五轴数控机床通用坐标运动变换及求解方法的研究
五轴机床里面的坐标变换原理

五轴机床里面的坐标变换原理五轴机床在现代制造业中扮演着重要的角色,它能够实现复杂零件的高效加工。
而要实现精确的加工,就需要对五轴机床中的坐标变换原理有深入的理解。
本文将从深度和广度两个标准出发,对五轴机床中的坐标变换原理进行评估和探讨,以帮助读者更全面、深刻地理解这一概念。
一、坐标系介绍在探讨坐标变换原理之前,首先需要介绍一下坐标系的概念。
在机床的加工过程中,我们需要确定三维空间中各个点的位置。
为了方便表示和计算,我们引入了坐标系的概念。
常用的坐标系有世界坐标系(或零点坐标系)、机床坐标系、工件坐标系和刀具坐标系等。
二、五轴机床的坐标变换原理5轴机床通过机械的旋转和移动,可以实现复杂零件的加工。
为了控制机器的运动,需要进行坐标变换。
五轴机床中的坐标变换原理主要包括以下几个方面:1. 机械结构5轴机床通常由三线性轴和两旋转轴组成,每个轴都涉及到坐标变换。
对于线性轴,可以通过平移运动改变刀具或工件的位置;而旋转轴则可以改变刀具或工件的方向。
机械结构的变化需要通过坐标变换来进行控制。
2. 世界坐标系和机床坐标系的转换五轴机床中,通常会存在世界坐标系和机床坐标系之间的转换。
世界坐标系是一个固定的全局坐标系,用于描述工件在机床上的位置和姿态。
而机床坐标系是相对于机床本身而言的坐标系,用于描述机床上各个部件的位置和运动。
3. 工件坐标系和刀具坐标系的变换为了更好地控制刀具相对于工件的位置和姿态,五轴机床中常常需要进行工件坐标系和刀具坐标系的变换。
工件坐标系是以工件为基准的坐标系,用于描述工件上各个点的位置和姿态;而刀具坐标系是以刀具为基准的坐标系,用于描述刀具上各个点的位置和姿态。
4. 坐标变换矩阵为了实现坐标变换,可以使用坐标变换矩阵来描述不同坐标系之间的转换关系。
坐标变换矩阵通常由旋转矩阵和平移矩阵组成,其中旋转矩阵用于描述旋转变换,平移矩阵用于描述平移变换。
通过将不同的坐标变换矩阵进行组合,可以实现复杂的坐标变换。
双摆头型五轴数控机床的坐标变换关系研究
计与机床驱动完成数控加工的桥梁,也是机床能否按照
设计人员的意图加工出符合生产要求产品的关键。
一般
来 说 ,将
刀具路径
规划及刀
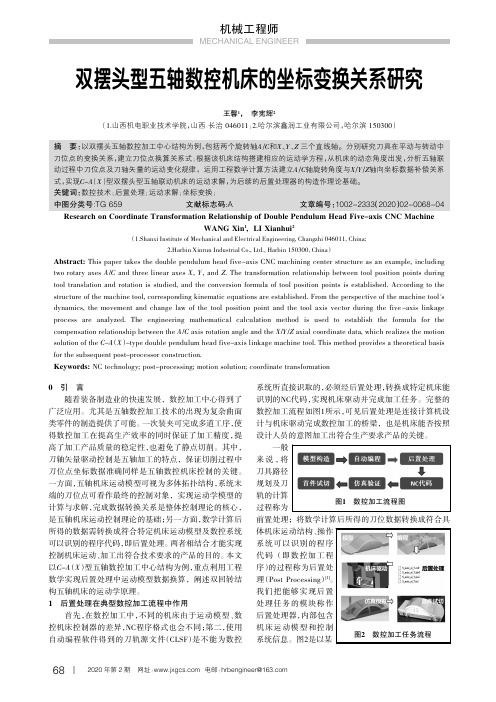
轨的计算 过程称为
图1 数控加工流程图
前置处理;将数学计算后所得的刀位数据转换成符合具
体机床运动结构、操作
系统可以识别的程序
代码 (即数控加工 程
序)的过程称为后置处
理(Post Processing)[1]。
process are analyzed. The engineering mathematical calculation method is used to establish the formula for the
compensation relationship between the A/C axis rotation data, which realizes the motion
solution of the C-A(X)-type double pendulum head five-axis linkage machine tool. This method provides a theoretical basis
for the subsequent post-processor construction.
2.Harbin Xinrun Industrial Co., Ltd., Harbin 150300, China)
Abstract: This paper takes the double pendulum head five-axis CNC machining center structure as an example, including
五轴加工中心加工坐标转换

從機器軸座標轉換到工件座標稱正轉換
Xw = Zm sin(Cm )sin(Am ) − Ym sin(Cm ) cos(Am ) − Xm cos(Cm ) − Xwo
Yw = Zm cos(Cm ) sin(Am ) − Ym cos(Cm ) cos(Am ) + Xm sin(Cm ) − Ywo
=
⎢⎢sinθc ⎢0
cosθc 0
0 0⎥⎥ 1 0⎥
⎢ ⎣
0
0 0 1⎥⎦
⎡1
c Tb
=
⎢⎢0 ⎢0
⎢⎣0
⎡1
b Tw
=
⎢⎢0 ⎢0
⎢⎣0
0 0 0⎤
10
0
⎥ ⎥
0 1 Z3⎥
00
1
⎥ ⎦
0 0 Xwo⎤
1
0
Ywo
⎥ ⎥
0 0
1 0
Zwo 1
⎥ ⎥ ⎦
五軸與UG25
第二章 五軸加工座標轉換
五軸工具機座標轉換
Am = cos−1(Kw)
(cos Cm,sin Cm ) = ( j/ sin Am, i / sin Am )
第一解
第二解
(Am , Cm )
(−Am,Cm + 180ο)
五軸與UG28
第二章 五軸加工座標轉換
逆轉換(Backward Tans.)
Xm = cos θc(Xw + Xwo) + sin θc(Yw + Ywo)
⎢− ⎢ ⎣
cos
θa
sin
θb
cos θc 0
+
sin
θa
sin
θc
cos θa sin θb sin θc + sin θa cos θc 0
5轴CNC机床空间运动学研究

TR = [ sinΒ0cos C0 , sinΒ0sin C0 ,cosB0 ,0 ] T
(4)
如前面所述 , WCS 系与 RCS 系的相对位置关系在整个加工
过程中保持不变且通过测量可以确定出。不妨设 RCS 系 XR 、YR 、
ZR 轴单位矢量 iR , jR , kR 以及原点 R 在 WCS 系下分别为 ( iR) w ,
如图 1 所示 ,数控机床空间运动是由三
个平动坐标 X 、Y、Z 和分别绕 XYZ 轴旋转的
三个转动坐标 A 、B 、C 组成的 。根据 5 轴联动
数控机床具体的结构形式 , 运动坐标 X ( A) 、
Y ( B) 、Z ( C) 可分别由刀具或固定工件的工 图 1 机 床 运
作台的平动 (转动) 来实现 。常见的 5 轴 CNC
3 w
0
0
0
1
·24 ·
图 4 刀轴方位固定 - 工作台平移回转式机床各坐标系建立
五轴机床里面的坐标变换原理

五轴机床及其应用领域五轴机床是一种具有五个工作轴的数控机床,分别为X、Y、Z三个线性轴和A、C 两个旋转轴。
其中,X、Y、Z轴分别代表机床的三个线性方向,而A、C轴则分别代表机床绕X轴和Z轴旋转的方向。
五轴机床具有较高的加工精度和加工效率,广泛应用于航空航天、汽车、模具等领域。
五轴机床的坐标变换原理是指通过一系列的坐标变换,将加工物体在机床坐标系下的坐标转换为工件在机床工作空间内的坐标,以实现精确的切削加工。
坐标变换原理是五轴机床能够实现复杂曲面加工的基础,下面将详细介绍与坐标变换原理相关的基本原理。
坐标系及坐标变换在五轴机床中,通常使用三个坐标系来描述加工物体的位置和姿态。
分别为机床坐标系(MCS)、工件坐标系(WCS)和刀具坐标系(TCS)。
其中,MCS是机床的固定坐标系,WCS是工件的坐标系,而TCS是刀具的坐标系。
机床坐标系(MCS)是机床固定不动的坐标系,由机床制造商定义。
它通常以机床的主轴中心为原点,X轴指向机床的前方,Y轴指向机床的左侧,Z轴指向机床的上方。
工件坐标系(WCS)是以被加工工件为参考的坐标系,它的原点和轴向可以根据加工需要进行定义。
工件坐标系的选择应能够最大程度地简化加工过程,使得刀具的运动轨迹能够与工件的几何形状相匹配。
刀具坐标系(TCS)是以刀具为参考的坐标系,它的原点和轴向通常与机床坐标系相同。
刀具坐标系的选择应能够方便地描述刀具的位置和姿态,并且与工件坐标系之间的转换关系简单明了。
坐标变换是将工件坐标系(WCS)中的坐标转换为机床坐标系(MCS)中的坐标的过程。
坐标变换通常包括平移变换和旋转变换两个部分。
平移变换将工件坐标系的原点从工件的某一特定点移动到机床坐标系的原点,而旋转变换则是将工件坐标系沿着某一特定轴旋转到与机床坐标系重合。
平移变换平移变换是将工件坐标系(WCS)中的坐标转换为机床坐标系(MCS)中的坐标的一种基本变换方式。
平移变换通过将工件坐标系的原点从工件的某一特定点移动到机床坐标系的原点来实现。
五轴数控系统旋转运动学通用建模及处理方法

五轴数控系统旋转运动学通用建模及处理方法
段舒文;林浒;郑飂默;孙树杰
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2014(000)008
【摘要】针对五轴数控机床种类繁多、运动学构成复杂、运动学模型求解不便的
问题,分析了三大类五轴数控机床旋转运动特征,结合运动学原理,建立其各自的运动学模型,进而抽象出五轴数控机床旋转运动的通用模型。
基于旋转矩阵的正交特性,对通用模型进行变换,最后使用Gauss消元法来求解模型。
对于多解的情况,给出一种选择最优解的策略。
最后通过仿真验证了处理方法的可行性和高效性。
【总页数】3页(P53-55)
【作者】段舒文;林浒;郑飂默;孙树杰
【作者单位】中国科学院研究生院,北京 100039; 中国科学院沈阳计算技术研究所,沈阳 110168;中国科学院沈阳计算技术研究所,沈阳 110168;中国科学院沈阳计算技术研究所,沈阳 110168;中国科学院研究生院,北京 100039; 中国科学
院沈阳计算技术研究所,沈阳 110168
【正文语种】中文
【中图分类】TH166;TG659
【相关文献】
1.基于通用运动学的BC型双转台五轴数控机床后置处理 [J], 陈爱华
2.倾斜旋转轴五轴机床运动学模型的设计 [J], 郑飂默;林浒;卜霄菲
3.五轴联动机床的通用运动学模型分析 [J], 葛卫京;杜东方;
4.五轴机床分类运动学建模及后置处理验证 [J], 章鸿
5.五轴数控系统旋转轴快速平滑插补控制策略 [J], 郑飂默;林浒;盖荣丽;王峰;张晓辉
因版权原因,仅展示原文概要,查看原文内容请购买。
《数控系统五轴联动轨迹平滑技术研究与应用》

《数控系统五轴联动轨迹平滑技术研究与应用》一、引言随着制造业的快速发展,数控机床在工业生产中扮演着越来越重要的角色。
五轴联动数控机床以其高精度、高效率、高灵活性的特点,广泛应用于航空、汽车、模具等制造领域。
然而,五轴联动数控机床在实现高精度加工的同时,也面临着轨迹不平滑、振动、过切等问题。
因此,研究五轴联动轨迹平滑技术,对于提高数控机床的加工精度、加工效率和产品质量具有重要意义。
二、五轴联动数控系统概述五轴联动数控系统是指通过五个坐标轴(通常为X、Y、Z、A、C轴)的联动控制,实现对工件的复杂曲面加工。
五轴联动数控系统的核心是数控系统软件,其中包括轨迹规划、插补算法、运动控制等关键技术。
三、五轴联动轨迹平滑技术的研究1. 轨迹规划算法研究轨迹规划是五轴联动数控加工的关键技术之一。
为了实现轨迹平滑,需要采用合理的轨迹规划算法。
目前,常用的轨迹规划算法包括:插值法、逼近法、最优法等。
其中,插值法具有较高的平滑性和精度,成为常用的轨迹规划方法。
2. 插补算法研究插补算法是五轴联动数控系统中的重要技术之一。
它通过计算每个中间点的坐标值,实现工件与刀具之间的精确运动。
为了实现轨迹平滑,需要采用高精度的插补算法。
目前,常用的插补算法包括:直线插补、圆弧插补、NURBS插补等。
其中,NURBS插补算法具有较高的精度和灵活性,能够满足复杂曲面加工的需求。
3. 运动控制技术研究运动控制技术是五轴联动数控系统的核心技术之一。
为了提高轨迹平滑性,需要采用高精度的运动控制技术。
目前,常用的运动控制技术包括:PID控制、前馈控制、模糊控制等。
这些控制技术可以根据不同的加工需求和工况条件,实现精确的运动控制和轨迹跟踪。
四、五轴联动轨迹平滑技术的应用五轴联动轨迹平滑技术在制造业中具有广泛的应用。
它可以应用于航空、汽车、模具等制造领域,实现对复杂曲面的高精度加工。
通过采用合理的轨迹规划算法、高精度的插补算法和高精度的运动控制技术,可以提高加工精度、加工效率和产品质量。
五轴联动数控机床的设计与研究
五轴联动数控机床的设计与研究随着机械制造业的发展,五轴联动数控机床已经成为了工业制造中不可或缺的一部分。
这种机床具有越来越广泛的应用前景,可以满足复杂薄壁零件的加工需求。
本文将从设计和研究两个方面介绍五轴联动数控机床的相关内容。
一、五轴联动数控机床的设计五轴联动数控机床是一种能够及时调整工作坐标系的机器,其中螺旋插补系统控制器的主轴是一种独特的五轴联动系统。
设计一个五轴联动数控机床需要考虑以下主要因素:1、传动系统传动系统是机床中一项非常重要的部分,直接影响到机床的性能。
在五轴机床中,采用齿轮传动和链传动的方法。
齿轮传动比链传动更加稳定、准确、耐用,一些精密机床也会使用直接驱动技术。
2、处理器和控制器五轴数控机床的处理器系统需要能够准确执行各种计算和运算任务,以便实现高度的控制精度和精准度。
同时,相关的控制器也需要能够实现高速的数据传输、控制和确保稳定性。
3、机械结构机械结构是机床中另一个非常重要的部分,通常采用刚性框架、机械手臂和伺服电机来实现五轴联动机床的稳定结构。
刚性框架具有高度的刚度和精度,可以保证零件的加工质量。
机械手臂则可以支持刀具运动,伺服电机则可以对刀具进行实时控制。
4、人机交互界面五轴联动数控机床需要有直观、易于操作的人机交互界面。
机床操作人员可以通过交互界面轻松调整五轴联动系数和各个轴的参数。
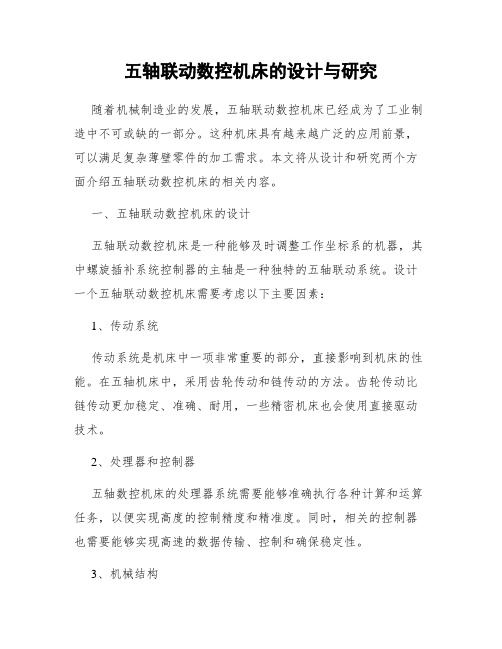
二、五轴联动数控机床的研究五轴联动数控机床的研究领域非常广泛,主要涉及以下方面:1、模型构建实现五轴联动的机床模型需要建立一个全球统一的数学模型,考虑到机床结构、动力和切削力等系数。
在五轴联动加工过程中,所有的轴向变量的运动都是依靠模型来进行研究和实践的。
2、刀路规划刀路规划在机床加工中是一个非常重要的环节,它直接影响到零件加工的质量。
在五轴联动中,刀路规划必须考虑到机床的轴向变量以及工件的加工要求。
为了提高零件的加工质量和加工效率,研究人员需要探索出一种先进的刀路规划算法。
3、控制技术五轴联动数控机床控制技术是这个领域的重点研究,它主要涉及到如何实现高精度控制和高速运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
o n t rt f ra y o he ype f5 xs m a h n o . s o a c i e t o1 i Ke r y wo ds:fv - xsN C c ne t os Po tpr c s o ;m o in c n e so i ea i ma hi o l; s - o e s r to o v r in;kn m a ism o a ie tc d l
a y n ih a 2 0 0,C ia n a gSc u n 6 1 1 hn )
Absr c t a t:The df c t fpos- o e s ri a i C a hii gi o in c n e so fm a hie c o ’ if ul o tpr c s o n 5-xsN i y m c n sm to o v r in o c n o r n dnae By a i g 5 a i C ma h e t o ih u lt r t b e s on rt x mpl,t s pa r d d c s i t . tk - xs N n c i o lw t d a u n a l a c ce e e a n e hi pe e u e ta so ma ina o e o he u t r lc to c o a d t nt s d o kne tc o c a im . r n f r to lm d lf r t c te o ai n ve t r n is poi s ba e n i ma is f me h n s
摘要 : 五轴数 控加 工后 置处理 的难点是 机床 坐标运 动 变换 ; 文章 以双转 台机 床 为例 , 用机构 运动 学 利
原 理 , 导 出 了 刀位 矢 量 及 刀 位 点 运 动 变换 模 型 ; 型 方 程 可 以 通 过 混 合 编 程 方 法 求 解 , 转 角 通 过 推 模 旋
最 短路径 法优化 选择 ; 过仿 真分析 对 该 算法进 行 了验 证 ; 际计算 结 果表 明所 提 出方 法是 正确 可 通 实
行 的而且适 用 于其他任何 类型 的五轴 机床 。
关 键 词 : 轴 数 控 机 床 ; 置 处 理 ; 动 变换 ; 动 学模 型 五 后 运 运
中 图分 类 号 : P 9 . 3 T 3 1 7 文 献 标 识 码 : A
ss i .The a t a a c lt g r s t n i a e t a h o s d m e h d i o r c n e s b e a d i u t b e c u lc l u a i e ul i d c t h t t e pr po e t o s c r e t a d f a i l , n s s i l n s a
M d le u to a b s l d by o e q a i n c n e o ve hy rd pr g a mi g n he n l o o a i n c n be o i i e b i o rm n ,a d t a g e f r t to a pt z d by m
数 据文件 , 其参考 坐标 系是工 件 坐标 系 , 而不 考 虑 机
系 , , 刀具坐 标 系 , 个 坐 标 系 皆与 机 床坐 0 X YZ 为 各
O 引 言
五 轴 联 动 数 控 加 工 需 要 通 过 前 置 处 理 生 成 刀 位
运 动 副 在 初 始 状 态 下 的 位 置 关 系 及 运 动 链 构 成 示 意 图。其 中 0 X Z 为 工 件 坐 标 系 , X YZ 0, 1 。为 C 转 动 副 节 点 坐 标 系 , : 2 : A 转 动 副 节 点 坐 标 0X YZ 为
L n — io HE a g IYo g qa ,C N Qin ,CHE o gxa g N Y n —in ( c o lo n fcuigS in ea dEn ie r g,S uh etUnv ri fS in e a d T c n lg ,Mi S h o fMa ua tr ce c n gn ei n n o tw s iest o ce c n e h ooy y —
・
设 计 与研 究 ・
组合机床与自 动化加工技术
文 章 编 号 :0 1—2 6 2 1 1 10 2 5( 0 0) 0—0 0 0 4一O 4
五 轴 数控 机床 通 用 坐标 运 动 变换 及 求解 方法 的研 究 术
李永 桥 , 陈强 , 永祥 谌
( 南 科 技 大 学 制 造 科 学 与工 程 学 院 , 西 四川 绵 阳 6 1 1 ) 2 0 0
s o t spa h m e h d. e v l iy a d u e un s ft e ag rt h re t — t o Th ai t n s f le s o h lo i t d hm r o i m e y t e sm ua in a ay’ a e c nf r d b h i lto n l
Re e c n G e e a o o nv r i n o o r n t n M e ho o - x sN C a h n s s ar h o n r lM r n Co e so fC o di a e a d i t d f r 5 a i M c ie