五轴机床分类运动学建模及后置处理验证
应用Tcl语言实现非正交五轴联动数控机床后置处理

收稿日期:2009-12-02作者简介:刘东杰(1977-),男,工程师,主要从事CAD/CAM 精密制造技术研究.结构与工艺应用T cl 语言实现非正交五轴联动数控机床后置处理刘东杰(东北电子技术研究所,辽宁 锦州 121000)摘 要:针对非正交五轴联动数控机床,即转动工作台与主轴成45 倾角的特殊双转台五轴联动数控机床,进行了机床结构分析,通过对机床运动学求解,提出了刀位点后置处理坐标变换的计算方法,推导出相应的坐标变换公式,并将该算法成功应用到T cl 语言编程中,实现了非正交五轴联动数控机床后置处理程序编制.该后置处理程序稳定可靠,并已成功应用于工程实际中.关键词:T cl 语言;后置处理;五轴联动中图分类号:TG 502.1;TP 312 文献标识码:A 文章编号:1673-1255(2010)01-0075-04Achieved Post Processing for Non Orthogonal 5 axisLinkage CNC Machine by Programming with Tcl LanguageLIU Dong jie(Nor theast Resear ch I nstitute of Electronics T echnology ,Jinz hou 121000,China)Abstract:After analyzing the structure and kinem atics features of 5 ax is linkage CNC machine w ith tw o ro tary tables and one of the rotary axis fix ed at angle of 45 to the spindle,the algorithms for the post processing method of cutter location data are proposed and the corresponding formulate of coordinate conversion are de duced,the post processing for non orthogonal 5 axis linkag e CNC machine by programming w ith Tcl languag e is achieved.The post processor is stable and reliable,and put into practical application. Key words:T cl language;post processing;5 ax is linkage 数控加工设备的结构形式逐步趋向紧凑化、集成化、复杂化、多样化,现代数控加工机床的加工程序编制仅仅依靠手工编程的方式,在准确率和编程效率上已经不能满足复杂、精密零件的加工要求,甚至一些复杂加工程序是无法用手工编程的方式来实现的.随着计算机技术的不断发展,计算机辅助制造(CAM )技术日臻完善,CAM 软件已经被广泛应用于航空、航天、医疗、汽车、电子等诸多领域.其中,西门子公司的UG NX 辅助设计制造软件是目前主流的计算机辅助CAD/CAM/CAE 集成设计软件之一.利用U G NX/CAM 编制数控加工程序,一般包括前置处理和后置处理2个过程,如图1所示.图1 程序处理过程前置处理是指在计算机辅助制造过程中,将CAD 设计的模型,通过CAM 软件模块计算产生的刀位轨迹的整个过程.前置处理产生的是刀位轨迹源文件(cutter location source file),要将其转换成机第25卷第1期2010年2月光电技术应用EL ECT RO-O PT IC T ECHNOL OGY APPL ICAT I ONVol.25,No.1Februar y.2010床能够识别的G 代码就必须通过后置处理来完成.因此,后置处理是数控加工中的一个重要环节,其主要任务是将CAM 软件生成的刀位轨迹源文件转成特定机床可接收的数控代码(NC)文件[1].不同的数控机床,因控制系统的不同,对其数控程序要求的代码格式辅助命令等使用不同.因此要针对不同的数控系统生成不同的后置处理生成器[2].到目前为止,机床后置处理算法研究基本成熟,但如何运用已有的成熟算法解决实际加工中具体机床的NC 程序后置处理问题,用于实际零件加工,仍然具有重要的工程应用价值[3].以德马吉非正交五轴联动数控机床DM U50V 为例(即转动工作台与主轴成45 倾角的特殊双转台五轴联动数控机床),分析机床结构,建立了机床结构运动学数学模型及算法.并介绍了如何将数学模型及算法写入Tcl 语言,完成后置处理程序的编制.1 机床运动学算法分析DMU50V 数控机床结构采用双轴数控回转摆动工作台,机床运动坐标包括X 、Y 、Z 3个移动坐标和转动轴C 及与Z 轴成45 夹角的转动轴B ,如图2所示.其中,C 轴为任意角度,B 轴的运动范围是0 ~180 .机床第4轴B 轴与Z 轴交点与机床原点之间的距离H 是机床的一个重要参数,如图3所示.该参数影响工作台旋转后的坐标[4].图2 DM U 50V 机床坐标系假设工件坐标系O W x yz 与机床坐标系OX YZ 平行,且O W 在机床坐标系OX YZ 中的坐标为(x 0,y 0,z 0),工件坐标系中任意点的刀具中心位置即刀位点为(x w ,y w ,z w ),假定刀轴矢量为单位向量n,n =a x i +a y j +a z k (a z !0).从而,确定加工点(x w ,y w ,z w )时,机床运动坐标X 、Y 、Z 、B 、C 的值[5].图3 旋转工作台坐标关系1.1 确定机床B 、C 轴旋转角度将任意刀轴矢量ON 的起点移到机床坐标系的原点,并平移B 轴使之过O 点.在实际加工中,B 、C 轴的运动方向都是刀具相对工作台的运动方向,与工作台的实际运动方向相反,因此问题可转化为任意刀轴矢量ON 如何转化成ON 0(如图4所示),即如何将刀轴矢量旋转到与机床坐标系Z 轴方向一致的位置.要达到上述要求需进行4次旋转:(1)将刀轴矢量ON 绕Z 轴顺时针旋转一周,形成一个圆弧;(2)将单位矢量ON 0绕B 轴旋转形成一个半圆弧(0 ∀B ∀180 ),2个圆弧产生交点M ;(3)将刀轴矢量ON 绕Z 轴旋转角度C 至OM ;(4)将OM 绕B 轴顺时针旋转角度B 至ON 0.从而,使任意刀轴矢量与Z 轴重合.图4 旋转工作台角度计算根据图4中向量关系可推导出OM =OO 1O 1M =a z k +a 2x +a 2y(cos C #i +sin C #j )(1)OM =OO 2O 2M =12(-j +k )+22∃(22cos B (j +k )+sin Bi)(2)由式(1)、式(2)可得cos B =2a z -1C #=arcsin (1-a z a 2x +a 2y)得出机床的旋转坐标为76光 电 技 术 应 用 第25卷B =arccos (2a z -1)(3)C =arcsin (1-a za 2x +a 2y)+C %(4)其中,C %为向量ON 与X 轴的夹角,根据向量所在象限的不同,具体取值随之变化.令a 2x +a 2y =a xy,则旋转角度C 可表示为C =arcsin 1-a z a xy +arctan a ya xa x >0a y >0arcsin 1-a za xy+90a x =0a y >0arcsin1-a z a xy +arctan a ya x+180 a x <0a y >0arcsin 1-a za xy+180a x <0a y =0arcsin 1-a z a xy +arctan a ya x -180a x <0a y <0arcsin 1-a za xy -90a x =0a y <0arcsin 1-a z a xy -arctan a ya x a x >0a y <0arcsin1-a za xya x >0a y =0(5)1.2 求解旋转后的直角坐标值求解工作台旋转后的任意刀位点(x w ,y w ,z w )在机床坐标系OX YZ 中的坐标(X ,Y ,Z ),根据机床的运动顺序进行如下空间变换(1)将工件坐标系O w xyz 原点平移到机床坐标系OX YZ 原点O,平移距离为(x 0,y 0,z 0-H ),其中(x 0,y 0,z 0)为工件坐标系原点在机床坐标系中的坐标值,变换矩阵为T 1=1 0 0 00 1 0 00 0 1 0x 0 y 0 z 0-H 1(6)(2)工件绕B 倾斜轴旋转B 角,变换矩阵为0 0cos B 0 sin B 0-sin Bcos B 0 00 0 1 00 0 0 1∃1 0 0 00 cos45 sin45 00 -sin45 cos45 00 0 0 1(7)(3)工件绕Z 轴旋转C 角,变换矩阵为R 1=cos C sin C 0 0-sin C cos C 0 00 01 00 0 0 1(8)(4)将工件坐标系原点平移到新工件坐标系O 1x 1y 1z 1原点处的坐标变换矩阵为T 2= 1 0 0 0 0 1 0 0 01 0-x 0 -y 0 -z 0+H 1(9)因此,工作台旋转后的刀位点的齐次坐标[X ,Y ,Z ,1]表达式为[X ,Y,Z,1]=[x w ,y w ,z w ,1]T 1R 1R 2T 2(10)2 后置处理的T cl 语言编程实现Tcl 是&工具控制语言(tool control language)∋的缩写,是一种交互式解释性计算机语言,几乎可以在所有的平台上解释运行,有强大的功能和简单的语法,具有很强的可扩充性和可移植性.嵌入UG NX 系统中,通常用于CAM 中的后置处理程序和加工文档处理程序.应用Tcl 语言编制后处理程序主要开展2项工作:(1)完成事件定义文件的编写;(2)完成事件处理文件的编写.事件定义文件用来控制事件处理后输出的数据格式,事件处理文件用来控制加工过程中的每个事件的处理方式.为了快速搭建后置处理程序框架,可以通过NX/Post Builder 建立事件定义文件和事件处理文件的程序框架,根据实际情况,在程序框架中通过Tcl 语言,添加相应的用户化内容.2.1 编写子程序完成B 、C 角度和刀位点坐标计算 在事件处理文件框架中新建3个子程序为:77第1期 刘东杰:应用T CL 语言实现非正交五轴联动数控机床后置处理proc M OM before motion{};proc r otate c{c pos in pos out};proc rotate b{b pos in pos out}.通过3个子程序分别完成B、C旋转角度的计算、坐标变换矩阵和刀位点在新坐标系中的坐标计算.子程序proc MOM before motion{},T cl语言源代码示例(部分):(1)定义全局变量global mom tool ax is 定义刀轴矢量;global mom pos 定义基于机床坐标系下的运动坐标值;global mom prev pos定义前一个运动事件的坐标系;global mom motion event定义当前运动事件的类型;(((2)确定机床工作台状态及B、C旋转角度if{$tmpz=1}{ 机床主轴矢量垂直于工作台;set ud pos(b)0.0 B轴旋转角度为0;rotate c$ud pos(c)mom pos ud posrotate c$ud pos(c)mom pos arc center ud cpos ((上述程序段为子程序pro c M OM before motion 的部分程序段示例,由于篇幅关系不再展开叙述.通过T cl语言进行一系列事件的逻辑判断、数学计算,最终完成B、C旋转角度的计算、坐标变换矩阵和刀位点在新坐标系中的坐标计算.2.2 后置处理程序与UG/CAM系统的集成将定义好的事件处理文件和事件定义文件存储在相应的后置处理程序存放的根目录下,如:(E:\ Program F iles\U GS\NX3.0\M A CH\resour ce\postpro cessor).并在该根目录中找到template post.dat文件,打开该文件并对文件进行如下修改.DMU50V 后置处理器${UG II CAM PO ST DIR}DM U50V.tcl, ${UG II CA M PO ST DIR}DM U50V.def.通过上述编辑完成了后置处理程序与UG/ CAM系统的集成,用户通过UG/CAM系统直接对DM U50V机床后置处理进行调用.3 结 束 语以上通过结合非正交五轴联动数控机床(DMU50V)的结构特点,介绍了后置处理算法,并将该算法成功应用到Tcl语言编程中,实现了非正交五轴联动数控机床后置处理程序编制并已成功应用于工程实际中.后置处理作为CAD/CAM系统中的关键环节,决定了CAD/CAM软件的应用效果和复杂零件加工的质量、效率等.文中提出的机床运动学算法的推导对同类型设备和标准五轴联动数控机床的后置处理程序开发具有一定的参考价值.参考文献[1] 张磊.U G N X4后处理技术培训教程[M].北京:清华大学出版社,2007.[2] 李海泳,张森棠,赵明,等.U G N X数控加工技术[M].北京:清华大学出版社,2006.[3] 成群林,侯正全,宋健,等.特殊五坐标数控机床后置处理技术研究[J].航天制造技术,2007(6):20-22. [4] 葛振红,姚振强,赵国伟.非正交五轴联动数控机床后置处理算法[J].机械设计与研究,2006,22(2):79-81.[5] 丁勇,耿小强,陈刚.一种特殊结构的五轴数控机床的后置处理算法与软件实现[J].CA D/CA M与制造信息化,2005(1):77-78.(上接第59页)了DSP计算庞大数据的高效性和FPGA精于并行处理的优点,系统具有集成度高、存储量大、处理速度快和方便传输等特点.另外系统也有很好的通用性,不仅能够用于目标识别,还可实现压缩、分类等其他信息处理,具有广泛的应用前景.参考文献[1] 赵建平,李捍东.基于DSP的图像处理系统的应用研究[J].自动化技术与应用,2008,27(11):45-48. [2] 贾俊涛,张桂林.基于U SB2.0的图像传输系统的设计与实现[J].计算机工程与设计,2006,27(17):3239-3242.[3] 李方慧,王飞,何佩坤.T M S320C6000系列DSPs原理与应用[M].2版.北京:电子工业出版社,2003:1-2,9-11.[4] 谷延锋,刘颖,贾友华,等.基于光谱解译的高光谱图像奇异识别算法[J].红外与毫米波学报,2006,25(6):473-477.78 光 电 技 术 应 用 第25卷。
AC双转台五轴联动数控加工中心的后置处理

AC双转台五轴联动数控加工中心的后置处理摘要:数控加工技术已经成为现代制造业中不可或缺的一部分,它可以高效地完成各种零部件的加工任务,并且具有高精度、高效率的特点。
AC双转台五轴联动数控加工中心可以完成更加复杂的加工任务,在加工完成后还需要进行后置处理,以保证加工零件的质量和精度。
文章以AC双转台五轴联动数控加工中心为研究对象,研究其后置处理的可行性,以期为多轴设备提供有效保障。
关键字:双转台;五轴联动;后置处理前言在数控编程过程中,前置处理指的是刀位的轨迹计算过程。
基于相对运动这一原理,一般在工件坐标系当中来计算刀位的轨迹,无需将机床结构、指令的格式考虑进去,以使前置处理通用化,保证前后置处理能够各自负责相应的任务。
为了读取最终加工程序,就需要对前置处理得到的刀位数据进行转换,形成机床程序代码,这一过程就是后置处理。
在航空领域,AC双转台五轴联动数控加工中心的后置处理起着重要保障作用,本文主要以AC双转台五轴联动数控加工中心的后置处理展开探究。
1后置处理的概述1.1 概念后置处理属于数控加工和CAM系统间的桥梁,其主要任务就是对CAM软件生成的刀位轨迹进行转化,使其成为符合特定数控系统、机床结构的加工程序。
1.2 主要任务五轴联动数控加工中心的后置处理有着重要的任务,主要是结合机床的控制指令格式、运动结构等要求,对于前置处理所生成的刀位数据文件进行转变,使其成为机床各轴的运动数据,然后,依据控制指令的具体格式,将其进行转换,形成数控加工中心的加工程序。
具体而言,可以将后置处理的任务分为几下几点:①机床运动学转换五轴联动数控编程所生成的刀位数据,通常指的是刀具与工件坐标系相对的刀心具体位置、刀轴矢量数据。
在机床的运动转变下,其主要是依据实际运动结构,对刀位文件当中的数据信息进行转换,使其成为不同运动轴上的数据信息。
②非线性运动误差的校验非线性运动误差的校验是在CAM系统计算刀位数据时进行的,这个系统使用离散直线来近似工件轮廓。
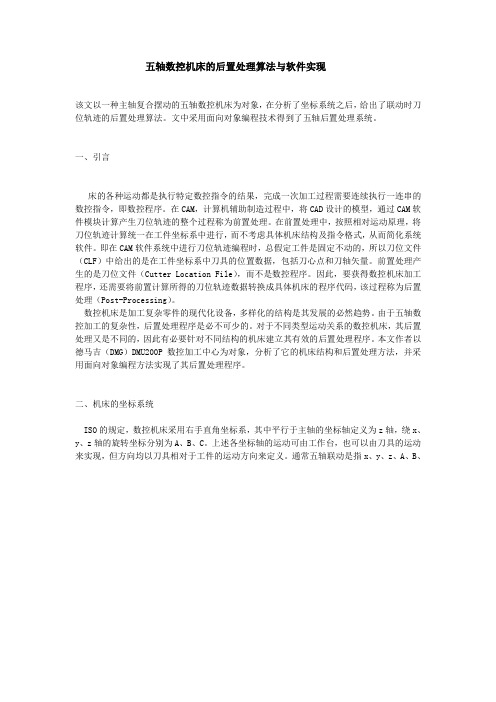
具有RTCP功能的五轴数控机床后置处理方法
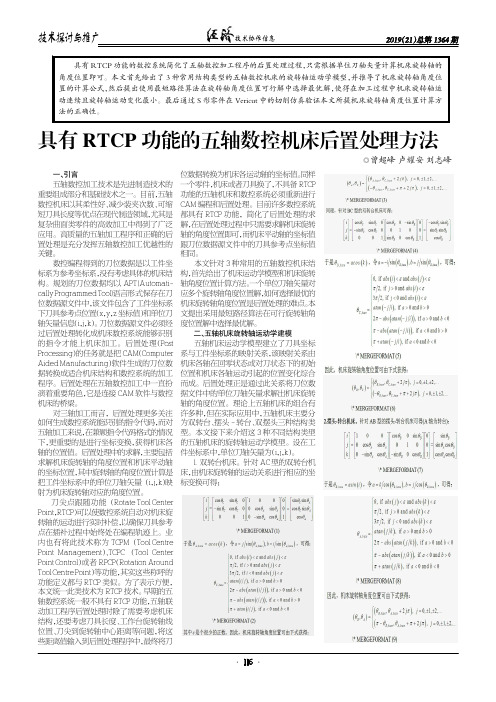
◎曾超峰卢耀安刘志峰具有RTCP功能的五轴数控机床后置处理方法一、引言五轴数控加工技术是先进制造技术的重要组成部分和基础技术之一。
目前,五轴数控机床以其柔性好、减少装夹次数、可缩短刀具长度等优点在现代制造领域,尤其是复杂曲面类零件的高效加工中得到了广泛应用。
高质量的五轴加工程序和正确的后置处理是充分发挥五轴数控加工优越性的关键。
数控编程得到的刀位数据是以工件坐标系为参考坐标系,没有考虑具体的机床结构。
规划的刀位数据均以APT(Automati-callyProgrammedTool)语言形式保存在刀位数据源文件中,该文件包含了工件坐标系下刀具参考点位置(x,y,z坐标值)和单位刀轴矢量信息(i,j,k)。
刀位数据源文件必须经过后置处理转化成机床数控系统能够识别的指令才能上机床加工。
后置处理(Post Processing)的任务就是把CAM(Computer Aided Manufacturing)软件生成的刀位数据转换成适合机床结构和数控系统的加工程序。
后置处理在五轴数控加工中一直扮演着重要角色,它是连接CAM软件与数控机床的桥梁。
对三轴加工而言,后置处理更多关注如何生成数控系统能识别的指令代码,而对五轴加工来说,在兼顾指令代码格式的情况下,更重要的是进行坐标变换,获得机床各轴的位置值。
后置处理中的求解,主要包括求解机床旋转轴的角度位置和机床平动轴的坐标位置,其中旋转轴的角度位置计算是把工件坐标系中的单位刀轴矢量(i,j,k)映射为机床旋转轴对应的角度位置。
刀尖点跟随功能(Rotate Tool Center Point,RTCP)可以使数控系统自动对机床旋转轴的运动进行实时补偿,以确保刀具参考点在插补过程中始终处在编程轨迹上。
业内也有将此技术称为TCPM(Tool Centre Point Management)、TCPC(Tool Center Point Control)或者RPCP(Rotation Around ToolCentrePoint)等功能,其实这些称呼的功能定义都与RTCP类似。
VERICUT五轴虚拟机床模型的开发及后处理验证

N ,无需 在 机 床 上 直 接 操 作 ,快 速 、安 全 、可 靠 , C
效 益更 明显 ,五 轴 加 工 中心按 照其 结 构 特 点 的 不 同 可分 为四 大类 :双摆 头 机 床 、摆 头及 转 台机 床 、垂
: 5 ) b 6
; j
r 加 参 。 冷 , ’ 堋 磊
C D/ A C P直甩 A C M/ AP
1 p l ain o AD/ AM ̄ AP p i t f C c o C C P
(一10 一 0 , 一10 ,视 图 方 向 H —IO进 行 观 7 , 30 5) S
中心 ,这些 机构 的相互关 系相 当重要 ,不 能出错 。 3 。构 建 虚 拟 机床 模 型
图1 五轴机床外观图
技 术 参 数 表
具 体 的 技 术 参 数
如 附表 。
根据上 述 的五 轴 机 床结 构关 系 就 可 以 构 建 机 床 模型 了 ,具 体步骤 如下 : ( ) 起始 操 作 选 取 菜 单 中 Mo e- o p n n 1 dl  ̄C m o e t
别 、更 正 引起 的碰撞 。
代 了传统 的切 削 实 验 部 件 方 式 ,优 化 数 控 程 序 的 切 削速 度 ,获得 更高 效率 。
一
般的 N C仿 真 软件 只 能 模 拟 2 、3轴 的数 控 车
床或 加工 中心 ,数 控 系 统 、设 备 型 号 非 常有 限 ,有 些无法 验 证 宏 指 令 ,更 不 用 说 四五 轴 的机 床 了 。而 四五轴 加 工 中 心 有 许 多 种 形 式 ,有 立 式 的 、有 卧式 的 ;有 A B轴 、B C轴 、C A轴 ;有 的 是 工 作 台 翻 转 、
五轴数控加工CAM及程序后置验证方法

e a c h h y b r i d h o r i z o n t a l o r v e r t i c a l 5 - a xi s M C a s a n e x a mp l e. t he a u t h o r d e e p l y i n v e s t i ga t e d a n d s u mma —
文章编号 : t O 0 1 —2 2 6 5 ( 2 0 1 3 ) 0 8— 0 0 9 9— 0 5
五轴 数 控 加 工 C A M及 程 序 后 置验 证 方法
王 准
( 安徽 工程 大 学 机械 与汽车 工程 学院 , 安徽 芜湖 2 4 1 0 0 0 )
摘要 : 五轴数控加工任务 中, 数控程序的设计 , 必须从 工艺 系统 角度 , 通盘考虑并借助 C A M 方法才能 完成 ; 而程序代码 的正确 与否, 还 需要 通过后 置验 证手段 , 才能确定。文章从 制造 系统层 面 , 以混合 型立 卧五 轴 加工 中心上 , 各 自加 工两种减速器下箱体零件 为例 , 全 面研 究并 总结 出五轴数控加 工 中, 利 用计算机辅 助
技术, 完成 从 工 艺 系统 设 计 准 备 到 最 终 数 控 加 工 验 证 工 作 的技 术 原 理 与 方 法 。 这 些 原 理 和 方 法 是 具 备 普 遍 性 和 实用 性 的 , 可 以被 五 轴 加 工 中心使 用 者借 鉴 , 以提 高 其 生 产过 程 中 的质 量 、 效 率 与成 本 目标 。 关键 词 : 五轴加 工数控 程序 ; 工艺 系统 ; 工装设 计 ; 后 置 验 证 中 图分类 号 : T P 3 9 1 文献标 识码 : A
五轴数控机床的后置处理算法与软件实现
五轴数控机床的后置处理算法与软件实现该文以一种主轴复合摆动的五轴数控机床为对象,在分析了坐标系统之后,给出了联动时刀位轨迹的后置处理算法。
文中采用面向对象编程技术得到了五轴后置处理系统。
一、引言床的各种运动都是执行特定数控指令的结果,完成一次加工过程需要连续执行一连串的数控指令,即数控程序。
在CAM,计算机辅助制造过程中,将CAD设计的模型,通过CAM软件模块计算产生刀位轨迹的整个过程称为前置处理。
在前置处理中,按照相对运动原理,将刀位轨迹计算统一在工件坐标系中进行,而不考虑具体机床结构及指令格式,从而简化系统软件。
即在CAM软件系统中进行刀位轨迹编程时,总假定工件是固定不动的,所以刀位文件(CLF)中给出的是在工件坐标系中刀具的位置数据,包括刀心点和刀轴矢量。
前置处理产生的是刀位文件(Cutter Location File),而不是数控程序。
因此,要获得数控机床加工程序,还需要将前置计算所得的刀位轨迹数据转换成具体机床的程序代码,该过程称为后置处理(Post-Processing)。
数控机床是加工复杂零件的现代化设备,多样化的结构是其发展的必然趋势。
由于五轴数控加工的复杂性,后置处理程序是必不可少的。
对于不同类型运动关系的数控机床,其后置处理又是不同的,因此有必要针对不同结构的机床建立其有效的后置处理程序。
本文作者以德马吉(DMG)DMU200P数控加工中心为对象,分析了它的机床结构和后置处理方法,并采用面向对象编程方法实现了其后置处理程序。
二、机床的坐标系统ISO的规定,数控机床采用右手直角坐标系,其中平行于主轴的坐标轴定义为z轴,绕x、y、z轴的旋转坐标分别为A、B、C。
上述各坐标轴的运动可由工作台,也可以由刀具的运动来实现,但方向均以刀具相对于工件的运动方向来定义。
通常五轴联动是指x、y、z、A、B、C中任意5个坐标的线性插补运动。
图1 DMU200P机床运动坐标系如图1所示的是DMU200P机床的运动坐标系。
双摆头五轴联动加工中心后置处理仿真与优化
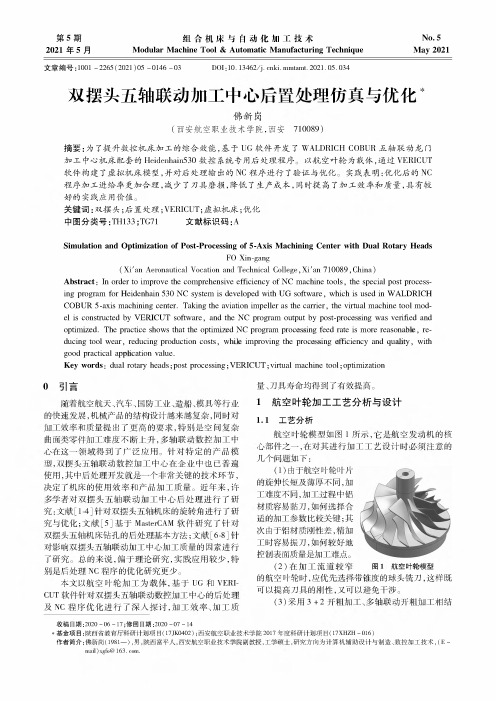
组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing TechinnueNo.5May 2021第5期2021年5月文章编号 #1001 -2265(2021)05 -0146 -03DOI : 10.13462/j. cnki. mmtamt. 2021.05.034双摆头五轴联动加工中理仿真与优化**收稿日期:2020-06 - 17 ;修回日期:2020-07 -14*基金项目:科研计划(17JK0402);西安航空职业技术学院2017年度科研计划 (17XHZH-016)作者简介:(1981—),男,,西安航空职业技术学 授,工学 ,研究方向为计算机辅助设计与制造、数控加工技术,(E-mail)xgfo@ 163. com.佛新岗(西安航空职业技术学院,西安710089%摘要:为了提升数控机床加工的综合效能,基于UG 软件开发了 WALDRIEH COBUR 五轴联动龙门加工中心机床配套的Heidenhain530数控 用后处理程序。
以航空叶轮为载体,通过VERICUT 软件构建了虚拟机床模型,并对后处理输出的NC 程序进行了验证 化。
实 :优化后的NC 程序加工进 更加合理,减少了刀具磨损,降低了 成本,同时提高了加工 和质量,具有较的实践应用价值。
关键词:双摆头;后置处理;VERIUT ;虚拟机床;优化中图分类号:TH133 :TG71 文献标识码:ASimulation and Optimization of Post-Processing of 5-Axis Machining Center with Dual Rotary HeadsFO Xin-gang(Xi'an Aeronautical Vocation and Technical Co/eye , Xi'an 710089 , China )Abstrad;: In order W improve We comprehensive efficiency of NC machine tools , the special post proces s ing program for Heidenhain 530 NC system is developed with UG software , which is used in WALDRICH COBUR 5 -axis machining center. Taking the aviation imp —ler as We carrier , the virWal machine tool mod- e3isconstructed by VERSCUTsoftware , and the NC program outputby post-proce s ing wasverified and optimi eed. The practice shows that the optimi eed NCprogram proce s ing feed rateismorereasonab e , re ducing too3wear , reducing production costs , whieimproving theproce s ing e f iciency and quaity , with good practica3app ication va3ue.Key wors : dual rotary heads ; post processing ; VERICUT ; virtual machine tool ; optimization0引言着航空航天、汽车、国防工业、 、模具等行业的快速 ,机 产品的 设计越来越复杂,同 对工效率和质量提出了 的 ,特别是空间复杂曲面 工难度不 , 联数控加工中在这一 得到了广泛应用。
【研究】五轴加工中心的数控编程后置处理研究

【关键字】研究1.绪论1.1数控编程后置处理技术数控加工技术是在数控机床上依靠NC程序进行零件加工的自动化加工方法,具有高效率、高精度与高柔性的特点。
数控加工技术可有效解决复杂、精密和小批多变零件的加工问题,能够充分适应现代化生产的需要。
它是CAD/CAM的加工执行单元,是现代自动化、柔性化及数字化生产加工技术的基础与关键技术。
随着航空、汽车、造船和模具制造等工业的发展,越来越多的复杂曲面应用于工程之中。
包含复杂曲面的大型零件和模具的制造越来越离不开数控机床和数控加工技术。
同时,由于对产品质量和生产效率要求的不断提高,对复杂曲面加工的数控机床性能和相应的数控加工技术也提出了更高的要求。
五坐标联动数控技术是数控技术中难度最大,应用范围最广的技术之一,它集计算机控制、高性能伺服驱动和精密加工技术于一体。
目前,多采用五坐标联动的数控加工方法来完成复杂曲面的加工。
飞机和航空发动机的复杂结构件、船用螺旋桨、泵类叶轮等都是五坐标加工的典型例子。
后置处理技术是随着数控技术、CAD/CAM技术的发展而发展起来的。
最早的数控程序都是手工编制,不存在后置处理问题。
近年来,自动编程CAD/CAM软件取代了手工编程,它具有编程速度快、精度高、稳定性好、更改方便和易于管理等特点,但是自动编程经过刀具轨迹计算产生的刀位数据文件不能被机床识别,需要设法把刀位数据文件转换成数控指令代码,通过通信的方式输入数控机床的数控系统,才能进行零件的数控加工[1]。
因此,要把前置处理产生的刀位数据文件、加工工艺参数与特定的机床特性文件、定义文件相结合,生成指定数控加工设备能够识别的数控加工程序,该过程称为后置处理(post-processing)[2]。
后置处理程序将CAM系统通过机床的CNC系统与机床数控加工紧密结合起来。
随着高档数控加工中心、特殊结构数控机床的不断出现,为其配置和开发合适的后置处理器愈显重要,这对提高数控编程效率、扩大CAD/CAM一体化技术的应用范围具有重要的工程应用价值和实际意义,目前后置处理技术已经成为CAD/CAM技术领域的一个研究热点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
章鸿 (四川信息职业技术学院,四川 广 元 628017)
摘 要 :针对常见的三大类型正交结构的五轴机床,根据齐次坐标变换和运动链关系,推导建立了双转台
中图分类号:TH16
文 献 标 识 码 :B
DOI:10.19287/ki.1005-2402. 2019. 04. 036
Kinematics modeling and post-processing verification of five-axis machine tool
Z H A N G Hong (Sichuan Vocational College of Information Technology, Guangyuan 628017, C H N )
* 教 育 部 教 育 管 理 信 息 中 心 (JYB- EMIC- 1 5 0 1 1 ) ;四 川 省 教 育 厅 资 助 资 金 (17ZB0387) • 180 •
2 0 1 9 年第4 期
1 机床运动学建模
正 交 类 型 的 五 轴 机 床 主 要 划 分 为 双 转 台 类 型 ,摆
现 代 五 轴 机 床 的 发 展 趋 势 ,除 了 由 运 动 学 方 程 建 立 后 置 处 理 程 序 算 法 ,还 需 要 考 虑 在 后 置 处 理 开 发 过 程 中 旋 转 轴 的 转 角 问 题 ,以 避 免 奇 异 性 [7_1()]。根 据 正 交 结 构 的 五 轴 机 床 的 分 类 ,将 五 轴 机 床 主 要 分 为 三 大 类 ,分别建立其运动学方程,并推导刀位点和刀具矢量 的坐标转换关系。基 于 U G - p o s t 开发 了 后 处 理 程 序 , 在 U G 环境中生成了刀具路径并完成了仿真,最后在 一 台 型 五 轴 加 工 中 心 上 实 际 加 工 ,验证了运动学 模型及后处理算法程序的正确性。
Abstract :According to the homogeneous coordinate transformation and the kinematic chain relation, the kinematics model of the double table-tilting five-axis machine (T A T C ) is established, so as to the spindle-tilting machine (S C S A ) and the hybrid-type machine (S A T C ) tool is deduced for the common orthogonal structure.According to the inverse matrix equation, the range of rotation angle of A and C axis is deter mined.Based on U G -post, a post-processor is developed for machining in this paper.Within U G envi ronment, the 5-axis milling tool path and the actual machining of a concave spherical surface part on an AC five-axis machine verifies the correctness of the post-processing algorithm.
析 ,缺少实际加工。文 献 [5]用齐次坐标变换和正向 运动学分析得到通用五轴机床结构的形状创成函数, 通过形状创成函数得到五轴数控数据完整的表达式。 相 对 而 言 ,此模型的矩阵函数晦涩难懂。文 献 [ 6 ] 以
型 五 轴 机 床 运 动 方 程 为 例 ,探讨后置处理误差补 偿 算 法 ,融 入 到 后 置 处 理 开 发 中 ,考虑的误差补偿类 型比较全面。
Keywords:five-axis machine;kinematics modeling;post-processing;U G / N X ;tool path
五 轴 联 动 机 床 在 航 空 发 动 机 叶 轮 ,螺 旋 桨 叶 片 整 体 铣 削 ,复 杂 曲 面 加 工 ,模具开发等重要领域发挥着 不可替代的优势,因 其 特 殊 的 机 床 结 构 ,灵活的工作 空间和对刀具姿态的控制,使 其 在 智 能 制 造 、产品定 制和军工生产占有核心地位。仅正交类型五轴机床 有 十 几 种 结 构 形 式 ,每 种 机 床 结 构 的 加 工 特 点 各 不 相 同 ,而后置处理与机床的运动学方程有着直接的映射 关 系 [1]。
型 、摆头转台型、双摆头型五轴机床的运动学模型。根据矩ost开发了后置处理器,在 U G 环境中以凹球面为例,生 成 5 轴 铣 削 刀 路 ,
型五轴机床的实际加工验证了后置处理算法的正确性和有效性。
关 键 词 :五轴机床;运动学建模;后置处理;UG/ N X ;刀路轨迹
文献[2]重点研究了双转台五轴机床坐标系和 工件坐标系的转换方程,建 立 了 机 床 运 动 学 方 程 ,重 点 关 注 后 处 理 过 程 的 转 角 和 坐 标 转 换 公 式 ,其 开 发 了 后 处 理程序,但 缺 少 实际加工验证。文 献 [3]主要针 对 一 种 非 正 交 结 构 的 转 台 五 轴 机 床 ,研究了机床 的 运 动 学 方 程 ,在 V E R I C U T 软件环境中完成了仿真 验 证 ,对 运 动 学 建 模 的 原 则 方 法 有 启 发 作 用 。文献 [4]研究了机床坐标运动变换,同样是完成了仿真分*