三相鼠笼式异步电动机正反转控制实验报告
三相鼠笼式异步电动机实验报告
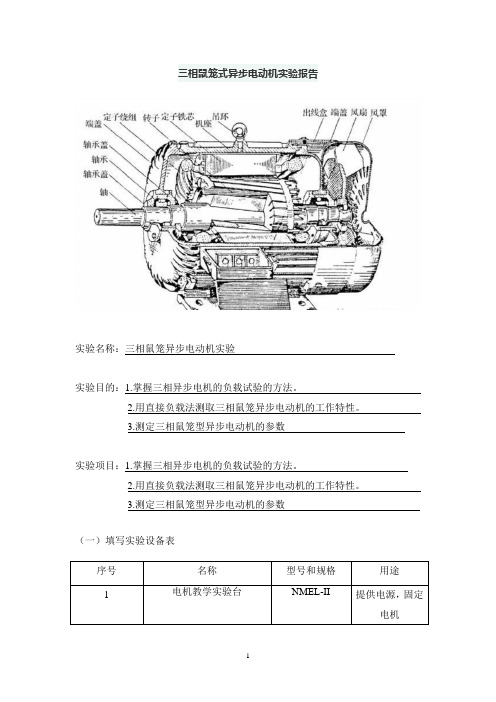
三相鼠笼式异步电动机实验报告
实验名称:三相鼠笼异步电动机实验
实验目的:1.掌握三相异步电机的负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相鼠笼型异步电动机的参数
实验项目:1.掌握三相异步电机的负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相鼠笼型异步电动机的参数
(一)填写实验设备表
序号名称型号和规格用途
1 电机教学实验台NMEL-II 提供电源,固定
电机
(二)测量定子绕组的冷态直流电阻填写实验数据表格
(三)测取三相异步电动机的运行特性填写实验数据表格
(四)问题讨论
1.如何判断出定子三相绕组的首末端?
答:通电试验法:先用万用表的欧姆档将六个引线头分成三组,然后将任意两组串联接在交流电源上,第三组上串联一个灯泡(15或25W,大功率不亮)。
通电后,如果灯泡发亮,表示串联的两组为首尾相接;如果灯泡不亮,表示尾尾相连或首首相连,以此类推。
2. 三相笼型异步电动机的起动方法有几种?
答:Y-△启动、三相电阻降压启动、自耦变压器降压启动、软启动器降压
3. 三相异步电动机的运行特性是指哪些特性?
4. 实验的体会和建议
答:通过本次实验,让我知道了三相异步电动机的工作原理和工作特性,以及通
过改变接线方法,来改变启动方式等。
在将来的实际应用中有了坚实的理论基础。
鼠笼式三相异步电动机实验报告
鼠笼式三相异步电动机实验报告鼠笼式三相异步电动机诱导实验报告鼠笼式三相异步电动机实验是研究三相异步电机运行原理及学习电动机控制、调试、安装、维修等知识的必备实验。
本报告记录浙江理工大学自动化学院实验室鼠笼式三相异步电动机的诱导实验操作。
一、实验目的1、了解并理解三相异步电机的工作原理。
2、熟悉三相异步电动机各部件及联接方式。
3、掌握三相异步电动机调试流程及方法。
二、实验仪器1、主电机:90KW、380V、50HZ、鼠笼式三相异步电动机;2、驱动电路板:JL-CY-2004驱动板;3、电能表:三相正弦正向表;4、示波器:GW600R示波器;5、电器成套仪表:断路器、接触器、时间继电器;6、PC机:8086微机。
三、实验步骤1、准备工作:检查实验电路的各接线端子的接触性,确认有无漏电;2、调试:用电器成套仪表控制开关,根据驱动电路板上的指示灯的变化来调试,直至最终实现三相异步电机的暂态启动;3、功率试车:用电能表注入电量并记录数据;4、检查电量变化:用示波器测量电压,改变负载状态,查看电量变化,观察其稳定性;5、断路检查:用PC机控制开关,断开断路器,检查电机运行情况。
四、实验结果实验中,由于熟悉电器仪表的操作方法和遵从各种调节要求,成功地完成了暂态调试,驱动电路板的指示灯几乎都可以熟悉的工作;调试过程中,有功率试车,判断电动机的功率和电能。
实验结束时,测量台上电压和电流稳定,说明试验成功。
五、实验结论通过本次实验,我们已经熟悉了鼠笼式三相异步电动机的工作原理,并掌握了三相异步电动机调试的方法,也掌握了三相异步电动机的功率试车方法,完成了电动机的暂态调试。
本次实验验证了三相异步电动机的实验研究、调试及实际工作的可行性。
三相鼠笼式异步电动机点动控制、自锁控制和正反转控制
实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制1. 通过对三相鼠笼式异步电动机点动控制和自锁控制路线的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制路线的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制路线故障的方法。
1. 继电─接触控制在各类生产机械中获得广泛地应用,但凡需要进行先后、上下、摆布、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电先后触头的动作状态,分动合〔常开〕、动断〔常闭〕两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
〔1〕自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以到达电动机的长期运行,这一动合触头称为“自锁触头〞。
〔2〕互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了防止正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的路线中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
电气互锁○1为了防止接触器KM1 〔正转〕、 KM2 〔反转〕同时得电吸合造成三相电源短路,在KM1〔KM2〕线圈支路中串接有KM1〔KM2〕动断触头,它们保证了路线工作时KM1、KM2不会同时得电〔如图30-1〕,以到达电气互锁目的。
电工实习报告--鼠笼式异步电动机的正反转控制
电工实习报告--鼠笼式异步电动机的正反转控制鼠笼式异步电动机的正反转控制
鼠笼式异步电动机是一种常用的在多个领域中得到广泛应用的发电和传动机器。
它是
以采用两个完全不对称的鼠笼式绕组组成定子与旋转子并利用多个开关(如三相桥断开开关、换向开关等)控制电动机旋转方向而发展起来的。
它能够实现调节速度,正反转控制,功率传输,供电及保护功能等。
本文探究鼠笼式异步电动机的正反转控制原理与操作步骤。
正反转控制是鼠笼式异步电动机能够实现的一种基本操作方法,它是利用多个开关控
制电动机正反转方向的实现原理而控制了电动机的正反转运转。
根据鼠笼式异步电动机的
实际结构和运动原理,其控制电动机正反转,可分为两个部分:一部分是控制断路器的状态,另一部分是改变电动机的接线,调整它们形成新的电路组合,从而达到调整电动机运
行方向的目的。
控制断路器状态的方法通过操纵断路器在开和合之间进行切换来调整电动机的运行方向,当变压器的空开处于断开状态时电动机就可以运行起来,并可以看到它的定子和励磁
绕组产生电流,从而使转子得到转动。
当保护电路断路器处于合闸状态时,空开将会断开,从而降低电动机的旋转方向。
不同的断路器状态,电动机的旋转方向也不同。
其次,改变电动机接线的方法旨在改变电动机定子和转子的接线,调整它们形成新的
电路组合,从而达到调整电动机运行方向的目的。
当把电动机的起动端与定子的接线处于
开路状态时,定子的空载电流和转子的空载电流视同一正,从而使转子顺时针旋转。
此时,若把定子与转子接线处重新接线,即转子旋转方向就可以改变。
三相鼠笼式异步电动机正反转控制实验报告
三相鼠笼式异步电动机正反转控制实验一、设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1、掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2、掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3、学会分析、排除继电器劫持控制线路故障的方法。
4、要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。
电机正反转接线实验报告
电机正反转接线实验报告电机正反转接线实验报告电机正反转接线实验报告一、实验目的1、掌握三相异步电动机正反转的原理和方法。
2、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制线路的不同接法。
二、实验设备三相鼠笼异步电动机、继电接触控制挂箱等三、实验方法1.为了使电动机能够正转和反转,可采用两只接触器KM1、KM2换接电动机三相电源的相序,但两个接触器不能吸合,如果同时吸合将造成电源的短路事故,为了防止这种事故,在电路中应采取可靠的互锁,上图为采用按钮和接触器双重互锁的电动机正、反两方向运行的控制电路。
2.为了使电动机能够正转和反转,可采用两只接触器KM1、KM2换接电动机三相电源的相序,但两个接触器不能吸合,如果同时吸合将造成电源的短路事故,为了防止这种事故,在ABCFR1KM1KM2Q1L1220VL2L3FU1FU2FU3FU4KM2KM1KM1KM1KM电路中应采取可靠的互锁,上图为采用按钮和接触器双重互锁的电动机正、反两方向运行的控制电路。
三、互锁环节:具有禁止功能在线路中起安全保护作用1、接触器互锁:KM1线圈回路串入KM2的常闭辅助触点,KM2线圈回路串入KM1的常闭触点。
当正转接触器KM1线圈通电动作后,KM1的辅助常闭触点断开了KM2线圈回路,若使KM1得电吸合,必须先使KM2断电释放,其辅助常闭触头复位,这就防止了KM1、KM2同时吸合造成相间短路,这一线路环节称为互锁环节。
四、电动机正向(或反向)启动运转后,不必先按停止按钮使电动机停止,可以直接按反向(或正向)启动按钮,使电动机变为反方向运行。
五、电动机的过载保护由热继电器FR完成。
三.注意事项1、检查主回路路的接线是否正确,为了保证两个接触器动作时能够可靠调换电动机的相序,接线时应使接触器的上口接线保持一致,在接触器的下口调相。
2、检查接线无误后,通电试验,通电试验时为防止意外,应先将电动机的接线断开。
扩展阅读:电机正反转接线图5电机正反转接线图为了使电动机能够正转和反转,可采用两只接触器KM1、KM2换接电动机三相电源的相序,但两个接触器不能吸合,如果同时吸合将造成电源的短路事故,为了防止这种事故,在电路中应采取可靠的互锁,上图为采用按钮和接触器双重互锁的电动机正、反两方向运行的控制电路。
三相异步电动机正反转控制实验报告
三相异步电动机正反转控制实验报告
一、实验目的
1、掌握三相异步电动机正反转的原理和方法。
2、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制线路的不同接法。
二、实验设备
三相鼠笼异步电动机、继电接触控制挂箱等
三、实验方法
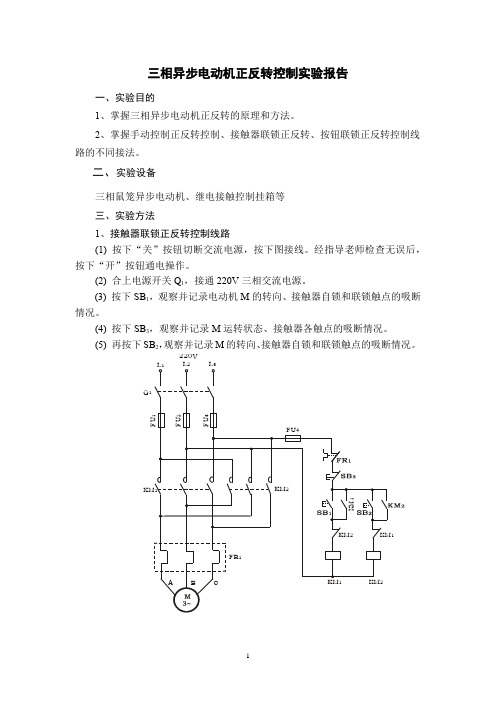
1、接触器联锁正反转控制线路
(1) 按下“关”按钮切断交流电源,按下图接线。
经指导老师检查无误后,按下“开”按钮通电操作。
(2) 合上电源开关Q 1,接通220V 三相交流电源。
(3) 按下SB 1,观察并记录电动机M 的转向、接触器自锁和联锁触点的吸断情况。
(4) 按下SB 3,观察并记录M 运转状态、接触器各触点的吸断情况。
(5) 再按下SB 2,观察并记录M 的转向、接触器自锁和联锁触点的吸断情况。
Q 123220V
图1 接触器联锁正反转控制线路
3、按钮联锁正反转控制线路
(1)按下“关”按钮切断交流电源。
按图2接线。
经检查无误后,按下“开”按钮通电操作。
(2) 合上电源开关Q 1,接通220V 三相交流电源。
(3) 按下SB 1,观察并记录电动机M 的转向、各触点的吸断情况。
(4) 按下SB 3,观察并记录电动机M 的转向、各触点的吸断情况。
(5) 按下SB 2,观察并记录电动机M 的转向、各触点的吸断情况。
图2 按钮联锁正反转控制线路
四、分析题
1、接触器和按钮的联锁触点在继电接触控制中起到什么作用? Q 1220V。
三相鼠笼式异步电动机正反转控制实验报告
三相鼠笼式异步电动机正反转控制实验报告【实验目的】⑴了解三相异步电动机接触器联锁正反转控制的接线和操作方法。
⑵理解联锁和自锁的概念。
⑶掌握三相异步电动机接触器的正反转控制的基本原理与实物连接的要求。
【实验器具】三相异步电动机、万能表、联动空气开关(QS1)、单向空气开关(QS2)、交流接触器(KM1,KM2)、组合按钮(SB1,SB2,SB3)、端子排7副、导线若干、螺丝刀等。
【实验原理】三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
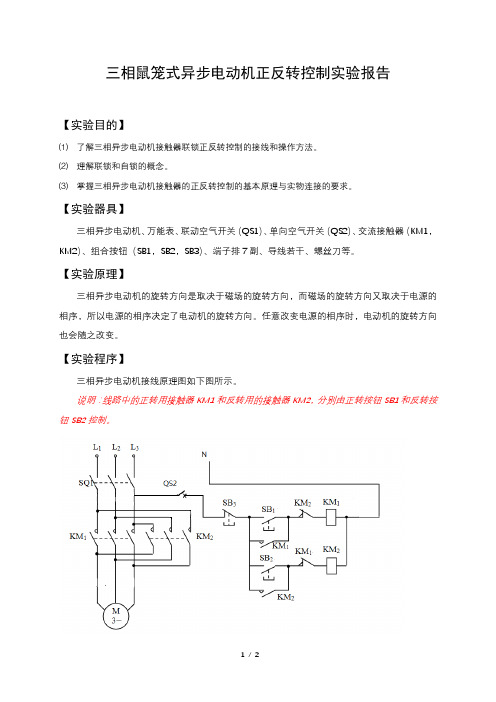
【实验程序】三相异步电动机接线原理图如下图所示。
说明:线路中的正转用接触器KM1和反转用的接触器KM2,分别由正转按钮SB1和反转按钮SB2控制。
当按下正转启动按钮SB1后,电源相通过空气开关QS1,QS2和停止按钮SB3的动断接点、正转启动按钮SB1的动合接点、接触器KM和其他的器件形成自锁,使得电动机开始正转,当按下SB3时,电动机停止转动,在按下SB2时,接触器KM和其他的器件形成自锁反转。
1.在连接控制实验线路前,应先熟悉各按钮开关、交流接触器、空气开关的结构形式、动作原理及接线方式和方法。
2.在不通电的情况下,用万用表检查各触点的分、合情况是否良好。
检查接触器时,特别需要检查接触器线圈电压与电源电压是否相符。
3.布线时要符合电气原理图,先将主电路的导线配完后,再配控制回路的导线;布线时还应符合平直、整齐、紧贴敷设面、走线合理及接点不得松动。
4.实验接线前应先检查电动机的外观有无异常。
5.按三相异步电动机原理图检验控制板布线正确性,一般可采用万用表进行校线,以确认线路连接正确无误。
6.在断开所有开关时,用验电笔检查控制线路的主板及进线端是否有电,然后通电检验各触点是否带电。
7.闭合空气开关QS1和QS2,按下启动按钮SB1,观察线路和电动机运行有无异常现象,并观察电动机控制电器的动作情况和电动机的旋转方向。