双编码器定位调试(DEH21B初始化)
SEW-MDX61B-异步电机调...

SEW-MDX61B-异步电机调...配置:①驱动器MDX61B…0T ②编码器板DEH21B(DEU21B)③Profinet IO⽹卡:DFE32B ④异步电机-带增量型编码器…DRE(N)(S)…ES(G)7S(R) + 外部SSI绝对值编码器驱动应⽤场合:对于弹性连接系统,即电机编码器与物体实际运⾏的距离不能保持相同⽐例的连接结构。
如1. 轮轨传动;2. 钢丝绳传动1编码器编码器激光测距系统架构:23L1L2L3PE编码器卡电机编码器DRE(N)(S)...异步电机1. ⽔平驱动2. 升降驱动硬件接线:⽔平驱动45机铭牌左下脚;驱动器输出U,V,W 必须与伺服电机的U,V,W 严格⼀⼀对应驱动器输出动⼒电缆请⽤专⽤的屏蔽线缆导致⼲扰问题958361驱动器处编码器连接为D 型插头需配9芯针型插头Data+Data-Cycle+Cycle-GND DC 24V驱动器处编码器连接为D 型插头15芯针型插头电机处编码器连接为端⼦的8芯屏蔽信号线+⿊蓝粉灰编码器电缆型号拖缆⽤:1332458613324594 SEW-增量型编码器 E...S :Sin/Cos 信号(SEW 编码器电缆颜⾊)+紫E...R :TTL 信号编码器电缆请⽤专⽤的6芯屏蔽信号线缆,每两芯为⼀双绞SEW-编码器电缆型号拖缆⽤:19959011995898硬件接线:升降驱动!! (建议:制动器采⽤快速制动;PLC 保护制动)(防⽌溜车,及意外坠落)6驱动器输出U,V,W 必须与伺服电机的U,V,W 严格⼀⼀对应驱动器输出动⼒电缆请⽤专⽤的屏蔽线缆扰问题958361驱动器处编码器连接为D 型插头需配9芯针型插头Data+Data-Cycle+Cycle-GND DC 24V驱动器处编码器连接为D 型插头15芯针型插头电机处编码器连接为端⼦的8芯屏蔽信号线+⿊编码器电缆型号拖缆⽤:1332458613324594 SEW-增量型编码器 E...S :Sin/Cos 信号(SEW 编码器电缆颜⾊)+紫E...R :TTL 信号编码器电缆请⽤专⽤的6芯屏蔽信号线缆,每两芯为⼀双绞SEW-编码器电缆型号拖缆⽤:19959011995898机铭牌左下脚;请将出⼚时接在制动整流块5脚上的蓝⾊线调到4脚将⽹卡的Def IP开关设置到“0”的位置,⽤PLC设置相应的IP地址如果Def IP开关在“1”的位置,⽤PLC设置好的IP地址,在断电后,⼜重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端⼦功能:7在对伺服系统作初始化配置,以及对⼀些重要的结构功能性参数进⾏设置时,必须将/CONTROL.INHIBIT端⼦置为0,⽽系统运⾏前,需将/CONTROL.INHIBIT端⼦置为1,在此端⼦由1变为0时,伺服控制器将⽴即停⽌所有输出,电机马上处于⽆控制状态,系统按其惯性⾃由停车,因此不能⽤此端⼦进⾏正常的快速停⽌功能。
DEH、MEH阀门调试步骤

DEH、MEH阀门调试步骤一、调试应具备的条件EH油系统工作正常,ETS工作正常,可正常挂闸。
二、调试前要做的工作(一)模件设置在手拿模件前,请佩戴上防静电手环。
1、IMHSS03 模件上的SW设置∙S1开关具有8位,用来设置模件地址(0-63可设)例如:模件地址设为6,则开关S1应为S1:00000110∙S2开关具有8位,用来设置解调器增益。
控制器组态都采用FC55功能码,此设置被忽略,将解调器增益设为2∙S3开关具有8位,用来设置控制器增益。
控制器组态都采用FC55功能码,此设置被忽略,将控制器增益设为1∙S4开关具有2位,用来设置LVDT振荡器频率控制器组态都采用FC55功能码,此设置被忽略,将LVDT振荡器频率设为1S2,S3,S4采用了F55功能码已不起作用。
∙S5开关具有8位,用来设置高频振荡器频率和振幅,以及LVDT 振荡器的振幅(LVDT原边激励电压)。
对于高频振荡器的频率和振幅的设置,应根据伺服阀制造商推荐的数据进行。
开关的1、2位设置振荡器频率,3、4位设置振幅或振荡电路。
开关的5、6、7、8设置LVDT振荡器的振幅。
其设置的值应根据制造商推荐的数据进行。
其设置应注意:∙设置高频振荡器电流振幅和频率应参考伺服阀推荐的参数;∙参考相关的表格设置1~4位的位置;∙设置LVDT振荡器振幅应参考LVDT推荐的参数;∙参考相关的表格设置5~8位的位置;常规设置S5:101110112、IMHSS03模件的跳线器设置在模件上具有31个跳线器。
通过这些跳线器选择:伺服阀工作方式,伺服阀输出的电流,一般为±40mA,但因根据伺服阀型号来确定,AC型六线制(二)安装检查得到阀门具备校验通知后,应对LVDT和伺服阀的安装进行检查,尽量使LVDT的铁芯杆对中安装,便于阀门校验的调整。
伺服阀接头安装牢固。
(三)接线检查外部接线没有接好之前,不要将IMHSS03模件插入MMU。
在动外部回路(LVDT、伺服阀)等线路前,请大家切记一定要将模件拔出。
电动阀门编码器调零方法
电动阀门编码器调零方法
电动阀门编码器调零方法如下:
1. 确定阀门编码器的零位位置,即阀门关闭状态下的编码器值。
2. 确定电动阀门的正向旋转方向,即阀门打开时编码器数值增加的方向。
3. 打开控制系统,进入编码器调零模式。
4. 将电动阀门旋转至关闭状态,并记录下当前编码器数值。
5. 按照步骤2中确定的旋转方向,将电动阀门旋转至打开状态,直到编码器数值达到预设的最大值。
6. 再将电动阀门旋转至关闭状态,并等待编码器数值稳定。
7. 将编码器数值与步骤4中记录的数值比较,如果两者相等,则表示调零成功;如果不相等,则需要进行进一步调整。
8. 根据调整的结果,重新设置编码器的零位位置。
9. 完成调零后,测试电动阀门的开关动作,确保其按照预设的值进行操作。
请注意,具体的调零方法可能因不同的电动阀门和编码器型号而有所不同,以上仅为一般性的调零步骤。
在实际操作中,请确保按照设备说明书或相关技术资料进行正确操作,并注意安全防护措施。
如有需要,请咨询专业人士进行操作指导。
编码器确定零位的七种方法
编码器确定零位的七种方法1、编码器轴转动找零,编码器在安装时,旋转转轴对应零位,一般增量值与单圈绝对值会用这种方法,而轴套型的编码器也用这种方法。
缺点,零点不太好找,精度较低。
2、与上面方法相当,只是编码器外壳旋转找零,这主要是对于一些紧凑型安装的同步法兰(也有叫伺服法兰)外壳所用,3、通电移动安装机械对零,通电将安装的机械移动到对应的编码器零位对应位置安装。
4、偏置计算,机械和编码器都不需要找零,根据编码器读数与实际位置的偏差计算,获得偏置量,以后编码器读数后减去这个偏置量。
例如编码器的读数为100,而实际位置是90,计算下在实际位置0位时,编码器的读数应该是10,而这个“10”就是偏置量,以后编码器读到的数,减去这个偏置量就是位置值。
可重复多次,修正偏置量。
对于增量值编码器,是读取原始机械零位到第一个Z点的读数,作为偏置量。
精度较高的编码器,或者量程较大的绝对值多圈编码器,多用这种方法。
5、智能化外部置零,有些带智能化功能的编码器,可提供外部置位功能,例如通过编码器附带的按键,或外带的软件设置功能置零。
6、需要说明的是,绝对值编码器的零位再往下就是编码的循环最大值,无论是单圈绝对值,还是多圈绝对值,如果置零位,那么再往下(下滑、移动,惯性过冲等),就可能数据一下子跳到最大了,对于高位数的绝对值多圈,可能数据会溢出原来的设定范围。
另外,绝对值编码器还有一个旋转方向的问题,置零后,如果方向不对,是从0跳到最大,然后由大变小的。
一些进口的编码器尽管带有外部置零功能,但建议还是不要用此功能。
(我们碰到很多用进口绝对值编码器会碰到这样的困惑,不要就迷信进口的)。
7、最好的置位方法,预置一个非零位(留下下滑、过冲的余量)并预置旋转方向+偏置计算的方法。
另外一种方法是置“中”,偏置量就是中点值,置位线与电源正相触后,编码器输出的就是中点位置,这样的行程是+/-半全程,在这样的行程范围内,无论旋转方向,确保不会经过零点跳变。
编码器修正说明书(第5-4-3)

5.4.3编码器复位因某种故障导致编码器数据成为异常值或更换马达时,需要使机器人返回原位置(修正编码器)。
在这种情况下,需要首先重新进行编码器复位,请按下列步骤执行编码器复位操作。
如果进行编码器复位,则编码器数据将被初始化,使机器人无法正常动作。
在复位后,必须使用零点栓进行编码器修正。
如果未正确进行编码器的修正,则在再生作业程序时,会因机器人误动作使作业人员被机器人夹伤,而导致人员死亡或受重伤。
连接马达后,因编码器内部超级电容器放电,可能出现下列错误。
(例:连接了超级电容器与未充电的新马达时)E 0050……编码器计数器溢流/下溢。
E 0052……编码器电池异常。
编码器数据也可能出现异常。
此时,请在接通控制装置电源10分钟后再进行编码器复位。
然后,先使控制装置电源OFF后,再次使电源O N ,则设备会恢复正常状态。
必需的工器具编码器复位无需使用特别的工器具。
编码器复位步骤****-**处显示的是机器人型号。
****-**处显示的是机器人型号。
将光标对准对象轴(执行编码器复位的轴),同时按下[功能转换]键键。
≫ 在勾选框内选择对象轴。
补充****-**处显示的是机器人型号。
至此已经完成编码器复位。
接下来,请参照下一节执行编码器修正。
5.4.4编码器修正 实施编码器复位操作后,再实施编码器修正作业。
这是使机器人(修正的对象轴)对齐规定的位置(称为基准位置,即插入零点栓的位置),在该位置登录“编码器修正值”,使编码器数据显示规定值的操作。
各轴的基准位置(插入零点栓的位置)和当时的编码器数据如下图所示。
此编码器数据是在确认正确实施了修正时需要用到的非常重要的数字。
[ST133F-01][ST166F-01][ST210F-01]图5.4.4-1 地面安装型 J1,J2,J3轴的基准位置(零点栓插入部位)基准位置处的 编码器数据 J1轴 80,000[Hex] J2轴 80,000[Hex] J3轴 80,000[Hex]图5.4.4-2 棚架安装型J1,J2,J3轴的基准位置(零点栓插入部位) [ST133F-01][ST166F-01][ST133TF-01][ST166TF-01]图5.4.4-3 手腕轴的基准位置(零点栓插入部位)[ST210F-01][ST210TF-01]图5.4.4-4 手腕轴的基准位置(零点栓插入部位)在机器人动作过程中发生马达损坏等情况时,有时须在不能插入零点栓的位置上更换马达及执行编码器复位。
双编码器定位调试(DEH21B初始化)

1、在调试前,必须熟读SEW控制器的系统手册,熟悉了解机械结构和可能发生的危险;2、安装SEW的调试软件,MOVITOOLS3、安装完成后,打开软件,软件可以在如下地址找到:开始/SEW/MOVITOOLS/MT-Manager,或者你可以在桌面上创建一个图标,直接双击图标:打开。
4、打开软件后,连接上调试线缆USB11A,程序的主页面的设定如下,其中PC-interface中,选一个带(USB)标志的端口即可;如图:5、按上图设置完成后,点击中央的那个Update,等待扫描完成;扫描完成后,会显示所连接的设备类型和信息,如图:6、打开SHELL后,进行调试第一步,即输入电机参数,SEW叫电机的初始化(也叫Startup),如下图所示,点击那个小电机的图标:请耐心等待设备上传信息,上传完成后,会出现配置的信息总览画面,信息总览会显示最近一次你的配置信息,如果是新设备,则会显示出厂的配置信息,如图:点击Start-up Set 1,按照向导提示输入电机数据,过程如下图所示:选择下一步;这个画面不用管,直接下一步;其中ES7S 为SEW 电机尾部编码器型号,在输入的选择框中,为:小写的x 代表0-9任意的数字;这两个代表了热保护的类型和热保护动作时候的反应,热保护的反应可以根据用户现场实际情况进行调整;输入完成后,点击下一步;选使用编码器,然后下一步;选定位控制模式,下一步;选电流的矢量控制方式(CFC ),下一步;按照实际,铭牌设定完成后,点击下一步即可;这个画面就是系统根据您上一步填入的信息,计算出来的最合适的参数,点击接受建议值即可,然后点击下一步;同样接受建议值,点击下一步;在这里,建议先接受建议值,然后把设定值源和控制源修改为FIELDBUS(总线),再点击下一步;点击Download完成下载,然后点击完成,确认。
7、电机初始化完成,然后配置SICK DME5000编码器;同样,在SHELL里面,Startup,找到DIP/DEH21B Startup,如下图所示,按照向导提示输入参数即可;如下图:点击下一步;选择下一步;根据所连接的编码器,选择对应的型号,然后点击下一步;填入150,点击下一步;选择这个,点击下一步;选择这个,然后下一步;手动操作,通过这个可以再没有PLC的时候控制伺服电机用笔记下当前位置,一会有用,两个都要记用笔记下当前位置,一会有用,两个都要记用手动操作模式移动小车走一段距离,或者是打开制动器,用手推小车走一段距离都可以,再几下当前位置,一会有用。
编号倍加福编码器初始值设定方法
倍加福编码器初始值设定方法
在大型龙门吊的大车纠偏及起升高度的调试过程中,经常遇到绝对值编码器的初始值与自己的期望值差距很大,从而导致需要一个个编码器的手动转,使其达到自己的需要值,如果编码器损坏又得重复这个繁琐的过程,通过与同事讨论及实践,总结出了倍加福编码器初始值的设定方法,从而减轻了大家的劳动强度;
倍加福编码器的第一个字是圈数,第二字是步数,在设定过程中我们需要把自己需要设定的圈数放在高16位,需要设定的步数放在低16位,然后把最高位置1,输出到倍加福编码器中;然后再把高16位、低16位全部设置为零,再输出到倍加福编码器中;下面以西门子plc为例进行示范;
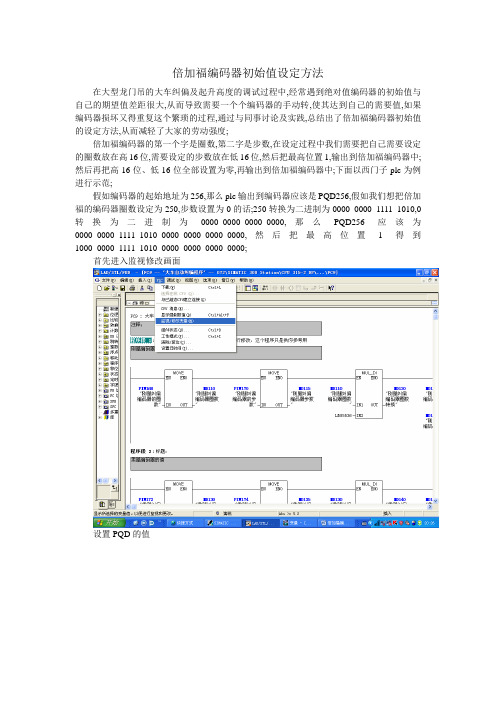
假如编码器的起始地址为256,那么plc输出到编码器应该是PQD256,假如我们想把倍加福的编码器圈数设定为250,步数设置为0的话;250转换为二进制为0000_0000_1111_1010,0转换为二进制为0000_0000_0000_0000,那么PQD256应该为0000_0000_1111_1010_0000_0000_0000_0000,然后把最高位置1得到1000_0000_1111_1010_0000_0000_0000_0000;
首先进入监视修改画面
设置PQD的值
然后修改编码器的值
然后把编码器值设置为零
然后编码器的圈数就变成了250.步数就变成了0.
方法二、通过程序来修改编码器的初始值,1000_0000_1111_1010_0000_0000_0000_0000转换成十进制为-48;那么通过程序修改如下图所示:。
SEW-MDX61B-同步伺服系统调试方法和步骤-刚性系统-总线位置控制-3PD-Profinet IO-带绝对值型编码器A..H

③Profinet IO网卡:DFE32B ④同步伺服电机-带绝对值型编码器…CM…AS(K)1H12驱动应用场合:对于刚性连接系统,即电机编码器与物体实际运行的距离能始终保持相同比例的连接结构。
如1. 直连传动;2. 丝杆传动;3. 齿轮齿条传动;4. 同步带传动(同步带拉升量在允许范围内);5. 链条传动(链条拉升量在允许范围内)地轨L1L2L3PE系统架构:3L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)45编码器信号驱动器处编码器连接为D 型插头需配15芯针型插头编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞C o s +C o s -S i n +S i n -D A T A -D A T A +T F /T H /K T Y +T F /T H /K T Y -编码器电缆颜色)TU SSEW-编码器电缆型号拖缆用:13324543非拖缆用:13324578PLC驱动器输出U,V,W硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC !)PLC驱动器输出U,V,W硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)67编码器信号驱动器处编码器连接为D 型插头需配15芯针型插头编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞C o s C o s -S i n +S i n -D A T A -D A T A +T F /T H /K T Y T F /T H /K T Y -编码器电缆颜色)TU SSEW-编码器电缆型号拖缆用:13324543非拖缆用:13324578PLC驱动器输出U,V,W将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:8在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、在调试前,必须熟读SEW控制器的系统手册,熟悉了解机械结构和可能发生的危险;
2、安装SEW的调试软件,MOVITOOLS
3、安装完成后,打开软件,软件可以在如下地址找到:开始/SEW/MOVITOOLS/MT-Manager,
或者你可以在桌面上创建一个图标,直接双击图标:
打开。
4、打开软件后,连接上调试线缆USB11A,程序的主页面的设定如下,其中PC-interface中,
选一个带(USB)标志的端口即可;
如图:
5、按上图设置完成后,点击中央的那个Update,等待扫描完成;
扫描完成后,会显示所连接的设备类型和信息,如图:
6、打开SHELL后,进行调试第一步,即输入电机参数,SEW叫电机的初始化(也叫Startup),
如下图所示,点击那个小电机的图标:
请耐心等待设备上传信息,上传完成后,会出现配置的信息总览画面,信息总览会显示最近一次你的配置信息,如果是新设备,则会显示出厂的配置信息,如图:
点击Start-up Set 1,按照向导提示输入电机数据,过程如下图所示:
选择下一步;
这个画面不用管,直接下一步;
其中ES7S 为SEW 电机尾部编码器型号,在输入的选择框中,为:
小写的x 代表0-9任意的数字;
这两个代表了热保护的类型和热保护动作时候的反应,热保护的反应可以根据用户现场实际情况进行调整;
输入完成后,点击下一步;
选使用编码器,然后下一步;
选定位控制模式,下一步;
选电流的矢量控制方式(CFC ),下一步;
按照实际,铭牌设定完成后,点击下一步即可;
这个画面就是系统根据您上一步填入的信息,计算出来的最合适的参数,点击接受建议值即可,然后点击下一步;
同样接受建议值,点击下一步;
在这里,建议先接受建议值,然后把设定值源和控制源修改为FIELDBUS(总线),再点击下一步;
点击Download完成下载,然后点击完成,确认。
7、电机初始化完成,然后配置SICK DME5000编码器;
同样,在SHELL里面,Startup,找到DIP/DEH21B Startup,如下图所示,按照向导提示输入参数即可;如下图:
点击下一步;
选择下一步;
根据所连接的编码器,选择对应的型号,然后点击下一步;
填入150,点击下一步;
选择这个,点击下一步;
选择这个,然后下一步;
手动操作,通过这个可以
再没有PLC的时候控制
伺服电机
用笔记下当前位置,一会
有用,两个都要记
用笔记下当前位置,一会
有用,两个都要记
用手动操作模式移动小车走一段距离,或者是打开制动器,用手推小车走一段距离都可以,
再几下当前位置,一会有用。
定位的P增益。
一
般接受系统建议值
定位的加减速时间
定位的最大速度,
一般为电机额定速
度的90%
设定完成后,点击下一步;
接受建议值,然后选择下一步;
点击完成,完成SICK外部编码器的配置;
8、定位模块的配置:
同样是在SHELL中,找到Extended positioning via bus;
双击进入;
如果之前配置过,则会出现:
点击 Commissioning进入重新配置,如果之前未配置过,或者点击重新配置后,则出现这个画面:
设定总线通讯参数,完成后,点击下一步;
先选择电机编码
器,设定速度单位
设定机械参数,不知道的话,问机械工程师,然后点击计算,计算后,不要着急,再在本页
面内,选择配置定位的长度单位,如下图:
在下拉菜单中选择
外部绝对值编码器
这个值怎么来
的,不要着
急,看下面关于上面设定的编码器比例,还记得上面手动操作时,要你记的数值么?
如图:
通过比较这个两个值,可以看出来,电机编码器变化了82548inc
而sick的编码器变化了10730,单位为 0.1mm
即7.6932 inc/(0.1mm),比例约为8,所以上面的位置,填入8;
设定完成后,点击下一步;
这连个地方,是填入软件限位的值的,可以根据
实际情况进行修改
这个填入定位
中的最大速度设定完成后,点击下一步;
点击否,
进入到上图的画面,点击Download,下载入设备中。
OK,一切搞定,所有的配置都已完成,可以试验定位了。