结构振动控制..
结构动力学中的振动控制技术

结构动力学中的振动控制技术结构动力学是研究结构在外界加载或激励下的响应行为,而振动控制技术则是一种可以减缓或抑制结构振动的技术手段。
本文将介绍结构动力学中的振动控制技术以及其应用领域。
一、被动控制技术被动控制技术是指通过使用吸振材料、摩擦阻尼器、负质量振子等被动装置来减少结构振动。
这些被动装置可以根据结构的振动状态自动进行调整,从而减少振动对结构的影响。
1. 吸振材料吸振材料是一种可以将振动能量转化为热能或其他形式能量的材料。
通过在结构中使用吸振材料,可以有效地降低结构的振动幅值。
2. 摩擦阻尼器摩擦阻尼器是一种通过摩擦阻尼力来抑制结构振动的装置。
它可以通过调整阻尼力大小来减少结构的振动,从而实现振动控制的目的。
3. 负质量振子负质量振子是一种通过在结构中加入具有负质量的振子来实现振动控制的装置。
它可以通过振子的动态特性来减少结构的振动。
二、主动控制技术主动控制技术是指通过在结构中加入传感器和执行器,利用控制算法对结构的振动进行实时控制。
主动控制技术可以根据结构的振动状态进行主动调控,进而实现精确的振动控制效果。
1. 传感器传感器可以用来实时监测结构的振动状态,并将振动信号传递给控制系统。
常见的传感器包括加速度计、位移传感器等。
2. 执行器执行器是主动控制技术中的关键部件,用于根据控制算法的指令对结构施加控制力。
常见的执行器包括电液伺服阀、电动液压马达等。
3. 控制算法控制算法是主动控制技术中的核心,通过对传感器获取的振动信号进行处理和分析,然后产生相应的控制指令驱动执行器对结构进行控制。
三、应用领域振动控制技术在工程实践中得到了广泛的应用,以下是一些典型的应用领域:1. 建筑结构振动控制通过振动控制技术可以减少建筑结构在地震、风载等外界激励下的振动,从而提高结构的抗震性能和舒适性。
2. 桥梁振动控制桥梁是工程中常见的结构形式,通过振动控制技术可以减少桥梁在行车、风载等激励下的振动,从而提高桥梁的安全性和使用寿命。
建筑结构振动控制与减震技术
建筑结构振动控制与减震技术建筑结构振动是指建筑物在受到外力作用或自身受到激励时产生的动态响应。
振动会带来很多问题,比如噪音、不稳定性和疲劳等。
为了保证建筑物的安全性和舒适性,振动控制和减震技术成为了十分重要的领域。
本文将介绍建筑结构振动控制与减震技术的原理与应用。
1. 介绍建筑结构振动的原因和影响建筑结构振动的主要原因包括地震、风载、人员活动以及机械设备等因素。
振动会导致建筑物的不稳定性,并对建筑内部设备和居住者产生不良影响,如噪音、疲劳等。
因此,对建筑结构振动进行控制和减震十分重要。
2. 振动控制的方法振动控制可以通过几种方法来实现,包括被动控制、主动控制和半主动控制。
被动控制利用刚性连接件、阻尼器等 passibe 部件来吸收和分散振动能量。
主动控制则通过传感器和激励器对振动进行主动干预和抑制。
半主动控制则结合了主动控制和被动控制的优点。
3. 减震技术的原理与应用减震技术通过在建筑物底部安装减震装置,将地震或其他外力引起的振动吸收并分散,从而减小建筑内部的振动幅度。
常见的减震装置包括摆锤、液体阻尼器和弹簧等。
这些装置可以减轻振动对建筑物的影响,提高建筑的抗震能力。
4. 案例分析以某高层建筑为例,介绍减震技术在实际工程中的应用。
该高层建筑采用液体阻尼器作为减震装置,通过改变液体的流动来吸收和消散振动能量。
该减震系统有效地提高了建筑物的稳定性和舒适性,并在地震发生时发挥了重要作用。
5. 进一步展望建筑结构振动控制与减震技术是一个不断发展和改进的领域,目前已经取得了很多成果。
未来的研究可以集中在材料和设计方面,开发更高效和经济的减震装置,提高建筑物的抗震和抗振能力。
总结:建筑结构振动对建筑物的安全性和舒适性产生重要影响。
振动控制和减震技术通过各种方法和装置来减小建筑物的振动幅度,提高其抗震能力。
这些技术在实际工程中已经取得了一些成功,并且仍在不断发展和改进。
未来的研究应该致力于提高减震装置的效率和经济性,进一步提升建筑物的抗振性能。
复杂结构体系的振动分析与控制
复杂结构体系的振动分析与控制随着复杂工程结构体系的不断发展,结构体系的振动问题也逐渐引起了人们的重视。
在工程实践中,振动问题对工程结构体系的安全性、可靠性和耐久性均有着不可忽视的影响。
因此,对于复杂结构体系的振动分析和控制具有重要的理论意义和实际应用价值。
一、复杂结构体系的振动分析复杂结构体系的振动问题主要包括结构固有频率、振型、振幅等多方面。
对于复杂结构体系的振动分析,通常采用有限元法、频域分析法和时域分析法等方法。
1. 有限元法有限元法是目前最为常用的一种结构振动分析方法,其基本思想是将整个结构体系离散化,通过分析每个单元的动力响应来计算整个结构体系的振动特性。
有限元法可以对结构体系的任何形状进行分析,具有较高的精度和可靠性。
但是,其计算过程比较复杂,需要大量的计算资源和时间。
2. 频域分析法频域分析法是将结构振动过程看作频率与振幅之间的关系,通过计算结构振动的频谱密度及振幅的峰值等参数来分析结构的动态响应特性。
该方法计算速度较快,可以对结构体系进行静态、动态和稳定性分析,但其结果并不精确。
3. 时域分析法时域分析法是通过计算结构振动过程中的时域变化规律来分析结构体系的动态响应特性。
该方法具有计算精度高、运算速度快等优点,但需要满足一些前提条件,如假设结构运动为线性、时间周期相等等。
二、复杂结构体系的振动控制结构振动控制是指通过采取某种措施来降低或消除结构振动的行为。
针对不同的振动问题,有着不同的控制措施。
1. 被动控制被动控制是指对结构进行一定形式结构改造,给结构增加某些被动装置来控制结构振动的方法。
常用的被动装置有质量阻尼器、支撑滞尼器、增振器和阻尼器等。
被动控制的主要优点是安装简单、使用成本低、稳定可靠,但是其控制性能差,不能有效地控制高频振动。
2. 主动控制主动控制是利用主动控制器激励一些控制原件来产生反馈力,消耗振动能量,达到控制结构振动的目的。
常用的主动控制技术有智能材料控制技术、电流传输线控制技术和阵列振荡器技术等。
建筑结构振动分析与控制研究
建筑结构振动分析与控制研究1. 引言建筑结构的振动是指结构在受到外界力的作用下发生的运动。
振动问题一直以来都是建筑工程中的一个重要课题,对于保证建筑结构的安全性、舒适性和耐久性至关重要。
本文将探讨建筑结构振动的分析和控制方法,以及相关研究进展。
2. 建筑结构振动分析2.1 建筑结构振动的分类建筑结构的振动可分为自由振动和强迫振动。
自由振动是指建筑结构在没有外界力作用下的自身振动,如地震、风荷载等;而强迫振动是指建筑结构受到外界力作用的振动,如机械设备运转等。
2.2 振动模态分析振动模态分析是一种常用的建筑结构振动分析方法。
它通过求解结构的固有振动频率和模态形状,得到结构的振动特性。
通常采用有限元法作为振动模态分析的数值计算方法,这种方法具有计算精度高、适用范围广等优点。
3. 建筑结构振动控制3.1 主动控制方法主动控制方法是指通过引入外界控制力来改变建筑结构的振动特性。
常见的主动控制方法包括质量和刚度变化法、控制杆法以及智能材料控制等。
这些方法能够实时调节建筑结构的振动特性,从而减小结构的振动响应。
3.2 被动控制方法被动控制方法是指通过在结构上添加附加物用以吸收或耗散振动能量,从而减小结构的振动响应。
常见的被动控制方法包括隔震、摆锤、液体阻尼器等。
这些方法通过改变结构的动力特性,降低结构与外界激励的耦合效应,从而减小结构的振动响应。
4. 建筑结构振动控制研究进展4.1 结构振动控制理论研究近年来,随着计算机技术和控制理论的不断发展,建筑结构振动控制研究取得了重要进展。
研究人员通过建立结构动力模型和振动控制模型,提出了一系列高效的振动控制算法和方法。
4.2 智能材料在振动控制中的应用智能材料在振动控制中具有重要的应用潜力。
形状记忆合金和压电材料等智能材料可以根据外界激励的变化自动调节其力学性能,从而减小建筑结构的振动响应。
研究人员通过开展智能材料在建筑结构振动控制中的应用研究,为解决建筑结构振动问题提供了新的思路和方法。
结构工程振动控制

结构工程振动控制振动是结构工程中一个重要的问题,当结构受到外力或内力作用时,会产生振动。
振动不仅会影响结构的稳定性和安全性,还会给人们的生活和工作带来很多不便。
因此,进行结构工程振动控制成为了当务之急。
本文将介绍几种常见的结构工程振动控制方法。
一、主动振动控制主动振动控制是一种通过主动力来控制结构振动的方法。
其基本原理是根据结构的振动响应,通过控制力的大小和作用时间来改变结构的振动状态。
常见的主动振动控制方法包括电液伺服振动控制和电液积分振动控制等。
电液伺服振动控制是通过电液伺服阀和液压缸等装置来实现的。
通过对液压缸内压力的控制,可以改变液压缸的长度,从而实现对结构振动的控制。
而电液积分振动控制则是通过控制液压缸的进油口和出油口的流量来实现的。
这两种方法都需要通过传感器对结构的振动进行实时监测,并根据监测结果进行相应的控制。
二、被动振动控制被动振动控制是一种通过添加阻尼器、隔振器等装置来消耗结构振动能量的方法。
其基本原理是通过增加结构的阻尼,降低结构的振动幅值和频率。
常见的被动振动控制方法包括阻尼器振动控制和隔振器振动控制等。
阻尼器振动控制是通过在结构中添加阻尼器来实现的。
阻尼器可以分为粘滞阻尼器、摩擦阻尼器和液体阻尼器等。
当结构发生振动时,阻尼器会吸收振动能量,并将其转化为热能,从而使结构振动幅值减小。
而隔振器振动控制则是通过在结构与地基之间添加隔振器,将结构的振动能量转移到隔振器上,从而减小对地基的振动传递。
三、半主动振动控制半主动振动控制是一种综合了主动振动控制和被动振动控制的方法。
其基本原理是通过结合主动力和阻尼装置来控制结构的振动。
常见的半主动振动控制方法包括液流能控制和磁流变控制等。
液流能控制是通过调节液压缸内的液体流量来实现的。
当结构发生振动时,液流能控制系统会根据传感器监测到的振动信号,调节液压缸内的液体流量,从而改变结构的振动状态。
磁流变控制则是利用磁流变材料的特性。
当结构发生振动时,磁流变材料会产生相应的阻尼力,从而降低结构的振动幅值。
结构动力学的振动控制与减震

结构动力学的振动控制与减震结构动力学是研究结构在外力作用下的振动响应和动力性能的学科。
在实际工程中,结构的振动问题对于结构的稳定性和耐久性具有重要的影响。
因此,结构振动的控制与减震成为了结构工程领域中的一个热门课题。
一、结构振动控制的意义结构振动控制的主要目的是降低结构振动对结构自身和周围环境的不良影响。
对于高层建筑、大型桥梁等大型结构来说,振动对结构的疲劳损伤和人员的舒适性都是非常重要的考虑因素。
因此,采取有效的振动控制手段可以提高结构的安全性和使用寿命。
二、常用的结构振动控制方法1. 被动控制方法被动控制是指通过吸能器、摇摆桥等被动装置来吸收结构振动的能量,从而减小结构的振幅和振动反应。
被动控制方法适用于不同类型的结构,但是其控制效果依赖于外界激励的频率和振幅。
2. 主动控制方法主动控制是指通过传感器感知结构振动信号,并通过控制器产生控制信号,进而通过执行机构减小结构的振幅。
主动控制方法可以根据振动信号的特点进行实时的振动控制,对于地震、风载等具有随机激励的情况效果较好。
3. 半主动控制方法半主动控制是在主动控制和被动控制之间的一种折中方案。
它通过调节控制器中的参数,根据结构的振动状态,实现减震和振动控制。
与被动控制相比,半主动控制方法具有更好的适应性和响应速度。
三、结构减震技术的应用结构减震技术是减少结构振动反应的一种有效手段。
常见的结构减震技术包括基础隔震、降低结构刚度和增加结构阻尼等方法。
1. 基础隔震基础隔震是指在结构与地基之间设置隔震装置,减小地震波对结构的冲击和损害。
常见的隔震装置包括橡胶隔震器、液体阻尼器等,通过隔震装置改变结构的振动特性,降低结构的振动反应。
2. 降低结构刚度降低结构刚度是指通过改变结构的刚度分布,使其自振频率相较于激励频率偏离较远。
常见的方法有在结构中增加柔性节点、改变结构截面形状等。
3. 增加结构阻尼增加结构阻尼是通过在结构中引入阻尼装置,消耗振动能量,减小结构的振幅。
结构振动控制的概念及分类
耗能方案性能来抵御地震作用的,即由结构本身储存和消耗地震能量,以满足结构抗震设防标准,小震不坏,可能无法满足安全性的要求;另一方面,在满足设计要求的情况下,结构构件的尺寸可能需做得很大木工程领域新兴一种新型的抗震方式——结构振动控制,即对结构施加控制机构,由控制机构和结构半主动控制和混合控制。
是由控制装置随结构一起振动变形而被动产生的。
被动控制可分为基础隔震技术、耗能减震技术和吸是由控制装置按某种控制规律,利用外加能源主动施加的。
主动控制系统由传感器、运算器和施力作术。
主动控制有主动拉索系统(ATS)、主动支撑系统(ABS)、主动可变刚度系统(AVSS)、主动质期开始研究主动控制。
目前,主动控制在土木工程中的应用已达30多项,如日本的Takenaka实验控制力虽也由控制装置自身的运动而被动的产生,但在控制过程中控制装置可以利用外加能源主动调置、半主动TMD、半主动力触动器、半主动变刚度装置和半主动变阻尼装置等。
主动控制,或者是同时应用不止一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装:同时采用AMD和TMD的混合控制系统、主动控制和基础隔震相结合的混合控制系统以及主动控制和京的清水公司技术研究所。
,但由于建筑结构体形巨大导致所需的外加能源较大,加之控制装置的控制的算法比较复杂,而且存好,容易实现,目前发展最快,应用最广,尤其是其中的基础隔震技术已相当成熟,并得到了一定程主动控制低廉,而且不需要较大的动力源,因此其具有广阔的应用和发展前景;混合控制综合了某几和耗能减震技术。
置控制机构来隔离地震能量向上部结构传输,使结构振动减轻,防止地震破坏。
目前研究开发的基础和混合隔震等。
近年来,越来越多的国家开展了基础隔震技术的研究,因此,隔震技术也得到了飞速:日本94栋,美国21栋,中国46栋,意大利19栋,新西兰16栋,已采用了基础隔震技术。
最近有使结构的振动能量分散,即结构的振动能量在原结构和子结构之间重新分配,从而达到减小主结构振尼器(TLD);(3)质量泵;(4)液压—质量控制系统(HMS);(5)空气阻尼器。
结构振动控制的概念及分类
耗能方案性能来抵御地震作用的,即由结构本身储存和消耗地震能量,以满足结构抗震设防标准,小震不坏,可能无法满足安全性的要求;另一方面,在满足设计要求的情况下,结构构件的尺寸可能需做得很大木工程领域新兴一种新型的抗震方式——结构振动控制,即对结构施加控制机构,由控制机构和结构半主动控制和混合控制。
是由控制装置随结构一起振动变形而被动产生的。
被动控制可分为基础隔震技术、耗能减震技术和吸是由控制装置按某种控制规律,利用外加能源主动施加的。
主动控制系统由传感器、运算器和施力作术。
主动控制有主动拉索系统(ATS)、主动支撑系统(ABS)、主动可变刚度系统(AVSS)、主动质期开始研究主动控制。
目前,主动控制在土木工程中的应用已达30多项,如日本的Takenaka实验控制力虽也由控制装置自身的运动而被动的产生,但在控制过程中控制装置可以利用外加能源主动调置、半主动TMD、半主动力触动器、半主动变刚度装置和半主动变阻尼装置等。
主动控制,或者是同时应用不止一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装:同时采用AMD和TMD的混合控制系统、主动控制和基础隔震相结合的混合控制系统以及主动控制和京的清水公司技术研究所。
,但由于建筑结构体形巨大导致所需的外加能源较大,加之控制装置的控制的算法比较复杂,而且存好,容易实现,目前发展最快,应用最广,尤其是其中的基础隔震技术已相当成熟,并得到了一定程主动控制低廉,而且不需要较大的动力源,因此其具有广阔的应用和发展前景;混合控制综合了某几和耗能减震技术。
置控制机构来隔离地震能量向上部结构传输,使结构振动减轻,防止地震破坏。
目前研究开发的基础和混合隔震等。
近年来,越来越多的国家开展了基础隔震技术的研究,因此,隔震技术也得到了飞速:日本94栋,美国21栋,中国46栋,意大利19栋,新西兰16栋,已采用了基础隔震技术。
最近有使结构的振动能量分散,即结构的振动能量在原结构和子结构之间重新分配,从而达到减小主结构振尼器(TLD);(3)质量泵;(4)液压—质量控制系统(HMS);(5)空气阻尼器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T Re E[ 2 (t ) 2 (t )] 102 I 22
由Matlab函数lqe2设计Kalman滤波器, 得到Kalman滤波器的增益矩阵:
0 0 0 0 K e lqe( A, D, C0 , A, Qe , Re ) 0.00230.0035 0.00350.0057
0 1 0 0 0 0 0 1 750 375 2.5981 0.866 375 375 0.866 1.732
0 T D 1 0 0 1 1 M Ds
0 0 022 0 0 B 1 106 M Bs 2.5 2.5 0 2.5
1.LQR控制算法
采用结构层相对地面位移坐标空间来建立结构运动微分方程为:
CX KX D MX s x g (t ) BsU
Ds 400000 400000
T
X ( 0) 0
(0) 0 X
1 1 Bs 0 1
X x1
结构控制系统状态反应可以用Matlab的微分方程求解器函数lsim求解, 即
g , t ) [ y1 , Z1 ] lsim((A BG), D, C0 , D0 , x
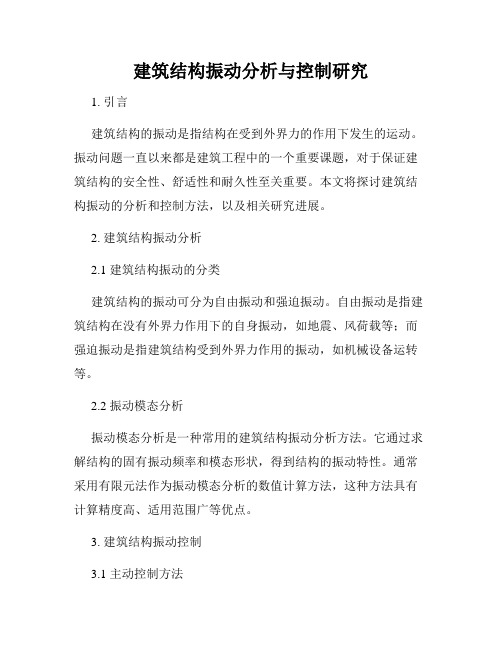
1.LQR控制算法
工况 第一层最大位移 第二层最大位移 第一层最大速度 第二层最大速度 第一层最大控制力 第二层最大控制力 第一层的减振率 第二层的减振率 无控 1.792 2.884 24.754 41.447 LQR 100 8 0.953 1.484 10.457 17.748 437.817 276.715 46.816 48.531 LQR 300 8 0.705 1.085 7.356 11.886 594.747 362.106 60.635 62.378 LQR 300 3 0.504 0.766 5.331 8.080 713.967 407.297 71.865 73.420 LQR 300 12 0.795 1.229 8.313 13.713 535.73 331.294 55.630 57.384 LQR 150 4 0.705 1.085 7.356 11.886 594.747 362.106 60.635 62.378 LQR 75 2 0.705 1.085 7.356 11.886 594.747 362.106 60.635 62.378
1.LQR控制算法
采用LQR算法设计控制力,权矩阵Q和R是两个重要的控制参数
K Q 022 022 M
R I 22 其中和为待定系数
利用Matlab的函数lqr求得控制力状态反馈增益矩阵, 即 当 300 8 106 控制力状态反馈增益矩阵G为:
k k K 1 2 k2 k2 3 1.5 = 108 k2 1.5 1.5
阻尼矩阵按Rayleigh阻尼计算
3000 4w2 1500 5 K w M 10 0 2 1500 1500 4w
2
w1 11.968 rad s w2 31.333 rad s
结构振动控制作业汇报
目录
1.LQR控制算法 2.LQG控制算法
3.极点配置控制算法 4.模态控制算法
5.滑移模态控制算法
1.LQR控制算法
根据给定的结构质量、层间刚度和 Rayleigh 阻尼 的假设,得到结构的质量矩阵、刚度矩阵和阻尼 矩阵分别为:
4 0 M 105 0 4
c 11.968 31.333 0.866 2 w1w2 2 0.05 1 0.0023 c w1 w2 1 31.333 11.968
1.0392 -0.3464 C c M c K 106 ( N s / m) 0.3464 0.6928
因此受控结构的状态方程和输出方程为:
ˆ ( A BG K C A K C BG) Z ˆ [K Z e 0 e 0 e
D][Y T
T DF ) Z 0 0 g x (t )]T Y C0 (Z
利用Matlab函数lsim可以求解状态方程得到结构的反应和控制力
2.LQG控制算法
LQG控制算法与LQR控制算法不同之处在于, 考虑在状态方程中加入输入噪声和量测 噪声 , 则状态方程变成:
AZ BU D g D1 (t ) Z x
Y C0 AZ C0 BU 2 (t )
Z (0) 0
状态反馈增益矩阵G由LQR控制算法计算:
1.7705 0 0.4187 0.2093 G 107 1.7705 1.7705 0.2093 0.4187
G lqr( A, B, Q, R)
AZ BU D U GZ 为最优控制力,将其带入到 g Z (0) 0 Z x
x2
T
U u1 u2
T
将结构运动微分方程写成状态方程:
AZ BU D g Z x
其中:
Z x1 x2 x3 x4
Z 0 0
1 x 2 x 3 x 4 T x
0 2 A 2 1 M K
I 22 M 1C