基于ARM的机械手运动控制系统设计
基于ARM处理器的钻孔机械臂控制系统.

基于ARM处理器的钻孔机械臂控制系统工业机械臂是近代自动控制领域中出现的一项新技术,作为多学科融合的边沿学科,它是当今高技术发展最快的领域之一,并已成为现代机械制造生产系统中的一个重要组成部分。
所谓工业机械臂是一种能按给定的程序或要求自动完成物件(如材料、工件、零件或工具等)传送或操作作业的机械装置,它能部分地代替人的手工劳动。
较高级型式的机械臂,还能模拟人的手臂动作,完成较复杂的作业。
本课题所研究的机械臂是用于在工业生产上钻孔的机械设备。
它可根据预先给定的任务,用编程的方式规定好机械臂要行进的路线,自动完成其行为控制,完成整个生产过程中的钻孔工作。
本论文中的主要工作涉及以下方面:(1)以钻孔机械臂为研究对象,进行了以LPC2138为主控制器的嵌入式系统硬件平台设计,以及LPC2138与伺服驱动电路、液晶显示电路、键盘扫描电路等的接口设计,且着重对机械臂执行机构交流伺服电机的驱动进行了设计研究;(2)针对μC/OS-II操作系统精小、稳定、可靠、易移植等特点,对μC/OS- II操作系统进行修改,并移植到主控制系统的处理器中。
在操作系统之上,将机械臂的任务模块划分为:主程序模块、键盘扫描和液晶显示任务模块、传感器采集和控制信号发送任务模块、脉冲指令与方向信号发送任务模块,并设计出应用程序,将各部分整合到一起完成机械臂定位和钻孔工作。
(3)论文中应用模糊控制算法,用于控制和调节机械臂的钻孔工作。
且对常规PID控制与模糊控制进行了仿真对比,选择了最优控制方案,使系统提升钻孔定位的响应时间,快速到达钻孔的目标,同时移动速度快且不超调。
在论文的最后,给予了简要的总结和展望。
同主题文章[1].武屹. 嵌入式系统在家居智能领域的应用' [J]. 科技创新导报. 2009.(19)[2].张腾飞,顾亦然,王瑾. 电气类专业嵌入式实践教学内容与方法的改革探索' [J]. 中国电力教育. 2009.(14)[3].Altium发布最新智能开发环境,无需编写HDL即可开发FPGA' [J]. 中国电子商情(基础电子). 2009.(10)[4].李精华,李兴富. 嵌入式技术人才需求分析' [J]. 桂林航天工业高等专科学校学报. 2009.(03)[5].柴政. 基于Internet远程控制的智能家居系统' [J]. 电脑知识与技术. 2009.(25)[6].纪艳侠,周士欣,范卫国. 嵌入式的住宅小区智能门禁管理系统的设计'[J]. 科技创新导报. 2009.(30)[7].樊晓兵. 基于DSP+ARM的双核结构数字视频监控系统设计' [J]. 吉首大学学报(自然科学版). 2009.(02)[8].赵波,秦涛,张新有. 嵌入式防火墙规则冲突检测算法的实现' [J]. 实验科学与技术. 2009.(06)[9].肖杰,曾玢石,赵晋琴. 一种嵌入式Web服务器的设计与实现' [J]. 湖南第一师范学报. 2009.(06)[10].“嵌入式系统专家委员会”拟在电子学会设立' [J]. 电子产品世界. 2006.(09)【关键词相关文档搜索】:控制理论与控制工程; 钻孔机械臂; LPC2138; 嵌入式系统; μC/OS- II; 伺服电机【作者相关信息搜索】:江西理工大学;控制理论与控制工程;王祖麟;郑珊珊;。
基于运动控制芯片的机械手控制系统设计
基于运动控制芯片的机械手控制系统设计
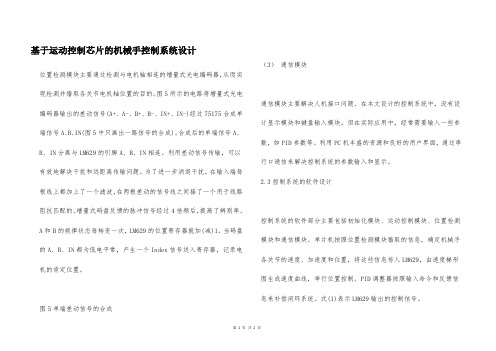
位置检测模块主要通过检测与电机轴相连的增量式光电编码器,从而实现检测并猎取各关节电机轴位置的目的。
图5所示的电路将增量式光电编码器输出的差动信号(A+、A-、B+、B-、IN+、IN-)经过75175合成单端信号A、B、IN(图5中只画出一路信号的合成)。
合成后的单端信号A、B、IN分离与LM629的引脚A、B、IN相连。
利用差动信号传输,可以有效地解决干扰和远距离传输问题。
为了进一步消退干扰,在输入端每根线上都加上了一个滤波,在两根差动的信号线之间接了一个用于线路阻抗匹配的。
增量式码盘反馈的脉冲信号经过4倍频后,提高了辨别率。
A和B的规律状态每转变一次,LM629的位置寄存器就加(减)1。
当码盘的A、B、IN都为低电平常,产生一个Index信号送入寄存器,记录电机的肯定位置。
图5单端差动信号的合成(3)通信模块
通信模块主要解决人机接口问题。
在本文设计的控制系统中,没有设计显示模块和键盘输入模块。
但在实际应用中,经常需要输入一些参数,如PID参数等。
利用PC机丰盛的资源和良好的用户界面,通过串行口通信来解决控制系统的参数输入和显示。
2.3控制系统的软件设计
控制系统的软件部分主要包括初始化模块、运动控制模块、位置检测模块和通信模块。
单片机按照位置检测模块猎取的信息,确定机械手各关节的速度、加速度和位置,将这些信息传入LM629,由速度梯形图生成速度曲线,举行位置控制。
PID调整器按照输入命令和反馈信息来补偿闭环系统。
式(1)表示LM629输出的控制信号。
第1页共2页。
基于ARM的自主移动机器人控制系统设计
基于ARM的自主移动机器人控制系统设计陈剑斌;田联房;王孝洪【摘要】自主移动机器人是近年来研究热点,基于三节履带式机器人机械结构,提出了以ARM架构微处理器s3c2410为核心、多传感器的自主移动机器人控制系统,采用了Linux嵌入式操作系统作为S3c2410软件开发平台.微处理器外部扩展数字电路采用了CPLD来实现,减少了外围分立元件的使用及PCB面积,可靠性高、抗干扰能力强;基于Verilog语言对CPID进行了设计与实现.ARM与CPLD采用ISA总线方式通信,整个控制系统具有良好的可扩展性、硬件可裁剪性.通过爬楼梯、避障等实验,验证了机器人具有良好的自主移动性能.%Autonomous mobile robot is a new hot in recent years. A control system for autonomous mobile robot is proposed based on the mechanical structure of three tracked robot using ARM microprocessor S3c2410 as core with multi-sensors. Embed OS-Linux is adopted as a development platform for S3c2410 software.And the external expended distal circuits of microprocessor are realized by CPLD which program is designed by Verilog HDL,which reduces the use of external discrete components and PCB area,with high reliability and anti-interference ability.ARM communicates with CPLD by ISA bus, so the control system is of well scalability and pruning of hardware. The robot was tested by experiments such as climbing stair, avoiding obstacle, etc.to be good with autonomous mobility.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)006【总页数】3页(P160-162)【关键词】自主移动机器人;多传感器;控制系统;ARM;CPLD【作者】陈剑斌;田联房;王孝洪【作者单位】华南理工大学,自动化学院,广州,510640;华南理工大学,自动化学院,广州,510640;华南理工大学,自动化学院,广州,510640【正文语种】中文【中图分类】TH16;TP2421 引言自主移动机器人是近年来研究热点,现今大多数移动式机器人存在越野能力差、自主性不够强、控制系统速度低或者占用空间大、功耗高、处理数据有限等缺点,满足不了高性能小型自主移动机器人的需求。
机械手(臂)旋转动作驱动控制系统的设计

分类号密级UDC学位论文机械手(臂)旋转动作驱动控制系统的设计作者姓名:关晓斌指导教师:王丹副教授东北大学机械工程与自动化学院申请学位级别:硕士学科类别:专业学位学科专业名称:机械工程论文提交日期:2006年7月论文答辩日期: 2006年8月27日学位授予日期:答辩委员会主席:评阅人:东北大学2006年6月A Dissertation in Mechanical EngineeringDrive System Design for Rotary Motion ofMechanical Hand(Arm)By Guan XiaoBinSupervisor:Vice Professor Wang DanNortheastern UniversityJune 2006独创性声明本人声明,所呈交的学位论文是在导师的指导下完成的。
论文中取得的研究成果除加以标注和致谢的地方外,不包含其他人己经发表或撰写过的研究成果,也不包括本人为获得其他学位而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均己在论文中作了明确的说明并表示谢意。
学位论文作者签名:日期:学位论文版权使用授权书本学位论文作者和指导教师完全了解东北大学有关保留、使用学位论文的规定:即学校有权保留并向国家有关部门或机构送交论文的复印件和磁盘,允许论文被查阅和借阅。
本人同意东北大学可以将学位论文的全部或部分内容编入有关数据库进行检索、交流。
(如作者和导师不同意网上交流,请在下方签名;否则视为同意。
)学位论文作者签名:导师签名:签字日期:签字日期:东北大学硕士学位论文 摘要 机械手(臂)旋转动作驱动控制系统的设计摘要20世纪40年代后期,美国在原子能实验中,首先采用机械手搬运放射性材料﹐人在安全室操纵机械手进行各种操作和实验。
50年代以后,机械手逐步推广到工业生产部门,用于在高温﹑污染严重的地方取放工件和装卸材料,也作为机床的辅助装置在自动机床﹑自动生产线和加工中心中应用,完成上下料或从刀库中取放刀具并按固定程序更换刀具等操作。
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
仿人机器手臂运动控制系统设计及性能分析

仿人机器手臂运动控制系统设计及性能分析摘要:现代机器人技术的发展已经深入到各个领域,其中机器人手臂的运动控制系统在工业自动化、医疗辅助和日常生活等方面起到了重要的作用。
本文旨在设计和分析一种仿人机器手臂的运动控制系统,通过对系统的设计和性能分析,探讨其在实际应用中的优势和局限性。
1.引言随着科技的不断进步,机器人技术已经成为了现代社会中不可或缺的一部分。
机器人手臂作为机器人系统的关键部件之一,其运动控制系统的设计与性能分析显得尤为重要。
仿人机器手臂的运动控制系统可以使机器手臂更加智能化、灵活化,更好地模仿人类手臂的运动方式,适应各种复杂的任务需求。
2.手臂运动控制系统的设计2.1 控制算法的选择在仿人机器手臂的运动控制系统设计中,控制算法的选择是一个关键性的决策。
常用的控制算法包括PID算法、模糊控制算法和神经网络控制算法等。
在选择控制算法时,需要考虑系统的实际应用需求、控制精度和实时性等因素。
2.2 动力学模型的建立仿人机器手臂的运动控制系统需要建立相应的动力学模型来描述手臂的运动规律。
动力学模型的建立可以通过采集手臂的运动数据,使用逆运动学方法或者基于力/力矩的方法进行建模。
建立合理的动力学模型是实现精确控制的前提。
2.3 传感器的选择与布置在仿人机器手臂的运动控制系统中,传感器的选择与布置是至关重要的。
传感器能够提供机器手臂所需要的外部环境信息,如位置、力、速度等,并将这些信息反馈给控制系统进行相应的调节。
常用的传感器包括位置传感器、力传感器和视觉传感器等。
3.性能分析3.1 运动精度分析仿人机器手臂的运动精度是衡量其性能优劣的重要指标之一。
通过对机械结构的优化和控制算法的改进,可以提高手臂的运动精度,使其更加准确地执行各种任务。
3.2 运动速度分析仿人机器手臂的运动速度也是性能分析的一个关键指标。
较高的运动速度可以提高工作效率,但也需要考虑手臂的稳定性和安全性。
优化控制算法和增加输出功率可以实现更快的运动速度。
基于单片机的机械手臂控制系统设计

基于单片机的机械手臂控制系统设计程金明(江西科技学院,江西 南昌 330098)摘 要:在机械手臂控制系统设计中,运用单片机能增强机械手臂的使用性能。
基于此,文章详细阐述了硬件系统设计、软件系统设计、系统调试这三个单片机机械手臂控制系统设计环节,深入分析了基于单片机控制系统的机械手臂设计,希望为机械自动化领域的发展提供助力。
关键词:机械手臂;仿真调试;单片机中图分类号:TM383.6 文献标志码:A 文章编号:1672-3872(2020)16-0104-02——————————————作者简介: 程金明(1976—),男,江西南昌人,本科,讲师,研究方向:电工电子技术,单片机技术。
单片机是一种具有中央处理器CPU、随机存储器RAM 等多项功能的集成电路硅芯片,其在能效上相当于一个微型的计算机系统。
人们将其应用到机械手臂设计中,能有效提升控制系统的运行水平,工作者需要深入分析基于单片机的控制系统设计,优化机械手臂的使用性能。
1 硬件系统设计1.1 单片机控制装置设计从整体上看,单片机作为核心控制装置,在机械手臂控制系统的运作中起到了重要作用,工作者需要根据实际需求,合理设置单片机装置结构,保证机械手臂核心控制机制的运行效果。
一般来说,单片机包含运算器、控制器、寄存器这三个运作部件,其中运算器负责算术、逻辑运算,控制器负责运行决策,而寄存器则负责与外界设备交换信息,设计者应基于此,选择相应的设计方案,来平衡各项运行功能的落实效果。
就目前来看,设计者可以直接选用80C51单片机,并利用其具备的12MHz 晶振频率,来满足机械手臂运作系统对数据采集、时间精度等方面的要求,同时,设计者还要将石英晶体振荡电路,接入XTALI、2端口。
待电路复位后,将RST 端口接入,并连接LM016L 与P0.0-7端口,还要为该途径配备电阻,以确保LCD 显示器能清晰显示出指令代码。
1.2 舵机系统装置设计在机械手臂的控制系统硬件机制中,舵机系统是指由无核心马达、电路板、齿轮、位置检测器等部件构成的位置伺服驱动装置,该装置可以基于从单片机、接收机处获取的信号,利用自身产生的1.5ms 宽、周期20ms 的基准信号,以及位置检测器来核查机械手臂是否到达定位。
浅谈基于单片机的机械手臂控制系统设计

浅谈基于单片机的机械手臂控制系统设计摘要】随着我国近几年来工业化生产水平的不断提高,当前很多大型企业在进行产品生产过程当中,都会将机械手臂应用到产品加工和产品生产中。
而且机械手臂已经成为了当前自动化生产线中的重要组成部分。
随着自动化技术的不断发展,机械手臂的研究与设计工作也在不断的进行但是当前很多企业在进行机械手臂应用过程当中,仅仅只重视机械手臂,如何科学合理的设计却忽略了机械手臂控制系统的设计,因此,本文将会就基于单片机的机械手臂控制系统设计进行分析。
【关键词】单片机机械手臂控制系统设计研究与分析机械手臂是当前我国自动化技术发展过程当中重要的产品。
而且在自动化技术整体发展过程当中,机械手臂的应用,标志着我国当前企业的生产技术生产技术,生产水平迈入了全新的阶段。
而且随着机械手臂的出现,我国当前大部分企业的生产流程,生产技术,生产规划都发生了重大的改变。
很多企业在进行产品生产过程当中,开始运用自动化流水线,对于我国当前的企业而言,属于一种全新的生产方法,它不仅有效地解放了人力,也节约了很多物力与财力,提高了企业的产品生产效率和产品生产质量。
但相对于国外的自动化技术而言,我国当前的自动化技术在发展过程当中仍然存在一些没有解决的问题,其中就包括机械手臂的控制系统设计。
机械手臂控制系统设计工作的开展,是当前很多企业正在深入开展的重要工作,只有针对自动化生产线当中的自动化机械手臂进行控制系统设计,才能够更好的保证生产精度。
一、设计方案在进行机械手臂控制系统设计过程当中,首先要针对机械手臂控制系统内部的硬件结构进行详细的设计,其次针对软件结构进行设计,再进行硬件结构和软件结构设计,完成之后要开展仿真模拟实验。
实际上,机械手臂控制系统是由机械系统和电气系统共同组成的。
而我国当前很多企业在进行机械手臂应用过程当中,针对机械手臂控制系统的设计时,所选择的控制单元是运用单片机进行控制。
有的企业则是运用PLC对机械手臂的应用进行控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MHz,拥有单周期乘法和硬件除法,处理速度快.此 外,该芯片拥有8个定时器,其中2个为系统定时 器,可以用作系统定时,其余的6个定时器都可以用 于发送脉冲或者对外部输入脉冲进行计数.这里所 用的机械手为笛卡尔型三轴空间直角坐标机械手, 需要三个定时器发送脉冲,同时需要三个定时器接 收编码器反馈信号,所以STM32F103ZET6芯片刚 好满足要求. 伺服系统包含两部分:伺服电机和伺服驱动器.
planning and position
control were programmed.The experimental results show that the manipulator motion control designed is
convenient
for operation.The
are
第42卷第3期 2014年6月
浙江工业大学学报
JOURNAL OF ZHEJIANG UNIVERSITY OF TECHN01,OGY
V01.42 No.3 Jun.2014
基于ARM的机械手运动控制系统设计
徐建明。张健,吴世民。俞立
(浙江工业大学信息工程学院,浙江杭州310023)
摘要:从机械手的机械结构和工作原理出发,研制了三轴伺服机械手的运动控制系统,设计了基于 STM32F103ZET6芯片的控制器和触摸屏控制界面,提出了位移与脉冲数转换、运行速度与脉冲频率 转换及位置控制算法,编写了节点示教、轨迹规戈『j、速度规划和位置控制程序.实验结果表明:所设计 的机械手运动控制系统操作方便,实现了机械手运动的示教、轨迹规划、速度规划和位置控制功能. 关键词:机械手;STM32;示教;轨迹规划;速度规划 中图分类号:TP23 文献标志码:A 文章编号:1006—4303(2014)03—0243—06
收稿日期:2013—09—03
量的、降低成本的和开发系列产品的,它具有运算处 理能力强、与PC通讯方便、成本低、针对应用优化 设计等方面的优势.这里采用STM32F103ZET6芯 片来设计控制器,所设计的伺服控制系统可保证机 械手高精度、高效率地运行.
1机械手结构、工作原理及运动控制系统
1.1结构及工作原理 该机械手由底座、机械手臂、手爪、伺服电机、行
第42卷
星减速器、光电开关及STM32控制部分组成嗍.机 械手共有三个自由度,动作由伺服电机驱动, STM32控制,可以完成手臂左右移动,手臂前后伸
圈口
X
展,手臂上下移动以及抓取工件等动作.机械手能准 确地抓取工件,并送到指定位置.机械手机械部分如 图1所示.
囝
圈
鼬
醋
一一 Ⅳ Z
』L
圈
1
上
z
l
必
Z
匦
(b)示教流程 图3程序流程图
Fig.3 The
(c)轨迹规划流程
image of the program flow
2.1.1初始化
手动示教界面中有节点选择和x,y,Z三轴的 运动方式选择,其具体流程如图3(b)所示.操作 时,首先选择节点,接着选择X,y,Z轴的运动方 式.当机械手运动到所需要位置,按下停止键,如 n
2.1.3
其中:F。。。为定时器输出频率;t为时钟预分频系 数;n为自动重载寄存器周期值;n为定时器的时 钟输入.STM32芯片的定时器时钟输入为72 MHz, 只需要合理地选择时钟预分频系数和自动重载寄存 器周期值,就可以确定所要发送的脉冲频率.
2.1.2 示
轨迹规划
教
示教结束之后就是轨迹规划环节,其界面如图 5所示.
2软件设计
2.1总体程序设计 硬件平台构建好后,根据机械手的基本功能要
万方数据
第3期
徐建明,等:基于ARM的机械手运动控制系统设计
求,在其基础上搭建系统的软件环境进而通过设计 好的算法来控制机械手并验证算法的效果.该程序
设计中包含3个环节:初始化、示教、轨迹规划,程序 流程图如3所示.
(a)总体流程
在人机界面中,设计了两个界面分别用于示 教[121和轨迹规划.系统启动后,首先判断是否示教, 如果需要,那么进入手动示教界面,如图4所示.
朋mm 节点1 节点2 节点3 节点4 节点5 节点6 节点7 节点8
0 5 10 15 20 30 40 50 y,mmZ/mm O 5 10 15 20 30 40 50 O 5 10 15 20 30 40 50
Abstract:Based
Oil
the
structure
and working principle of the manipulator,this paper
servo
not
only
developed the motion control system which used in the three axis designed the controller based
表2
Table 2
新数据表
mm 图6e of the data
(1+L)・(1+Td)
初始化包括:芯片的时钟初始化、定时器初始 化、中断初始化、编码器初始化、触摸屏初始化等.定 时器的脉冲频率设置公式为
F— “…
…
“7
果还有偏差,继续移动直至满意再按停止键.最后 按确定键,此时在选中的节点右侧显示机械手在 X,y,Z三个方向上的绝对距离,同时数据保存到 存储单元.如果需要重新记录该节点数据,即重新 选中该节点,然后将机械手示教到要求位置后,按 确定键.
on
manipulator,but also touch screen.In
STM32F103ZET6
and
control
interface of
addition,the conversion between displacement and the number of pulse,the conversion between
running speed and pulse frequency,and the algorithm of position control were put
forward.In
practice,the functions of
node teaching,trajectory planning,velocity
基金项目:国家自然科学基金资助项目(61374103);浙江省自然科学基金资助项目(LYl3F030009)
作者简介:徐建明(1970一)。男.江西吉安人,教授,博士,硕士生导师,研究方向为鲁棒控制、运动控制、机器人控制及其应用,E—mail:xujm
@ziu,,edu.en,
万方数据
浙江工业大学学报
Design of manipulator motion control system based
on
ARM
XU Jian—ming,ZHANG
(College of Information
Jian,WU
Shi—min,YU Li
Engineering,Zheiiang University of Technology,Hangzhou 310023,China)
整个控制系统的核心是基于ARM Cortex-M3 芯片的STM32的控制板,它经由脉冲输出端向伺 服驱动器发出定量的脉冲来控制伺服电机的转动. 这里选用的STM32F103ZET6芯片[1伊11],其内核是
ARM 32位的Cortex-M3 CPU,最高工作频率为72
来,并且通过触摸屏与后台的控制系统进行通信可 以修改参数,为用户提供良好的人机交互界面,简化 了对机械手现场的操作.这里选用迪文科技生产的 人机界面交互模组DWIN—HMI,它自身含有电源 模块、处理器、TFT屏、存储单元以及接口电路,内 部还包含了一整套的指令集.通过串口通信,控制板 可以将数据按固定的协议格式传到DWIN—HMI上 显示,而且用户在DWIN—HMI上的操作能迅速地 传到控制器上进行处理.
伺服驱动器
伺服驱动器根据输出端的脉冲输出数量和频率分别 控制伺服电机的转动圈数和转动速度,因而能够准 确地控制机械手的运行速度和距离.这里选用的是 台达ASDA—AB系列的伺服驱动器,其性价比高,操 作模式有位置模式、速度模式、扭矩模式、混合模式, 根据需要选定本次设计的操作模式为外部脉冲输入 位置模式.伺服电机与伺服驱动器相连,并通过一定 的机械结构(减速器和皮带)带动机械臂.选用EC- MA系列伺服电机,Z轴垂直于地面,如果手爪抓的 东西过重,在重力影响下机械手会沿z轴缓缓下 降,所以Z轴电机选用的是带刹车的伺服电机.由 于伺服电机带有自锁功能,考虑到成本和功能,X 轴与y轴选用普通伺服电机既能达到要求. 接口板的位置在控制板和伺服控制系统之间, 它的作用是对控制器信号和伺服控制器信号进行隔 离.接口板自带电源,控制板信号经过光耦转换成
表1
Table 1
段时间和减减速段的时间相等,均为T。,匀速运动 段时间为T。.
数据表
mm
The table of the data
一.-s.昌Ⅲ)\毯幽
轨迹规划是对示教节点进行操作,首先步骤选 择,然后节点选择,最后将数据存人新数据表,其形 式见表2.根据轨迹规划得到的新数据表,表示一条 轨迹,再现时,机械手按照运动顺序设定的步骤 运行.
y
(a)主视图
(b)左视幽
fcl俯税蚓
图l机械手结构简图
Fig.1 The
image of the structure of the manipulator
机械手每轴两端都有一个光电开关,用于设定 原点与限位.对于每个光电开关,在控制器中除了高 低电平外,还有边沿的变化,原点和限位可以通过这 两种变化确定.当电源开启时,机械手开始回原点, 原点定义为:x轴的最右端,y轴的最左端,z轴的 最下端.在机械手回原点动作时,光电开关是用来定 位的,其余的时候都用作限位,确保机械手的运行 害令 1.2运动控制系统 机械手控制系统主要由基于ARM Cortex-M3 的STM32的控制板、伺服系统、接口板和触摸屏组 成,如图2所示.