使用AMESim对电动助力转向系统建模
基于AMESim的矿用汽车全液压转向系统建模与仿真

基于AMESim的矿用汽车全液压转向系统建模与仿真孟兆磊;姜勇;王娟;何建成【期刊名称】《机床与液压》【年(卷),期】2014(42)10【摘要】The full hydraulic steering system of SGA170 mine truck was used as research object,its dynamic characteristics was simulated by AMESim,the characteristics and simulation curves of the steering system and the steering mechanism under various con-ditions wereobtained,which provided theoretical reference and technical support to the design and analysis of full hydraulic steering system of the heavy-duty mine truck,and had important value in engineering.%以SGA170矿用汽车全液压转向系统为研究对象,利用AMESim仿真软件对全液压转向系统进行机械-液压耦合建模,并进行动态特性仿真分析,获取了各种工况下的全液压转向系统与转向执行机构之间的动态特性及其仿真曲线,为大型矿用汽车全液压转向系统的合理设计和分析提供理论参考与技术支持,具有重要的工程应用价值。
【总页数】4页(P111-113,117)【作者】孟兆磊;姜勇;王娟;何建成【作者单位】北京科技大学资产管理处,北京100083;北京矿冶研究总院,北京100160;北京矿冶研究总院,北京100160;北京矿冶研究总院,北京100160【正文语种】中文【中图分类】TP242.6【相关文献】1.基于AMESim矿用自卸车全液压转向系统建模分析 [J], 戴正阳2.基于AMESim的全液压转向系统的仿真分析 [J], 贺海洋;李建朝3.基于AMESim全液压转向系统的建模与分析 [J], 张应和;郭峰;杨世强4.基于AMEsim-Simulink/Stateflow联合仿真平台的控制策略建模和车辆性能仿真 [J], 徐统伟; 王玉林; 刘晚霞; 王炳超5.基于AMESim/Simulink联合仿真的电动辅助转向系统的建模与仿真 [J], 程玉; 张志斌因版权原因,仅展示原文概要,查看原文内容请购买。
基于Adams与Matlab的汽车电动助力转向系统的联合仿真

基于Adams与Matlab的汽车电动助力转向系统的联合仿真一、本文概述随着汽车工业的快速发展和环保理念的深入人心,电动汽车在全球范围内得到了广泛的关注和研究。
电动助力转向系统(EPS)作为电动汽车的重要组成部分,其性能直接影响到车辆的操控性和安全性。
对电动助力转向系统进行深入研究,优化其设计,提高其性能,对于推动电动汽车的发展具有重要意义。
本文旨在通过Adams与Matlab的联合仿真,对汽车电动助力转向系统进行深入研究。
介绍了电动助力转向系统的基本原理和结构,分析了其在实际应用中的挑战和难点。
详细阐述了Adams和Matlab在电动助力转向系统仿真中的应用,包括模型的建立、仿真参数的设置、仿真结果的获取和分析等。
通过Adams进行机械系统的运动学和动力学仿真,结合Matlab进行控制系统设计和优化,实现了对电动助力转向系统的全面仿真分析。
本文的研究方法结合了仿真模拟和理论分析,旨在通过联合仿真,对电动助力转向系统的性能进行深入挖掘和优化。
通过对比不同参数和设计方案下的仿真结果,本文为电动助力转向系统的设计和优化提供了有价值的参考。
本文的研究不仅有助于加深对电动助力转向系统的理解,也为电动汽车的发展提供了有益的探索和实践。
通过Adams与Matlab的联合仿真,我们可以更加准确地预测和优化电动助力转向系统的性能,为电动汽车的安全性和操控性提供有力保障。
二、汽车电动助力转向系统概述汽车电动助力转向系统(Electric Power Steering,简称EPS)是一种通过电动机提供辅助转向力矩的先进转向系统。
该系统主要由转向传感器、车速传感器、扭矩传感器、电子控制单元(ECU)和助力电机等组成。
EPS系统的核心在于电子控制单元,它可以根据驾驶员的转向意图、车速以及转向力矩等因素,实时计算出所需的辅助转向力矩,并通过助力电机为驾驶员提供适当的助力。
与传统的液压助力转向系统(Hydraulic Power Steering,简称HPS)相比,EPS系统具有诸多优势。
基于AMESim-simulink仿真对混合动力汽车感应电机控制系统性能的研究
f 碍 ,+ o 【 , +一jd ’- 0 n
=
.
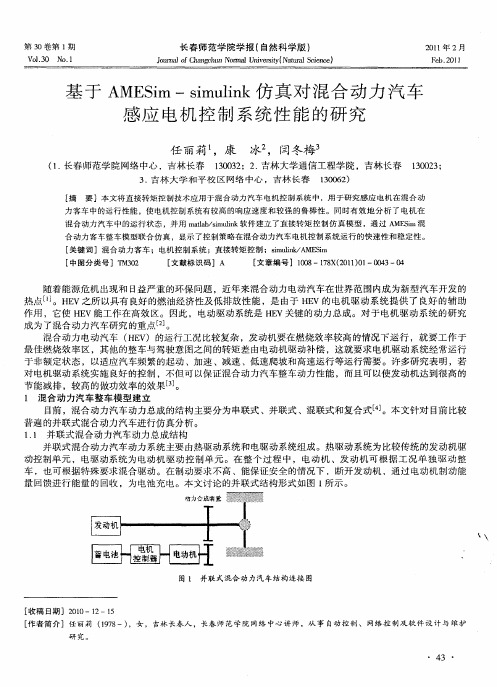
目前 ,混 合动 力汽 车动 力总成 的结 构主要 分为 串联式 、并 联式 、混联 式 和复合式 L。本文 针对 目前 比较 4 ] 普遍 的并联 式 混合 动力 汽车进 行仿 真分 析 。 1 1 并联 式混 合动 力汽 车动力 总成 结构 . 并联式 混 合动力 汽 车动力 系统 主要 由热驱 动系 统和 电驱 动系统组 成 。热驱 动系统 为 比较传 统 的发 动机驱 动控 制单元 ,电驱 动系统 为 电动机 驱 动 控制 单 元 。在 整 个 过程 中 ,电动 机 、发 动 机可 根 据 工 况 单 独 驱 动整 车 ,也可 根据 特殊 要求 ? 合驱 动 。在制 动要求 不高 、能保 证安 全 的情况下 ,断开发 动机 ,通过 电动机制 动能 昆 量 回馈进行 能 量 的 回收 ,为 电池充 电 。本 文讨 论 的并 联式 结构 形式 如 图 l 示 。 所
[ 中图分类号]T 0 M32
[ 文献标识码】A
[ 文章编号]10 —18 (0 10 — 0 3 4 0 8 7 X 2 1)1 04 —0
随着 能源 危机 出现 和 日益 严重 的环保 问题 ,近 年来? 合动 力 电动汽 车在世 界范 围 内成 为新 型汽 车开 发 的 昆 热点 n 。H V之所 以具有 良好 的燃 油经 济性及 低排 放性 能 ,是 由于 H V的 电机 驱 动 系统 提 供 了 良好 的 辅助 ] E E 作 用 ,它使 H V能工 作在 高效 区 。因此 ,电动 驱动 系统是 H V关键 的 动力 总成 。对 于 电机 驱 动 系统 的研 究 E E 成 为 了混合 动 力汽 车研究 的重 点 J 。 混合 动力 电动 汽车 ( E )的运行 工况 比较 复杂 ,发 动机要 在燃烧 效率 较高 的情况 下运 行 ,就 要 工作 于 HV 最佳 燃烧 效率 区 ,其他 的整 车与 驾驶意 图之 间的转 矩差 由 电动机驱 动补偿 ,这 就要求 电机 驱动 系统 经常 运行 于非 额定 状态 ,以适应 汽 车频 繁 的起 动 、加速 、减 速 、低 速爬 坡和 高速运 行等 运行需 要 。许多 研究 表 明 ,若 对 电机驱 动 系统实 施 良好 的控 制 ,不但 可 以保 证混合 动 力汽 车整车 动力性 能 ,而且可 以使 发动 机达 到很 高 的 节能 减排 ,较 高 的做功 效率 的效果 3。 l 混 合动 力汽 车整 车模 型建立
基于AMESim和Simulink的汽车电动助力转向系统的联合仿真
2008年6月第36卷第6期机床与液压MACH I N E T OOL &HY DRAUL I CSJun 12008Vol 136No 16收稿日期:2007-09-03基金项目:四川省重点学科重点实验室建设项目(Z01336)作者简介:王康康(1981—),男,浙江浦江人,在读研究生,主要研究方向:汽车电子控制技术。
电话:013550397278,E -mail:p jcucu mber@1631com 。
基于A MESim 和Simulink 的汽车电动助力转向系统的联合仿真王康康,唐岚,黎长青(西华大学交通与汽车工程学院,成都610039)摘要:以研究电动助力转向系统的助力控制模式的跟踪性能和轻便性为目的,在AMESi m 和Si m ulink 平台上创建了电动助力转向系统联合仿真模型。
仿真结果表明,所设计的P I D 控制算法使电动助力转向系统具有良好的跟踪性能和轻便性。
仿真结果为电动助力转向控制系统的设计提供了依据。
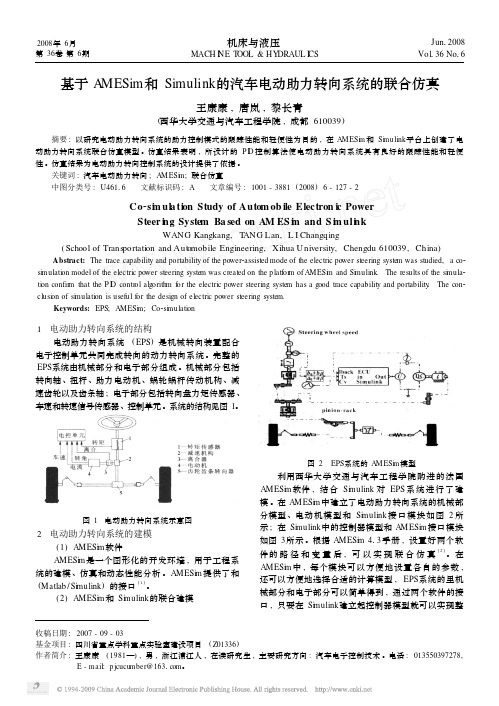
关键词:汽车电动助力转向;AMESi m ;联合仿真中图分类号:U46116 文献标识码:A 文章编号:1001-3881(2008)6-127-2Co 2si m ul a ti on Study of Autom ob ile Electron i c PowerSteer i n g System Ba sed on AM ES i m and S i m uli n kWANG Kangkang,T ANG Lan,L I Changqing(School of Trans portati on and Aut omobile Engineering,Xihua University,Chengdu 610039,China )Abstract:The trace capability and portability of the power 2assisted mode of the electric power steering syste m was studied,a co 2si m ulati on model of the electric power steering syste m was created on the p latfor m of AMESi m and Si m ulink .The results of the si m ula 2ti on confir m that the P I D contr ol algorith m f or the electric power steering syste m has a good trace capability and portability .The con 2clusi on of si m ulati on is useful f or the design of electric power steering syste m.Keywords:EPS;AMESi m ;Co 2si m ulati on1 电动助力转向系统的结构电动助力转向系统(EPS )是机械转向装置配合电子控制单元共同完成转向的动力转向系统。
基于AMESim的EHPS系统的仿真及试验研究
基于AMESim的EHPS系统的仿真及试验研究
王乔
【期刊名称】《汽车零部件》
【年(卷),期】2015(000)003
【摘要】基于AMESim软件建立了电动液压助力转向(EHPS)系统的仿真模型,制定控制策略、导入样机参数运行仿真,仿真结果证明该EHPS系统可使车辆低速行驶转向时转向轻便以及高速行驶转向时有合适的路感反馈.结合仿真结果,搭建试验台架并进行试验,证明台架试验与仿真结果一致.
【总页数】4页(P29-32)
【作者】王乔
【作者单位】重庆交通大学,重庆400074
【正文语种】中文
【相关文献】
1.基于AMESim的5070TSLF4扫路车行走系统仿真与试验研究 [J], 林初仁
2.基于ADAMS和AMESim的泵送系统联合仿真与试验研究 [J], 贾剑峰;田润利;林涛;丁礼磊
3.基于AMESim的5070TSLF4扫路车行走系统仿真与试验研究 [J], 林初仁
4.基于AMESim工程车辆变速器电液控制系统的仿真与试验研究 [J], 王硕;田晋跃;徐刚
5.基于AMESim的旋耕机自动调平系统仿真分析与试验研究 [J], 吴帆;蒋蘋;胡文武;金生;陈庚
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AMESim的新型电子真空助力器的研究

基于AMESim 的新型汽车电子真空助力器系统的研究摘要:本文运用AMESim 软件辅助开发一款用于乘用车的新型电子真空助力器产品。
利用该软件的气动、机械、电磁等基本元件库建立产品的原理模型,同时结合信号元件库搭建一个简单的PID 产品控制模块。
通过仿真结果表明,AMESim 软件可以比较精确的仿真出本产品系统的基本特性,对深入研究及产品优化工作起到积极作用。
关键词:真空助力器;汽车电子;AMESim 软件;系统仿真电子真空助力器(Electronic V acuum Booster ,以下简称EVB )主要应用于车辆主动安全纵向控制系统,提高车辆主动安全性能,降低车辆追尾等纵向碰撞交通事故。
在车辆系统中配合相应的电子控制单元及传感器系统,能够开发出自适应巡航、车辆停-走、电子稳定性控制、主动避撞、坡路防退、电子驻车、自动泊车、自动驾驶等先进功能系统。
也就是说,EVB 以应用到任何需要主动控制制动系统的车辆中,实现智能驾驶的线控制动功能(Brake by wire )。
本产品是现今汽车制动系统实现快速、稳定的电控制动的最佳技术方案之一。
本文运用AMESim 软件建立系统模型,结合实际产品参数及试验数据,对自主研发产品提供理论依据及系统优化和产品集成。
1 EVB 系统模型原理汽车真空助力器是由控制阀及带有真空单向阀的真空伺服气室组成。
它由发动机的进气歧管为其提供真空源,利用负压来增补司机施加于制动踏板上的力的部件。
位于制动踏板与制动主缸之间,其前端与制动主缸组合成一个整体;其后面借控制阀推杆后的调整叉与制动踏板机构相连。
助力最大伺服力F 计算公式:1)()(150−•+−+−−=K F K J f S a A P F P (1) 式中, 5a 推杆断面的面积(2m );A 腊片有效面积(2m );m D 主缸直径(m);P S 回位弹簧力(N);f 阀柱活塞滑动阻力(N);J 跳跃力(N),由试验而定的常数;K 助力比。
基于AMESim和RecurDyn的履带车转向系统联合仿真分析

和 转 向 系统 的 液 压 系统 ; 通 过 两种 软 件 的对 接 , 实现 履 带 车 转 向 系统 的机 械 一液 压 联 合 仿 真 。运 用 联 合 仿 真 方 法 ,
分析 了履 带车原地转 向时转向液压缸 的液压特性 变化情况。通过试验验证 , 试验 数据与仿 真结果非常接近 ; 表 明联 合仿真模 型的可靠性 , 为后期 系列产品 的设计制造提供 可靠数 据。
AMES i m s o f t wa r e,a c c o r di ng t o t h e wo r ki n g pr i n c i p l e o f s t e e r i ng s y s t e m o f a r t i c ul a t e d t r a c ke d ve hi c l e .I t c a n r e a l i z e c o n— bi n e d me c h a n i c a l — hy dr a u l i c s i mu l a t i o n o f t h e s t e e r i n g s ys t e m O H t hi s p l a t f o r m . Hy d r a ul i c c h a r a c t e r i s t i c s c h a n g e o f s t e e r i n g h y dr a ul i c c y l i nd e r wa s a n a l y z e d a s t he t r a c ke d v e hi c l e p i v o t s t e e r i n g b y t h e c o — s i mu l a t i o n t e c h n o l o g y. Ex p e r i me n t s h o we d
基于AMESim中Modelica模块的汽车电动助力转向系统仿真

基于AMESim中Modelica模块的汽车电动助力转向系统仿真周爱国;王闻莉;陆亮;周治平;高卫民;戴轶【期刊名称】《机床与液压》【年(卷),期】2011(39)11【摘要】The development of modem products needs the support of multi-domain modeling and simulation tools. The superiority of AMESim/Modeliea module in multi-domain system-level modeling and simulation was analyzed. By example of the electric power steering system (EPS), the system model was established in AMESim by bond graphic physics modeling, and some models were replaced by the models edited by Modeliea the multi-domain simulation modeling, and the influence of the system parameters on the steering performance in steering process was analyzed. The simulation results show that the EPS system model built by AMESim/Modeliea module is easily readable, and the sub-model edited by Modelica is easily reused, and it is a visual and easily operating system design method.%现代产品的开发需要多领域建模仿真工具支持.分析了AMESim/Modelica模块在多领域系统级建模仿真方面的优势.以汽车电动助力转向系统(EPS)为例,采用图形化物理建模方式在AMESim中建立了系统模型,并用多领域统一仿真建模语言Modelica编写的模型替换了部分模型,分析了转向过程中系统参数对转向性能的影响.仿真结果表明:AMESim/Modelica模块建立的电动助力转向系统模型的可读性好,同时Modelica建立的子模型重用性好,该方法是一种直观化、易操作的设计方法.【总页数】5页(P91-94,87)【作者】周爱国;王闻莉;陆亮;周治平;高卫民;戴轶【作者单位】同济大学机械工程学院,上海201804;同济大学机械工程学院,上海201804;同济大学机械工程学院,上海201804;同济大学机械工程学院,上海201804;上海汽车集团股份有限公司技术中心,上海201804;上海汽车集团股份有限公司技术中心,上海201804【正文语种】中文【中图分类】U463.44;TP391.1【相关文献】1.基于AMESim软件的汽车起重机起升机构液压系统仿真分析 [J], 聂笃伟2.基于AMESim和Simulink的汽车电动助力转向系统的联合仿真 [J], 王康康;唐岚;黎长青3.基于AMESim的燃料电池汽车储氢系统仿真 [J], 刘冬安; 陈俊超; 蔡吉闽4.基于AMESim固定式汽车拆解机液压系统仿真分析 [J], 方泰兴; 宋崇智; 黄军; 焦尚兵5.基于分层式协调控制的汽车电动助力转向与防抱制动系统仿真 [J], 陈无畏;初长宝因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ZF Lenksysteme GmbHThe Use of AMESim to Model Electromechanical Power Steering (EPS) SystemsBernd RommelZF Lenksysteme GmbH Schwäbisch Gmünd, Germany© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCM10.04.2006 1 ETC06014.pptContents Table of Contents• The EPSapa Steering System • Overview • Basic Concept • Simulation Model • Components • Sensor Signals • Implementation of ECU Code • Code Handling • Parameter Handling • ECU Testing • Model Verification • ECU Testing • System Testing and Optimization • Conclusion© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved. 10.04.2006 2 ETC06014.pptAbt.: ETCMContents Table of Contents• The EPSapa Steering System • Overview • Basic Concept • Simulation Model • Components • Sensor Signals • Implementation of ECU Code • Code Handling • Parameter Handling • ECU Testing • Model Verification • ECU Testing • System Testing and Optimization • Conclusion© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved. 10.04.2006 3 ETC06014.pptAbt.: ETCMEPS APA System ZFLS - Servolectric® - EPSapa (Axis Parallel Activated)Function: • • • • Motor mounted parallel to the rack Transmission by belt drive and Transmission by ball and nut gear Steering torque sensor mounted at pinionAdvantages: • • • • • High efficiency of ball and nut gear High efficiency of belt drive High rack forces possible Compact and robust design Low noise emissions© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCM10.04.2006 4 ETC06014.pptEPS APA System Basic DesignMotor Belt Drive Pinion Yoke ECU Housing Hand Wheel TeethRackTorque Sensor Screw Shaft Ball Screw Input Shaft© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCM10.04.2006 5 ETC06014.pptContents Table of Contents• The EPSapa Steering System • Overview • Basic Concept • Simulation Model • Components • Sensor Signals • Implementation of ECU Code • Code Handling • Parameter Handling • ECU Testing • Model Verification • ECU Testing • System Testing and Optimization • Conclusion© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved. 10.04.2006 6 ETC06014.pptAbt.: ETCMEPSapa Simulation Model Main Components for SimulationTorque Sensor Unit Rack & Pinion GearTransmissionECUPMSM10.04.2006 7 ETC06014.ppt© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCMEPSapa Simulation Model AMESim ModelECU Steering Column with Universal Joints MotorTorque Sensor Rack & Pinion Gear YokeReduction GearExternal Load Rack© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved. Abt.: ETCM 10.04.2006 8 ETC06014.pptEPSapa Simulation Model Signal InterfacesInternal interfaces Steering Torque Sensor External interfacesIgnition Steering Wheel AnglePMSM Motor Microcontroller SoftwareCAN • Engine Speed • Vehicle Speed Power supply • DiagnosisMotor Positioning Sensor Temperature Control© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCM10.04.2006 9 ETC06014.pptEPSapa Simulation Model Signal InterfacesECU Level 1 Functions Vehicle SpeedPower Supply PMSM Motor Motor Speed SensorSteering Wheel Angle Sensor Steering Torque Sensor© Alle Rechte bei ZF Lenksysteme GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. All rights reserved.Abt.: ETCM10.04.2006 10 ETC06014.pptContentsTable of Contents•The EPSapa Steering System•Overview•Basic Concept•Simulation Model•Components•Sensor Signals•Implementation of ECU Code•Code Handling•Parameter Handling•ECU Testing•Model Verification•ECU Testing•System Testing and Optimization•ConclusionFunction DevelopmentECU Code HandlingSimulation model and hardware sharethe same code!Simulation EnvironmentAMESimHardware TestingVehicle Testing Test BenchVehicleVehicle Application and System TuningUsing ETAS INCAExport ApplicationVehicleExcel Parameter Importand TuningParameter Import, Tuning and Export for Simulation using ExcelAMESim Model using original Code and ParametersExport for SimulationExport ApplicationVehicleExcel Parameter Importand TuningSimulation model and hardware share the same application parameters!AMESim ModelContentsTable of Contents•The EPSapa Steering System•Overview•Basic Concept•Simulation Model•Components•Sensor Signals•Implementation of ECU Code•Code Handling•Parameter Handling•ECU Testing•Model Verification•ECU Testing•System Testing and Optimization•ConclusionECU TestingInput signals fromvehicle measurement•torque sensor•steer angle•motor speed•vehicle velocityOutput Signals forComparison•ECU target torqueModel verifiedSystem TestingInput signals from vehicle measurement •steer angle velocity •rack force •vehicle speed Output Signals for Comparison•steering torque •torque sensor signal •ECU target torque •Motor speed steeringvelocityvehicle speedrack forcemotor speedECUtargettorquetorquesensorsignalsteering torqueSystem TestingVehicle Test: Steering VelocitySinus steering with constant steering wheel angle and increasing steering velocitySystem OptimizationEarly development stage and prototype testing•Vehicle testing•Detection of discontinuous steering torque •Simulation:•Pinpointing the problem•Identification and optimization of critical parametersContentsTable of Contents•The EPSapa Steering System•Overview•Basic Concept•Simulation Model•Components•Sensor Signals•Implementation of ECU Code•Code Handling•Parameter Handling•ECU Testing•Model Verification•ECU Testing•System Testing and Optimization•ConclusionConclusion•The EPSapa System of ZFLS has been introduced•A simulation model of the system has been derived•A method to implement controller functions and application parameters into the ZFLS simulation environment has been shown, making parameter and system tuning possible•ECU Functions developed by software engineers can be tested and evaluated •Measurements conducted on a test bench or in the vehicle can be reproduced by simulation models•System evaluation and optimization, as well as stability and sensitivity analysis of EPS systems are performedThank you for your Attention !。