基于SPCE061A的液体点滴速度测控装置研究
用凌阳SPCE061A实现的液体点滴速度监控装置
用凌阳SPCE061A实现的液体点滴速度监控装置・羚 阳・2003年全国大学生电子设计竞赛已经结束。
本文介绍竞赛的F题。
通过凌阳16位单片机SPCE061A实现一个液体点滴速度控制系统,其中包括键盘设置、动态显示、点滴速度检测、储液瓶液面检测以及电机控制、异常情况报警等功能,并且该系统作为一个子系统能够和主系统进行通讯。
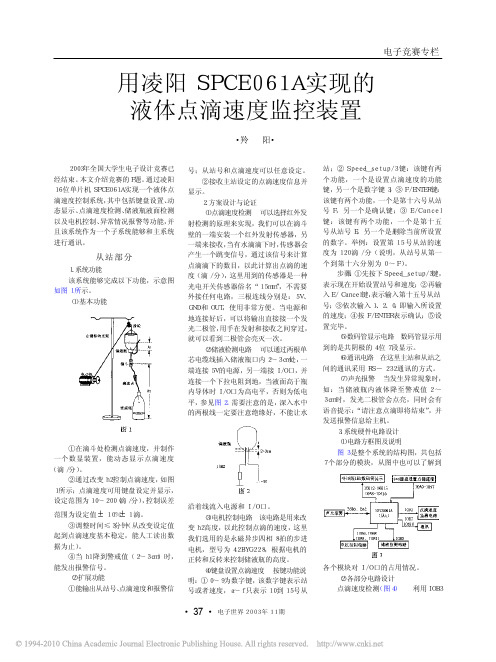
从站部分1.系统功能该系统能够完成以下功能,示意图如图1所示。
(1)基本功能①在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度(滴/分)。
②通过改变h2控制点滴速度,如图1所示;点滴速度可用键盘设定并显示,设定范围为10~200(滴/分),控制误差范围为设定值±10%±1滴。
③调整时间≤3分钟(从改变设定值起到点滴速度基本稳定,能人工读出数据为止)。
④当h1降到警戒值(2~3cm)时,能发出报警信号。
(2)扩展功能①能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
②接收主站设定的点滴速度信息并显示。
2.方案设计与论证(1)点滴速度检测 可以选择红外发射检测的原理来实现,我们可以在滴斗壁的一端安装一个红外发射传感器,另一端来接收,当有水滴滴下时,传感器会产生一个跳变信号,通过该信号来计算点滴滴下的数目,以此计算出点滴的速度(滴/分),这里用到的传感器是一种光电开关传感器俗名“15mm”,不需要外接任何电路,三根连线分别是:5V、GND和OUT,使用非常方便。
当电源和地连接好后,可以将输出直接接一个发光二极管,用手在发射和接收之间穿过,就可以看到二极管会亮灭一次。
(2)储液检测电路 可以通过两根单芯电缆线插入储液瓶口内2~3cm处,一端连接5V的电源,另一端接I/O口,并连接一个下拉电阻到地,当液面高于瓶内导体时I/O口为高电平,否则为低电平,参见图2。
需要注意的是,深入水中的两根线一定要注意绝缘好,不能让水沿着线流入电源和I/O口。
(3)电机控制电路 该电路是用来改变h2高度,以此控制点滴的速度,这里我们选用的是永磁异步四相8拍的步进电机,型号为42BYG228,根据电机的正转和反转来控制储液瓶的高度。
基于SPCE061A的液体点滴速度测控装置研究

关键 词 : 液 速度 ; 输 液住报 警 ; 测控
中图分类号:P6 + T 3 82
文献标识码 : A
文章编号 : 7 — 32 20 )1 04 — 2 1 1 5 2 ( 06 0 — 0 8 0 6
2 1 系统 结构 .
现行 医院点滴输液方法, 需值班护士经常观
察输液进展情况 , 当估计输液快完成时 , 护士便在
现 死 机现象 。 22 点滴 速度 检测 .
剩余药液 , 可以减轻护理人员的劳动负担 , 给护士 输液治疗提供方便 , 给输液病人提供可靠 的安全
保证。
根据红外发射检测 的原理实现 , 在储 液瓶 的
一
1 系统功 能
() 1 在滴斗处检测点滴速度 , 数显装 置能动 态显示点滴速度 ( m n 。 滴/ i) () 2 通过改变输液瓶高度来控制点滴速度 , 点滴速度可用键 盘设定并显示 , 设定 范围为 l O~ 20 滴/ i) 控 制误差 范 围为设 定 值 1-1% 0 ( mn , t0 - 滴。 ( )当输液瓶 内的药液降到警戒值 ( 3 离瓶 口
Vo. 9 No 1 1 1 . Ma .2 o r 06
基 于 S C 0 1 的液 体 点 滴 速 度 测 控 装 置研 究 ’ P E 6A
邸荣光 , 刘仕兵
( 华东交通大学 电气 与电子工程学 院, 昌 3 0 1 ) 南 30 3
摘 要: 介绍 了一种基 于红外检测技术 与单片机控制技术的液体点滴速度 自动测控 系统 , 阐 述 了 系统 的硬 件组 成 、 工作原 理和 软件 设 计 。它可 以实现输 液速 度 的键 盘 设 置 、 态显 示、 动 点 滴速度的检测、 输液速度的实时调节、 液瓶液面动态监视以及异常情 况报 警等功能, 储 使输液 治 疗变得 更加 方便 和安 全 。 实验 测试 结果 表 明 , 系统检 测精 度 高、 液 速 度调 节 响应 快 、 态 输 稳
基于SPCE061A的水温监控系统设计

成 了 A C、A A C放 大 电 路 等 ,是 一 颗 功 能 强 大 的 S C D D C、 G O
芯 片 。 芯 片拥 有 8 1 该 路 0位精 度 的 A C, 中一 路 为 音 频 转 D 其 换通道 , 另外 7路 可 作 为 普 通 的 A D转 换 通 道 。 可 以 实 现 简 它
Ab t a t sr c :A tr e e a u emo i r y t m e in d, ih i b s do P E0 wae mp r t r n t se i d sg e whc a e n S C 61 s mp e t r e e au eb s g t os s s A, a l s wae mp r t r yu i t n P O e s r e i n t n ef r n e va d gtl l rtc n lg n r c se h mp r t r aa va p 0 0 t n hn e r l TI 0 s n o , l mia e it r e c i i i t h oo y a d p o e s st e t e af e e i e e a u ed t i r p r o a tg a— i
d r aiec nrl rPD c nrl r. h et grs l n iaeta esse h se c l n blyi mp rtr o to. ei t o t l ( I o t l )T ets n eut idc t th ytm a x el t it t eau ec nr1 v v oe oe i s h t e a i ne
第l 9卷 第 5期
Vo. 9 11 Nto i sg n i e rn l cr nc De i n E gn e i g
基于单片机的液体点滴速度监控装置设计

( 三 )R S 一 4 8 5接 口 电路
R S 一 4 8 5 最小 型由两条信号 电路线组成 。每条连接 电路有接大地参 考点 ,这 电缆能支持 3 2个发送, 接收器对 。为了避免地 面路 电流 ,每个 设备都要接地 。这电缆包括连至每个设备 电缆地 的第三信号参考线 。
方案一 :采用直流电动机 。直流电动机具有 良好的起 、制动性能 ,
易于在广泛范围 内平滑调速 , 并且直流 电动机 的主磁通 l i 电枢 电流相互
独立 ,可以分别对它们进行控制 ,容易得到满意的动 、静态性能 。但其 不能定位 ,就是采用变速齿轮箱锁定 , 定 位也不会精确 ,而且转子发热 多 ,电 机 效 率 低 。 方案 二: 采用步进 电动机 。 步进 电动机可 以用数字信号直接进行开 环控制 ,易于起动 、停止 、 反转及变速 ,响应性也好。 ( 四 )显 示 界 面 模 块 这是决定系统使用是否方便的关键。 方案一 :采用 L E D显示 。显然这 只能显示非常有 限的符号和数码 对于本设计功能是不相适应的 。 案 二:采用点阵式 L C D显示 。这 是最为 复杂 的实现 ,需要完成 人揖的显示工作 , 但其功 能也是最 强大 的。 采用点阵式 L C D, 配合 F l a s h R OM 中的汉 字库 ,可以实现汉 字 显示 ,并将 点滴速度 显示 明确 ,使 用 户 自定义非常办便 。 权衡之后 , 我们决定选厢 方案二 , 它实现了用户设 定的实时显示 和 全 中文界 面,使界面非常之亲切 ,增强 了 人机交互性 。 ( 五 )系统 方案 框 图 £站 、从站控制系统均采用单 片机 8 _ 9 C 5 2为核心,系统框图如图 1 。 …于单片机 、_ 乜 动机 、 滴液传感器形成 了 闭环系统,反馈环节不断的进行 补偿, 系统可以达到很高的精度。考虑到从站功能全部一致 , 只画m一路。 l L ’ i _ - Ⅲ 1 r i Ⅷ _ ]i i ; l 竺 H H I r ]
基于凌阳单片机SPCE061A的红外泵液器的设计
第1卷 l
第 1 期 l
电 子元 器 件 主 用
E e t ncC mp n f & De ieAp l ain lcr i o o e t o i vc pi t s c o
Vo . 1 11 No 1 .1
巾 的 电 流 。 当 伸 出 手 时 ,接 收 部 分 收 到 的 红 外 线
的转换 ,从 而使人 机交互 更友好 ,同时也可 以表
明 当前 系 统 的 工 作 状 态 。
强 度降低 ,转换 的 电流 强度减 弱 ,拿 开手 时 ,红 外直 射到 光敏管 上 ,输 m 电流增 强 :之后 的第 二 步 .再 将 电 流信 号 的 强 弱转 换 为 能 被S C 0 1 P E 6A
黄 丽薇
f 东南大学成 贤学院 ,江 苏 南京 2 0 8) 10 8
摘 要 :红 外 泵 液 器 是 采 用 红 外技 术 感 应 人 手 , 由单 片 机 控 制 出 液 量 , 并 具 备 手 动 和 自动 两
种 泵液模 式的 自动 水暖装 置 。文 中给 出了一个 改进 的智能 方案 ,该方案 具有低 电压检 测报 警 以及 使 用完毕后语音提 示等 功能 ,并具有抗 干扰 能力强 、无误 操作 、省 电节能等特 点。 关键 词 :红 外 ;泵 液器 ;单 片机
I OB8 I B2 o
I OA4
I A5 o
现 ;第 步 ,则 是通过对 高低 电压信 号 的判断 来
S PCE0 61 A
输 H控 制 信号 ,并 将控制 信号输 出给 电机 ,再 通 :
过 电机 控制水 泵 。这部 分 主要 是 ̄ I B 的中断 检  ̄O 2 测 ,伸 手时红外 线被挡 住 ,二 极管 截止 .I B 得 三 O 2 到 高 电平 , 即利 用I B 的 上 升 沿 中 断 申请 功 能 O 2 ( 或者 使 用查 询 方 法)来 向S C 0 1 单 片 机 提 出 P E6A 放水的 中断请 求 。 通过 以上j 个操作 步骤 ,仅仅 可 以基 本完成 设 计功 能 ,而本文对 上述传 统设计 的改 进之 处有
液体点滴速度自动控制装置设计

摘要:目前,许多医院普通病房患者静脉输液过程中存在输液速度无法人性化监测和调节等问题,设计提出了一套针对不同病人的输液状况进行实时监控并能准确调节液滴速度的装置。
该系统在微改变传统输液形式的前提下,以单片机AT89C51为核心,利用红外对管传感器监测液滴每分钟滴数和液位变化,然后控制步进电机来调节液滴瓶的高低来实现对液滴滴速的控制。
该设计临床实现比较容易,具有较高的实用价值。
关键词:红外对管液滴速度AT89C51步进电机0引言静脉输液是临床治疗中最常用的,临床上一般根据药物和患者的不同情况来配以合适的输液速度,输液速度过快可能导致中毒等不良反应。
常规的临床输液,常用挂瓶输液,依靠眼睛来观察、手动夹具来控制输液速度,这种传统的输液方式并不能精确的控制输液速度,并且工作量大,造成较多的人力资源浪费。
本设计就是为了解决上述的人力资源浪费以及输液速度问题而设计的液体点滴速度自动控制装置。
1自动控制装置硬件设计1.1点滴速度测量采用红外对管来发射和接收点滴信号,采用断续式的工作方式,当液滴滴下时阻挡了红外接收管接收红外线,从而产生一个高电平脉冲信号。
红外对管检测液滴原理图如图1.1所示:图1.1红外对管检测液滴原理图由于红外光产生的光信号较弱,其接收管接收的信号更是十分微弱,相当于毫伏级的电压。
所以必须经过放大电路将其放大到系统能识别的信号。
本设计采用集成运算放大器LM324构成的同向交流放大器。
经过放大电路处理后的信号并不标准,单片机并不能直接识别,因此需要使用电压比较器将不标准的脉冲信号转化为标准的脉冲信号,采用集成电压比较器LM339实现。
1.2液位检测当点滴液位低于警戒线以下时必须发出声光报警。
在这种情况下,关键是如何检测液面高度。
检测方法与液滴测量相同,仍然使用红外对管来发射接收液滴信号。
根据红外接收管接收的光强度的大小,来确定是否达到警戒线水位。
由于红外光通过空气和水的光强不同,因此吸收系数也有不同,当液位高度低于警戒线(离瓶口2-3cm )时,红外对管会接收到信号,即为报警信号,此时蜂鸣器报警。
F6设计题目液体点滴速度监控装置
F6设计题目:液体点滴速度监控装置参赛学校:山东农业大学参赛学生:王涛李晓军于伯建2003年全国大学生电子设计大赛说明书2003年9月17日设计题目:液体点滴速度监控装置一、摘要本系统采用分布式微机控制系统,通过调整输液瓶的高度来精确控制最多可达16个输液器的点滴速度。
系统采用主从式结构,都采用89s52作为CPU。
从机通过光敏元件测定点滴速度,并通过步进电机调整输液瓶高度,构成了一个闭环控制系统。
可通过键盘设定所需点滴速度,设定范围可达20~150滴/分,调整误差≤ 5%,调整时间≤2分钟。
并可动态显示实时点滴速度。
当液面下降到2~3cm的警戒值时,可进行声光报警。
主从站之间通过RS-485总线构成串行通讯网络。
主站可对16个从站进行定点或巡回监测,查询各从站的实时状态,并可显示其从站号和点滴速度,并可远程设定各从站的点滴速度,当收到从站发来的报警信号后,能声光报警并显示相应的从站号,并可手动方式解除报警。
该系统布局合理,运行平稳,控制精度较高,完全达到了题目基本部分的要求,并基本实现了发挥部分要求。
二、系统方案确定1、总方案:分析题目要求,系统为一个主从式测控系统。
由通讯网络把主站和多个从站连成一个系统。
通讯网络可采用RS-232或RS-485等接口组成。
测控从站的功能可有多种方案实现,但一般都都由控制单元、执行机构和检测单元三部分组成。
下面具体论述分析一下各个部分的方案确定。
2、通讯方案的确定通讯网络可选用RS-232或RS-485。
RS-232系统的通讯距离一般小于15米,而RS-485的通讯距离可达1000多米。
考虑到本系统模拟的医院病房的实际情况,15米不能满足要求,故采用了RS-485系统3、执行机构方案的确定小型执行机构的驱动元件一般选择直流电机或步进电机。
其中直流电机使用方便,价格便宜,但运动精度较低,难以实现精确的位置控制。
如用直流电机调整输液瓶的高度,将难以控制其精确位置,系统稳定性较差,较难达到题目的要求。
基于内压式点滴输液流量智能检测系统研究
s i o n AI D c o n v e  ̄e d i n t o di gi t a l s i g n a l s s en t t o t h e CP U f or pr o c e s s i n g T h e Pr oc e s s e d d a t a t o f l o w i n t h e
Abs t r a c t :I n t h i s pa p er . a n e w t y p e of pr e s s u r e s e n s o r s b a s e d o n 2 6 PCBF A6D d r i p i n f u s i on f l o w d e t e c t i on
K e y w or d s : Pr e s s u r e Se n s O r : 1 n l er n a l pr e s s ur e me t h od; F l o w De t e c t i O n : Dr 0 p t r a n s f u s i on
摘 要: 该文阐述并研制 了一种新 型的基 于 2 6 P C B F A 6 D型压力传感器的点滴输液流量检测 系统 。 该系统 采用内部压力法将微弱的压力变化量转换 为电压输 出 ,此 电压经滤波处理后 再经放大调理 电路进行多
级放大 ,放大后 的理想信号最后经 A V R单片机 自带的高精确 A / D转换成数字信号送至 C P U进行处理 。
易红永, 王小 平 ( 五 邑大 学 , 广 东 江门 5 2 9 0 2 0 )
Yi Hon g - y o ng , Wa n g Xi a o -p i n g ( Wu Y i Un i v e l s i t y , ( ; u a n g d o n g J i a n g me n 5 2 9 0 2 0)
基于单片机系统的液体点滴速度监控装置的设计
T c n l g n p l c t o s・技术 应 用 e h o o y a d A p a n i i
【 ew rs】na d esr ilsrnmsi ou sA 8S 2 C K y od Ir no; re s i o m dl ;T9 5 M fr s e west a sn e S
O 引 言 .
应 用水 的压强 随 着高 度差 的变 化 而变化 的 原理 , 用直 流 利 电动 机 调节储 液瓶 的 高度来 控 制点 滴速 度 。 盘系 统作 为独 立 键
T n h ny n u h n - n u S u -e e gC u - g S nC a g i g S i h nk a j a
( c o l fno maina dElcr a E gn eig C iaUnv ri f nn n e h oo y in s S h o o Ifr t n o e tc l n ie r , hn iest i n yo Miiga d T c n lg Ja g uXu h u2 — - — ・ ■
式按键系统, 可用来设定点滴速度 , 红外对射式传感器 的功能
是 实 时检 测 到液 滴 , 并将 数 据送 给 单片 机 处理 , 变 成液 滴 速 转
回
・
度 , 与设定值进行 比较, 通过 经单片机处理后产生控制信号 , 控
制 电机 的转 动 , 而 调节 储 液 瓶 的高 度 , 变 点 滴 速 度 , 到 自 进 改 达 动调 节 的 目的 。同 时 , 在储 液 瓶 水位 到 达 警 戒线 ( 3m ) 下 2 c 以  ̄ 时 能 发 出报 警 信 号 , 线 传 输模 块 传 到 远 处 , 生 相 应 的报 经无 产
基于SPCE061A智能磁性液体表观密度仪控制系统
基于SPCE061A智能磁性液体表观密度仪控制系统
王蔚;李学慧
【期刊名称】《实验室研究与探索》
【年(卷),期】2011(030)001
【摘要】介绍以SPCE061A单片机为控制器的磁性液体表观密度仪控制系统,用以满足工业设计中复杂的数据采集需要.该系统由SPCE061A单片机控制,通过力敏传感器单元与PC系统通信,设计数据处理方法并编写相应的计算程序和交互式的窗体界面,用户可根据实际测量要求对实测软件进行设置,从而实现对实验数据读取、处理和曲线绘制、显示、打印、保存等功能.同时,用户可远程登录计算机,进入系统设置实测软件,远程进行数据采集,并能得到实时的采集结果,故系统具有扩展性.该系统控制简单、成本低,适用于教学和科研中的数据采集.
【总页数】3页(P11-13)
【作者】王蔚;李学慧
【作者单位】大连大学,物理科学与技术学院,辽宁,大连,116622;大连大学,物理科学与技术学院,辽宁,大连,116622
【正文语种】中文
【中图分类】TP274.2
【相关文献】
1.基于SPCE061A的智能轮椅避障控制系统的设计 [J], 牛凤英;张华;刘继忠;吴学沛
2.基于SPCE061A的智能轮椅控制系统硬件设计 [J], 郝敏钗
3.基于SPCE061A的舞台灯智能控制系统设计 [J], 易金桥;孙先波;谭建军;艾青
4.基于凌阳SPCE061A的智能小车语音控制系统 [J], 李新梅
5.基于SPCE061A的空调智能控制系统的设计 [J], 赵强
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ S ] 梁维铭, 黄劲L 输液速度自动控制系统 [ /] L 广西科学院学报, !EE! , ( SS ) : !SS # !SDL [ ! ] 薛钧义, 张彦斌L 凌阳 V SN 位单片机原理及其应用 [ 6] L 北京: 北京航空航天大学出版社, !EE"V [ " ] 袁涛L 单片机 , 高级语言程序设计极其应用 [ 6] L 北京: 北京航空航天大学出版社, !EE"V
图 2" 主程序流程图 !"#$ 2" !4&7 2"3#53’ &5 *-. ’3"+ (5&6.215.
图 ." 声光报警电路 !"#$ ." 0&1+2 3+2 4"#-* # 3435’"+# 6"561"*
万方数据
( 下转第 02 页)
第S 期
陆洪彬等: 79! J" # 8+J! 料浆流变性能的研究
2" 软件设计
整个程序需要处理的任务较多, 因此采用模 块化编程, 本系统软件设计采用的是 + 和汇编混 合编程实现, 由主控模块、 键盘输入模块、 滴速测 量模块、 液位检测模块、 液晶显示模块、 步进电机 控制模块、 看门狗模块组成, 主程序在完成所有初 始化工作后, 开始查询键盘输入状态, 检测输液速 度, 设定值和测量值有偏差时, 调用步进电机控制 子程序, 各功能模块完成后又返回查询键, 其流程 图如图 2 所示。
基于 !"#$%&’( 的液体点滴速度测控装置研究
邸荣光, 刘仕兵
( 华东交通大学 电气与电子工程学院, 南昌) **%%’* )
!
摘) 要: 介绍了一种基于红外检测技术与单片机控制技术的液体点滴速度自动测控系统, 阐 述了系统的硬件组成、 工作原理和软件设计。它可以实现输液速度的键盘设置、 动态显示、 点 滴速度的检测、 输液速度的实时调节、 储液瓶液面动态监视以及异常情况报警等功能, 使输液 治疗变得更加方便和安全。实验测试结果表明, 系统检测精度高、 输液速度调节响应快、 稳态 误差小。 关键词: 输液速度; 液位报警; 测控 中图分类号: +"*&,- .) ) 文献标识码: () ) ) 文章编号: ’&/’ 0 1*.. ( .%%& ) %’ 0 %%2, 0 %. ) ) 现行医院点滴输液方法, 需值班护士经常观 .- ’) 系统结构 点滴速度测控系统结构框图如图 ’ 所示。主 要包括单片机系统、 液滴检测、 液位检测、 小键盘 控制、 报警输出。步进电机控制、 看门狗等电路。 单片机系统选用 !"#$%&’(, 它的时钟最高可达 2;<, *. 个 = 3 > 口, 具有丰富的中断资源, 而且具 有一定的语音处理功能, 使整个设计更加智能, 此 外, 利用 !"#$%&’( 具有 “ 看门狗” 功能, 避免出 现死机现象。 .- .) 点滴速度检测 根据红外发射检测的原理实现, 在储液瓶的 一侧安装一个红外发射传感器, 另一侧接受, 当有 药液滴下时, 传感器会产生一个跳变信号, 通过该 信号来计算点滴滴下的数目, 以此计算出点滴的 速度 ( 滴 3 456) 。 .- *) 键盘设置点滴速度 采用 2 ? 2 小键盘, 输入所设置的输液速度。 .- 2) 步进电机控制电路 当单片机检测到的输液实时速度与设定值有 偏差时, 则执行相应的控制算法, 通过步进电机控 制输液瓶的高度来调节输液速度, 当输液速度低 于设定值时, 电机反向转动提升输液瓶高度从而 增加滴速; 反之, 当输液速度高于设定值时, 电机
( ,’99:): ’; 60<:=+09 -()+(::=+(), >0(?1:() @(A<+<2<: ’; 8:?1(’9’)B, /+0()A2 >0(?1:()C !!DEE" , ,1+(0) !74#30/#: 81: :;;:?< ’; F+99 <+F:, G+AH:=A0(< ?’(<:(< 0(G A’9+G I’92F: ;=0?<+’( ’( =1:’9’)+?09 *:10I+’=A ’; 79! J" # 8+J! A92==B K:=: +(I:A<+)0<:GL 81: =:A29<A A1’K:G <10< <1: I+A?’A+<B ’; 79! J" # 8+J! A92==B K0A ’(9B MN FO0・A 0(G <1: A’9+G+;+?0<+’( <+F: K0A "NEA 0;<:= 0GG+() A’9+G+;+:G 0):(< K1:( <1: F+99 <+F: K0A D1, <1: 0GG+<+I: ’; G+AH:=A0(< K0A "P ( F0AA ;=0?<+’( ’; A’9+G) , 0(G <1: A’9+G I’92F: ?’(<:(< K0A DQP L 7(G <1+A A92==B ’*<0+(:G <1: *:A< ;92+G H:=;’=F0(?: 0(G 0*2(G0(< A’9+G+;+?0<+’( <+F:, K0A H=’H+<+’2A <’ ):9?0A<+()L 8+&9’3%4: A2AH:(A+’(; =1:’9’)+?09 *:10I+’=A; ):9?0A<+(); 092F+(+2F <+<0(0<: C C C C C C C C C C C C C C C
第 ’; 卷 第 ’ 期 .%%& 年 * 月
盐城工学院学报 ( 自然科学版) @ABC6DE AF GD6:HI6J =6KL5LBLI AF +I:H6AEAJM ( NDLBCDE !:5I6:I)
OAE- ’; NA- ’ <DC- .%%&
"""""""""""""""""""""""""""""""""""""""""""""
( 上接第 DR 页) 速度能在 SE T !EE ( 滴 U F+( ) 范围内连续可调, 稳 态误差小、 储液瓶的液位监视报警输出信号可靠、 准确。此外该系统可以作为一个子系统能够和医 院的病床综合实时自动巡检系统进行通讯。具有 较高的实用价值。
DC 结束语
输液速度自动测控系统可以实时监测每个病 床病人的输液速度, 并在储液瓶中药液滴完时发 出报警; 还可以根据护士通过键盘设定的参数, 自 动精确调节输液速度。实验结果表明, 系统输液 参考文献:
C ・C Q"C ・
"""""""""""""""""""""""""""""""""""""""""""""
! "#$%& ’( )*+’,’-./0, 1+*02.’34 ’( !,! 5" &’() # *+(, ,&-. /+0( # 120, 3-.4 ,12( # 5+0, 67 80’
万方数据
基于SPCE061A的液体点滴速度测控装置研究
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 被引用次数: 邸荣光, 刘仕兵, DI Rong-guang, LIU Shi-bing 华东交通大学,电气与电子工程学院,南昌,330013 盐城工学院学报(自然科学版) JOURNAL OF YANCHENG INSTITUTE OF TECHNOLOGY(NATURAL SCIENCE EDITION) 2006,19(1) 1次
察输液进展情况, 当估计输液快完成时, 护士便在 病床边等候, 以便完成后及时更换药瓶。并且都 是由护士通过转动输液器上的手动滑轮来控制液 体流速的, 人工调整点滴速度不够准确和方便, 而 且输液结束后不易及时发现。本文提出一种基于 红外检测技术、 利用单片机控制的点滴速度自动 测控系统, 实现输液速度实时调节和显示, 并监视 剩余药液, 可以减轻护理人员的劳动负担, 给护士 输液治疗提供方便, 给输液病人提供可靠的安全 保证。
图 !" 系统组成框图 !"#$ !" %&’(&)"*"&+ &, *-. )/)*.’
正向转动降低输液瓶高度从而降低滴速, 使之保 持在要求的控制范围之内。 本系统选用四相八拍的永磁步进电机来控制 输液软管。步进电机很容易用单片机实现数字控 制, 定位精确且具有自锁能力。通过单片机按顺 序给绕组施加有序的脉冲电流, 就可控制电机的 转动, 从而进行了数字 # 角度的转换。本系统中 单片机的 $%&’ 、 $%&( 、 $%&) 、 $%&!! 分别接步进电 机的 *、 &、 +、 ,- 个绕组, 以四相八拍方式工作。 ./ 0" 储液检测及声光报警电路 用两根单芯电缆线插入储液瓶口内 . 1 2 34 处, 一端连接 05 电源, 另一端接 $ 6 % 口, 并连接 一个下拉电阻到地, 当液面高于瓶内倒替时 $ 6 % 为高电位, 否则为低电位。如果储液瓶液位高度 降到了警戒值 ( 离瓶口 . 1 2 34 ) 时, 单片机接受 液位检测电路发来地中断请求信号, 立即发出声 光报警。 声音报警部分, 直接采用 78+9:’!* 的 ,*+ 输出经过功放、 喇叭播放出来; 光报警是通过点亮 二极管来实现的: 当储液瓶内液体降至警戒值 . 1 2 34 时, $%&% 会输出一个高电平点亮发光二 极管 ( 图 . 所示) , 其中限流电阻采用的是 22: -。