基于Bresenham算法的直线脉冲增量插补方法
基于Bresenham算法的反走样直线整数生成算法

基于Bresenham算法的反走样直线整数生成算法
牛连强;邵中
【期刊名称】《沈阳工业大学学报》
【年(卷),期】2009(031)006
【摘要】为了实现简单、快速的光滑直线绘制,利用修改的Bresenham直线生成算法,提出了一个完全利用整数运算实现的两点宽像素级反走样直线逐点绘制算法.该算法根据距离差控制参数产生候选点与理想直线间的精确距离,进而控制两个同时被点亮的像素点的亮度.利用区间近似消除了算法中的整数乘除法运算,并利用周期性和对称性提高了算法的效率.分析表明,新算法仅比Bresenham直线生成算法多用几次整数比较运算和簿记工作,具有较高的光滑直线生成速度,且易于硬件和算法语言的实现.
【总页数】5页(P686-690)
【作者】牛连强;邵中
【作者单位】沈阳工业大学,软件学院,沈阳,110023;沈阳工业大学,软件学院,沈阳,110023
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Bresenham算法的整数反走样椭圆生成算法 [J], 牛连强;邵中;吴澎
2.一种基于Bresenham算法的直线快速反走样技术 [J], 舒若;张焕春;经亚枝
3.直线与典型曲线的统一反走样整数生成算法 [J], 牛连强;邵中
4.基于Bresenham算法的直线周期性生成 [J], 赵婷婷
5.基于FPGA的反走样直线生成算法研究 [J], 王文栋;李开宇;杨盛亚
因版权原因,仅展示原文概要,查看原文内容请购买。
中点bresenham算法过程

中点Bresenham算法是一种用于计算在直线上的格点的算法。
它是由Bresenham在1965年提出的,是一种高效的计算机图形学算法,通常用于直线、圆、椭圆等形状的绘制。
通过这篇文章,我们将详细介绍中点Bresenham算法的过程。
1. 背景知识在计算机图形学中,我们经常需要在屏幕上绘制直线、圆、椭圆等形状。
而计算机屏幕上的图像是由像素组成的,因此我们需要一种算法来计算出这些形状上的像素坐标,从而进行绘制。
中点Bresenham算法就是用来解决这个问题的。
2. 中点Bresenham算法的原理中点Bresenham算法的原理是通过巧妙的数学推导,找到离直线最近的像素点,从而确定需要绘制的像素坐标。
该算法通过利用误差项来判断下一个像素点的位置,具有高效、简洁的特点。
3. 中点Bresenham算法的过程中点Bresenham算法的过程可以分为以下几个步骤:3.1 初始化变量:首先需要确定直线的起点和终点,并初始化相关变量,如起点坐标(x0, y0)、终点坐标(x1, y1)、误差项d和增量变化量dx、dy等。
3.2 计算斜率k和误差项初始值:通过计算直线的斜率k,并根据斜率确定误差项的初始值。
3.3 循环计算像素点的坐标:根据误差项的大小,确定下一个像素点的位置,并更新误差项的值,直到绘制完整条直线。
4. 中点Bresenham算法的优势* 算法简洁高效:中点Bresenham算法通过简单的数学计算,即可确定直线上的像素坐标,避免了直接计算斜率导致的浮点数运算,因此在计算速度上具有较大优势。
* 适用范围广泛:中点Bresenham算法不仅适用于直线,还可以用于绘制圆、椭圆等图形,具有良好的通用性。
5. 中点Bresenham算法的应用中点Bresenham算法广泛应用于计算机图形学中的直线、圆、椭圆等图形的绘制。
其高效、简洁的特点使得它成为了计算机图形学中不可或缺的算法之一。
中点Bresenham算法是计算机图形学中的重要算法之一,通过巧妙的数学计算,实现了高效、简洁的直线绘制。
bresenham算法实现直线段插值函数
在计算机图形学中,Bresenham算法是一种用于在离散坐标系上绘制直线段的算法。
它是一种高效的算法,能够准确地计算出直线段上的所有像素点,使得在计算机屏幕上显示出直线段来。
Bresenham算法的实现可以帮助我们更好地理解画线原理,并且在计算机视觉、图像处理等领域有着广泛的应用。
1. Bresenham算法的原理Bresenham算法是通过计算直线段的斜率来确定每个像素点的位置。
具体来说,它利用了直线的对称性和整数的特性,通过计算像素点与真实直线的距离来判断下一个像素点应该取的位置。
这样可以避免使用浮点运算,使得算法更加高效。
2. 实现Bresenham算法的关键步骤在实现Bresenham算法时,需要考虑以下几个关键步骤:- 初始化各个变量,包括起始点(x0, y0)和终点(x1, y1),以及斜率的计算值,例如dx和dy。
- 根据斜率的正负情况,确定每个像素点的增量步长,以便在遍历过程中准确计算出像素点来。
- 利用对称性和整数特性,进行迭代计算,逐步确定直线段上的所有像素点的位置。
3. Bresenham算法的优缺点Bresenham算法作为一种离散直线段插值算法,具有以下几个优点:- 算法简单高效,节省存储空间和运算时间。
- 可以高效地解决像素化显示问题,避免了浮点运算的复杂性。
- 在硬件上实现时,只需少量的资源就能完成计算,适合嵌入式系统和图形处理器。
然而,Bresenham算法也存在一些缺点,比如对于曲线的绘制就不太奏效,因为它是基于直线段的形式来处理的。
4. 我对Bresenham算法的理解在我看来,Bresenham算法是一种经典的离散直线段插值算法,其思想简洁高效。
它通过逐步迭代的方式,计算出直线段上的所有像素点位置,使得在计算机屏幕上显示出直线段来更加精确。
这种算法的实现可以帮助我们更好地理解画线的原理,对于理解计算机图形学和计算机视觉都有着重要的意义。
总结起来,Bresenham算法作为一种高效的离散直线段插值算法,具有着重要的理论和实际价值。
Bresenham算法
Course PagePage 1 of 6课程首页 > 第二章 二维图形的生成 > 2.1 直线的生成 > 2.1.2 生成直线的Bresenham算法全部隐藏2.1.2 生成直线的Bresenham算法从上面介绍的DDA算法可以看到,由于在循环中涉及实型数据的加减运算,因此直线的生成速度较慢。
在生成直线的算法中,Bresenham算法是最有效的算法之一。
Bresenham算法是一种基于误差判别式来生成直线的方法。
一、直线Bresenham算法描述: 它也是采用递推步进的办法,令每次最大变化方向的坐标步进一个象素,同时另一个方向的坐标依据误差判别式的符号来决定是否也要步进一 个象素。
我们首先讨论m=△ y/△x,当0≤m≤1且x1<x2时的Bresenham算法。
从DDA直线算法可知这些条件成立时,公式(2-2)、(2-3)可写成: xi+1=x i+1 yi+1=y i+m (2-6) (2-7)有两种Bresenham算法思想,它们各自从不同角度介绍了Bresenham算法思想,得出的误差判别式都是一样的。
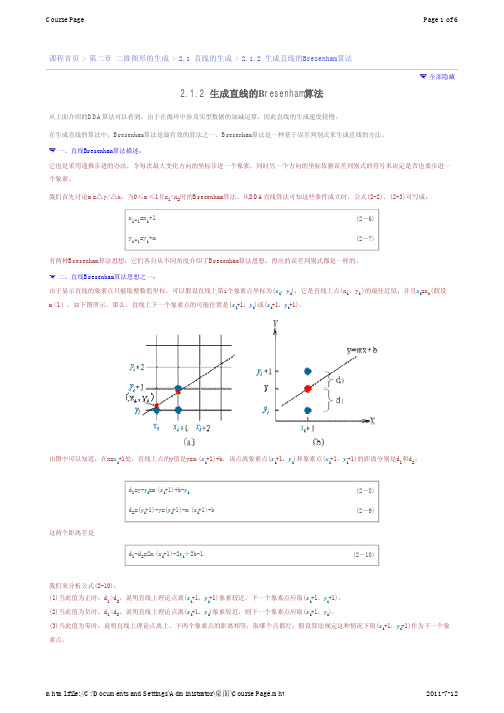
二、直线Bresenham算法思想之一: 由于显示直线的象素点只能取整数值坐标,可以假设直线上第i个象素点坐标为(xi,yi),它是直线上点(xi,yi)的最佳近似,并且xi=xi(假设 m<1),如下图所示。
那么,直线上下一个象素点的可能位置是(xi+1,yi)或(xi+1,yi+1)。
由图中可以知道,在x=xi+1处,直线上点的y值是y=m(xi+1)+b,该点离象素点(xi+1,yi)和象素点(xi+1,yi+1)的距离分别是d1和d2:d1=y-yi=m(xi+1)+b-yi d2=(yi+1)-y=(yi+1)-m(xi+1)-b 这两个距离差是 d1-d2=2m(xi+1)-2yi+2b-1(2-8) (2-9)(2-10)我们来分析公式(2-10): (1)当此值为正时,d1>d2,说明直线上理论点离(xi+1,yi+1)象素较近,下一个象素点应取(xi+1,yi+1)。
基于Bresenham算法的数控打标机中直线运动控制的实现

为 ( , )d= O 0 ,o0,计 算 下 一 点 C 时 , _d+ y A ,得 d : .< d_ o A / x = 104 O5, . C点 坐 标 为 ( , )其 余 点 类 推 。 10 ,
'
都 有 步 进 电机 驱 动 , 有 主 轴 电机 驱 动 的 刻 刀 。底 座 是框 架结 Z轴
可 以方 便 地 上下 、左 右
/
C
图 2 误 差 d 的 意 义
令 e d 05 = 一 .,则 初 值 e= 05 ~ .≤e 05 0 一 ., 05 < .。第 i 的 e 点 , =
d 05 d一 + y A 一 .= 1 A / x e≥0时 , i 的 坐 标 . .= . 1 & / x 05 e + y A , . 一 一 第 点
本 文设 计 了采 用刻 刀 旋转 工作 的数控 打 标机 , 具有 刻 深大 、 它 清晰 、 不易 磨 损 和耐锈 蚀 等优 点 , 非激 光 及其 它 打标 机所 能及 。
1 打 标 机 结 构 和 工 作原 理
要 求 工 作 运 动速 度 快 , 因此 控 制 器 需 要 在 高频 下 实 时 完 成 轨 迹 、
对 刀 。 时 , 制 器 已知 此 控 道 刀 尖 与工 件 的 位 置 关 系 , 刻标记做好准备 。 为
Bresenham快速画3D直线算法

Bresenham快速画3D直线算法--------yangzhengyun一、简述前段时间一个学弟正在做一个LED立方,说想做了送给女友。
但他说在画直线,球,波浪等图案时,总是找不到一个很好的算法,导致显示刷屏很慢甚至出现闪屏的现象,问我有没有什么好的算法。
刚好前段时间我也在弄这个,刚开始的时候,我竟然也被“如何画一条3D直线”难倒了,有的人说——画直线还不简单啊,两个点确定一条直线,那是高中数学里面最简单不过的方程式了。
没错,如果是运用高中的方程式来编程,确实很简单,但是……我们先来看一下直线的方程式吧:如我们知道了两个坐标点:A(x1,y1,z1),B(x2,y2,z2)。
那么直线的方程是:K=(x-x1)/(x2-x1)=(y-y1)/(y2-y1)=(z-z1)/(z2-z1)这就不化简了,但是你们有木有发现一个问题。
对,那就是都是进行浮点运算。
我们试想想,如果是用8位的单片机来做的话,速度不知道将会慢到什么程度了。
且,画直线函数基本可以说是底层的驱动函数,如果一个驱动函数都占据了很多的运行时间的话,上层的代码写的再好也是无用的。
为此我们必须找到一个好的办法,避开浮点运算。
即把浮点数据转换成整形数据进行运算,这样速度可以得到很大的提升。
为此,我们首选的就是Bresenham算法了,它引入了一个误差常量e(即后面用到的ey,ez),e的值为-1/2;在这个运算思路中,我们还是要用到上面的直线方程做为基础。
所以,在看这个代码的时候,你必须先有这点数学的基本知识才行,不然你看的就云里雾里,两眼冒金星了。
下面帖出的是本人经过上网预览大量资料后,写出的三维基于Bresenham算法的画直线函数,二维的就不贴出了,因为二维的在网上有大把的源码,但是三维现成源码就不多了,当然资料还是有的。
里面的算法,和二维算法的思路是一样的,具体的各位学弟们自己去网上查吧,百度一下“Bresenham算法”够你看了,要有多详细有多详细。
bresenham画线算法详解

给定两个点起点P1(x1, y1), P2(x2, y2),如何画它们直连的直线呢,即是如何得到上图所示的蓝色的点。
假设直线的斜率0<k>0,直线在第一象限,Bresenham算法的过程如下:1.画起点(x1, y1).2.准备画下一个点,X坐标加1,判断如果达到终点,则完成。
否则找下一个点,由图可知要画的点要么为当前点的右邻接点,要么是当前点的右上邻接点。
2.1.如果线段ax+by+c=0与x=x1+1的交点y坐标大于(y+*y+1))/2则选右上那个点2.2.否则选右下那个点。
3.画点4.跳回第2步5.结束具体的算法如下,原理就是比较目标直线与x+1直线交点的纵坐标,哪个离交点近就去哪个void Bresenhamline(int x0, int y0, int x1, int y1, int color){int x, y, dx, dy;float k, e;dx = x1 - x0;dy = y1 - y0;k = dy / dx;e = -0.5;x = x0;y = y0;for (x= x0;x < x1; x++){drawpixel(x, y, color);//这个是画点子函数e = e + k;if (e > 0){y++;e = e - 1;}}}上述Bresenham算法在计算直线斜率与误差项时用到小数与除法。
可以改用整数以避免除法。
等式两边同时乘以2*dx,得到2*e*dx = 2*e*dx + 2dy, 2*e*dx = 2*e*dx - 2*dx.由于算法中只用到误差项的符号,因此可作如下替换:2*e*dx.改进的Bresenham画线算法程序:将e统一乘以2*dx即变成了整数的Bresenhan算法了,^_^void InterBresenhamline (int x0, int y0, int x1, int y1, int color){int dx = x1 - x0;int dy = y1 - y0;int dx2 = dx << 1;//乘2int dy2 = dy << 1;//乘2int e = -dx;int x = x0;int y = y0;for (x = x0; x < x1; x++){drawpixel (x, y, color);e=e + dy2;if (e > 0){y++;e = e - dx2;}}}。
Bresenham算法-直线光栅化算法

Bresenham算法是计算机图形学典型的直线光栅化算法。
∙从另一个角度看直线光栅化显示算法的原理o由直线的斜率确定选择在x方向或y方向上每次递增(减)1个单位,另一变量的递增(减)量为0或1,它取决于实际直线与最近光栅网格点的距离,这个距离的最大误差为0.5。
∙1)Bresenham的基本原理o假定直线斜率k在0~1之间。
此时,只需考虑x方向每次递增1个单位,决定y方向每次递增0或1。
设直线当前点为(xi,y)直线当前光栅点为(xi,yi)则下一个直线的点应为(xi+1,y+k)下一个直线的光栅点或为右光栅点(xi+1,yi)(y方向递增量0)或为右上光栅点(xi+1,yi+1)(y方向递增量1)记直线与它垂直方向最近的下光栅点的误差为d,有:d=(y+k)–yi,且0≤d≤1当d<0.5:下一个象素应取右光栅点(xi+1,yi)当d≥0.5:下一个象素应取右上光栅点(xi+1,yi+1)如果直线的(起)端点在整数点上,误差项d的初值:d0=0,x坐标每增加1,d的值相应递增直线的斜率值k,即:d=d + k。
一旦d≥1,就把它减去1,保证d的相对性,且在0-1之间。
令e=d-0.5,关于d的判别式和初值可简化成:e的初值e0= -0.5,增量亦为k;e<0时,取当前象素(xi,yi)的右方象素(xi+1,yi);e>0时,取当前象素(xi,yi)的右上方象素(xi+1,yi+1);e=0时,可任取上、下光栅点显示。
Bresenham算法的构思巧妙:它引入动态误差e,当x方向每次递增1个单位,可根据e 的符号决定y方向每次递增 0 或 1。
e<0,y方向不递增e>0,y方向递增1x方向每次递增1个单位,e = e + k因为e是相对量,所以当e>0时,表明e的计值将进入下一个参考点(上升一个光栅点),此时须:e = e - 1∙2)Bresenham算法的实施——Rogers 版o通过(0,0)的所求直线的斜率大于0.5,它与x=1直线的交点离y=1直线较近,离y=0直线较远,因此取光栅点(1,1)比(1,0)更逼近直线;o如果斜率小于0.5,则反之;o当斜率等于0.5,没有确定的选择标准,但本算法选择(1,1)(程序)▪//Bresenham's line resterization algorithm for the first octal.▪//The line end points are (xs,ys) and (xe,ye) assumed not equal.▪// Round is the integer function.▪// x,y, ∆x, ∆y are the integer, Error is the real.▪//initialize variables▪x=xs▪y=ys▪∆x = xe -xs▪∆y = ye -ys▪//initialize e to compensate for a nonzero intercept▪Error =∆y/∆x-0.5▪//begin the main loop▪for i=1 to ∆x▪ WritePixel (x, y, value)▪if (Error ≥0) then▪ y=y+1▪ Error = Error -1▪ end if▪ x=x+1▪ Error = Error +∆y/∆x▪next i▪finish∙3)整数Bresenham算法o上述Bresenham算法在计算直线斜率和误差项时要用到浮点运算和除法,采用整数算术运算和避免除法可以加快算法的速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
= Y. l+ + 一 . , +1 ,一0. 5
由于 x方 向坐标增 长最快 , 把 x轴作 为基 本 我们
轴, 每次计算循环 方 向都增加一个 长度单位 , F 而 轴 和 z轴 的情况 要通 过计 算来决 定 。 如 图 1 示 , 。 , :) 直线 上第 £ 点 , 所 P( Y,。为 个 直
㈩
. …
.
.
05
增量插 补算 法 , 于二 维 直线 , 大理 论 误 差 为 05 对 最 .; 对 于三维直 线 , 最大理论 误差 为√ /, 077 2即 .0
一 一
f (… ) 一1 E +
E +) ( J ≥0
l ( 1 +k +) E 算 法中计 算 . +1 . ( ,
, +1
£ : t≥ o (. ) + s +) ( 1 <0
.
设直线的起点坐标 为 ( , , )终点坐标为 ,
P t , , , z) / x Ax=x . 一x , y= 一 . Az=z A , 一z ,
: :: “
插 补 。本文 将 计 算 机 图形 学 中生 成 直 线 的 Be n rs — e hm算 法 用于 直 线 脉 冲增 量 插 补 , a 由于 该 算 法 可 以
) )
n
图 】 P t_的选 掸 il
设 . 所对 应 的空间 网格 点 的坐标 为 ( H p | t, ,
开环数控系统。传统的脉冲增量插补是用硬件来实现 的, 计算速度很快。现代数控系统 的插补功能一般用 一 问 软 件来实 现 + 因此插 补 算 法 的效 率 就成 为一 个重 要
, +
题。
二 =
t
传统的几种直线脉 冲增量插补算法都存在这样一 个缺 陷 : 次定时 中断 只对一 个 或最 多两 个 坐标 进 行 每
本文将计算机图形学中生成直线的算法用于直线脉冲增量插补由于该算法可以在一次定时中断中同时对三个坐标进行计算处理因此效率大大提高了
维普资讯
埘m0 口 工艺与检潮 1 n g d y
基 于 B e e h m 算 法 的直 线 脉 冲 增量 插 补 方法 rs n a
+
)其 中的 Y . 由 、 经过 圆整得来 的。由 , .、 . 是 Z i
在一次定时 中断中同时对三个坐标进行计算处理 , 因 此效 率大 大提高 了 。
Beehm算 法 可 知 , 果 令 £( 1 : y 一y 一 r na s 如 y. ) …
o 5 e ) … 一 , . , 有 . , (… :: 一0 5 则
Y ¨ , Y +1 H+ : . 1 £( 1 ≥0 Y+) £ + )<0 ‘ 1 () 1
2 rsn a B eeh m算 法向三维情况的推广
Be  ̄ m算 法 可 以推 广 到三 维 情 况用 来 生 成 空 rs m e
间直 线 。
+. t ,
A L e r u e|o r na IeplinB sdo r e hm l h i a I nmr tln r ao ae nBe na Ag m n P9  ̄ t o t  ̄ 0 大学先进 制造 技术研 究所 )
摘
要: 文章 提 出采用 Beehm 算 法进 行 空间直线脉 冲 增量 插 补 的方 法 。 出 了理论 分析 和 计 算 方法 。 rsna 给 并
第一作 者 : 习曼 , 潘 湖北十堰 市 东风汽 车公 司设 备 制造 厂 , 编 :40 2 邮 42 2
( 辑 编
周 富 荣) ( 修改稿日 0一2 加1 收 期: o 1一 0
、
0
…
l
维普资讯
工茗与检溺 ng 州 0y l 0a
() 2
, ,
由表 达 式 ( ) ( ) 知 : 1和 2 可 P
( +1 ,
:A l x 七 △=△ 并设 △ yL , = , ,  ̄ ≥△ y>A >0 z 。
4 ) 一定 为 图 1中点 12 34中 的 一 个 由计 算 £ 、、 、
() ・ 的公 式 可知
插补。
∈ z+) (I1 <0
.
表达式 ()~() 成 了空 间直 线 Beeh n生 成 1 4构 r nm s , 扎 、 ( +) E ) E 2 和 ( :的递推公 式 。下 面把 这 种方 法 用作 空 间 直线 的 )
用具体实例分析了计算误差、 算法效率和插补速度。分析计算结果表 明: 提出的直线脉冲增量插补 算法具有较高的效率和精度 。 适用于中高精度、 以步进电动机为执行元件的数控系统。
关键 词 : 直线 脉 冲增 量插补 数控 B  ̄ nm 算 法 r eim
1 引言
脉 冲增 量插补 适用 于 以步进 电动机为执 行元 件 的
线上 第 +1 个点 为 P ( l + +)其 中 , .,
+ l + 1,
=
{j.。 () c 【一. k £ < , -r。 Y , / 一 一 0 , “. y 0  ̄ … 。 ‘ -+ . 5 、
f ('- + 一1 £ Y+) i
∈ +) . — +.一o 5 (. = L 2 2 .
=t+ + l
z, <
=
-
4 插 补误 差
由图 2可 以看 出 , 用基 于 Beehm算 法的脉 冲 采 r na s
E :+ ) 【 1 <0
一 ; + . 0. J 一 5
, z ̄ r -
0. + k 5 s
l ( .1 Y+)+ e
e +) ( t≥0
£ Y+ ) ( . <0
Y+ : + ( + 一 ) ) .』 l +k ,
了 自动线 的生产 率 ; () 孔刀尖 使用 寿命 还 是略 有浪费 , 是零 件 转 4短 这 向节两孔 长度 不等 留下 的唯 一不 足。