红外传感器避障流程图
红外寻迹避障电路总结讲解
光电传感器一、反射式光电传感器简介反射式光电传感器在机器人中有着广泛的应用。
可以用来检测地面明暗和颜色的变化,也可以探测有无接近的物体。
这种光电传感器的基本原理是,自带一个光源和一个光接收装置,光源发出的光经过待测物体的反射被光敏元件接收,再经过相关电路的处理得到所需要的信息。
相应的,光谱范围,灵敏度,抗干扰能力,输出特性等都是反射式光电传感器的重要参数。
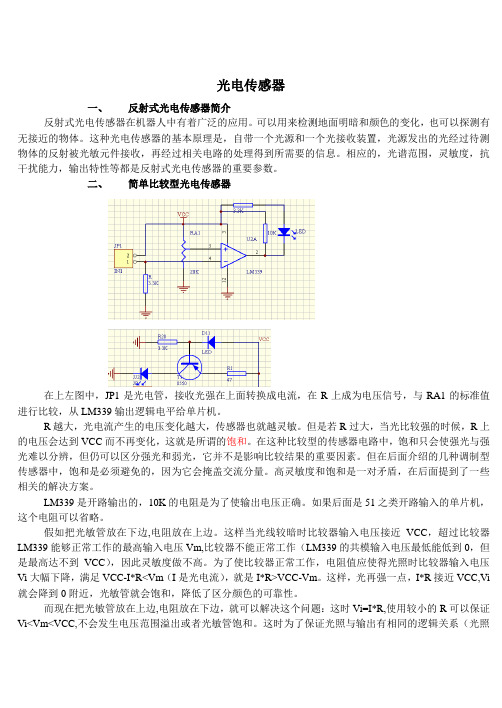
二、简单比较型光电传感器在上左图中,JP1是光电管,接收光强在上面转换成电流,在R上成为电压信号,与RA1的标准值进行比较,从LM339输出逻辑电平给单片机。
R越大,光电流产生的电压变化越大,传感器也就越灵敏。
但是若R过大,当光比较强的时候,R上的电压会达到VCC而不再变化,这就是所谓的饱和。
在这种比较型的传感器电路中,饱和只会使强光与强光难以分辨,但仍可以区分强光和弱光,它并不是影响比较结果的重要因素。
但在后面介绍的几种调制型传感器中,饱和是必须避免的,因为它会掩盖交流分量。
高灵敏度和饱和是一对矛盾,在后面提到了一些相关的解决方案。
LM339是开路输出的,10K的电阻是为了使输出电压正确。
如果后面是51之类开路输入的单片机,这个电阻可以省略。
假如把光敏管放在下边,电阻放在上边。
这样当光线较暗时比较器输入电压接近VCC,超过比较器LM339能够正常工作的最高输入电压Vm,比较器不能正常工作(LM339的共模输入电压最低能低到0,但是最高达不到VCC),因此灵敏度做不高。
为了使比较器正常工作,电阻值应使得光照时比较器输入电压Vi大幅下降,满足VCC-I*R<Vm(I是光电流),就是I*R>VCC-Vm。
这样,光再强一点,I*R接近VCC,Vi 就会降到0附近,光敏管就会饱和,降低了区分颜色的可靠性。
而现在把光敏管放在上边,电阻放在下边,就可以解决这个问题:这时Vi=I*R,使用较小的R可以保证Vi<Vm<VCC,不会发生电压范围溢出或者光敏管饱和。
最新智能小车红外避障实验PPT课件

亚博科技
智能小车配套视频教程
循迹和避障的比较
相同点:
1:原理图相同,均采用红外发送接收对管来完成。 2:硬件调节方式相同,都通过滑动电阻调节灵敏度。 3:均为有信号时输出低,指示灯亮起。 不同点:
1:探测方向不同,前者对地面探测,后者对行进方向正前方探测。 2:循迹需要靠没有信号(灯灭)时来判断黑线位置,避障需要靠有信 号(灯亮)时来判断障碍物位置。
(1)案件数量:根据最高法在劳动法解释(四)答记者会议上公布了如下数 据:2008年新收一审劳动争议案件29.55万件,2009年新收31.86万件,此 后,2010至2012年新收均在30万件左右。
(2)法律更新加速:国家及地方劳动法律制度建设的工作越来越快,1994年 出台《劳动法》;2001年出台《劳动法解释一》;2006年出台《劳动法解 释二》;2007年出台《劳动合同法》;2008年出台《劳动合同法实施条 例》;2010年出台《劳动法解释三》;2010年出台《社会保险法》;2012 年新修订《劳动合同法》;2013年出台《劳动法解释四》...... (3)强化企业责任:法律修订的方向是不断强化企业责任承担意识和义务, 保护广大劳动者的合法权益,
围等。 (2)员工病患风险,重大病疾史、过敏性病症、精神健康状态以及岗位禁忌或不宜的
疾病等。 (3)竞业禁止风险,企业可能成为共同被告、赔偿经济损失。
解决方案: (1)年龄、工种限制,人事部或行政部招聘时应当要求应聘人提供身份证件,验明身
份,核实应聘的工种是否符合岗位要求,并要求签署相关承诺书。 (2)员工病患,入职时要求员工如实填写专门的身体状况反馈表,如发现有重大病疾
红外避障传感器
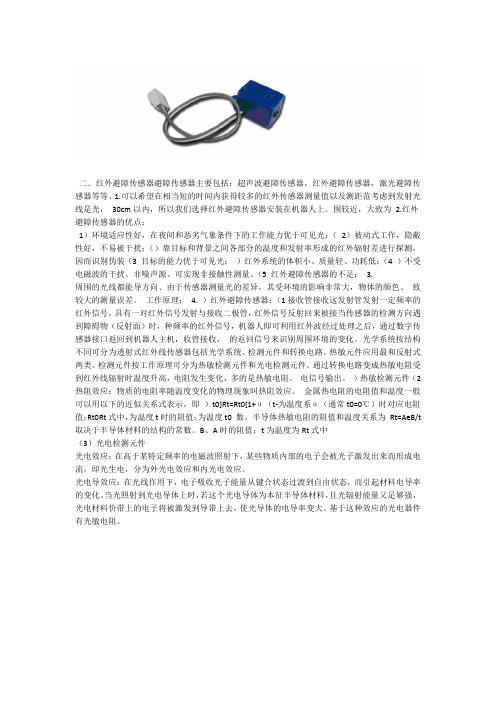
二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。
围较近,大致为 2.红外避障传感器的优点:1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。
(5 红外避障传感器的不足: 3.周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。
工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。
光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。
热敏元件应用最和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。
电信号输出。
)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。
金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。
半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。
B、A时的阻值;t为温度为Rt式中(3)光电检测元件光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。
红外避障小车原理介绍及制作

比例 图号 数量 共 张
第张
组别 第9组
•零件图 电机支架
电 机 支 架 比例 图号 数量 共 张 第张
设计
绘图
组别 第9组
审核
五、软件设计
•程序流程图:
Y N
智能境下对无人化作业的要求,机 器人在复杂地形中行进时自动避障及恶劣环境中无人 驾驶汽车的物资运输,自动避障是一项必不可少也是 最基本的功能设计。另外,市场现在的遥控玩具小车 遇到障碍物时不能自动避开障碍,需人工手动把玩具 车拿开,若加入自动避障功能可省去人工操作。
•系统总设计电路图如下图
•
各部分电路图及说明
•单片机最小系统
•L298电机控制驱动:
各部分电路图
•光耦电路
•电机保护电路
各部分电路图及说明
•模拟电源
四、机械部分
•总的装配图如下图:
•零件图 车身板
车身板
设计 绘图 审核
比例 图号 数量 共 张 第张
组别 第9组
•零件图 连杆
连杆
设计 绘图 审核
•功能:本品基于红外传感系统,采用红外传感器实现 前方障碍物检测,来实现自动检测前方障碍物,并能 通过单片机控制舵机实现左、右转弯来避开障碍物。
•应用场合及市场前景:可用于恶劣地理环境中无人驾 驶汽车的物资运输,及玩具小车的自动避障,可见, 自动避障车的应用前景广泛。
二、系统结构框图
三、硬件设计
LM393红外避障模块电原理图

LM393红外避障模块电原理图LM393红外避障模块电原理图模块电原理图模块描述该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明1 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。
其中黑色探测距离小,白色大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO4、比较器采用LM393,工作稳定;5、可采用3-5V直流电源对模块进行供电。
当电源接通时,红色电源指示灯点亮;6、具有3mm的螺丝孔,便于固定、安装;7、电路板尺寸:3.2CM*1.4CM8、模块已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)2 GND 外接GND3 OUT 小板数字量输出接口(0和1)4.工作电流是10ma以内如图所示壁障传感器模块。
红外避障小车原理介绍及制作PPT课件

零件图
连杆
连 杆
设计
比例 图号 数量 共 张
第 张
绘图 审核
组别
第9组
零件图
电机支架
电机支架
设计
比例 图号 数量 共 张
第 张
绘图 审核
组别
第9组
五、软件设计
程序流程图:
Y
N
二、系统结构框图
三、硬件设计
系统总设计电路图如下图
各部分电路图及说明
单片机最小系统 L298电机控制驱动:
各部分电路图
光耦电路 电机保护电路
各部分电路图及说明
模拟电源
四、机械部分
总的装配图如下图:
零件图
车身板
车 身 板
设计
比例
图号 数量 共 张
第 张
智能避障小车
一、概述
设计背景:针对高危环境下对无人化作业的要求,
机器人在复杂地形中行进时自动避障及恶劣环境中 无人驾驶汽车的物资运输,自动避障是一项必不可 少也是最基本的功能设计。另外,市场现在的遥控 玩具小车遇到障碍物时不能自动避开障碍,需人工 手动把玩具车拿开,若加入自动避障功能可省去人 工操作。 功能:本品基于红外传感系统,采用红外传感器实 现前方障碍物检测,来实现自动检测前方障碍物, 并能通过单片机控制舵机实现左、右转弯来避开障 碍物。 应用场合及市场前景:可用于恶劣地理环境中无人 驾驶汽车的物资运输,及玩具小车的自动避障,可 见,自动避障车的应用前景广泛。
红外寻迹避障电路总结
光电传感器一、反射式光电传感器简介反射式光电传感器在机器人中有着广泛的应用。
可以用来检测地面明暗和颜色的变化,也可以探测有无接近的物体。
这种光电传感器的基本原理是,自带一个光源和一个光接收装置,光源发出的光经过待测物体的反射被光敏元件接收,再经过相关电路的处理得到所需要的信息。
相应的,光谱范围,灵敏度,抗干扰能力,输出特性等都是反射式光电传感器的重要参数。
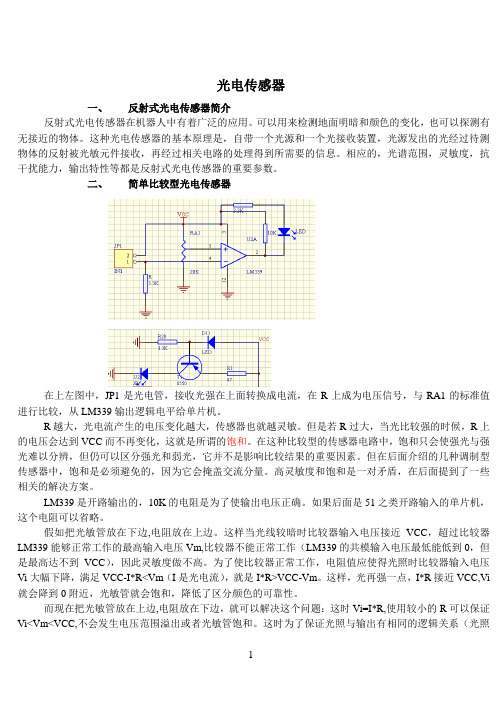
二、简单比较型光电传感器在上左图中,JP1是光电管,接收光强在上面转换成电流,在R上成为电压信号,与RA1的标准值进行比较,从LM339输出逻辑电平给单片机。
R越大,光电流产生的电压变化越大,传感器也就越灵敏。
但是若R过大,当光比较强的时候,R上的电压会达到VCC而不再变化,这就是所谓的饱和。
在这种比较型的传感器电路中,饱和只会使强光与强光难以分辨,但仍可以区分强光和弱光,它并不是影响比较结果的重要因素。
但在后面介绍的几种调制型传感器中,饱和是必须避免的,因为它会掩盖交流分量。
高灵敏度和饱和是一对矛盾,在后面提到了一些相关的解决方案。
LM339是开路输出的,10K的电阻是为了使输出电压正确。
如果后面是51之类开路输入的单片机,这个电阻可以省略。
假如把光敏管放在下边,电阻放在上边。
这样当光线较暗时比较器输入电压接近VCC,超过比较器LM339能够正常工作的最高输入电压Vm,比较器不能正常工作(LM339的共模输入电压最低能低到0,但是最高达不到VCC),因此灵敏度做不高。
为了使比较器正常工作,电阻值应使得光照时比较器输入电压Vi大幅下降,满足VCC-I*R<Vm(I是光电流),就是I*R>VCC-Vm。
这样,光再强一点,I*R接近VCC,Vi 就会降到0附近,光敏管就会饱和,降低了区分颜色的可靠性。
而现在把光敏管放在上边,电阻放在下边,就可以解决这个问题:这时Vi=I*R,使用较小的R可以保证Vi<Vm<VCC,不会发生电压范围溢出或者光敏管饱和。
红外避障传感器
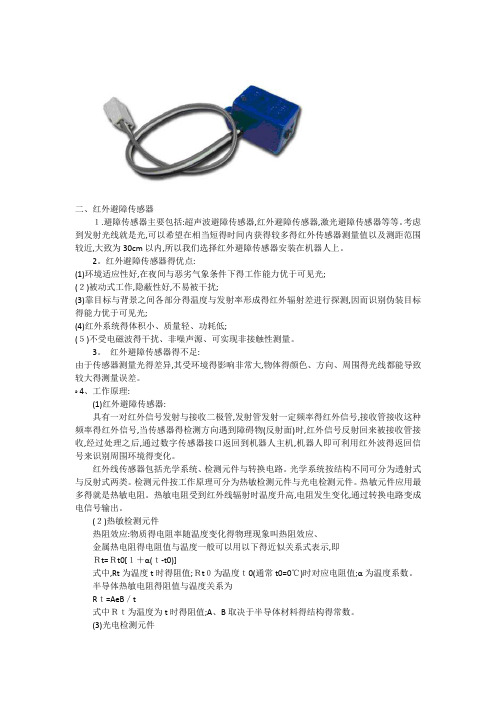
二、红外避障传感器1.避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
考虑到发射光线就是光,可以希望在相当短得时间内获得较多得红外传感器测量值以及测距范围较近,大致为30cm以内,所以我们选择红外避障传感器安装在机器人上。
2。
红外避障传感器得优点:(1)环境适应性好,在夜间与恶劣气象条件下得工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;(3)靠目标与背景之间各部分得温度与发射率形成得红外辐射差进行探测,因而识别伪装目标得能力优于可见光;(4)红外系统得体积小、质量轻、功耗低;(5)不受电磁波得干扰、非噪声源、可实现非接触性测量。
3。
红外避障传感器得不足:由于传感器测量光得差异,其受环境得影响非常大,物体得颜色、方向、周围得光线都能导致较大得测量误差。
ﻩ4、工作原理:(1)红外避障传感器:具有一对红外信号发射与接收二极管,发射管发射一定频率得红外信号,接收管接收这种频率得红外信号,当传感器得检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外波得返回信号来识别周围环境得变化。
红外线传感器包括光学系统、检测元件与转换电路。
光学系统按结构不同可分为透射式与反射式两类。
检测元件按工作原理可分为热敏检测元件与光电检测元件。
热敏元件应用最多得就是热敏电阻。
热敏电阻受到红外线辐射时温度升高,电阻发生变化,通过转换电路变成电信号输出。
(2)热敏检测元件热阻效应:物质得电阻率随温度变化得物理现象叫热阻效应、金属热电阻得电阻值与温度一般可以用以下得近似关系式表示,即Rt=Rt0[1+α(t-t0)]式中,Rt为温度t时得阻值;Rt0为温度t0(通常t0=0℃)时对应电阻值;α为温度系数。
半导体热敏电阻得阻值与温度关系为Rt=AeB/t式中Rt为温度为t时得阻值;A、B取决于半导体材料得结构得常数。
(3)光电检测元件光电效应:在高于某特定频率得电磁波照射下,某些物质内部得电子会被光子激发出来而形成电流,即光生电,分为外光电效应与内光电效应。