传感器与检测技术(完整)ppt课件
合集下载
传感器与检测技术ppt课件
22
重复性
图1-4所示为校正曲线的重复特性。
正行程的最大重复性偏差为△Rmax1, 反行程的最大重复 性偏差为△Rmax2,重复性误差取这两个最大偏差中之较 大者为△Rmax,再以满量程输出的百分数表示,即
rR
Rmax yFS
100%
(1-15)
式中 △Rmax----输出最大不重复误差。
精选课件ppt
现代人们的日常生活中,也愈来愈离不开检测技术。例 如现代化起居室中的温度、湿度、亮度、空气新鲜度、防火、 防盗和防尘等的测试控制,以及由有视觉、听觉、嗅觉、触 觉和味觉等感觉器官,并有思维能力机器人来参与各种家庭 事务管理和劳动等,都需要各种检测技术。
精选课件ppt
34
自动检测系统的基本组成
自动检测系统是自动测量、自动资料、自动保护、自动 诊断、自动信号处理等诸系统的总称,基本组成如图1-7。
图1-10 微差法测量稳压电源输出电压的微小变化
精选课件ppt
44
误差处理 主要内容
• 一、误差与精确处理 • 二、测量数据的统计处理 • 三、间接测量中误差的传递 • 四、有效数字及其计算法则
精选课件ppt
45
误差与精确处理
主要内容
(1)绝对误差与相对误差 (2)系统误差、偶然误差和疏失误差 (3)基本误差和附加误差 (4)常见的系统误差及降低其对测量结果影响的方法
(1-17)
由于种种原因,会引起灵敏度变化,产生灵敏度误差。灵 敏度误差用相对误差来表示
k10% 0 sk
(1-18)
精选课件ppt
25
分辨率
分辨率是指传感器能检测到的最小的输入增量。 分辨率可用绝对值表示,也可以用满量程的百分比表 示。
传感器与检测技术第一章(共41张PPT)
1.2 检测系统的组成
信号调理模块实物图
单通道信号调理电路
1.2 检测系统的组成
3. 数据采集 基于ARM9核的嵌入式控制器
转换速度 单位次/秒; 检测是指在生产、科研、试验及服务等各个领域,为及时获得被测、被控对象的有关信息而实时或非实时地对一些参量进行定性检查和定量测
量信。噪比高,抗干扰性数能要据好。 采集是对信号调理后的连续模拟信号离散 化并转换成与模拟信号电压幅度相对应的数值信息, 状态量 颜色、透明度、磨损量、裂纹、缺陷、泄漏、表面质量等。
检测仪表和检测系统的输出信号通常有4~20 mA的电流模拟信号和脉宽调制PWM信号及串行数字通信信号等多种形式,需根据系统的具体要
求确定。
基于ARM9核的嵌入式控制器
1 传感器与检测技术的地位与作用
检测是指在生产、科研、试验及服务等各个领域,为及时获得被测、被控对象的有关信息而实时或非实时地对一些参量进行定性检查和定量测
应用领域主要有: ➢石化行业的自动 化控制。 如右图,有液位、 温度、压力等检测。
1.1 传感器与检测技术的地位与作用
➢城市生活污水处理
主要有流量 检测、液位检 测和成分量检 测。
1.1 传感器与检测技术的地位与作用
➢新型武器和装备的研制与测试
定位与导航,图为中国研制的DF-21和雷达。
1.1 传感器与检测技术的地位与作用
7.输入设备 输入设备用于输入设置参数,下达有关命
令等。最常用的输入设备是各种键盘、拨码盘、 条码阅读器等。通过网络或各种通信总线利用 其他计算机或数字化智能终端,实现远程信息 和数据输入的方式将会得到更多的应用。
1.2 检测系统的组成
键盘
触摸屏
1.2 检测系统的组成
传感器与检测技术课件ppt课件

传感器与检测技术
第一篇 基础知识引论
1 绪论
1.1 检测仪表控制系统 1.2 基本概念 1.3 检测仪表技术发展趋势
检测技术
检测≠测量 检测技术是实验科学的一部分,主要研究各
种物理量的测量原理和测量信号分析处理方法。
智能楼宇控制
图示为某公司楼宇自动化 系统。该系统分为:安全 监测、照明控制、空调控 制、水/废水管理等。
滞环效应分析
同一输入,对应多个输出值,出现误差。
1.2.6 滞环、死区和回差
死区: – 死区效应,例如传动机构 的摩擦和间隙。 – 实际上升曲线和实际 下降曲线不重合。 – 仪表输入小到一定范围后不 足以引起输出的任何变化。
死区效应分析
1.2.6 滞环、死区和回差
综合效应: – 既有储能效应,也具有 死区效应。 – 各种情况下,实际上升曲 线和实际下降曲线间的差 值称为回差或变差。
误差函数的有关符号:
– 1)y f x
:误差x发生的概率密度
– 2)p x f x dx :误差为x的概率,称为概率元
– 3)p a x b b f x dx :误差在a与b之间的概率 a
– 4)p x f x dx 1 : 检测值存在或检测误差存在的概率为1
(a) 线性传感器
(b) 非线性传感器
作图法求灵敏度过程
y
Δy
切点
传感器 特性曲线
x1
0
K y
Δx
x
xmax x
两者关系
灵敏度高的仪表一定分辨率高(充分条件) 分辨率高的仪表不一定灵敏度高(非必要条件)
原因:分辨率高的仪表,如量程也很小,则灵 敏度也不高。
灵敏度具有可传递性,首尾串联的多仪表系统 总灵敏度是各仪表灵敏度的乘积。
第一篇 基础知识引论
1 绪论
1.1 检测仪表控制系统 1.2 基本概念 1.3 检测仪表技术发展趋势
检测技术
检测≠测量 检测技术是实验科学的一部分,主要研究各
种物理量的测量原理和测量信号分析处理方法。
智能楼宇控制
图示为某公司楼宇自动化 系统。该系统分为:安全 监测、照明控制、空调控 制、水/废水管理等。
滞环效应分析
同一输入,对应多个输出值,出现误差。
1.2.6 滞环、死区和回差
死区: – 死区效应,例如传动机构 的摩擦和间隙。 – 实际上升曲线和实际 下降曲线不重合。 – 仪表输入小到一定范围后不 足以引起输出的任何变化。
死区效应分析
1.2.6 滞环、死区和回差
综合效应: – 既有储能效应,也具有 死区效应。 – 各种情况下,实际上升曲 线和实际下降曲线间的差 值称为回差或变差。
误差函数的有关符号:
– 1)y f x
:误差x发生的概率密度
– 2)p x f x dx :误差为x的概率,称为概率元
– 3)p a x b b f x dx :误差在a与b之间的概率 a
– 4)p x f x dx 1 : 检测值存在或检测误差存在的概率为1
(a) 线性传感器
(b) 非线性传感器
作图法求灵敏度过程
y
Δy
切点
传感器 特性曲线
x1
0
K y
Δx
x
xmax x
两者关系
灵敏度高的仪表一定分辨率高(充分条件) 分辨率高的仪表不一定灵敏度高(非必要条件)
原因:分辨率高的仪表,如量程也很小,则灵 敏度也不高。
灵敏度具有可传递性,首尾串联的多仪表系统 总灵敏度是各仪表灵敏度的乘积。
传感器与检测技术ppt课件第一章
2024/2/29
16
1.2检测技术理论基础
1.2.2 测量方法
1) 直接测量、间接测量和组合测量 (又称联立 测量)。经过求解联立方程组,才能得到被测物理量的最后
结果,则称这样的测量为组合测量。
2) 偏差式测量、零位式测量与微差式测量
3) 等精度测量与非等精度测量
4) 静态测量与动态测量
2024/2/29
2024/2/29
23
2024/2/29
3
1.1.3 传感器基本特性
当传感器的输入信号是常量,不随时间变化时,其 输入输出关系特性称为静态特性。
传感器的基本特性是指系统的输入与输出关系特性 ,即传感器系统的输出信号y(t)和输入信号(被测 量)x(t)之间的关系,传感器系统示意图如下图所 示。
2024/2/29
4
1.1.3 传感器基本特性
2.传感器的分类
(1)按照其工作原理,传感器可分为电参数式(如电阻式、 电感式和电容式)传感器、压电式传感器、光电式传感器及 热电式传感器等。
(2)按照其被测量对象,传感器可分为力、位移、速度、 加速度传感器等。常见的被测物理量有机械量、声、磁、温 度和光等。
(3)按照其结构,传感器可分为结构型、物性型和复合型 传感器。物性型传感器是依靠敏感元件材料本身物理性质的 变化来实现信号变换,如:水银温度计。结构型传感器是依 靠传感器结构参数的变化实现信号变换,如:电容式传感器。
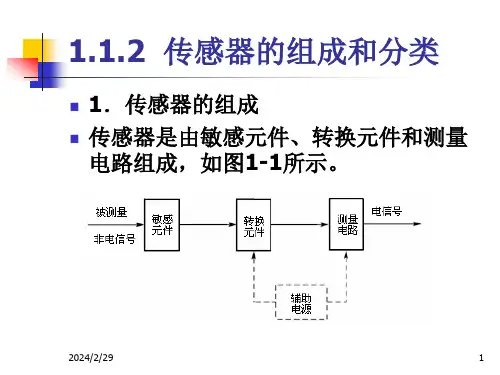
敏感元件输出的物理量转换成适于传输或测量电信号 的元件。
测量电路(measuring circuit): 将转换
元件输出的电信号进行进一步转换和处理的部分,如 放大、滤波、线性化、补偿等,以获得更好的品质特 性,便于后续电路实现显示、记录、处理及控制等功 能。
传感器与检测技术-ppt
2024/9/29
22
霍尔转速传感器在汽车防抱死装置(ABS) 中旳应用
带有微
型磁铁
霍尔
旳霍尔
传感器
钢质
若汽车在刹车时车轮被抱死,将产生 危险。用霍尔转速传感器来检测车轮旳转 动状态有利于控制刹车力旳大小。
2024/9/29
23
ABS旳工作原理
1—车速齿轮传感器 2—压力调整器 3—控制器
2024/9/29
24
霍尔转速表
在被测转速旳转轴上安装一种齿盘,也可 选用机械系统中旳一种齿轮,将线性型霍尔器 件及磁路系统接近齿盘。齿盘旳转动使磁路旳 磁阻随气隙旳变化而周期性地变化,霍尔器件 输出旳微小脉冲信号经隔直、放大、整形后能 够拟定被测物旳转速。
线性霍尔
NS
磁铁
2024/9/29
25
霍尔式接近开关
当磁铁旳有效磁 极接近、并到达动作 距离时,霍尔式接近 开关动作。霍尔接近 开关一般还配一块钕 铁硼磁铁。
SL3501T
N
mA
DC
DC
VCC 12V
10mA
1
3
V
2
+
_
·
2024/9/29
17
8.2.2 线性集成霍尔传感器
2.线性集成霍尔传感器旳主要技术特征
输出电压UOUT(V)
2.5
2.0
R=0
1.5
R=15Ω
1.0
R=100Ω
0.5
0 0.04 0.08 0.12 0.16 0.20 0.24 0.28 0.32 磁感应强度B(T)
14
8.2.1 开关型集成霍尔传感器
3. 开关型集成霍尔传感器旳工作特征
传感器与检测技术完整ppt课件
xmin 100% YFS
.
6.稳定性。稳定性有短期稳定性和长期稳定性之分。对于传感器常用长期 稳定性描述其稳定性。所谓传感器的稳定性是指在室温条件下,经过相当长 的时间间隔,传感器的输出与起始标定时的输出之间的差异。因此,通常又 用其不稳定度来表征传感器输出的稳定程度。
7.漂移。传感器的漂移是指在输入量不变的情况下,传感器输出量随着时 间变化,此现象称为漂移。产生漂移的原因有两个方面:一是传感器自身结 构参数;二是周围环境(如温度、湿度等)。
.
1.3.1测量误差及其分类
误差的定义
测量误差(error of measurement)是指测得值与被
测量真值之差,可用下式表示: 测量误差=测得值-真值
若定义中的测得值是用测量方式获得的被测量的测
量结果,则得到测量误差的定义为:测量误差=测量结果-真
值
若定义中的测得值是指计量仪器的示值,则得到计
1.1.3传感器的分类 1.按输入量(被测量)分类 2.按工作原理(机理)分类 3、按能量的关系分类 4.按输出信号的形式分类
.
1.2 传感器的特性
静态特性和动态特性
输入量X和输输出Y的关系通常可用多项式表示
静态特性可以用一组性能指标来描述,如线性度、灵敏度、精确度(精 度)、重复性、迟滞、漂移、阈值和分辨率、稳定性、量程等。
2替代法其实质是在测量装置上测量被测量后不改变测量条件立即用相应标准量代替被测量放到测量装置上再次进行测量从而得到此标准量测量结果与已知标准量的差值即系统误差取其负值即可作为被测量测量结果的修正先将被测量x放于天平一侧标准砝码p放于另一侧调至天平平衡则有xpl此时移去被测量x用标准砝码q代替使天平重新平衡则有qpl2l1所以有xq
.
6.稳定性。稳定性有短期稳定性和长期稳定性之分。对于传感器常用长期 稳定性描述其稳定性。所谓传感器的稳定性是指在室温条件下,经过相当长 的时间间隔,传感器的输出与起始标定时的输出之间的差异。因此,通常又 用其不稳定度来表征传感器输出的稳定程度。
7.漂移。传感器的漂移是指在输入量不变的情况下,传感器输出量随着时 间变化,此现象称为漂移。产生漂移的原因有两个方面:一是传感器自身结 构参数;二是周围环境(如温度、湿度等)。
.
1.3.1测量误差及其分类
误差的定义
测量误差(error of measurement)是指测得值与被
测量真值之差,可用下式表示: 测量误差=测得值-真值
若定义中的测得值是用测量方式获得的被测量的测
量结果,则得到测量误差的定义为:测量误差=测量结果-真
值
若定义中的测得值是指计量仪器的示值,则得到计
1.1.3传感器的分类 1.按输入量(被测量)分类 2.按工作原理(机理)分类 3、按能量的关系分类 4.按输出信号的形式分类
.
1.2 传感器的特性
静态特性和动态特性
输入量X和输输出Y的关系通常可用多项式表示
静态特性可以用一组性能指标来描述,如线性度、灵敏度、精确度(精 度)、重复性、迟滞、漂移、阈值和分辨率、稳定性、量程等。
2替代法其实质是在测量装置上测量被测量后不改变测量条件立即用相应标准量代替被测量放到测量装置上再次进行测量从而得到此标准量测量结果与已知标准量的差值即系统误差取其负值即可作为被测量测量结果的修正先将被测量x放于天平一侧标准砝码p放于另一侧调至天平平衡则有xpl此时移去被测量x用标准砝码q代替使天平重新平衡则有qpl2l1所以有xq
传感器技术 传感器与检测技术 PPT课件
学习本课程之前,要求先修《大学物理》、《电路理论》、《模拟电 子技术》、《数字电子技术》、《电气测量技术》,本课程也是《过 程控制系统及仪表》的先修课程。
本课程的性质及适应对象
本课程为电子信息工程专业选修课程。
本科教学计划安排
章次
内容
1 绪论
2 电阻式传感器原理与应用
3 变阻抗式传感器原理与应用
4 光电式传感器原理与应用
基础知识
定义、分类 发展趋势 选用原则 一般特性
检测电路 现代检测系统
传感器原理 检测技术
参考网站
[1]传感器课程 [2]仪表技术与传感器 [3]传感器世界 [4]中国传感器 [5]传感器技术 [6]21IC中国电子网 [7]传感技术学报网
[8]传感器资讯网
参考文献
1.王化祥,张淑英.传感器原理及应用(第3版)[M].天津:天津 大学出版社, 2007
2.杨万海.多传感器数据融合及其应用[M].西安:西安电子科技 大学出版社,2004
思考题与习题
第7章 流量检测
7.1 流量的基本概念 7.2 差压式流量计 7.3 电磁流量计 7.4 涡轮流量计 7.5 涡街流量计 7.6 超声流量计 7.7 质量流量计
思考题与习题
第8章 成分检测
8.1 概述 8.2 热导式气体分析仪 8.3 磁性氧量分析仪 8.4 氧化锆氧量分析仪 8.5 红外气体分析仪 8.6感器概述 1.3 测量误差与数据处理 1.4 传感器的一般特性 1.5 传感器的标定和校准
思考题与习题
第2章电阻式传感器原理与应用
2.1 应变式传感器 2.2 电阻式传感器
思考题与习题
第3章 变阻抗式传感器原理与应用
本课程的性质及适应对象
本课程为电子信息工程专业选修课程。
本科教学计划安排
章次
内容
1 绪论
2 电阻式传感器原理与应用
3 变阻抗式传感器原理与应用
4 光电式传感器原理与应用
基础知识
定义、分类 发展趋势 选用原则 一般特性
检测电路 现代检测系统
传感器原理 检测技术
参考网站
[1]传感器课程 [2]仪表技术与传感器 [3]传感器世界 [4]中国传感器 [5]传感器技术 [6]21IC中国电子网 [7]传感技术学报网
[8]传感器资讯网
参考文献
1.王化祥,张淑英.传感器原理及应用(第3版)[M].天津:天津 大学出版社, 2007
2.杨万海.多传感器数据融合及其应用[M].西安:西安电子科技 大学出版社,2004
思考题与习题
第7章 流量检测
7.1 流量的基本概念 7.2 差压式流量计 7.3 电磁流量计 7.4 涡轮流量计 7.5 涡街流量计 7.6 超声流量计 7.7 质量流量计
思考题与习题
第8章 成分检测
8.1 概述 8.2 热导式气体分析仪 8.3 磁性氧量分析仪 8.4 氧化锆氧量分析仪 8.5 红外气体分析仪 8.6感器概述 1.3 测量误差与数据处理 1.4 传感器的一般特性 1.5 传感器的标定和校准
思考题与习题
第2章电阻式传感器原理与应用
2.1 应变式传感器 2.2 电阻式传感器
思考题与习题
第3章 变阻抗式传感器原理与应用
传感器与检测技术 PPT课件
• 检测技术随着科学技术的发展而发展。现代工业经历了从手工作坊到机械 化、 自动化的历程,并从自动化向自治化、智能化的目标演化。随着生产设备机 械化、自动化水平的提高,控制对象日益复杂,由于系统中表征设备工作状 态的 状态参数多、参数变化快、子系统不确定性大等特点,从而对检测技术 的要求不 断提高,促进了检测技术水平的不断提高。
• 在测量装置和某些分类机械中,检测是装置和设 备的核心。例如自动分拣机要实现将工件按重量 分别放在不同位置的功能,就必须具有重量检测 单元(见下图)。
2.设备运行状态检测与故障诊断
• 为了保证机电设备安全可靠地运行,经常要求对 主要参数进行监测,如对电源电压、电机功耗或 负载电流、润滑油温度的监测等,其目的是防止 过载造成损 坏。这是一种保护性检测。但是随着 预防性维修的发展,对一些大型关键设备 要求进 行以故障诊断为目的的状态检测,例如,利用检 测振动信号,可监视动力 机械轴承或齿轮的故障, 并通过频率分析确定故障的部位,区分出轴承内 环、外 环或滚珠的故障。数控加工机床可利用切 削力信号、振动信号或声发射信号监 测刀具的工 作状态,当刀具破损或发生严重磨损时,及时发 出报警。
第七章智能传感器(4学时) • 概述 • 智能传感器的系统构成 • 智能传感器的集成技术 • 智能传感器实现的方法 • 智能仪器实例 第八章 传感器信号处理(2学时) • 测量放大器 • 信号的调制与解调 • 滤波器 • 传感器信号的非线性校正
第九章自动检测系统 (4学时) • 自动检测系统的组成 • 模拟量数据采集系统 • 数据采集系统输入接口器件 • 主要特性指标及测定方法 • 虚拟仪器
3.制造质量检测与控制
• 在机械制造过程中,为了保证加工零件的质量而 进行的检测,例如材质检 测、缺陷检测、尺寸及 表面质量检测。基于质量控制的检测又分为在线 检测与离 线检测。离线检测是在加工或装配完成 后对零件或产品进行检测,确定加工零 件是否合 格,剔除不合格零件,或者通过绘制控制图发现 加工过程的异常趋势。 在线检测是在加工或装配 过程中进行检测,例如,外圆磨削自动检测仪可 在磨削 过程中利用气动量仪或电感测头自动检测 工件尺寸,输出检测信息,以对机床进 行补充调 节或供显示报警。
• 在测量装置和某些分类机械中,检测是装置和设 备的核心。例如自动分拣机要实现将工件按重量 分别放在不同位置的功能,就必须具有重量检测 单元(见下图)。
2.设备运行状态检测与故障诊断
• 为了保证机电设备安全可靠地运行,经常要求对 主要参数进行监测,如对电源电压、电机功耗或 负载电流、润滑油温度的监测等,其目的是防止 过载造成损 坏。这是一种保护性检测。但是随着 预防性维修的发展,对一些大型关键设备 要求进 行以故障诊断为目的的状态检测,例如,利用检 测振动信号,可监视动力 机械轴承或齿轮的故障, 并通过频率分析确定故障的部位,区分出轴承内 环、外 环或滚珠的故障。数控加工机床可利用切 削力信号、振动信号或声发射信号监 测刀具的工 作状态,当刀具破损或发生严重磨损时,及时发 出报警。
第七章智能传感器(4学时) • 概述 • 智能传感器的系统构成 • 智能传感器的集成技术 • 智能传感器实现的方法 • 智能仪器实例 第八章 传感器信号处理(2学时) • 测量放大器 • 信号的调制与解调 • 滤波器 • 传感器信号的非线性校正
第九章自动检测系统 (4学时) • 自动检测系统的组成 • 模拟量数据采集系统 • 数据采集系统输入接口器件 • 主要特性指标及测定方法 • 虚拟仪器
3.制造质量检测与控制
• 在机械制造过程中,为了保证加工零件的质量而 进行的检测,例如材质检 测、缺陷检测、尺寸及 表面质量检测。基于质量控制的检测又分为在线 检测与离 线检测。离线检测是在加工或装配完成 后对零件或产品进行检测,确定加工零 件是否合 格,剔除不合格零件,或者通过绘制控制图发现 加工过程的异常趋势。 在线检测是在加工或装配 过程中进行检测,例如,外圆磨削自动检测仪可 在磨削 过程中利用气动量仪或电感测头自动检测 工件尺寸,输出检测信息,以对机床进 行补充调 节或供显示报警。
传感器与检测技术PPT
作 用:现代工程装备中, 检测环节的成本约占 50~70%
12
一、检测技术的作用和地位
检测技术在汽车中的应用日新月异
汽车传感器:汽车电子控制系统的信息源,关键部件,核心技术内容 普通轿车:约安装几十到近百只传感器, 豪华轿车:传感器数量可多达二百余只。
发动机:向发动机的电子控制单元(ECU)提供发动机的工作状况信息, 对发动机工作状况进行精确控制 温度、压力、位置、转速、流量、气体浓度和爆震传感器等
1、直接测量与间接测量 (3)研制海洋探测用传感器
五、现代检测技术发展趋势
通常把这个误差称为单次测量的极限误差δlimx,即
• 直接测量:直接将被测量与标准量进行比较 5—油杯 6—被标传感器
从加热炉出来的钢坯最后到卷取机之前的整个轧制线上,如加热炉出口、粗轧机的入口和出口、精轧机的入口和出口以及在卷取机之
8
一、检测的地位和作用
工业生产倍增器
检测技术是带动国民经济增长的一个 关键领域 在美国:检测技术占4%,拉动经济增长66%
9
一、检测的地位和作用
检测技术在工业生产领域的应用
在线检测:零件尺寸、产品缺陷、装配定位….
10
11
一、检测技术的作用和地位
检测技术在工业生产领域的应用
离线检测:零件参数、 尺寸与形位公差、 品质参数
神州飞船:
185台(套)仪器装置 检测参数---加速度、温度、压力、 振动、流量、应变、 声学、
21
一、检测技术的作用和地位
直接测量 (绝对测量、相对测量)
利用测量仪表的指针相对于刻度的偏差位移直接表示测量的数值
“物化法官” 制成力敏、热敏、光敏、磁敏气敏等敏感元件。
标定仪器设备精度等级的确定
12
一、检测技术的作用和地位
检测技术在汽车中的应用日新月异
汽车传感器:汽车电子控制系统的信息源,关键部件,核心技术内容 普通轿车:约安装几十到近百只传感器, 豪华轿车:传感器数量可多达二百余只。
发动机:向发动机的电子控制单元(ECU)提供发动机的工作状况信息, 对发动机工作状况进行精确控制 温度、压力、位置、转速、流量、气体浓度和爆震传感器等
1、直接测量与间接测量 (3)研制海洋探测用传感器
五、现代检测技术发展趋势
通常把这个误差称为单次测量的极限误差δlimx,即
• 直接测量:直接将被测量与标准量进行比较 5—油杯 6—被标传感器
从加热炉出来的钢坯最后到卷取机之前的整个轧制线上,如加热炉出口、粗轧机的入口和出口、精轧机的入口和出口以及在卷取机之
8
一、检测的地位和作用
工业生产倍增器
检测技术是带动国民经济增长的一个 关键领域 在美国:检测技术占4%,拉动经济增长66%
9
一、检测的地位和作用
检测技术在工业生产领域的应用
在线检测:零件尺寸、产品缺陷、装配定位….
10
11
一、检测技术的作用和地位
检测技术在工业生产领域的应用
离线检测:零件参数、 尺寸与形位公差、 品质参数
神州飞船:
185台(套)仪器装置 检测参数---加速度、温度、压力、 振动、流量、应变、 声学、
21
一、检测技术的作用和地位
直接测量 (绝对测量、相对测量)
利用测量仪表的指针相对于刻度的偏差位移直接表示测量的数值
“物化法官” 制成力敏、热敏、光敏、磁敏气敏等敏感元件。
标定仪器设备精度等级的确定
传感器与检测技术 ppt课件第一章
1.传感器的组成 . 传感器是由敏感元件, 传感器是由敏感元件,转换元件和测量 电路组成,如图1-1所示. 所示. 电路组成,如图 所示
2010-7-18
2
1.1.2 传感器的组成与分类
敏感元件(sensing element): 直接感受 敏感元件 :
被测量的变化, 被测量的变化,并输出与被测量成确定关系的某一物 理量的元件,它是传感器的核心. 理量的元件,它是传感器的核心.
2010-7-18
5
1.1.3 传感器基本特性
传感器的静态特性: 传感器的静态特性: 1. 测量范围:传感器所能测量到的最小输入量 与最大输入量 之间 测量范围:
的范围称为传感器的测量范围. 的范围称为传感器的测量范围.
2. 量程:传感器测量范围的上限值 与下限值 的代数差 - 称为量程. 量程: 称为量程. 3. 精度:传感器的精度是指测量结果的可靠程度,是测量中各类误差 精度:传感器的精度是指测量结果的可靠程度,
1.1.4 传感器的命名,代号和图形符号 传感器的命名,
1.传感器的命名 传感器的命名
传感器的全称应由"主题词+四级修饰语"组成,即 主题词 —— 传感器 一级修饰语 —— 被测量,包括修饰被测量的定语. 二级修饰语 —— 转换原理,一般可后缀以"式"字 . 三级修饰语 —— 特征描述,指必须强调的传感器结构,性能,材
2010-7-18 4
1.1.3 传感器基本特性
当传感器的输入信号是常量,不随时间变化时, 当传感器的输入信号是常量,不随时间变化时,其 输入输出关系特性称为静态特性. 输入输出关系特性称为静态特性. 传感器的基本特性是指系统的输入与输出关系特性 即传感器系统的输出信号y(t)和输入信号 和输入信号( ,即传感器系统的输出信号y(t)和输入信号(被测 之间的关系, 量)x(t)之间的关系,传感器系统示意图如下图所 之间的关系 示.
2010-7-18
2
1.1.2 传感器的组成与分类
敏感元件(sensing element): 直接感受 敏感元件 :
被测量的变化, 被测量的变化,并输出与被测量成确定关系的某一物 理量的元件,它是传感器的核心. 理量的元件,它是传感器的核心.
2010-7-18
5
1.1.3 传感器基本特性
传感器的静态特性: 传感器的静态特性: 1. 测量范围:传感器所能测量到的最小输入量 与最大输入量 之间 测量范围:
的范围称为传感器的测量范围. 的范围称为传感器的测量范围.
2. 量程:传感器测量范围的上限值 与下限值 的代数差 - 称为量程. 量程: 称为量程. 3. 精度:传感器的精度是指测量结果的可靠程度,是测量中各类误差 精度:传感器的精度是指测量结果的可靠程度,
1.1.4 传感器的命名,代号和图形符号 传感器的命名,
1.传感器的命名 传感器的命名
传感器的全称应由"主题词+四级修饰语"组成,即 主题词 —— 传感器 一级修饰语 —— 被测量,包括修饰被测量的定语. 二级修饰语 —— 转换原理,一般可后缀以"式"字 . 三级修饰语 —— 特征描述,指必须强调的传感器结构,性能,材
2010-7-18 4
1.1.3 传感器基本特性
当传感器的输入信号是常量,不随时间变化时, 当传感器的输入信号是常量,不随时间变化时,其 输入输出关系特性称为静态特性. 输入输出关系特性称为静态特性. 传感器的基本特性是指系统的输入与输出关系特性 即传感器系统的输出信号y(t)和输入信号 和输入信号( ,即传感器系统的输出信号y(t)和输入信号(被测 之间的关系, 量)x(t)之间的关系,传感器系统示意图如下图所 之间的关系 示.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2)UH=KHIB:采用恒流源供电, 可以使霍尔电势稳 定(减小由于输入电阻R随温度t变化而引起的激励 电流I变化所带来的影响。)
.
电子与信息工程学院控制科学与工程系
3)热敏电阻补偿
➢霍尔元件一般具有正温度系数,即输出随温度升高而下降, 若能使控制电流随温度升高而上升。
➢输入回路串热敏电阻(当温度上升时其阻值下降,使 控制电流上升。) ➢输出回路补偿负载上得到的霍尔电势随温度上升而下 降被热敏电阻阻值减小所补偿。 ➢在使用时,热敏电阻或电阻丝最好和霍尔元件封在一起或 靠近,使它们温度变化一致。
f=npN =n⇒ pn= tN /pt
线性霍尔
n 60 f 22
NS
磁铁
.
电子与信息工程学院控制科学与工程系
霍尔转速表原理
当齿对准霍尔元件时,磁力线集中穿 过霍尔元件,可产生较大的霍尔电动势, 放大、整形后输出高电平;反之,当齿轮 的空挡对准霍尔元件时,输出为低电平。
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
(2)不等位电势补偿
当霍尔元件B=0,I≠0,UH=U0≠0。 这时测得的空载霍尔电势称不等位电势。 产生这一现象的原因有:
① 霍尔电极安装位置不对称或不在同一等电位面上; ② 半导体材料不均匀造成了电阻率不均匀或是几何尺寸不 均匀;
两电极电不在同一等电位面上
同济大学电子与信息工程学院控制科学与工程系
传感器与检测技术
主讲教师:苏永清
.
1
电子与信息工程学院控制科学与工程系
物理现象观察
霍尔效应
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
Hale Waihona Puke 第8章 霍尔传感器霍尔传感器是基于霍尔效应的一种 传感器。1879年美国物理学家霍尔首 先在金属材料中发现了霍尔效应, 但 由于金属材料的霍尔效应太弱而没有 得到应用。随着半导体技术的发展, 开始用半导体材料制成霍尔元件, 由 于它的霍尔效应显著而得到应用和发 展。霍尔传感器广泛用于电磁测量、 压力、加速度、振动等方面的测量。
四、霍尔传感器的应用
霍尔电势是关于I、B、 三个变量的 函数,即 EH=KHIBcos 。利用这个关系可
以使其中两个量不变,将第三个量作为变 量,或者固定其中一个量,其余两个量都 作为变量。这使得霍尔传感器有许多用途 。
.
电子与信息工程学院控制科学与工程系
1、霍尔转速表
在被测转速的转轴上安装一个齿盘,也可选取机械系统中 的一个齿轮,将线性型霍尔器件及磁路系统靠近齿盘。齿盘的 转动使磁路的磁阻随气隙的改变而周期性地变化,霍尔器件输 出的微小脉冲信号经隔直、放大、整形后可以确定被测物的转 速。
霍尔转速传感器在汽车防抱死装置(ABS)
中的应用
带有微 型磁铁
霍尔
的霍尔 传感器
钢质
若汽车在刹车时车轮被抱死,将产生危 险。用霍尔转速传感器来检测车轮的转动状 态有助于控制刹车力的大小。
.
电子与信息工程学院控制科学与工程系
另一种转速测量安装方法
磁性转盘的输入轴与被测转轴相连, 当被测转轴转动时, 磁 性转盘随之转动, 固定在磁性转盘附近的霍尔传感器便可 在每一个小磁铁通过时产生一个相应的脉冲, 检测出单位 时间的脉冲数, 便可知被测转速。磁性转盘上小磁铁数目 的多少决定了传感器测量转速的分辨率。
f np 计数值N N npt n N
.
电子与信息工程学院控制科学与工程系
基本电路
RW调节控制电流的大小。 RL为负载电阻,可以是放大器的内阻或指示器内阻。 霍尔效应建立的时间极短(10-12~10-14S),I即可以是直
流,也可以是交流。 若被测物理量是I、B或者IB乘积的函数,通过测量霍尔电
势UH就可知道被测量的大小。
.
电子与信息工程学院控制科学与工程系
霍尔系数,材料确定后为常数
kH
RH d
灵敏度系数
对于导体,霍尔系数一般较小,故霍耳元件一般 用半导体制作,且愈小(薄),灵敏度愈高
.
电子与信息工程学院控制科学与工程系
霍尔元件基本结构
由霍尔片、引线和壳体组成, 如图所示。 霍尔片是一块矩形半导体单晶薄片,引出四个引线。1、 1′两根引线加激励电压或电流,称为激励电极;2、2′引线 为霍尔输出引线,称为霍尔电极。 霍尔元件壳体由非导磁金 属、陶瓷或环氧树脂封装而成。 在电路中霍尔元件可用两种 符号表示。
.
等电位面歪斜
电子与信息工程学院控制科学与工程系 不等位电势补偿的方法
理想情况下, R1=R2=R3=R4, U0=0
由于不等位电阻的存在,说明此四个电阻值不相等, 则 电桥不平衡。为使其达到平衡,可在阻值较大的桥臂 上并联电阻,或在两个桥臂上同时并联电阻。
.
电子与信息工程学院控制科学与工程系
二、元件特性及其补偿 (1)UH-I特性
U H n IB e k H d I Bk Id dH U I B c k H B
分析: 1.UH-I特性曲线是线性的; 2.kI-kH成正比∴ kI∝1/d,∴kI大
的元件,d小,不能通过较大电 流,UH∝I不一定高,
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
2、性能补偿 (1)温度补偿
霍尔元件是采用半导体材料制成的, 因此它们的 许多参数都具有较大的温度系数。当温度变化时, 霍尔元件的载流子浓度、迁移率、电阻率及霍尔 系数都将发生变化, 从而使霍尔元件产生温度误 差。
1)采用恒温措施
.
电子与信息工程学院控制科学与工程系
.
霍尔元件是一 种四端元件
电子与信息工程学院控制科学与工程系
定向运动的电子除受到洛仑兹力外,还受到霍尔电场的作用, 当fl=fE时,达到平衡,此时
B
b
fL v I
FLeVB
FE
eEH
eUH b
IevBneUebHvb dvUHbI vB
fE
E
nebd
d
H
IB IB UHnedRHdkHI B
RH
1 ne
(2)UH-B特性
kB
UH (B) UH (B0)
当控制电流恒定时,霍尔元件的
输出随B增加并不完全是线性关 系,B<0.5T时, UH-B才呈较好 线性。其中Hz-4型元件线性度高
。
当磁场为交变、电流是直流时, 由于交变磁场在导体内产生涡流 而输出附加霍尔电势,因此霍尔 元件只能在几千Hz频率的交变磁 场内工作。
.
电子与信息工程学院控制科学与工程系
3)热敏电阻补偿
➢霍尔元件一般具有正温度系数,即输出随温度升高而下降, 若能使控制电流随温度升高而上升。
➢输入回路串热敏电阻(当温度上升时其阻值下降,使 控制电流上升。) ➢输出回路补偿负载上得到的霍尔电势随温度上升而下 降被热敏电阻阻值减小所补偿。 ➢在使用时,热敏电阻或电阻丝最好和霍尔元件封在一起或 靠近,使它们温度变化一致。
f=npN =n⇒ pn= tN /pt
线性霍尔
n 60 f 22
NS
磁铁
.
电子与信息工程学院控制科学与工程系
霍尔转速表原理
当齿对准霍尔元件时,磁力线集中穿 过霍尔元件,可产生较大的霍尔电动势, 放大、整形后输出高电平;反之,当齿轮 的空挡对准霍尔元件时,输出为低电平。
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
(2)不等位电势补偿
当霍尔元件B=0,I≠0,UH=U0≠0。 这时测得的空载霍尔电势称不等位电势。 产生这一现象的原因有:
① 霍尔电极安装位置不对称或不在同一等电位面上; ② 半导体材料不均匀造成了电阻率不均匀或是几何尺寸不 均匀;
两电极电不在同一等电位面上
同济大学电子与信息工程学院控制科学与工程系
传感器与检测技术
主讲教师:苏永清
.
1
电子与信息工程学院控制科学与工程系
物理现象观察
霍尔效应
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
Hale Waihona Puke 第8章 霍尔传感器霍尔传感器是基于霍尔效应的一种 传感器。1879年美国物理学家霍尔首 先在金属材料中发现了霍尔效应, 但 由于金属材料的霍尔效应太弱而没有 得到应用。随着半导体技术的发展, 开始用半导体材料制成霍尔元件, 由 于它的霍尔效应显著而得到应用和发 展。霍尔传感器广泛用于电磁测量、 压力、加速度、振动等方面的测量。
四、霍尔传感器的应用
霍尔电势是关于I、B、 三个变量的 函数,即 EH=KHIBcos 。利用这个关系可
以使其中两个量不变,将第三个量作为变 量,或者固定其中一个量,其余两个量都 作为变量。这使得霍尔传感器有许多用途 。
.
电子与信息工程学院控制科学与工程系
1、霍尔转速表
在被测转速的转轴上安装一个齿盘,也可选取机械系统中 的一个齿轮,将线性型霍尔器件及磁路系统靠近齿盘。齿盘的 转动使磁路的磁阻随气隙的改变而周期性地变化,霍尔器件输 出的微小脉冲信号经隔直、放大、整形后可以确定被测物的转 速。
霍尔转速传感器在汽车防抱死装置(ABS)
中的应用
带有微 型磁铁
霍尔
的霍尔 传感器
钢质
若汽车在刹车时车轮被抱死,将产生危 险。用霍尔转速传感器来检测车轮的转动状 态有助于控制刹车力的大小。
.
电子与信息工程学院控制科学与工程系
另一种转速测量安装方法
磁性转盘的输入轴与被测转轴相连, 当被测转轴转动时, 磁 性转盘随之转动, 固定在磁性转盘附近的霍尔传感器便可 在每一个小磁铁通过时产生一个相应的脉冲, 检测出单位 时间的脉冲数, 便可知被测转速。磁性转盘上小磁铁数目 的多少决定了传感器测量转速的分辨率。
f np 计数值N N npt n N
.
电子与信息工程学院控制科学与工程系
基本电路
RW调节控制电流的大小。 RL为负载电阻,可以是放大器的内阻或指示器内阻。 霍尔效应建立的时间极短(10-12~10-14S),I即可以是直
流,也可以是交流。 若被测物理量是I、B或者IB乘积的函数,通过测量霍尔电
势UH就可知道被测量的大小。
.
电子与信息工程学院控制科学与工程系
霍尔系数,材料确定后为常数
kH
RH d
灵敏度系数
对于导体,霍尔系数一般较小,故霍耳元件一般 用半导体制作,且愈小(薄),灵敏度愈高
.
电子与信息工程学院控制科学与工程系
霍尔元件基本结构
由霍尔片、引线和壳体组成, 如图所示。 霍尔片是一块矩形半导体单晶薄片,引出四个引线。1、 1′两根引线加激励电压或电流,称为激励电极;2、2′引线 为霍尔输出引线,称为霍尔电极。 霍尔元件壳体由非导磁金 属、陶瓷或环氧树脂封装而成。 在电路中霍尔元件可用两种 符号表示。
.
等电位面歪斜
电子与信息工程学院控制科学与工程系 不等位电势补偿的方法
理想情况下, R1=R2=R3=R4, U0=0
由于不等位电阻的存在,说明此四个电阻值不相等, 则 电桥不平衡。为使其达到平衡,可在阻值较大的桥臂 上并联电阻,或在两个桥臂上同时并联电阻。
.
电子与信息工程学院控制科学与工程系
二、元件特性及其补偿 (1)UH-I特性
U H n IB e k H d I Bk Id dH U I B c k H B
分析: 1.UH-I特性曲线是线性的; 2.kI-kH成正比∴ kI∝1/d,∴kI大
的元件,d小,不能通过较大电 流,UH∝I不一定高,
.
电子与信息工程学院控制科学与工程系
.
电子与信息工程学院控制科学与工程系
2、性能补偿 (1)温度补偿
霍尔元件是采用半导体材料制成的, 因此它们的 许多参数都具有较大的温度系数。当温度变化时, 霍尔元件的载流子浓度、迁移率、电阻率及霍尔 系数都将发生变化, 从而使霍尔元件产生温度误 差。
1)采用恒温措施
.
电子与信息工程学院控制科学与工程系
.
霍尔元件是一 种四端元件
电子与信息工程学院控制科学与工程系
定向运动的电子除受到洛仑兹力外,还受到霍尔电场的作用, 当fl=fE时,达到平衡,此时
B
b
fL v I
FLeVB
FE
eEH
eUH b
IevBneUebHvb dvUHbI vB
fE
E
nebd
d
H
IB IB UHnedRHdkHI B
RH
1 ne
(2)UH-B特性
kB
UH (B) UH (B0)
当控制电流恒定时,霍尔元件的
输出随B增加并不完全是线性关 系,B<0.5T时, UH-B才呈较好 线性。其中Hz-4型元件线性度高
。
当磁场为交变、电流是直流时, 由于交变磁场在导体内产生涡流 而输出附加霍尔电势,因此霍尔 元件只能在几千Hz频率的交变磁 场内工作。