模糊控制与PID控制方法的比较
PID控制系统和模糊自适应PID控制系统的研究及比较_张金焕

第27卷 第5期 武汉理工大学学报 信息与管理工程版 V o.l 27N o .52005年10月 J OU RNAL OF WU T (I NFO R M AT ION &M ANAG E M ENT E NG I NEER I NG ) O c.t 2005文章编号:1007-144X (2005)05-0286-05收稿日期:2005-05-15.作者简介:张金焕(1981-),女,山东济宁人,武汉理工大学信息工程学院硕士研究生.基金项目:国家自然科学基金资助项目(50335020).PI D 控制系统和模糊自适应PI D 控制系统的研究及比较张金焕(武汉理工大学信息工程学院,湖北武汉430070)摘 要:首先介绍了P ID 控制系统的工作原理,因P I D 控制器结构简单、实现简单,控制效果良好,所以已得到广泛应用。
但当控制对象变化时,控制器的参数难以自动调整。
为了使控制器具有较好的自适应性,可以采用模糊控制理论的方法来实现控制器参数的自动调整。
模糊P I D 控制系统就是模糊理论与传统的P ID 控制器的结合。
最后以一控制对象为例,对该两种方式的控制进行了仿真和比较,并得出了相应的结论。
关键词:P ID 控制;模糊P ID 控制;模糊控制;模糊推理中图法分类号:TP373+.4 文献标识码:A1 引 言在工业控制中,PI D (Propo rtion ,I n t e gra l ,D if -fer ential )控制是工业控制中最常用的方法。
但是,它具有一定的局限性:当控制对象不同时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用模糊控制理论的方法[1]。
模糊控制已成为智能自动化控制研究中最为活跃而富有成果的领域。
其中,模糊PI D 控制技术扮演了十分重要的角色,并且仍将成为未来研究与应用的重点技术之一。
到目前为止,现代控制理论在许多控制应用中获得了大量成功的范例。
模糊控制与PID控制的对比及其复合控制
Co a io n mp st f u z nrl n nr l mp r na dCo o i o z yCo t dPI Co t s e F oa D o
YANG h ・ o Байду номын сангаасU u - n S iy ng, G ol i
( . c o l f mp trYa ti i es yYa ti 6 0 5C ia 1 S h o Co ue, na v ri , na 4 0 hn ; o Un t 2 2 De at n lcr a gn eig Y na o ain olg , a ti 6 0 0Chn . pr me t f et c l ie r , a ti ct a C l e Y na 2 4 0 ia) oE i En n V ol e
o e s o t n h re e u aig t e e s , h I c n r le c st e v tt ro . t o i e h rt o h v rh o d s o tnr g lt i , le t eP D o to lra t or mo esai er r I c mb n steme is fte a n m c t o to to s a d i y t ei u lt sa eb t rt a ec m mo D o to n h a i u z o to . e woc n r l meh d , n ss n h t q aii r et h n t o t c e e h nPI c nr la dt eb scf z yc n r 1 Th
短、 优势互补 , 了一种模糊 PD复合 型控 制器 。 设计 I 该复合控制器根据偏差范围的大小 , 通过模糊控制与 PD 制的 自 I控 动切换
模糊控制与PID控制的比较
模糊控制与PID控制的比较自20世纪60年代中期起,模糊控制逐渐崭露头角,其优越性也引起了人们的关注。
除了模糊控制,当今热门的控制算法之一是PID控制。
那么,模糊控制与PID控制之间的区别是什么呢?它们各自的优缺点是什么?在特定的应用场合下,哪种控制算法更适用?一、模糊控制概述模糊控制是一种无需准确模型或参数即可执行复杂控制系统的方法,它仅使用模糊逻辑来描述输入和输出之间的关系。
模糊控制系统的输入和输出都是模糊变量。
与其他控制方法相比,模糊控制系统可以更好地处理不确定性和模糊性,具有更强的容错能力和适应性。
模糊控制系统由四个主要组成部分组成:模糊化、模糊推理、解模糊化和规则库。
模糊化部分将传感器输出信号转换为模糊变量,模糊推理部分使用模糊逻辑基于模糊规则将模糊变量转换为控制信号,解模糊化部分将控制信号转换为精确的控制信号,规则库存储了模糊规则及其权重。
二、PID控制概述比例积分微分(PID)控制是一种经典的控制算法,其控制草图由三个部分组成。
比例项(P)根据当前误差大小进行输出,积分项(I)可以消除稳态误差,微分项(D)可以提高系统的稳定性并抑制系统的震荡。
PID控制器的设计基于系统的数学模型,在许多应用中,这个模型是已知的。
在这些情况下,PID控制器可以通过调整不同部分的增益以进行优化。
三、模糊控制与PID控制的对比1. 精度PID控制器可以实现非常高的精度,特别是在恒定环境下,模糊控制器具有更高的容错能力和适应性,而且围绕控制正常的范围内快速做出反应。
2. 调节PID调节通常是更容易实现的PLC控制器中自动化开发环境的系统。
Fuzzy可能更多地需要手动调整和对规则进行逐步精细的训练,但它也可以被训练自动化。
3. 适应性模糊控制器的好处是可以轻松地处理不确定性和模糊性,因此可以应对复杂环境。
PID控制器则对不确定性和模糊性更加敏感,而且会因不确定性的变化而导致过度响应或不足响应的问题。
4. 实际应用PID控制器广泛应用于许多领域,如化工、制造和机械工程。
模糊控制与PID传统控制比较
模糊控制与
传统PID控制比较
目录
引言 (3)
第一章开环测试 (3)
1.1开环测试 (3)
1.2 PID控制 (4)
1.2.1 PID概述: (4)
1.2.2 PID结构 (4)
1.2.3 PID参数作用 (5)
1.2.4 PID调节方法(自整定过程) (6)
第二章:模糊控制 (10)
2.1模糊控制技术的起源与特点 (10)
2.2模糊控制论的特点: (11)
2.3模糊控制研究现状: (11)
2.4模糊控制的发展趋势: (12)
2.5设计一个模糊控制器规则: (12)
2.6一个基本模糊控制器主要有三个功能 (13)
2.7模糊控制器主要步骤: (13)
2.9 simulink仿真 (15)
第三章:模糊控制与传统PID控制比较: (16)
3.1 死区、迟滞 (16)
3.2 PID控制器和模糊控制器对比: (17)
参考文献: (20)
引言
模糊控制不需要确定系统的精确数学模型,是一种基于规则的控制。
模糊控制在智能控制领域由于理论研究比较成熟、实现相对比较简单、适应面宽而得到广泛的应用。
不论是对复杂的水泥回转窑的控制,还是在智能化家用电器中的应用,模糊控制都充当着重要的角色。
以下我们从一个典型工业过程通常可以等效为二阶系统加上一个非线性环节(如纯滞后),给出如下典型控制对象传递函数的一般形式:[1]
Gp(s)=K*e-τs/(T1s+1)(T2s+1)
第一章开环测试
1.1开环测试:取K=1,T1=2,T2=4,τ=0.1;
在simulink中搭建开环测试框架图:
图1 开环测试图
仿真结果:。
传统PID控制与模糊控制方法的仿真比较研究
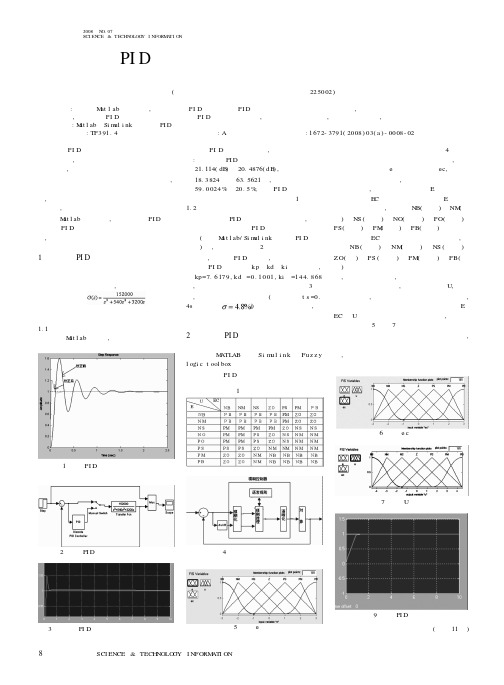
科技资讯科技资讯S I N &T NOLO GY I NFORM TI ON2008N O.07SCI EN CE &TECHN OLOG Y I NFOR M A TI O N高新技术传统PI D 控制是通过调整参数获得良好控制效果的,但参数整定值只具有一定局域性的优化值,全局控制效果不是很理想。
模糊控制器是近年来发展很快的一种新型控制器,它能方便地将专家的经验与推理输入计算机中,使计算机在控制时可以像人一样思考并解决问题,从而达到控制被控对象的目的。
本文利用M at l ab 仿真软件,分别将传统PI D 控制与模糊PI D 控制应用于交流伺服系统的控制中,并作了仿真比较研究。
1加入传统PI D 控制器的交流伺服电机系统的仿真对于交流伺服电机这一具有非线性、不确定性等特征的被控对象,我们可用近似的数学模型传递函数来表征系统在无转动惯量变化、无冲击和力矩干扰等情况下的系统的动态特性。
1.1程序法先用M at l ab 程序法,对该伺服电机系统进行传统PI D 控制模拟仿真,程序运行后结果为:加入传统PI D 控制器前后的幅值裕量分别为21.114(dB )和20.4876(dB ),相位裕量分别为18.3824度和63.5621度,最大超调量分别为59.0024%和20.5%;传统PI D 控制器加入前后的阶跃响应仿真曲线对比如图1所示。
1.2模块法为使传统PI D 控制产生更好的效果,可用模块法仿真加入传统PI D 控制器的伺服电机系统(即用M a t l ab/Si m ul i nk 的现成PI D 控制模块)中,仿真框图如图2所示。
在开关打到下面时,即接入PI D 控制器,在线根据经验反复调整PI D 控制器的kp 、kd 、ki 三个参数,当kp=7.6179,kd =0.1001,ki =144.868时,运行仿真得出的阶跃响应波形如图3所示,其控制效果的动态性能(调节时间t s =0.4s、超调量)比程序法好了不少,但控制精度还差些。
模糊控制与PID控制在机器人控制系统中的应用比较研究
模糊控制与PID控制在机器人控制系统中的应用比较研究机器人控制系统是现代机器人技术的关键之一。
机器人控制系统通常由多种控制算法组合而成,以实现控制机构、传感器和执行器之间的有效沟通和合作。
其中,模糊控制和PID控制是被广泛应用的两种控制算法。
本文将对这两种控制算法进行比较研究,探讨它们在机器人控制系统中的应用情况。
1. 模糊控制模糊控制是一种基于模糊逻辑的控制技术,它使用模糊变量和规则来描述并控制非线性、模糊和复杂的系统。
模糊控制器通常包括模糊推理机、模糊集和模糊逻辑。
通过对输入变量的模糊化和规则的匹配,模糊控制器可以对机器人的动作进行柔性控制,从而满足不同场景下的控制需求。
在机器人控制系统中,模糊控制应用广泛。
例如,机器人的避障控制、路径规划控制和手臂控制等都可以采用模糊控制算法进行优化。
模糊控制有以下优点:1.1 适应复杂系统由于模糊控制算法能够实现非线性、模糊和复杂系统的控制,因此可以针对具有多种信号输入和输出的机器人进行调整和优化,使机器人的响应更为准确。
1.2 开发简单快速使用模糊控制进行机器人控制时,只需要基于模糊集、模糊逻辑和模糊推理等基本概念,即可实现所需的控制动作,而无需进行大量的复杂运算和数据处理,开发难度较小且开发速度快。
1.3 灵活性高机器人控制中的模糊控制通过对机器人动作的柔性控制,使得可实现与机器人环境之间的互动,等效于人的行为,因此其兼容性和灵活性更高。
2. PID控制PID控制器是一种基于比例、积分、微分(英文缩写P、I、D)三个参数的控制算法。
PID控制器能够检测到偏差、积分误差和微分误差,并结合比例系数、积分系数和微分系数,计算出一个控制动作,使机器人实现期望动作。
在机器人控制系统中,PID控制同样应用广泛。
例如,对于机器人的姿态控制、精密装配控制和行走活动控制等,PID控制都可以派上用场。
PID控制有以下优点:2.1 稳定性好PID控制器天然的误差反馈机制,使得可以有效地避免系统出现较大的误差,保证系统状态中的稳态性。
经典PID与模糊PID控制

)4)(3)(1(2)(+++=s s s ss G 经典PID 与模糊PID 控制一、PID 控制规律控制输出由三部分组成:比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。
比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏。
比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM 、PM 、稳态误差等。
积分环节——用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数TI 的大小, TI 越小,积分作用越强。
需要注意的是积分作用过强,可能引起系统的不稳定。
微分环节——根据偏差量的变化趋势调节系统控制量,在偏差信号发生较大的变化以前,提前引入一个早期的校正注意的是微分作用过强,可能引起系统的振荡。
已知被控对象的数学模型:二、经典PID 设计由于在设计PID 控制器中要调整3个参数,根轨迹与波特图设计方法通常不被直接采用。
Ziegler 与Nichols 发展了PID 调节器设计方法。
该方法基于简单的稳定性分析方法。
首先,置0==I D K K ,然后增加比例系数直至系统开始振荡(即闭环系统极点在jw 轴上)。
再将该比例系数乘0.6,其他参数按下式计算:m P K K 6.0= m P D w Pi K K 4= Pi w K K m P I =式中,m K 为系统开始振荡时的K 值;m w 为振荡频率。
然而,该设计方法在设计过程中没有考虑任何特性要求。
但是Ziegler 与Nichols 发现这种设计方法给予过程控制器提供了好的工作性能。
工程师们的多年实践经验证明,这种设计方法的确是一种好的方法。
根据给定传递函数用SIMULINK 搭建结构图如下:起振时m K =391,如图:根据公式计算Kp 、I K 、D K 分别为234.6、276、49.8525 此时对于常数3的响应曲线如图:可见,此时系统振荡,不稳定,继续等比例调节参数得新参数65、77、14,得响应曲线:可见此时系统响应时间过长,而且存在比较大的静态误差,为了减小响应时K,同时调节过程中会因参数变动产生间应增大Kp,为了减小静态误差应增大I超调量,综合以上几点性能决定确定参数为120、300、14。
DC/DC变换器模糊控制和PID控制比较研究
特 定 工作 点 Q , R) 控制 到输 出 电压 的 ( D, 处
ma c s u i g t e e t o c n r l r ae c mp e a e n h x e me t e u s p ro e y r tt p f a n e sn h s w o tol s r o a d b s d o t e e p r n a r s h ef r d b a p o oy e o e r i l m
摘要 : 糊控 制器 因 具有控 制鲁 棒性 强 , 模 设计 不 依赖 于被控 对 象精 确模 型等 优 点而 逐渐 应用 在 电力 电子变 换 器 中。以 B ot 换器 为例 , os变 从设计 方法 、 具体 工程 实现和 实验 结果三方 面对传 统线性 比例积 分微 分 (i ) ro 控制 器和模 糊控 制器进 行 了对 比分析 。详细 阐述 了 PD控制 器和 模糊控 制器 的设 计方 法 , I 对其 设计 的侧 重 点进行 了对 比。 过实验 对 比 了线性 PD控 制器 与模糊控 制器 的控制 性能 。 通 I 实验结 果表 明 , 糊控 制技 术相对 于线性 模
一
个 比例 环 节 , : 即
H( ) 1G , G () 1 s= / : / () 4
I
(I ) 厂
.
1V ] hS
调节器
一 V c} D =
&J -
: ;
I
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海交通大学学报JOURNAL OF SHANGHAI JIAOTONGUNIVERSITY1999年 第三十三卷 Vol.33 第4期No.4 1999模糊控制与PID控制方法的比较张恩勤, 施颂椒, 翁正新摘 要:研究了常规模糊控制器与PID控制器的关系.基于T-S模型,在一定的附加条件下,对这些模糊控制器进行了分析,理论上给出了这类模糊控制器与PID控制器参数间的定量关系式,并指出两者间的本质联系.仿真结果表明了模糊控制器与PID控制器的相似性,多个规则的模糊控制器要优于PID控制器,同时给出了一类模糊PID复合控制器(TS-PID)的设计方法.该类复合控制器兼有模糊控制器与PID控制器优点,具有较深远的应用前景.关键词:模糊控制;PID控制;T-S模型中图分类号:TP 273.3 文献标识码:AComparative Study of Fuzzy Control and PID ControlZHANG En-qin, SHI Song-jiao, WENG Zheng-xinDept. of Automation, Shanghai Jiaotong Univ., Shanghai 200030, China Abstract: Fuzzy control and PID control are two main control methods in industry process. How to design a new controller combining the merits of these two is of great application value. A type of fuzzy controller based on T-S model was studied. The qualitative relationship between the parameters of this type of fuzzy controller and PID controller was theoretically proposed. The simulation results demonstrate that conventional fuzzy controller and PID controller have similar characters, but the fuzzy controller based on more rules has better qualities. Meanwhile, a design method of the complex fuzzy controller based on T-S model was given, which is of great value in industry application potentially.Key words: fuzzy control; PID control; T-S model 众多学者对模糊控制和PID控制进行了比较.Tang[1]对常规模糊控制器机理进行了分析,指出一般模糊控制器同PI控制器的相似性.Ying[2]和Li[3]从不同方面对模糊控制器进行分析,指出同PID控制器的因子K p、K i、K d之间的关系.他们的分析均是基于一种类比形式.本文基于T-S模型[4],指出了模糊控制器同PID控制器的关系:一类特殊的基于T-S模型的模糊控制器是一种复合PID控制器.1 PID控制方法及模糊控制方法 常见PI、PD、PID控制的形式为 (1) (2) (3)式中K p、K i、K d为PID控制器的3个调节因子. 常规模糊控制器FZ-PI、FZ-PD、FZ-PID的形式分别为 (4) (5) (6)式中:K e、K c、K s、K u为模糊控制器的量化因子和比例因子;F1、F2、F3为模糊推理,一般为非线性映射.实际中,FZ-PI、FZ-PID模糊控制器均采用增量式控制方法,为讨论方便及与式(1)~(3)形成对比,式(4)、(6)中的第一式均采用连续型表示方式.文献[1~3]采取不同方式对F1、F2、F3进行简化,并对比以上相应各式,从而得出K p、K i、K d与K e、K c、K s、K u之间的各种关系式.2 基于T-S模型的模糊控制器分析 采用T-S模型[4]的模糊控制规则一般为R i: If er is Ai, ie is Bi, de is Ci,Then u i=b i0+b i1.er+b i2.ie+b i3.de取特殊情况b i0=0.假设当前输出偏差为e,由规则R i可得输出为 (7) 假设共有N条规则,选取极小蕴涵关系及加权输出方法,可得FZ-PID控制器输出(注:如果无特殊说明,以下所述FZ-PID控制器均指基于T-S模型的模糊控制器): (8)式中,加权系数为记,称之为相对加权系数.展开式(8)得整理可得与式(3)比较,可得FZ-PID控制器中对应于PID控制器的3个参数为 (9)可简记3 模糊控制与PID控制方法比较 以上分析中得出了一类基于T-S模型的FZ-PID控制器的3个参数:K FZ-p、K FZ-i、K FZ-d.同PID控制器的3个参数K p、K i、K d相比,K FZ-p、K FZ-i、K FZ-d具有更广泛的意义.K p、K i、K d在一般控制中是常数(在较复杂或时变系统,这3个参数可定为分段常数);但K FZ-p、K FZ-i、K FZ-d却是变量.从式(9)可知K FZ-p、K FZ-i、K FZ-d与e、∫e、有关,即上述3个参数应记为 从上式分析可知,FZ-PID控制器可看作是一种变参数的PID控制器.由于隶属度函数一般是非线性的,上式中映射f1、f2、f3均为非线性映射.因此,FZ-PID控制器是一种非线性控制器.另外,从式(7)分析可知,只有一条规则的FZ-PID模糊控制器,实际上就是一般意义的PID控制器.如果N=1,则p1=1,由式(9)可得控制输出为结果与式(7)相同,即单个规则的FZ-PID模糊控制器就是PID控制器.再由式(8)分析可知,多条规则的FZ-PID模糊控制器是多个PID控制器的复合作用,只是在不同的状态下,由单个规则所确定的PID控制器具有不同的加权因子.因此,FZ-PID控制器也可看作一种复合PID控制器:4 仿真分析 为了与PID控制器作比较,在此,选择一种简单的模糊控制器,则有以下3条规则:其中,U1、U2、U3的隶属函数为常数“1”,误差e、误差变化率de的定义如图1所示.图1 论域e、de上的模糊量定义Fig.1 Definition of fuzzy variables on discourse e and de 选取二阶系统[(25s+1)(5s+1)]-1及三阶系统[(25s+1)(15s+1)(5s+1)]-1,模糊控制器及PID控制器的参数选取见表1,输出响应见图2.图2(a)在R1参数与PID相同的情况下,比较了模糊控制器与PID控制器的特性;图2(b)比较了两组参数的PID控制器与模糊控制器的特性.表1 二阶、三阶系统控制器参数Tab.1 Parameters for 2-order plant and 3-order plant参数二 阶三 阶PID R1R2R3PID1PID2R1R2R3K p 3.0 3.0 3.0 3.0 4.0 4.0 4.0 4.0 4.0 K i0.3410.3411.651.650.170.10.10.750.75 K d0.580.580.580.580.820.820.820.820.82图2 系统的仿真曲线Fig.2 Simulation curves 仿真结果表明,模糊控制器与PID控制器的控制效果相近.从图2(b)可看出,PID控制对积分因子较为敏感.但在模糊控制中,即使让R1选取较差的一组参数(同PID2),若增加两个规则,控制效果也比较好,说明了模糊控制器具有一定的鲁棒性.5 结 论 本文对模糊控制器与PID控制器作了比较研究,在一定条件下,对基于T-S模型的一类模糊控制器进行了分析,指出了这类模糊控制器可看作是一种复合PID控制器,或者变参数的PID控制器.这类模糊控制器利用T-S模型,前件采用模糊推理,后件采用PID精确输出,兼有常规模糊控制与PID控制优点,具有一定的应用前景.作者简介:张恩勤(1971~),男,博士生.作者单位:张恩勤, 施颂椒, 翁正新 (上海交通大学 自动化系,上海 200030)参考文献:[1] Tang K L. Comparing fuzzy logic with classical con-troller design [J]. IEEE Trans SMC, 1987, 17(6):1085~1087.[2] Ying H. A nonlinear fuzzy controller with linear con-trol rules in the sum of global two-dimensional multilevel relay and a local nolinear PI controller [J]. Automatica, 1993, 29(2):499~505.[3] Li H X. A comparative design and tuning for conven-tional fuzzy control [J]. IEEE Trans SMC PB: Cybernetics, 1997,27(5):884~889.[4] Takagi T, Sugeno M. Fuzzy identification of systemsand its applications to modeling and control [J]. IEEE Trans SMC, 1985, 15(1):116~132.收稿日期:1998-05-04模糊控制与PID控制方法的比较作者:张恩勤, 施颂椒, 翁正新, ZHANG En-qin, SHI Song-jiao, WENG Zheng-xin作者单位:上海交通大学,自动化系,上海,200030刊名:上海交通大学学报英文刊名:JOURNAL OF SHANGHAI JIAOTONG UNIVERSITY年,卷(期):1999,33(4)被引用次数:50次1.Tang K L Comparing fuzzy logic with classical con-troller design 1987(06)2.Ying H A nonlinear fuzzy controller with linear con-trol rules in the sum of global two-dimensional multilevel relay anda local nolinear PI controller 1993(02)3.Li H X A comparative design and tuning for conven-tional fuzzy control 1997(05)4.Takagi T.Sugeno M Fuzzy identification of systemsand its applications to modeling and control 1985(01)1.期刊论文亢海伟.杨庆芬.王硕禾.Kang Haiwei.Yang Qingfen.Wang Shuohe模糊控制与PID控制的内在联系-石家庄铁道学院学报2000,13(1)讨论了模糊控制与PD控制、PI控制的关系.提出一种积分分离式的模糊控制方法.进而讨论了模糊控制比例因子的调整方案及其对稳定性的影响.2.学位论文叶润玉锅炉汽包水位三冲量自适应模糊PID控制、模糊控制2006锅炉是典型的复杂热工系统,目前,中国各种类型的锅炉有几十万台,由于设备分散、管理不善或技术原因,使多数锅炉难以处于良好的工况,增加了锅炉的燃料消耗,降低了效率。