关相变量(1,2,3)i V i =就能很方便的得到逆变器的输出线电压,也就是电动机定子端的输入电压。
1 () 1,2,31 ()r c i r c u u V i u u > == −≤(1.3)线电压可表示为() (1,2,3;1,2,3;)2djk j k U U V V j k j k =−==≠ (1.4)式中,d U 为直流电源电压。
o图2 SPWM 电压型逆变器主电路下面推导负载对称情况下逆变器的输出相电压ao U 、bo U 、co U 。
如图2所示,又逆变器输出端至直流电源中线点g 的电压为ag ao og bg bo og cg co og U U U U U U UU U =+ =+ =+ (1.5)式中,og U 为负载中性点与直流电源中性点之间的电压。
在对称负载条件下,0ao bo co U U U ++=,由式 (1.5) 可得()/3og ag bg cg U U U U =++(1.6)将式 (1.6) 代回式 (1.5),得(2)/3(2)/3(2)/3ao ag bg cg bo ag bg cg co ag bg cg U U U U U U U U U U U U =−−=−+−=−−+ (1.7)由式 (1.4) 可知AB 线电压t(s)U ab相电压t(s)U a 0123222d agd bg d cgU U V U U V U U V===(1.8)将式(1.8) 代入式 (1.7) ,得123123123(2)6(2)6(2)6d aod bo d coU U V V V U U V V V U U V V V=−−=−+−=−−+(1.9)1.2 仿真实例下面是一个实例(SPWM.m),有关参数为:直流电压390V d U =,正弦波信号频率150Hz f =,载波比21f K =,调制比4/3a K =。
仿真得到的线电压和相电压分别如3所示。
a) b) 图3 SPWM 电压型逆变器输出电压的仿真波形a) 线电压 b)相电压%% SPWM 电压型逆变器的数学模型% 参数输入 clcclose all clear allUd = 390; % 直流母线电压 F1 = 50; % 调制波的频率h = 1e-6; % 仿真步长Tend = 0.025; % 仿真时间Kf = 21; % 调制比Ka = 4/3; % 载波比(三角波/正弦波)F2 = Kf * F1;T1 = 1/F1;T2 = 1/F2;P(1) = 0;P(2) = 2 *pi/3;P(3) = 4 * pi/3;%% Main Programt = 0;i = 1;while t <= Tendtt2 = rem(t,T2); % 生成三角载波if tt2 <= T2/2;A2 = Ka * (4 * tt2/T2 - 1);elseA2 = Ka * (-4 * tt2/T2 + 3);endfor k = 1 : 3 % 生成三相调制波A1 = sin(2 .* pi * t/T1 - P(k));if A1 > A2 % 开关函数S(k) = 1;elseS(k) = -1;endend% 逆变器输出线电压Uab = (S(1) - S(2)) * Ud/2;Ubc = (S(2) - S(3)) * Ud/2;Uca = (S(3) - S(1)) * Ud/2;% 逆变器输出端至直流中性点的电压Uag = S(1) * Ud/2;Ubg = S(2) * Ud/2;Ucg = S(3) * Ud/2;% 负载电机相电压Ua0 = (2 * Uag - Ubg - Ucg)/3;Ub0 = (-Uag + 2 * Ubg - Ucg)/3;Uc0 = (-Uag - Ubg + 2 * Ucg)/3;% ---------------------------------------------------------- tx(i) = t;Uaby(i) = Uab;Ubcy(i) = Ubc;Ucay(i) = Uca; Uagy(i) = Uag; Ubgy(i) = Ubg; Ucgy(i) = Ucg; Ua0y(i) = Ua0; Ub0y(i) = Ub0; Uc0y(i) = Uc0; A1y(i) = A1; A2y(i) = A2; t = t + h; i = i + 1; end% -----------------------------------------------------------figure(1); plot(tx,Uaby); title('AB 线电压'); xlabel('t(s)'); ylabel('Uab'); grid; figure(2); plot(tx,Ubcy); title('BC 线电压'); xlabel('t(s)'); ylabel('Ubc'); grid; figure(3); plot(tx,Ucay); title('CA 线电压'); xlabel('t(s)'); ylabel('Uca'); grid; figure(4); plot(tx,Uagy); title('AG 电压'); xlabel('t(s)'); ylabel('Uag'); grid; figure(5); plot(tx,Ubgy); title('BG 电压'); xlabel('t(s)'); ylabel('Ubg'); grid; figure(6); plot(tx,Ucgy); title('CG 电压'); xlabel('t(s)'); ylabel('Ucg'); grid; figure(7); plot(tx,Ua0y); title('A 相电压'); xlabel('t(s)'); ylabel('Ua0'); grid; figure(8); plot(tx,Ub0y); title('B 相电压'); xlabel('t(s)'); ylabel('Ub0'); grid; figure(9); plot(tx,Uc0y); title('C 相电压'); xlabel('t(s)'); ylabel('Uc0'); grid;2. 基于Simulink 的PWM 逆变器通用模型PWM 逆变器在自动控制系统,如交流变频调速、高频开关电源以及功率因数校正等系统中的应用颇为广泛,而PWM 逆变器的控制模式有多种多样,为此对于系统仿真而言,搭建PWM 逆变器的通用仿真模块就显得尤为必要。