AC双转台五轴联动数控加工中心的后置处理
关于五轴联动加工中心后置处理程序的开发

O
引 言
后 置 处 理 程 序 是 通 用 数 控 编 程 软 件 计 算 产
几 年 来 , 轴 联 动 加 工 中 心 虽 然 得 到 了 迅 速 发 五
展, 但相 比 三 轴 加 工 中心 , 绝 对 数 量 少 许 多 , 其 且 能 真 正 发挥 作 用 的就 更 少 。 即 使 有 成 功 运 用
Ke wo d :p s ・ r c s i g p o r m ;p s - r c s i g c n t u t r y r s o t p o e sn r g a o tp o e sn o s r c o ;He d n a n c n r l y t m i e h i o to se s
生 的 刀轨 源文 件 和 专 用 数 控 加 工 中 心 所 能 识 别
五 轴 联 动 加工 的 经 验 , 于 技 术 保 密 , 五 轴 联 由 或 动 的 运 动 方 式 不 一 样 等 , 难 搜 索 到 有 价 值 的 很
后 置 程 序 资 料 。另 外 , ap s机 床 制 造 商 只 有 P ra
的后 处 理 程 序 。 由 于 以 上 种 种 原 因 , 能 自主 只
开发 。
够 获 取 的信 息 资 料 较 多 , 于参 考 。即 便 如 此 , 便
D a n 后 置 处理 程 序 。 然后 在 该 设 备 上 进 行 N 程 序 的 空 运 行 、 切 、 式 加 工 等 i mo d C 试 正 调 试 工 作 , 通过 三 坐标 测 量 工件 的加 工 精 度 来 间接 验 证 后 置程 序 的 正确 性 等 控 制 方 并
法 , 终 实现 了P r a a n 最 ap sDi mo d的后 置 处理 程 序 的 开 发 。 关键 词 : 置 处理 程 序 ; 处 理 构 造 器 ; 登 汉控 制 系统 后 后 海
五坐标数控机床的后置处理方法探讨
五坐标数控机床的后置处理方法探讨本文介绍了后置处理系统的工作流程和APT文件含义,并以五坐标工作台双转动机床为例,分析了五坐标数控机床坐标变换原理,得出了如何将SurfCAM 生成的APT文件中的前置刀位数据转换成机床刀具的运动数据,再将其转换为数控机床能直接识别的NC文件的实现方法。
tags:Post-processingTool position APT fileFive-coordinate CN machine SurfCAM后置处理系统一般由数控机床的制造商或CAD/CAM系统开发商提供,包括若干个面向特定型号数控系统的后置处理程序。
但是使用专用后置处理系统最大的困难是标准不统一。
刀位数据文件格式和数控指令都应有相应的标准,针对同一内容,各个国际标准化组织及各国都有自己的标准,相互间有所差别。
不同的CAD/CAM系统中的刀位文件格式可能不同,不同的数控系统的数控指令也可能会遵从不同的标准。
当需要修改这些后置处理程序,或要为新型数控系统配置后置处理程序时,就变得十分困难。
因此需要编制通用后置处理程序,可以从不同CAD/CAM系统刀位文件中取刀位数据,将CAM软件生成的前置刀位数据转换成机床刀具的运动数据,再将其转换为数控机床能直接识别的NC文件。
五坐标数控机床可实现复杂曲面的加工,在模具加工企业应用较广,所以在此以五坐标工作台双转动机床为研究对象,对其后置处理过程进行探讨。
1.后置处理系统的工作原理后置处理的主要任务是根据具体机床的运动结构和控制指令格式,将前置计算的刀位数据变换成机床各轴的运动数据,并按其控制指令格式进行转换,成为数控机床的加工程序。
后置处理流程如图1所示。
它采用解释执行方式,逐行读出刀位文件中的数据记录,分析该记录的类型,根据机床结构进行运动变换,并按机床控制指令格式转换成相应的程序代码,形成实际数控机床的加工程序。
2.APT文件格式APT语言文件是根据零件图纸和工艺流程产生的一种刀位文件格式,它只反映零件的形状尺寸和加工过程,描述当前的机床状态及刀尖的运动轨迹,它的内容和格式不受机床结构、数控系统类型的影响,是国际通用的文件格式,目前MasterCAM、SurfCAM等模具数控加工常用软件均具有生成APT文件的功能。
AC轴工作台旋转型五轴机床后置处理中的XYZ冗余运动优化问题
c i i g t .B n l z g t e c l u ain o o t p o e s g f r y e5 a i ma h n o , i l h n n i me y a ay i ac lt f s- r c si t p - x s c i et l a smp e n h o p n o AC o c n l so so t i e o cu i n i b a n d:W h n t e to ah i c o e tr e t n p it f i a d C a i , h v — e o l t ls rt i e s c i on a s n s t emo e h p s on o o Ax x
工艺与检测 nga 0yn l d o
AC轴 工作 台 旋转 型 五 轴机 床 后 置 处理 中的 XY Z冗 余 运 动优 化 问题
冯志新① 孟冬菊① ②
( 北 京 电子科技 职业 学院 , 京 102 ; ① 北 0 08
②天津科技大学机械工程学院, 天津 302 ) 022
摘 要: 深入 研究 了 A C轴 工作 台旋 转型 五轴机 床后 置处理 中 的 、 、 y z轴 冗余 运动 优化 问题 。对 于 五轴机
② C l g f c a i l n ier g Taj nvri f cec o eeo h n a E gnei , i i U i syo i e& l Me c n nn e t S n
T cnlg 。 i j g3 0 2 , H eh ooy Ta i 0 2 2 C N) nn
关键 词 : 轴加 工 五 后置 处理 优化
中图分类号 : G 5 T 69
文献 标识码 : A
Op i z e Mo e n s o t mie Th v me t fX,Y,Z e y e 5 a i Ax s AC T p - xs
五轴数控加工3D刀具补偿及其后置处理方法
五轴数控加工3D刀具补偿及其后置处理方法
五轴数控加工是一种高精度、高效率的加工方式,广泛应用于航空航天、汽车制造、模具制造等领域。
在五轴数控加工中,刀具路径的生成是非常关键的一步,而刀具路径的生成又离不开刀具补偿和后置处理。
本文将介绍五轴数控加工3D刀具补偿及其后置处理方法。
1. 五轴数控加工中的刀具补偿
在五轴数控加工中,由于刀具的形状和轴向的转动,刀具的实际切削轨迹与数控程序中指定的切削轨迹存在一定的偏差。
为了获得精确的加工结果,需要对刀具进行补偿。
常见的刀具补偿方式有NURBS曲线、点刀具轨迹法和法向刀具轨迹法。
NURBS曲线是一种数学曲线,可以用来描述任意形状的刀具。
点刀具轨迹法是在数控程序中加入一组补偿点,通过插补算法生成实际刀具轨迹。
而法向刀具轨迹法是通过计算刀具法向量的变化来进行刀具补偿。
常见的后置处理方法有线段切削点投影方法和圆与球表面切削点投影方法。
线段切削点投影方法是将所有切削路径的线段与工件表面求交,求得切削点坐标。
圆与球表面切削点投影方法是将切削路径的线段与工件表面求交,然后利用球心坐标和球面半径来求得切削点坐标。
五轴数控加工中的刀具补偿和后置处理是确保加工精度的重要环节。
通过合理选择刀具补偿方法和后置处理方法,可以使数控机床更好地理解刀具轨迹,从而获得更高的加工精度和效率。
五轴联动数控加工后置处理研究

五轴联动数控加工后置处理研究一、零件表面质量的提高1.抛光处理:通过抛光工艺,可以提高零件表面的光洁度,使其呈现出光亮的效果。
具体的抛光方法包括机械抛光、化学抛光和电解抛光等。
机械抛光可通过使用不同粒径的研磨材料和抛光剂进行研磨,去除表面的毛刺和痕迹;化学抛光利用酸碱溶液对零件进行化学反应,使其表面得到一层平整的氧化膜;电解抛光则是通过电解反应来实现表面的光洁度提高。
2.镀膜处理:通过在零件表面进行镀膜处理,可以提高其耐腐蚀性和耐磨性。
常见的镀膜方法有电镀、喷涂和热浸镀等。
电镀是将金属离子通过电化学反应沉积在零件表面,形成一层金属保护层;喷涂则是通过高压喷枪将涂料喷涂在零件上,形成一层保护膜;热浸镀则是将零件在熔融的金属溶液中浸泡,使金属渗入零件表面形成一层保护层。
3.磷化处理:磷化是将金属表面转化为磷化物层的一种化学反应。
磷化处理可以提高零件表面对磨损、腐蚀和润滑剂的耐受性,同时还能增加零件的粘附力,提高其涂层的附着力。
磷化处理常用的方法有热磷化和化学磷化两种。
热磷化是将零件通过加热的方式与磷酸盐反应,形成一层磷化物层;化学磷化则是通过蚀剂和酸性溶液对零件进行处理,使其表面与磷酸盐发生化学反应,生成磷化物层。
二、零件功能性的提高1.增强强度:通过热处理等方法,可以使零件的强度得到提高。
热处理是将零件在一定的温度下进行加热处理,使其晶粒结构发生变化,从而改善其机械性能。
热处理方法包括退火、正火、淬火和回火等。
通过合理的热处理工艺,可以使零件的强度得到提高。
2.表面涂覆:通过在零件表面涂覆一层功能性材料,可以改善零件的摩擦、磨损和耐蚀性能。
涂覆材料可以选择硬质合金、陶瓷、聚合物等。
具体的涂覆方法包括喷涂、热喷涂、电化学沉积和化学气相沉积等。
通过合理选择涂覆材料和涂覆工艺,可以使零件的功能性得到提高。
3.零件组装:对于一些复杂的零件,在加工后需要进行组装。
组装可以通过焊接、铆接、螺栓连接等方式实现。
双转台五轴立式机床专用后置处理算法

双转台五轴立式机床专用后置处理算法韩飞燕,郭卫,张武刚,张武(西安科技大学机械工程学院,陕西西安710054)来稿日期:2019-09-06基金项目:国家自然科学基金青年基金项目(51905418);陕西省自然科学基础研究计划企业联合基金项目(2019JLM-37);中国博士后科学基金面上项目(2018M633537);陕西省自然科学基础研究计划(2018JQ5086)作者简介:韩飞燕,(1983-),女,陕西武功人,博士研究生,讲师,主要研究方向:复杂曲面的计算机辅助几何设计及多轴数控加工理论与工艺方法研究1引言在数控编程中,根据数控机床的运动结构和数控系统的指令格式,把工件坐标系中的刀位数据转换为机床能够识别的1加工代码的过程称为后置处理。
后置处理作为CAM 自动编程软件与数控设备联结的纽带,是数控编程技术的重要组成部分,影响着数控编程技术的使用效果、零件的加工质量和机床运行的可靠性[1]。
后置处理技术的研究一直备受关注,各CAD/CAM 编程软件厂家都研发了通用后置处理系统,然而,大多数用户对CAD/CAM 软件的使用集中在CAD 模块,对CAM 模块的使用率并不高,这是因为CAM 软件只配备了通用后置处理,许多特定结构的数控机床无法使用CAM 模块进行后置处理,大大影响CAM 模块的应用效果。
此外,许多学者对后置处理技术也进行了广泛的研究,文献[2]采用机构学理论,建立了一种通用五轴机床的机构学模型,并提出通用五轴机床后置处理方法。
文献[3]提出了H5-800五轴卧式数控机床的专用后置处理算法。
文献[4]分析了双转台五轴机床的运动关系,开发了UCP600五轴机床专用后置处理程序。
文献[5-7]提出了DMU 系列非正交双转台五轴机床的后置处理方法。
文献[8-9]提出了非正交转台结构、非正交摆头结构五轴机床的后置处理方法。
随着数控机床与数控系统的迅速发展,具有不同结构和固定加工功能的五轴机床得到了广泛应用。
AC轴工作台旋转型五轴机床后置处理中的XYZ冗余运动优化问题
发生。 至此,可以给出一个实用的结论来指导工件的
摆放位置:尽量把刀具路径摆放在离 AC 轴回转中心
交点附近的位置,这样可以减少后置处理后 X、Y、Z 轴
的冗余运动。
根据这个结论,可以给出一种简单的办法来优化
工件的位置。 把所有刀尖点的平均位置作为工件坐标
系的原点,它可以表示为
n
n
n
移 移 移 po
=
的目标是让刀轴先后回转两个角度以后可以垂直。 按
照此思路,把刀轴平移到机床坐标系原点。 先绕着 C
轴回转一个角度 琢,使得刀轴在 y1 -o-z1 平面内,可得
ìïarcsin( x ) + 仔
ï 琢=í
x2 + y2
(1)
îïïarcsin(
x) x2 + y2
然后再让刀轴绕着 A 轴回转 茁 达到与 z1 轴平行的位 置,可得
( pi ,ti ) ,按照公式(1) 和(2) 容易计算得到两组旋转矩
阵 Rot( x1 ,茁i-1 ) Rot( z1 ,琢i-1 ) 和 Rot( x1 ,茁i ) Rot( z1 ,琢i ) ,
为了表达方便把其简写为 Rot ( 琢i-1 , 茁i-1 ) 和 Rot ( 琢i ,
茁i) ,设后置处理完后两个刀尖点的位置表示为 p忆i-1 ,
3摇 结语
对于一般的五轴机床都有基本的后置处理计算方 法,但是对于后置处理的优化问题的研究较少。 本文 通过对 AC 轴回转工作台五轴机床的后置处理算法分 析,研究了工件摆放位置对于后置处理得到的 X、Y、Z 轴运动长度的影响。 得出了以下结论:让刀具路径尽 量靠近 AC 两个回转轴中心线的交点,可以减少后置 处理得到的 X、Y、Z 轴的冗余运动。 以此为依据,给出 了一种简单实用的工件位置优化计算方法。 并在数值 试验中证明了优化的位置可以显著地减少 NC 代码的 加工时间。 本文研究的问题和提出的方法可以为五轴 加工中的夹具设计提供重要的参考。
五轴机床旋转轴偏置的后置处理算法研究
(6)
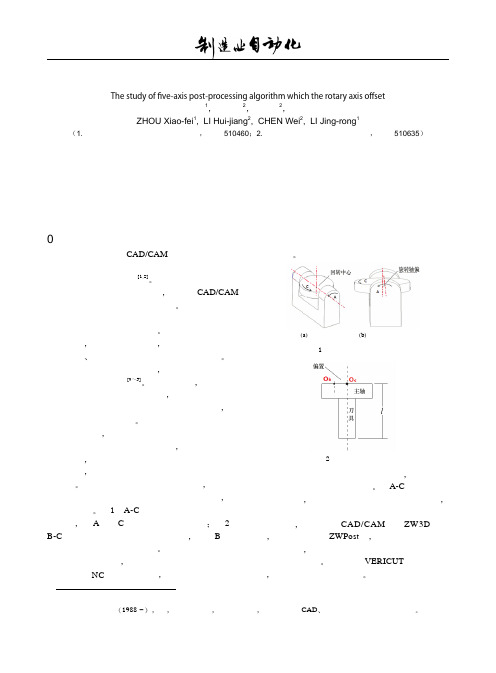
由上图可知 , 用传统的没有偏置补偿的后处 理算法得到的NC代码,在具有旋转轴偏置的数控 机床上加工时 , 会产生较多的过切和残留 , 而用 引入偏置补偿后的算法计算得到的NC代码进行加 工时 , 能得到正确的加工模型 。 由上述仿真结果 可知,文中所推导的后置处理算法是正确的。 2.2 加工实例验证 本实验所采用的数控设备是带 GSK218 数控 系统的A-C转台型五轴数控机床,实验加工零 件为 3.1 节中仿真实验所用的叶轮模型 , 毛坯为 ф 80 × 60 的圆柱 。 装夹毛坯后 , 经测量 , 机床 A 轴旋转中心到工件坐标系的偏置为(0,0,-59.793), 机床 C 轴旋转中心与工件坐标系重合 , 即偏置为 (0,0,0) , 在开发的后置处理器界面中设定该偏置 值,如图6所示。将刀轨文件用此配置的后置处理 得到NC加工代码,将此NC代码传入数控机床中, 加工得到的叶轮如图7所示。经测量,加工结果的 尺寸精度 、 表面的粗糙度均满足设计要求 。 由此 可知,本文公式推导模型是正确的。
j C 90 arctan i j C 270 arctan i C 270 arctan j i C 90 arctan j i
( (
i0 ) j0
i0 ) j0 i0 ( ) j0 ( i0 ) j0
(4)
(a) 偏置补偿前的切削效果
(b) 偏置补偿前的切削效果
(5)
图5 切削效果对比图
X ' (cx cx cos C c y sin C ) ' Y (c y cx sin C c y cos C ) cos A (a y a y cos A az sin A) ' Z (c y cx sin C c y cos C ) sin A (az a y sin A az cos A)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AC双转台五轴联动数控加工中心的后置
处理
摘要:数控加工技术已经成为现代制造业中不可或缺的一部分,它可以高效地完成各种零部件的加工任务,并且具有高精度、高效率的特点。
AC双转台五轴联动数控加工中心可以完成更加复杂的加工任务,在加工完成后还需要进行后置处理,以保证加工零件的质量和精度。
文章以AC双转台五轴联动数控加工中心为研究对象,研究其后置处理的可行性,以期为多轴设备提供有效保障。
关键字:双转台;五轴联动;后置处理
前言
在数控编程过程中,前置处理指的是刀位的轨迹计算过程。
基于相对运动这一原理,一般在工件坐标系当中来计算刀位的轨迹,无需将机床结构、指令的格式考虑进去,以使前置处理通用化,保证前后置处理能够各自负责相应的任务。
为了读取最终加工程序,就需要对前置处理得到的刀位数据进行转换,形成机床程序代码,这一过程就是后置处理。
在航空领域,AC双转台五轴联动数控加工中心的后置处理起着重要保障作用,本文主要以AC双转台五轴联动数控加工中心的后置处理展开探究。
1后置处理的概述
1.1 概念
后置处理属于数控加工和CAM系统间的桥梁,其主要任务就是对CAM软件生成的刀位轨迹进行转化,使其成为符合特定数控系统、机床结构的加工程序。
1.2 主要任务
五轴联动数控加工中心的后置处理有着重要的任务,主要是结合机床的控制
指令格式、运动结构等要求,对于前置处理所生成的刀位数据文件进行转变,使
其成为机床各轴的运动数据,然后,依据控制指令的具体格式,将其进行转换,
形成数控加工中心的加工程序。
具体而言,可以将后置处理的任务分为几下几点:
①机床运动学转换
五轴联动数控编程所生成的刀位数据,通常指的是刀具与工件坐标系相对的
刀心具体位置、刀轴矢量数据。
在机床的运动转变下,其主要是依据实际运动结构,对刀位文件当中的数据信息进行转换,使其成为不同运动轴上的数据信息。
②非线性运动误差的校验
非线性运动误差的校验是在CAM系统计算刀位数据时进行的,这个系统使用
离散直线来近似工件轮廓。
只有当刀位实际运动为直线时,才能与编程的精度相
匹配。
在多坐标加工中,基于旋转运动其自身的非线性特点,由机床各个运动轴
线性合成的实际刀位运动,可能会与编程直线之间有很大的偏离。
所以,需要检
查并修正这个误差,一旦超过容许误差范围,就需要进行必要的修正。
③进给速度的校验
进给速度的校验涉及刀具接触点或刀位点与工件表面的相对速度。
在多轴加
工的过程中,在回转半径的作用下,由于其具有一定的放大作用,当把合成速度
转换到机床的坐标时,可能会导致平动轴出现较大的变动,甚至比机床的伺服能
力要大,也可能比机床、刀具的负荷能力还大。
所以,应该基于以上各中介能力
进行校验和修正。
④生成数控加工程序
基于数控系统要求的指令格式,对机床运动数据进行转换,使其成为机床的
程序代码。
完成该过程以后,应进行逐行解释与执行,然后结合刀位文件,将行
的类型记录下来,以此判断是对机床坐标的转换,还是代码的转换,一直持续到
刀位源文件结束。
以某航空制造企业的AC双转台五轴联动数控加工中心为研究对象,使用
UG/Post Builder后处理构造器,对设备配置的数控系统开发专用的后置处理器,并使用VERICUT仿真软件进行验证。
2.1后置处理开发流程
以UG软件为例,后置开发的流程是先将机床的各项数据进行全面搜集,选
择具体的机床类型以及后置处理类型,接着,合理设置运动轴参数,以及程序和
刀轨的参数,之后进行自定义参数设置,并测试是否合格,若结果不合格,则需
要重新返回设置运动轴参数,若结果合格则结束[2]。
2.2后置处理开发
德玛吉DMU 75 monoBLOCK较为典型,其配置的3D数控系统为Heidenhain iTNC 530 HSCI。
其加工产品类型多样,包括发动机舱盖模具、钢制刀塔等等。
其参数为:750mm的X轴行程,NC数控回转摆动工作台,18,000 rpm转速的电主
轴和60位刀库,能够提供最高整体性能,可以加工840mm直径和600kg重量的
工件,而占地面积不足8m。
依据上述流程,后置处理分为以下几步:
①搜集机床的型号、行程、控制系统等各种数据信息。
②定制后置处理。
③合理设置转台旋转平面。
④在导轨、程序的标签中,先选择程序,然后设置相应的起始序列,并设置
工序起始序列、结束序列以及程序结束序列。
⑤完成各项设置之后,点击保存,然后退出。
⑥最后,进行集成后置处理,在安装目下,将其配置文件打开,然后添加相
应的后置处理文件。
在刀轨设计中,使用UG NX12.0软件进行大力神杯导轨设计。
对于零部件,
利用VERICUT软件,对其进行NC仿真加工。
在具体实践中,先进行虚拟机床的
搭建,将其用来模拟仿真。
通过结合机床的运动结构等各种要求,在软件中搭建
好相应的框架,具体包括机床本体、刀库、操作面板、清理机构、机械手、A轴、Y轴。
完成框架搭建之后,导入相对应的组件模型当中即可。
接着,将虚拟机床进行初始化设置,完成之后,在软件中搭建虚拟机床。
根
据前期开发的后置处理文件,生成相应的代码程序,然后进行验证、模拟、优化,对大力神杯进行仿真加工,结果发现整个过程中并未出现碰撞以及其他的问题[3]。
3.5实体加工
通过使用UG软件,对大力神杯进行刀轨规划,并借助专用的后置处理器,
生成NC程序仿真,且确保无误时,则需要进行实体加工,对这一方法的高效性、精度进行有效验证,通过检验每一项的零件加工指标,其结果全部与设计的要求
相符。
最终,通过借助VERICUT软件和UG软件,对Heidenhain iTNC 530 HSCI
专用后置处理进行开发,在仿真以及实体加工验证之后,发现UG软件有着十分
强大的功能,后置处理开发模块也具有较强的人性化特点。
VERICUT软件在具体
使用中,其仿真效果极佳,有效保障了实体加工,对于实际生产的要求也能够满足,不仅可以促进设备使用效率的提升,还有助于节约成本。
结语:AC双转台五轴联动数控加工中心是现代制造业中不可或缺的一部分,
它具有高精度、高效率等特点。
后置处理包括清洗、抛光、涂漆、热处理等一系
列工艺,其主要目的在于去除表面的毛刺、氧化层,提高加工表面的光洁度和耐
腐蚀性,同时也可以改变材料的硬度、强度等性能。
在进行后置处理时,需要根
据产品的材料和用途选择合适的后置处理方法,并按照流程进行操作,以保证加
工产品的质量和准确性。
参考文献:
[1]丁飞,李衍忠,王帅.基于hyperMILL软件的轮胎模具五轴联动数控编程与
加工技术[J].金属加工(冷加工),2021(05):55-58.
[2]黄鑫,杨馥涛,王玉琨等. 五轴联动数控加工中心及其在智能制造中的应
用[C]//陕西省机械工程学会.陕西省机械工程学会2013年论文汇编.《装备制造》编辑部,2022:15-20.
[3]佛新岗.AC双转台五轴联动数控加工中心的后置处理研究[J].工业加
热,2021,50(02):5-9.。