汽车测速及倒车提示产品介绍及电路原理
汽车速度表 原理

汽车速度表原理汽车速度表是汽车上常见的仪表之一,用于显示汽车当前的行驶速度。
它通过测量车辆轮胎转动的圈数或者车轮转速,并通过一系列的传感器和电子设备将转速转化为相应的速度数值,最终显示在驾驶员的仪表盘上。
汽车速度表的原理基于车轮的转速和轮胎的直径之间的关系。
当车辆行驶时,车轮会转动,每转动一圈表示车辆行驶了一定距离。
而车轮的转速可以通过传感器感知到,传感器会将转速信号传输给车辆的电控单元。
电控单元会根据车轮转速和轮胎直径的关系,计算出车辆的实际速度,并将速度数值传递给仪表盘上的速度表进行显示。
车轮转速的测量可以通过不同的方式实现。
一种常用的方式是使用磁性传感器。
磁性传感器通常安装在车辆的传动轴或者传动轮上,它可以感知车轮旋转时产生的磁场变化。
当车轮旋转时,磁性传感器会感知到这些变化,并将信号传输给电控单元。
电控单元会根据接收到的信号来计算车轮转速,并进一步转换成车辆的速度。
另一种常用的测量车速的方法是使用车轮的转角传感器。
转角传感器通常安装在车轮的转动轴上,它可以感知车轮转动时的转角变化。
当车轮转动时,转角传感器会感知到车轮的转动情况,并将转角信号传输给电控单元。
通过计算车轮转角的变化量和车轮直径的关系,电控单元可以准确地计算出车辆的速度,并将速度数值传递给速度表进行显示。
除了以上介绍的传感器外,还可以使用其他的传感器来测量车辆的速度。
例如,一些车辆会使用车轮的压力传感器来测量车辆的速度。
压力传感器可以感知车轮与地面接触时产生的压力变化,通过测量压力变化的频率和幅度,电控单元可以计算出车辆的速度。
汽车速度表的准确性是非常关键的,它直接影响着驾驶员对车辆行驶状态的判断和驾驶决策。
因此,汽车制造商在设计和生产速度表时会进行严格的校准和测试,以确保速度表的准确性和可靠性。
此外,驾驶员在日常使用中也应该定期检查和校准车辆的速度表,以确保其正常工作。
汽车速度表是一种基于车轮转速和轮胎直径关系的测速仪表。
它通过传感器和电子设备将车辆的转速转换为相应的速度数值,并通过仪表盘上的显示器展示给驾驶员。
了解汽车故障诊断仪的工作原理与使用方法
了解汽车故障诊断仪的工作原理与使用方法标题:汽车故障诊断仪的工作原理与使用方法引言:汽车故障诊断仪(简称“诊断仪”)是一种用于检测和诊断汽车故障的工具,它可以通过连接到汽车的诊断接口,读取汽车的故障码和传感器数据,并提供详细的故障诊断报告。
本文将详细介绍汽车故障诊断仪的工作原理和使用方法。
一、工作原理:1. 诊断仪的结构和组成:- 外壳:通常由工程塑料制成,具有一定的防水、防尘性能。
- 主板:是诊断仪的核心部件,包括计算单元、存储单元、显示单元等。
- 连接线:用于将诊断仪连接到汽车的诊断接口。
- 显示屏:通常为彩色液晶屏幕,用于显示汽车的故障码和传感器数据。
- 控制按钮:用于操作诊断仪的菜单、选项等。
2. 工作原理:- 连接汽车:首先,将诊断仪的连接线插入汽车的诊断接口,通常位于驾驶室内的驾驶员座椅下方。
- 读取数据:一旦诊断仪与汽车成功连接,它会读取汽车电子控制单元(ECU)中存储的故障码和传感器数据。
- 故障诊断:诊断仪通过分析故障码和传感器数据,确定汽车存在的故障类型和位置。
- 显示报告:诊断仪将诊断结果以文字、图表等形式显示在屏幕上,并提供诊断报告的打印、保存等功能。
二、使用方法:1. 准备工作:- 确认诊断接口位置:不同汽车品牌和型号的诊断接口位置不同,需要查阅汽车制造商的说明书或互联网上的相关资料。
- 确认诊断仪的适用范围:不同的诊断仪适用于不同品牌和型号的汽车,选择适合的诊断仪。
- 检查诊断仪电量和存储空间:确保诊断仪具备足够的电量和存储空间,以免无法正常工作或存储诊断报告。
2. 连接诊断仪:- 关闭汽车发动机:在连接诊断仪之前,确保汽车的发动机已经关闭,以免给诊断仪或汽车的电子系统带来损坏。
- 插入连接线:将诊断仪的连接线插入汽车的诊断接口,确保连接稳固,避免松动或掉落。
3. 诊断故障:- 启动诊断仪:按下诊断仪上的电源按钮,启动诊断仪,并等待它完成自检和初始化。
- 选择诊断功能:根据诊断仪的菜单选项,选择相应的诊断功能,如读取故障码、查看传感器数据等。
红外线反射式倒车防撞报警器_2009.10

红外线反射式倒车防撞报警器红外线倒车防撞电路安装在车辆尾部保险杠上,当车辆倒车遇到障碍物时,防撞报警器发出声光警示信号,可防止倒车时发生碰撞事故。
红外线反射式倒车防撞报警器电路组成如图6-50 所示。
电路工作原理分析红外线反射式倒车防撞报警器电路由红外信号发射器,红外信号接收及信号处理电路和声光警示电路组成。
锁相环音频译码器LM567 与红外发射管LED1 、LED2 组成红外信号发射电路。
在同一电路内由光敏三极管PH2025 组成红外反射信号接收器。
LM567 为红外发射信号的调制器兼接收信号的接收与解调器,经接收解调后的信号由⑧脚输出,其输出控制信号的形式为低电平。
时基集成电路NE555 与R6 、R7 及C7 组成一个多谐振荡器,发光二极管LED3 、蜂鸣器及VT3 、指示灯等元器件组成了声光警示电路。
车辆倒车时,本电路的电源被接通,LM567⑤脚输出的频率为20kHz 的脉冲信号,经VT1 放大后驱动LED1 ,LED2 发出经调制的红外信号,当红外接收管VT2 没有接收到红外信号时,LM567的⑧脚输出高电平,使得NE555 的复位端④脚也为高电平,由NE555等元器件组成的多谐振荡器起振,发光二极管LED3 闪烁发光,蜂鸣器随着LED3 同步间断发声,小灯泡在VT3 的驱动下也同步闪光。
当车辆的尾部距离障碍物过近时(小于1m) ,LED1 、LED2 发出的红外信号经障碍物的反射被红外接收管接收到并转换成电信号,20kHz 的电信号送入LM567 的信号输入端③脚,LM567 的⑧脚输出低电平,NE555 的复位端④脚受到低电平控制,振荡器停止工作,其③脚输出低电平,LED3 由闪烁发光变为常亮,蜂鸣器由间断发声变为常鸣,小灯泡熄灭,提醒司机立即停止倒车。
如果需要加大电路的检测距离,可以用一体化红外接收头代替电路中的红外接收管VT2 ,此时需要将LM567 的锁相环中心频率调整为38kHz 。
限速解码器原理
限速解码器原理限速解码器是一种常用的电子设备,用于解码和显示车辆当前的行驶速度。
它被广泛应用于汽车、摩托车等交通工具中,以提醒驾驶员遵守道路交通规则,确保行车安全。
本文将介绍限速解码器的原理及其工作方式。
一、限速解码器的原理限速解码器的原理基于车辆上安装的车速传感器。
车速传感器通过测量车轮转速或车轮转动的角度,来获取车辆的行驶速度。
传感器将获取的车速信号转化为电信号,并传送给限速解码器。
限速解码器根据接收到的车速信号,将其转换为可显示的数字或文字形式,以便驾驶员直观地了解当前的行驶速度。
同时,限速解码器还可以根据事先设定的限速值,与当前车速进行比较,从而提醒驾驶员是否超速。
二、限速解码器的工作方式限速解码器主要由车速传感器、信号处理电路和显示装置等组成。
车速传感器负责获取车速信息,信号处理电路负责对车速信号进行处理和转换,显示装置则用于显示车辆的行驶速度。
车速传感器通常采用磁电感式或霍尔效应式传感器。
磁电感式传感器通过感应车轮旋转产生的磁场变化,将其转化为电信号。
霍尔效应式传感器则利用霍尔元件感应车轮旋转时产生的磁场变化,同样将其转化为电信号。
这些传感器的输出信号与车辆的行驶速度成正比。
信号处理电路主要负责对传感器输出的模拟信号进行放大、滤波和数字化处理。
放大电路用于增强传感器输出信号的幅度,以提高解码器对信号的灵敏度。
滤波电路则用于滤除噪声干扰,确保解码器能够准确地识别车速信号。
数字化处理部分将模拟信号转化为数字信号,以便后续的数字处理和显示。
显示装置通常采用液晶显示屏或LED数码管。
液晶显示屏可以显示车辆的行驶速度,并可根据需要显示其他相关信息,如限速值、驾驶时间等。
LED数码管则以数字形式显示车速,通常分为个位数和十位数两部分,以便直观地显示行驶速度。
限速解码器还可以根据事先设定的限速值,与当前车速进行比较,并发出警示信号,提醒驾驶员是否超速。
当车速超过限速值时,解码器会发出声光警示,以引起驾驶员的注意,并促使其减速。
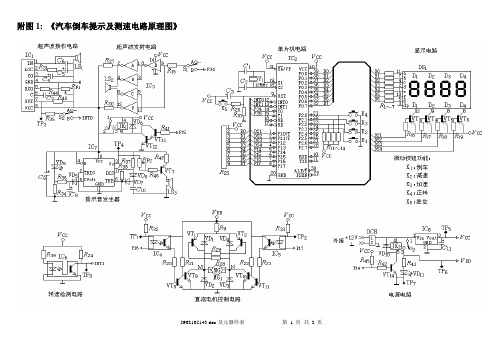
《汽车倒车提示及测速电路原理图》
K4
微动按钮
56
R25
排阻器
8×10kΩ
85
TP3
测试杆
114
VT13
三极管
9013
28
K5
微动按钮
57
R26
电阻器※
200Ω
86
TP4
测试杆
115
VT14
三极管
9013
29
MG1
直流电机(带转盘)
58
R27
电阻器※
1kΩ
87
TP5
测试杆
116
Y1
晶体振荡器
12MHz
注:在表格中名称旁边标有※符号的元器件,表示该元器件为贴片元器件。IC2.IC7带有集成座。
R47
电阻器
4.7Ω
107
VT6
三极管
9012
21
IC8
三端稳压带散热片
7805
50
R19
电阻器※
10kΩ
79
Rp1
电位器
50kΩ
108
VT7
三极管
9012
22
JK1
继电器
DC5V
51
R20
电阻器
10kΩ
80
Rp2
电位器
50kΩ
109
VT8
三极管
9013
23
JK2
继电器
DC12V
52
R21
电阻器
10kΩ
电阻器
200kΩ
104
VT3
三极管
9012
18
IC5
光耦合器
P521
47
R16
电阻器※
车辆检测器工作原理

车辆检测器工作原理车辆检测器是一种用于监测和控制交通流量的设备。
它可以实时检测路上车辆的数量、车辆的速度、车辆类型等信息,并将这些信息传输到控制中心,以便对交通流量进行管理和调控。
车辆检测器的工作原理基于一系列技术,下面将详细介绍它的工作原理。
车辆检测器主要通过以下几种技术来实现车辆的检测。
1. 磁性感应技术:磁性感应技术是车辆检测器中最常用的技术之一。
它通过埋设在地面下的线圈,利用车辆通行时的磁场变化来检测车辆的存在。
当车辆经过线圈时,由于车辆的金属体对磁场的敏感性,线圈中的感应电流发生了变化,从而可以检测到车辆的存在和通过的时间。
2. 微波雷达技术:微波雷达技术是一种利用微波信号来检测车辆的存在的技术。
车辆检测器通过发射微波信号,并接收被车辆反射回来的信号来确定车辆的位置和速度。
微波雷达技术具有高精度和不受天气影响的特点,因此在一些复杂环境下常被广泛应用。
3. 视频图像处理技术:视频图像处理技术是近年来发展起来的一种车辆检测技术。
它通过设置摄像头来获取道路上的图像,并利用图像处理算法来检测和跟踪车辆。
视频图像处理技术可以通过识别车辆的外形和运动轨迹来实现车辆的检测。
4. 压力感应技术:压力感应技术是一种通过检测车辆通行时对路面施加的压力来确定车辆存在的技术。
它通常通过在道路上安装感应器来实现。
当车辆通行时,感应器会检测到路面所受到的压力变化,并将其转化为电信号进行分析和处理,从而实现车辆的检测和统计。
这些技术在车辆检测器中常常结合使用,以提高车辆检测的准确性和可靠性。
通过收集车辆的数量、速度、类型等信息,交通管理者可以及时了解道路上的交通状况,从而采取相应的措施来调度交通流量,提升道路通行效率。
车辆检测器不仅广泛应用于城市道路的交通管理中,也被用于高速公路的车流量监测、停车场的车位管理等场景中。
它的工作原理的不断改进和创新,使得车辆检测器在智能交通系统中的应用越来越广泛且更加精准。
总而言之,车辆检测器通过磁性感应、微波雷达、视频图像处理和压力感应等技术,实现对道路上车辆的检测和统计。
汽车倒车雷达探测器的工作原理
汽车倒车雷达探测器的工作原理汽车倒车雷达探测器是一种常见的汽车安全辅助设备,它可以有效地帮助驾驶员在倒车时避免发生碰撞事故。
本文将详细介绍汽车倒车雷达探测器的工作原理。
一、工作原理概述汽车倒车雷达探测器通过使用超声波来实现对周围环境的探测。
它通常由多个传感器、控制模块和报警装置组成。
当车辆倒车时,传感器会发射超声波信号,并接收回波。
通过分析回波信号的时间和强度,控制模块可以准确计算车辆与障碍物之间的距离,并及时向驾驶员发出警报。
二、传感器汽车倒车雷达探测器的传感器通常安装在车辆的后保险杠上。
它们使用超声波传感器来发射和接收声波。
波束从传感器发送出去并与周围物体相交。
当声波遇到障碍物时会发生反射,返回传感器并被接收。
传感器测量声波离开和返回之间的时间差,并将这个时间差转换成距离。
三、控制模块控制模块负责接收传感器发送的信号和计算车辆与障碍物之间的距离。
当传感器接收到回波信号后,它们会将信号发送给控制模块。
控制模块使用声波的时间差来计算距离,并将结果显示在车辆内部的相关显示屏上。
四、报警装置报警装置是汽车倒车雷达探测器的重要组成部分。
当控制模块检测到距离障碍物过近时,它会向报警装置发送指令,以触发声音或光线等警报。
这样可以提醒驾驶员注意周围情况,避免发生碰撞事故。
五、工作原理详解汽车倒车雷达探测器的工作原理是基于声波的传播速度和回波时间的计算。
声波在空气中传播的速度大约为343米/秒,当声波遇到障碍物时会发生反射,返回传感器。
通过测量声波离开和返回之间的时间差,可以计算出障碍物与车辆之间的距离。
汽车倒车雷达探测器通常使用多个传感器进行环形布置,以实现360度的全方位探测。
每个传感器依次发射声波,并接收返回的回波。
控制模块通过比较不同传感器之间的时间差,可以计算出障碍物与车辆之间的具体位置和距离。
当控制模块计算出距离后,它会将结果显示在与控制模块连接的显示屏上。
驾驶员可以根据显示屏上的信息来判断障碍物的距离,从而采取相应的措施。
汽车倒车测距仪原理及电路分析

汽车倒车测距仪原理及电路分析汽车倒车测距仪能测量并显示车辆后部的障碍物离车辆的距离,同时可根据报警“嘟嘟”声的间隙来判断距离的远近。
主要技术指标:最大探测距离5m;测距相对误差〈士5%;工作环境:-10~55C。
雨、雪、雾及黑夜均不受影响。
汽车倒车测距仪电路图a为汽车倒车测距仪电路原理图。
IC1、IC2、IC3组成单片机的最小系统。
IC3为CPU芯片,IC1为接口电路,IC2为EPROM,内存汽车倒车测距工作程序。
仪器有3位LED数码管显示距离,小数点固定在第一位数字后.显示单位为米。
IC3的P1 口输出7段显示信号,低电平有效。
IC3第10~12脚为数显控制端,低电平有效。
数显系统采用扫描显示。
IC3第14脚为发射电路控制端,卨电平有效。
汽车倒车测距仪电路图b为40kHz超声波发射电路,IC4为2输人端4与非门,其中两个门组成多谐振荡器.调冇RP1可调节其振荡频率。
IC3第13脚为接收信号输人端,低电平有效。
汽车倒车测距仪电路图c为音频报警电路。
汽车倒车测距仪电路图d为反射信号接收电路,第二级放大器反馈回路采用LC并联谐振,以提高整机抗干扰性能.U采用收录机陷波线圈,调谐在40kHZ频率上。
放大后的反射信号,经VD2、C12整流滤波后输入IC6第4只运放进行电压比较.调节R17,即能调节整机接收距离。
当信号有效时,VT5管输出一个低电平脉冲。
系统软件根据发射信号和接收信号之间的时间差计算并转换成距离信号予以显示报警。
IC3第15脚为报警信号控制端,髙电平有效。
图3-10(c)为音频报警电路,IC4另两个门组成音频振荡器,振荡频率约800HZ,由C3耦合至IC5 (LM386)音频放大后驱动扬声器发出“嘟嘟”间隙报警声。
当探测到车后有障碍物时,即IC3第13脚有低电平信号输入时,系统软件根据障碍物距离远近输出不同频率的控制方波,距离远方波频率低,嘟声间隙时间长;距离近,方波频率髙,嘟声间隙时间短。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车测速及倒车提示产品介绍及电路原理
一、微动按钮功能
K5,复位键:按一下,电路复位,电路处于待机状态。
K4,正转键:按一下,电机MG1正转。
K3,加速键:正转时,按一下,电机MG1加速。
K2,减速键:正转时,按一下,电机MG1减速。
K1,倒车键:按一下,电机MG1反转。
二、产品功能介绍
1.电路正确连接后,接通电源,按一下微动按钮K5,数码显示管DS1显示0000。
2.按一下微动按钮K4,电机MG1转动并带动转盘(遮断器)转动,数码显示管DS1显示数字,再按一下K4,电机MG1停转,电路复位。
3.在按一下微动按钮K4后,按一下微动按钮K3,电机MG1转动加快并带动转盘(遮断器)转动,数码显示管DS1显示数字,此时显示的数字增大。
可按微动按钮K3三次(三档),第四次按动K3时,电机MG1停转,电路复位。
4.在按一下微动按钮K4后,按一下微动按钮K2,电机MG1转速减慢并带动转盘(遮断器)转动减慢,数码显示管DS1显示数字减少。
再按一下微动按钮K2,电机MG1停转,电路复位。
5.按一下微动按钮K1,电机MG1倒转并带动转盘(遮断器)转动,此时为汽车倒车。
用障碍物放在离开超声接收器LS1和超声发生器LS2一定距离的位置上,数码显示管DS1显示数字,此时显示的数字为障碍物与LS1和LS2的距离(相当于汽车与障碍物的距离,单位为厘米),如果障碍物距离变动,数码显示管DS1显示数字也随之变化。
当距离等于20厘米时,电机MG1自动停转。
或在大于20厘米时再按一下微动按钮K1,电机MG1停转,电路复位。
三、电路原理
该产品是由下面几部分电路组成:超声波发射电路、超声波接收电路、提示音发生器、直流电机控制电路、转速检测电路、单片机电路、显示电路和电源电路。
汽车测速及倒车提示功能及电路原理第 3 页共 3 页。