理论力学第七版答案 第九章
理论力学习题解答(8-13章)
对于一个物体,如果受到的合力为零,则该物体处于力的平衡状态。
力的平衡与运动状态
力的平衡状态下,物体的运动状态保持不变,即速度和方向都不发生变化。
力矩是力和力臂的乘积,表示力对物体转动作用的物理量。
力矩概念
力矩的方向
力矩的几何意义
力矩的方向按照右手定则确定,即右手四指从转动轴指向力的方向,大拇指指向转动方向。
动量定理,描述了物体加速度与其所受合外力之间的线性关系。
详细描述
牛顿第二定律,也被称为动量定理,表述为F=ma,其中F代表合外力,m代表质量,a代表加速度。该定律揭示了物体的加速度与作用在物体上的力成正比,与物体的质量成反比。
牛顿第二定律
作用与反作用定律,描述了作用力和反作用力大小相等、方向相反的特性。
伯努利方程
层流与湍流,定常流动与非定常流动,一维、二维、三维流动。
流体流动的分类
流体质量守恒,流量连续,无质量亏损或增加。
连续性方程
流体动力学基础
03
拉格朗日法
追踪流体质点运动的方法,描述流场中质点位置随时间变化。
01
微元体分析法
对流场中微小体积元进行分析,列出流体运动和力的平衡方程。
02
欧拉法
描述流体运动随时间变化的方法,基于流体质点运动观点。
天体运动的计算方法
天体运动的计算方法通常涉及到对万有引力定律的应用,以及运用运动学和动力学原理。
总结词
在计算天体运动时,首先需要确定天体的质量、位置和速度等参数,然后根据万有引力定律计算出天体之间的相互作用力。接着,运用牛顿第二定律和运动学原理,可以求解出天体的加速度、速度和位移等参数。最后,通过比较理论计算结果和观测数据,可以对天体运动的规律进行验证和预测。
理论力学课后习题答案第9章动量矩定理及其应用

(1)
(2)
对A:
(3)
又:
以O为基点:
(→)
(↓)(4)
由上四式联立,得(注意到 )
法2:对瞬心E用动量矩定理(本题质心瞬心之距离为常数)
又
可解得:
9-11图示匀质圆柱体质量为m,半径为r,在力偶作用下沿水平面作纯滚动。若力偶的力偶矩M为常数,滚动阻碍系数为 ,求圆柱中心O的加速度及其与地面的静滑动摩擦力。
解:对轮C:
对轮B和重物A:
运动学关系:
9-5图示电动绞车提升一质量为m的物体,在其主动轴上作用一矩为M的主动力偶。已知主动轴和从动轴连同安装在这两轴上的齿轮以及其它附属零件对各自转动轴的转动惯量分别为J1和J2;传动比r2:r1=i;吊索缠绕在鼓轮上,此轮半径为R。设轴承的摩擦和吊索的质量忽略不计,求重物的加速度。
(7)
将(5)、(6)、(7)代入(2)、(3)、(4)得
(8)
(9)
(10)
解得: ,与(1)式相同。
9-15圆轮A的半径为R,与其固连的轮轴半径为r,两者的重力共为W,对质心C的回转半径为,缠绕在轮轴上的软绳水平地固定于点D。均质平板BE的重力为Q,可在光滑水平面上滑动,板与圆轮间无相对滑动。若在平板上作用一水平力F,试求平板BE的加速度。
解:初始静止,杆开始运动瞬时, 必沿支承处切向,即沿AB方向,所以 此时沿AB方向,如图(a),以D为基点:
由
(1)
由AB作平面运动:
(2)
(3)
(4)
由(3),
解(1)、(2)、(4)联立
9-19如图所示,足球重力的大小为4.45N,以大小 =6.1m/s,方向与水平线夹40 角的速度向球员飞来,形成头球。球员以头击球后,球的速度大小为 =9.14m/s,并与水平线夹角为20 角。若球-头碰撞时间为0.15s。试求足球作用在运动员头上的平均力的大小与方向。
理论力学(第七版)课后题答案哈工大

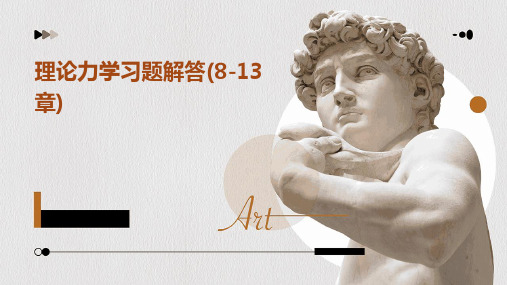
第1章 静力学公理和物体的受力分析
1-1 画出下列各图中物体 A,ABC 或构件 AB,AC 的受力图。未画重力的各物体的自 重不计,所有接触处均为光滑接触。
FN 1
A
P FN 2
(a)
(a1)
FT A P FN
(b)
A
(b1)
FN1
P
B FN 3
FR = (80i + 140 j ) N
FR = (80 N) 2 + (140 N) 2 = 161 N
2-2 如图 2-2a 所示,固定在墙壁上的圆环受 3 条绳索的拉力作用,力 F1 沿水平方向, 力 F3 沿铅直方向,力 F2 与水平线成 40°角。3 个力的大小分别为 F1=2 000 N,F2=2 500 N, F3=1 500 N。求 3 个力的合力。
C
FN 2
′ FN
B
P2
(a1)
FN1
(a) FN 1
B
C P2 FAy A
FN 2
FN
P1
P1
FAy
A F Ax
FAx
(a2)
(a3)
FN1
A P1 B P2
FN 3
FN 2
(b)
(b1)
′ FN
FN 1
A
B P2
FN 3
P1
FN
FN 2
(b3)
(b2)
3
理论力学(第七版)课后题答案 哈工大.高等教育出版社
F2 = 173 kN
如图 2-5a 所示,刚架的点 B 作用 1 水平力 F,刚架重量不计。求支座 A,D 的约
y F B C x
(彩色版第七版)理论力学哈工大课后题答案
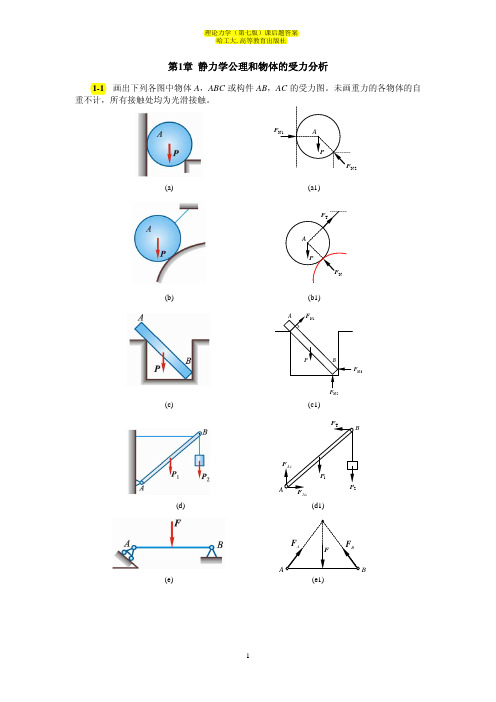
第1章 静力学公理和物体的受力分析1-1 画出下列各图中物体A ,ABC 或构件AB ,AC 的受力图。
未画重力的各物体的自重不计,所有接触处均为光滑接触。
2F(a)(a1)(b) (b1)2N F 3N(c) (c1)Ax(d) (d1)B(e) (e1)Bq(f) (f1)(g)1F 2(h)(h1)Ax(i)(i1)(j)(j1)F(k) (k1)BA F FF ′ (l) (l2) (l3)图1-11-2画出下列每个标注字符的物体的受力图。
题图中未画重力的各物体的自重不计,所有接触处均为光滑接触。
22N(a1)2AxFAx(a2)3N(b)(b1)N3′(b2) (b3)1N2AxF(c)(c1)1N2N2Ax(c2)(c3)(d) (d1)CDy(d2)(d3)CxBxByF By′(e) (e1)(e2) (e3)ByBxAx(f) (f1)AxBx F′(f2)(f3)FB(g) (g1)BCx′F(g3)(h)(h1)FFAxC(i) (i1) (i2)F(i3)(i4)AyFFFCy (j) (j1)(j2) 2TFDx3TEyFCyEx′(j3) (j4) (j5)BBDECyF(k)(k1)BBCx (k2) (k3) DEA1F(l) (l1) (l2)A C E(l3) (l4)或CDxFEyFEy(l2)’(l3)’ (l4)’F′(m)(m1)EADFH2FAD′(m2) (m3)BN(n)q3N(n2)G(o)(o1)BADB(o2) (o3) (o4)图1-2第2章 平面汇交力系与平面力偶系2-1 铆接薄板在孔心A ,B 和C 处受3个力作用,如图2-1a 所示。
N 1001=F ,沿铅直方向;N 503=F ,沿水平方向,并通过点A ;N 502=F ,力的作用线也通过点A ,尺寸如图。
求此力系的合力。
(a)(b)图2-1解 (1) 几何法作力多边形abcd ,其封闭边ad 即确定了合力F R 的大小和方向。
哈尔滨工业大学理论力学课后习题答案
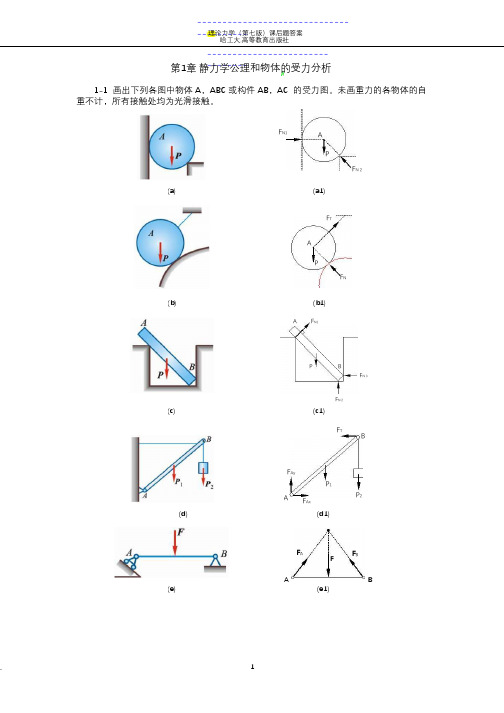
.----------------------------------------理论力学(第七版)课后题答案 哈工大.高等教育出版社 -------------------------------- 第1章 静力学公理和物体的受力分析1-1 画出下列各图中物体 A ,ABC 或构件 AB ,AC 的受力图。
未画重力的各物体的自重不计,所有接触处均为光滑接触。
F N1A PF N 2(a) (a1)F TA PF N(b)(b1)AF N1P BF N 3F N 2(c) (c1)F TBF AyP 1P 2AF Ax(d) (d1)F AF BFAB(e)(e1)qFF Ay F BF AxA B(f) (f1)FBC F CAF A(g) (g1)F Ay FCCA F Ax BP1 P2(h) (h1)BFCF CF AxDAF Ay(i) (i1)(j) (j1)BF B FCPF AyF AxA(k) (k1)F CAF AB 2 F AC CA2 F ABBF ACF BAA P (l) (l1)(l2)(l3)图 1-11-2 画出下列每个标注字符的物体的受力图。
题图中未画重力的各物体的自重不计,所 有接触处均为光滑接触。
F N 2C2 F P 2(a1) F N1N(a)BF N1BC F N 2F NP 2P1P1F AyF Ay F AxF AxAA(a2) (a3)F N1AP1F N3B P 2F N 2(b) (b1)2 F NF N3F N1ABP 2P1F N F N 2(b2)(b3)F AyF AxA C D F N2BP 2P 1F N1(c)(c1)F AyF TAF AxD2 F F N2TBP 1F N1P 2(c2)(c3)F AyF BqBAF AxCDF C(d)(d1)F DyF AyF BqqD2 FDxBAF AxCF Dx D 2 FDyF C(d2) (d3)F Ay2 FBxqBF AyF AxqAB 2F ByF AxF CxC F CyP F BxAB PF Cx (e1)CF ByF Cy(e)(e2)(e3)F 1CF 2F AyF ByABF AxF Bx(f)(f1)F Cx2 FCxCCF 1F CyF 2 F 2F AyCyF ByAF BxF Ax B(f2)(f3)F BF AyCBAF AxP(g)(g1)2 F CyF T2 FCxCF AyF BF TDCF AxBAF Cx P (g2)(g3)DF 1F CyF B2 F 2F BBCF CxBF Ay AF Ax(h)(h1)(h2)A F AxF AyF CyF CxC2 A F EF CyF F OyCDF OxF Cx 2EOB(i)(i1)(i2)A A2 F Ax2 FE2 F AyFEC D F ByF ByF OyF BxF OxF BxOBB (i3)(i4)F AyDE F CxF TA F AxF ByC CHF By F Cy BPF BxF BxB(j)(j1)(j2)F Ay F Dy 22 F Ey2 F CF Cx 2 E F AxT 2 D F T 22FExF ExA D F Dx 2E F DxF T3F T12FCyF DyF Ey(j3)(j4)(j5)EFF BCED2 BF Cx⎝2 2 F DEF Cy(k)(k1)F BF FC BF Cx⎝EC F Cy90︒ ⎝FDED DF AyF AyAAF AxF Ax(k2) (k3)F B2 FBF 1F DBBDCAF AF C(l)(l1)(l2)F 22 DF DF 1F 2DBAC EE F EF AF C F E(l3)(l4)或2 2 F DyF2F 1F F Dy F 2F 1B 2 DF DxF DxBBD D F ExA C E C E F ExF CF EyF AF CF Ey(l2)’(l3)’(l4)’2 F ADAF CyF CxCF 1B(m)(m1)F ADDF ADHEF 2A DF EF HF AD 2(m2)(m3)F N AAF kF N BF OyF OxBO(n) (n1)F N1B Dq2 F BF N 2F N3(n2)FB D FF C F EF AF G GCEA(o)(o1)FBB DFDF BF E F FF C F D2 FEA F AF B 2CD(o2)(o3) (o4) 图 1-2第2章 平面汇交力系与平面力偶系2-1 铆接薄板在孔心 A ,B 和 C 处受 3个力作用,如图 2-1a 所示。
理论力学答案完整版(清华大学出版社)9

F1 = F1(sinϑ i − cosϑ j) , F2 = F2i
点 A 和 B 的坐标及其变分为
rA = −(l1 − l2 )cosϑ i + (l1 + l2 )sinϑ j
,
rB = −2l1 cosϑ i
δrA = (l1 − l2 )sinϑ ⋅δϑ i + (l1 + l2 )cosϑ ⋅δϑ j ,
Fδ re − G1δ ra = 0 按速度合成定理,虚位移存在如下关系:δ ra = δ re tan β ,于是
(a)
题 9-9 图
导出 F = G1 tan β .
(2)水平面有摩擦时,当水平力 F 较小,斜面 D 有向左运动趋势,此时摩擦力方向向右,
临界平衡时,虚功方程为
(F + ) Fmax δ re − G1δ ra = 0 , 其中 Fmax = (G1 + G2 ) f 。求得: F ≥ G1 tan β − (G1 + G2 ) f .
i =1
解题要领 1) 对于自由度不为零的系统,求其平衡时主动力满足的关系可用虚功原理. 2) 对于自由度为零的系统,为求其约束力,可以依次解除一个约束,使自由度为 1,即将
此约束力作为主动力应用虚功原理. 3) 独立的坐标变分个数与系统的自由度相同,可以用解析或虚速度的方法建立不独立的坐
标变分满足的关系.
三 广义坐标表示的虚位移原理
广义坐标:确定质点系位形的独立坐标。
虚功原理的广义坐标表述:受理想约束的质点系,其平衡的充分必要条件是系统所有与广义
坐标对应的广义力为零
Qj = 0 ( j = 1,2,L, m)
∑ 其中
Qj
=
理论力学第七版答案--第九章
9-10 在瓦特行星传动机构中,平衡杆O 1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ;而曲柄OB 活动地装置在O 轴上,如图所示。
在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一体。
已知:r 1=r 2=0.33m ,O 1A =0.75m ,AB =1.5m ;又平衡杆的角速度ωO 1=6rad/s 。
求当γ=60°且β=90°时,曲柄OB 和齿轮Ⅰ的角速度。
题9-10图【知识要点】 Ⅰ、Ⅱ两轮运动相关性。
【解题分析】 本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。
【解答】 A 、B 、M 三点的速度分析如图所示,点C 为AB 杆的瞬心,故有 ABA O CA v A AB ⋅⋅==21ωω ωω⋅=⋅=A O CD v AB B 123所以 s rad r r v BOB /75.321=+=ωs rad r v CM v MAB M /6,1==⋅=I ωω 9-12 图示小型精压机的传动机构,OA =O 1B =r =0.1m ,EB =BD =AD =l =0.4m 。
在图示瞬时,OA ⊥AD ,O 1B ⊥ED ,O 1D 在水平位置,OD 和EF 在铅直位置。
已知曲柄OA 的转速n =120r/min ,求此时压头F 的速度。
题9-12图【知识要点】 速度投影定理。
【解题分析】 由速度投影定理找到A 、D 两点速度的关系。
再由D 、E 、F 三者关系,求F 速度。
【解答】 速度分析如图,杆ED 与AD 均为平面运动,点P 为杆ED 的速度瞬心,故 v F = v E = v D由速度投影定理,有A D v v =⋅θcos可得 s ll r n r v v A F /30.1602cos 22m =+⋅⋅==πθ 9-16 曲柄OA 以恒定的角速度ω=2rad/s 绕轴O 转动,并借助连杆AB 驱动半径为r 的轮子在半径为R 的圆弧槽中作无滑动的滚动。
理论力学(I)第九章课件(第7版哈尔滨工业大学)详解
x A f1 (t ) y A f 2 (t ) f 3 (t )
对于每一瞬时 t ,都可以求出对应的 x A , y A , , 图形S 在该瞬时的位置也就确定了。 二.平面运动分解为平动和转动
当图形S上A点不动时,则刚体作定轴转动。
当图形S上 角不变时,则刚体作平动。
故刚体平面运动可以看成是平动和转动的合成运动。
选取运动情况已知的点作为基点)
12
曲柄连杆机构
AB杆作平面运动 平面运动的分解
(请看动画)
13
§9-3
平面图形内各点的速度
一.基点法(合成法) 已知:图形S内一点A的速度 v A ,
vB 图形角速度 求:
取A为基点, 将动系固结于A点, 动系作平动。
取B为动点, 则B点的运动可视为牵连运动为平动和相对运动
8
例如
车轮的运动。
车轮的平面运动可以看成
是车轮随同车厢的平动和相对
车厢的转动的合成。
车轮对于静系的平面运动 车厢(动系Ax y ) 相对静系的平动
(绝对运动) (牵连运动)
车轮相对车厢(动系Ax y)的转动
(相对运动)
9
我们称动系上的原点A为基点,于是 刚体的平面运动可以 分解为随基点的平动 和绕基点的转动。
1
第九章 刚体的平面运动
§9–1 刚体平面运动的概述
§9–2 平面运动分解为平动和转动 ·
刚体的平面运动方程 §9–3 平面图形内各点的速度 §9–4 平面图形内各点的加速度 习题课
2
§9-1 刚体平面运动的概述
刚体的平面运动是工程上常见的一种运动,这是一种较为 复杂的运动.对它的研究可以在研究刚体的平动和定轴转动的 基础上,通过运动合成和分解的方法,将平面运动分解为上述
理论力学第七版课后习题答案
理论力学第七版课后习题答案第一章: 引言习题1-11.问题描述:给定物体的质量m=2kg,加速度a=3m/s^2,求引力F。
2.解答:根据牛顿第二定律F=ma,其中m表示物体的质量,a表示物体的加速度。
代入已知值,可求得F=6N。
习题1-21.问题描述:给定物体的质量m=5kg,引力F=20N,求加速度a。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=4m/s^2。
第二章: 运动的描述习题2-11.问题描述:一个物体以恒定速度v=10m/s匀速直线运动,经过t=5s,求物体的位移。
2.解答:位移等于速度乘以时间,即s=vt。
代入已知值,可得s=50m。
习题2-21.问题描述:一个物体以初始速度v0=5m/s匀加速直线运动,加速度a=2m/s^2,经过t=3s,求物体的位移。
2.解答:由于物体是匀加速直线运动,位移可以通过公式s=v0t+0.5at^2计算。
代入已知值,可得s=(53)+(0.52*3^2)=45m。
第三章: 动力学基础习题3-11.问题描述:一个物体质量为m=4kg,受到的力F=10N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2.5m/s^2。
习题3-21.问题描述:一个物体质量为m=3kg,受到的力F=6N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
第四章: 动力学基本定理习题4-11.问题描述:一个物体质量为m=8kg,受到的力F=16N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
习题4-21.问题描述:一个物体质量为m=6kg,受到的力F=12N,求物体的加速度。
2.解答:根据牛顿第二定律F=ma,将已知值代入,可求得a=2m/s^2。
以上是理论力学第七版课后习题的答案。
希望能对你的学习有所帮助!。
哈工大理论力学第七版课后习题答案(高清无水印版)
第1章 静力学公理和物体的受力分析1-1 画出下列各图中物体A ,ABC 或构件AB ,AC 的受力图。
未画重力的各物体的自重不计,所有接触处均为光滑接触。
2F(a)(a1)(b) (b1)2N F 3N(c) (c1)Ax(d) (d1)B(e) (e1)Bq(f) (f1)(g)1F 2(h)(h1)Ax(i)(i1)(j)(j1)F(k) (k1)BA F FF ′ (l) (l2) (l3)图1-11-2画出下列每个标注字符的物体的受力图。
题图中未画重力的各物体的自重不计,所有接触处均为光滑接触。
22N(a1)2AxFAx(a2)3N(b)(b1)N3′(b2) (b3)1N2AxF(c)(c1)1N2N2Ax(c2)(c3)(d) (d1)CDy(d2)(d3)CxBxByF By′(e) (e1)(e2) (e3)ByBxAx(f) (f1)AxBx F′(f2)(f3)FB(g) (g1)BCx′F(g3)(h)(h1)FFAxC(i) (i1) (i2)F(i3)(i4)AyFFFCy (j) (j1)(j2) 2TFDx3TEyFCyEx′(j3) (j4) (j5)BBDECyF(k)(k1)BBCx (k2) (k3) DEA(l) (l1) (l2)A C E(l3) (l4)或CDxFEyFEy(l2)’(l3)’ (l4)’F′(m)(m1)EADFH2FAD′(m2) (m3)BN(n)q3N(n2)G(o)(o1)BADB(o2) (o3) (o4)图1-2第2章 平面汇交力系与平面力偶系2-1 铆接薄板在孔心A ,B 和C 处受3个力作用,如图2-1a 所示。
N 1001=F ,沿铅直方向;N 503=F ,沿水平方向,并通过点A ;N 502=F ,力的作用线也通过点A ,尺寸如图。
求此力系的合力。
(a)(b)图2-1解 (1) 几何法作力多边形abcd ,其封闭边ad 即确定了合力F R 的大小和方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9-10 在瓦特行星传动机构中,平衡杆O 1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ;而曲柄OB 活动地装置在O 轴上,如图所示。
在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一体。
已知:r 1=r 2=0.33m ,O 1A =0.75m ,AB =1.5m ;又平衡杆的角速度ωO 1=6rad/s 。
求当γ=60°且β=90°时,曲柄OB 和齿轮Ⅰ的角速度。
题9-10图【知识要点】 Ⅰ、Ⅱ两轮运动相关性。
【解题分析】 本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。
【解答】 A 、B 、M 三点的速度分析如图所示,点C 为AB 杆的瞬心,故有 ABA O CA v A AB ⋅⋅==21ωω ωω⋅=⋅=A O CD v AB B 123所以 s rad r r v BOB /75.321=+=ωs rad r v CM v MAB M /6,1==⋅=I ωω 9-12 图示小型精压机的传动机构,OA =O 1B =r =0.1m ,EB =BD =AD =l =0.4m 。
在图示瞬时,OA ⊥AD ,O 1B ⊥ED ,O 1D 在水平位置,OD 和EF 在铅直位置。
已知曲柄OA 的转速n =120r/min ,求此时压头F 的速度。
题9-12图【知识要点】 速度投影定理。
【解题分析】 由速度投影定理找到A 、D 两点速度的关系。
再由D 、E 、F 三者关系,求F 速度。
【解答】 速度分析如图,杆ED 与AD 均为平面运动,点P 为杆ED 的速度瞬心,故 v F = v E = v D由速度投影定理,有A D v v =⋅θcos可得 s ll r n r v v A F /30.1602cos 22m =+⋅⋅==πθ 9-16 曲柄OA 以恒定的角速度=2rad/s 绕轴O 转动,并借助连杆AB 驱动半径为r 的轮子在半径为R 的圆弧槽中作无滑动的滚动。
设OA =AB =R =2r =1m ,求图示瞬时点B 和点C 的速度与加速度。
题9-16图【知识要点】 基点法求速度和加速度。
【解题速度】 分别对A 、B 运动分析,列出关于B 点和C 点的基点法加速度合成方程,代入已知数据库联立求解。
【解答】 轮子速度瞬心为P, AB 杆为瞬时平动,有s m r PC v srad rv s m R v v B C BB A B /828.222/42,/2==⋅=======ωωωωω 取A 为基点,对B 点作加速度分析,有 nBA tBA nA nB tB a a a a a ++=+ 由已知条件 0,,22===nBA A B nB a R a r v a ω解得 22/8,0s m rv a a Bn Bt B=== 取B 为基点,由C 点加速度的叠加原理,tCB n CB B C a a a a ++=由已知条件 0,,2=⋅==tCB B n CB n B B a r a a a ω故C 点加速度 222/3.11s m a a a CBn B C =+=9-19 在图示机构中,曲柄OA 长为r ,绕O 轴以等角速度转动,AB =6r ,BC =r 33。
求图示位置时,滑块C 的速度和加速度。
题9-19图【知识要点】 刚体的平面运动。
【解题分析】 分别对系统中B 点的速度和加速度进行分析,再利用矢量投影,列出方程,由几何关系代入数据即可求解。
【解答】 由速度分析图,有CB B C BA A B v v v v v v +=+=,由题设中已知数据得6,30sin 23,3,30sin 0200010ωωωωω=======BC v v v r v AB v v v CB B CBCBA A BA由加速度分析图,对AB 杆, nBA t BA n A B a a a a ++=由已知条件 AB a r a n BA n A ⋅=⋅=2120,ωω向AB 轴投影,得nBAn A B a a a -=2121 对BC 杆,nCB t CB B a a a a ++=C由已知条件 2220,31ωω⋅=⋅-=BC n CB B a r a 向BC 轴投影,得 2012323ωr a a a n CB B C =--= 9-24 如图所示,轮O 在水平面上滚动而不滑动,轮心以匀速O =0.2m/s 运动。
轮缘上固连销钉B ,此销钉在摇杆O 1A 的槽内滑动,并带动摇杆绕O 1轴转动。
已知:轮的半径R =0.5m ,在图示位置时,A O 1是轮的切线,摇杆与水平面间的交角为60°。
求摇杆在该瞬时的角速度和角加速度。
【知识要点】 平面运动,点的合成运动。
【解题分析】 本题先研究轮子的整体运动,再以销钉B 为动点。
选定不同的基点,最终得到不同的解答方程,联立方程,代入已知数据求解。
【解答】 对轮进行加速度与速度的分析,得到,0,0000===ωαωRv 以销钉B 为动点,摇杆为动系。
r e a v v v +=题9-24图得到 s radBO v v v v e e r /2.0,23,2310100====ωω 销钉B 的加速度为tBO n BO B a a a a ++=0 (1) c r n e t e B a a a a a +++= (2)联立(1)(2),得到c r n e t e n BO a a a a a +++=由已知题设条件r e n e te n BO v a B O a a B O a R a ⋅=⋅=⋅==012011011202,,ωωω由BO 1 轴上的投影可得 e nBO t e a a a -=解得21/046.01s rad BO a t e AO -==α 9-25 平面机构的曲柄OA 长为2l ,以匀角速度O 绕O 轴转动。
在图示位置时,AB =BO ,并且∠OAD =90°。
求此时套筒D 相对于杆BC 的速度和加速度。
【知识要点】 刚体的平面运动。
题9-25图【解题分析】 本题先对整个杆以及杆中D 、A 两点进行速度与加速度的分析,利用速度和加速度的合成公式求解。
【解答】 选BC 杆为动点,OA 杆为动系。
Br Be Ba v v v +=得到 l v l v Br Ba 0033,332ωω=⋅=AD 杆作平面运动,则DA A D v v v +=可得0032332334ωωωω==⋅=⋅=AD DA AD DA D v l v l v又有 B De Dr De D v v v v v =+=, 得到D 的相对速度 l l v v v B D Dr 0016.1332ωω=⋅=-= 加速度分析。
c Br nBe Ba a a a a ++=由题设所给的已知条件Br e n Be v a l a ⋅=⋅=0202,ωω由加速度投影,可得 l a Ba ⋅=2034ωADa l a ADt DAA nDAt DA A D ⋅=⋅=++=220,2ωωa a a a再一次投影,得到 l a D ⋅=2098ω Dr De Da a a a += 得到 l l a Dr 202022.2910ωω==9-29 图示平面机构中,杆AB 以不变的速度沿水平方向运动,套筒B 与杆AB 的端点铰接,并套在绕O 轴转动的杆OC 上,可沿该杆滑动。
已知AB 和OE 两平行线间的垂直距离为b 。
求在图示位置(=60°,=30°,OD =BD )时杆OC 的角速度和角加速度、滑块正的速度和加速度。
题9-29图【知识要点】 刚体的平面运动,点的运动合成。
【解题分析】 本题取B 为动点,再以OC 杆为动系,DE 、OE 杆作平面运动。
【解答】 由加速度c r ne t e B a a a a a +++=由已知条件r e c e n e v a OB a ⋅=⋅=ωω2,2由et a 方向的投影,得到 0=+c et a a得到 2202833,43bv a a b v a et et ⋅-==⋅-=OB 又选OC 为动系 v B =v e + v r 代入已知数据,得到 v v v v v v B r B e 2121,2323====v v v b v OB v e D e 432,430==⋅==ω DE 杆作平面运动,由 ED D e v v v +=得到 4,21332v v v v v ED D E ===nED t ED n D t D E a a a a a +++=由已知条件 EDv a a a a a ED nED n e n D t e t D2,21,21===由向DE 轴的投影,得到 bv a E 2387-=9-31 图示行星齿轮传动机构中,曲柄OA 以匀角速度O 绕O 轴转动,使与齿轮A 固结在一起的杆BD 运动。
杆BE 与BD 在点B 铰接,并且杆BE 在运动时始终通过固定铰支的套筒C 。
如定齿轮的半径为2r ,动齿轮半径为r ,且AB =5r 。
图示瞬时,曲柄OA 在铅直位置,BD 在水平位置,杆BE 与水平线间成角=45°。
求此时杆BE 上与C 相重合一点的速度和加速度。
题9-31图【知识要点】 刚体平面运动和点的运动的合成。
【解题分析】 本题先取出C 为动系,列出速度迭加方程求解;再取C '点,结合B 点,列出加速度叠加方程,联立求解。
【解答】 选套筒C 为动系,选BE 杆上的点B 和C '为动点,作速度分析,有 r e B v v v += 又由轮边缘线速度相同,有PB ⋅=rv v AB 解得 ()()()()0000062.021562.221523cos 87.625123sin ωωωωωϕθωωϕθ=-===-=+==+=+=BC v r r v ve r r v v e e B B r 由刚体性质,得到关联速度公式r v cr r c r 087.6,ω='==''v v v 又由加速度分析,有 0,=++=tBA tBA nBA A B a a a a a若选B 为动点,套筒为动系,有c r n e te B a a a a a +++=将上两式相加c r ne t e n BA A a a a a a a +++=+代入已知条件有上式在BC 上投影()r r a r 202073.135123ωω=+=再选C '点为动点,套筒为动系,得到加速度关系式 c c r c e c e ''''++=a a a a 由已知条件 r e c c r c a ar a ωω2,==''得到杆上C '点加速度为 r a a a c c r c202214.16ω=+=''。