数控机床附件铣头坐标转换和CYCLE800的应用复习课程
数控铣床实训教案——坐标变换编程

数控铣床实训教案——坐标变换编程一、教学目标1. 理解数控铣床坐标变换编程的基本概念。
2. 学会使用数控铣床进行坐标变换编程操作。
3. 掌握坐标变换编程在实际加工中的应用。
二、教学内容1. 数控铣床坐标变换编程概述坐标变换编程的定义坐标变换编程的作用2. 坐标变换类型平移变换旋转变换缩放变换3. 坐标变换编程操作步骤输入坐标变换参数编写坐标变换程序执行坐标变换操作4. 坐标变换编程实例简单零件的坐标变换编程复杂零件的坐标变换编程三、教学方法1. 理论讲解:通过PPT、教材等资料,讲解数控铣床坐标变换编程的基本概念、坐标变换类型及操作步骤。
2. 实操演示:教师在数控铣床上进行坐标变换编程操作,学生观看并学习。
3. 学生实操:学生分组进行数控铣床操作,实践坐标变换编程,教师巡回指导。
4. 案例分析:分析实际加工中的坐标变换编程案例,提高学生应用能力。
四、教学评价1. 课堂提问:检查学生对数控铣床坐标变换编程的理解程度。
2. 实操考核:评估学生在数控铣床上的操作熟练程度及坐标变换编程能力。
3. 案例分析报告:评估学生对坐标变换编程在实际加工中的应用能力。
五、教学资源1. PPT、教材等教学资料。
2. 数控铣床及其操作设备。
3. 坐标变换编程实例零件图。
4. 编程软件及相关工具。
教案编写完毕,仅供参考。
如有需要,请根据实际情况进行调整。
六、教学过程1. 课前准备:检查数控铣床设备及工具,确保正常运行。
2. 课堂讲解:讲解坐标变换编程的基本概念、类型及操作步骤。
3. 实操演示:教师在数控铣床上进行坐标变换编程操作,展示操作过程。
4. 学生实操:学生分组进行数控铣床操作,实践坐标变换编程。
5. 案例分析:分析实际加工中的坐标变换编程案例,讨论操作技巧。
6. 课堂总结:回顾本节课所学内容,解答学生疑问。
七、教学反思1. 教师课后总结:反思教学过程中的优点和不足,提出改进措施。
2. 学生反馈:收集学生对教学内容的反馈,了解掌握程度。
数控机床的坐标系及相关点PPT课件

2021/3/12
12
数控机床的坐标系及相关点
七、对刀
在数控加工中,工件坐标系确定后,还要确定刀具的刀 位点在工件坐标系中的位置。即常说的对刀问题。数控机 床上,目前,常用的对刀方法为手动试切对刀。
X轴坐标的确定:
(1)没有回转刀具或工件的机床上,X轴平行于主要切削 方向且以该方向为正方向。
(2)在回转工件的机床上,X方向是径向的且平行于横向 滑座,正方向为刀具离开工件回转中心的方向。
3)在回转刀具的机床上:若Z坐标水平,由刀具主轴向工 件看,X坐标正方向指向右方;若Z坐标垂直,由刀具主 轴向立柱看,X坐标正向指向右方。 Y轴坐标方向由右手笛卡尔坐标确定。
数控机床的坐标系及相关 点
电气系 邓利红
2021/3/12
1
数控机床的坐标系及相关点
一、数控机床坐标系规定
数控坐标系是以刀具相对静止工件运动 为原则,数控机床坐标系采用的是右手笛 卡尔直角坐标系。
机床坐标系是机床固有的坐标系,机 床坐标系的原点称为机 床原点或机床零点。 在机床经过设计、制造和调整后,这个原 点 便被确定下来,它是固定的点。
2021/3/12
10
数控机床的坐标系及相关点
五、刀架相关点:
从机械意义上说,所谓寻找机床参考点,就使
刀架相关点与机床参考点重合,从而使数控系统 得知刀架相关点在机床坐标系中的坐标位置。所 谓刀具的长度补偿即刀尖相对于该点的长度尺寸 即刀长。 实际上数控机床往往使用刀库中的某把
刀作为基准刀具,其他刀具的长度补偿均是刀尖 相对该刀具刀尖的长度尺寸,对刀则由基准刀具 完成。
数控加工-数控机床坐标变换 精品
0
0
0
1
绕 z 轴旋转 绕 x 轴旋转 绕 y 轴旋转
基本三维几何变换
3. 旋转变换矩阵规律:
xyz
x 1 0 0 0
对于单位矩阵
y 0 z 0
1 0
0 1
0 0
,绕哪个坐标
0 0 0 1
轴旋转,则该轴坐标的一列元素不变。按照二维
图形变换的情况,将其旋转矩阵 cos sin
sin cos
xyz
x 1 0 0 0 y 0 1 0 0 z 0 0 1 0
0 0 0 1
Y、z坐标的变化相当于在yoz平面内作正 角旋转。
1 0
0 0
x y z1 x y z 10 cos sin 0
0 sin cos 0
0 0
0 1
基本三维几何变换
(3) 绕y轴正向旋转 角,y坐标值不变,z、x的坐标相当
数控机床坐标变换 --机械
T T s he fir
Z1 X1
Y1 Z2 X2
Y2
Z3 Y3
X3
❖
描
述
X
船 舶
在
Y
海 中
a
航 行
Z
时
姿
态
nD T o he Sec
数控机床坐标系相关概念
数控机床坐标系相关概念
数控机床坐标系相关概念
数控机床坐标系相关概念
2.2 坐标变换原理
D T r he thi
中的元素添入相应的位置中,即
基本三维几何变换
(1) 绕z轴正向旋转 角,旋转后点的z坐标值不变, x、y
坐标的变化相当于在xoy平面内作正 角旋转。
cos sin 0 0
数控机床坐标系ppt课件

• 9.数控机床上工件坐标系的零点可以 随意设定
精选ppt
38
10.确定车床坐标系
前置刀架
精选ppt
后置刀架
39
11.确定加工中心坐标系
No Image
立式加工中心
精选ppt
卧式加工中心
40
感谢亲观看此幻灯片,此课件部分内容来源于网络, 如有侵权请及时联系我们删除,谢谢配合!
18
精选ppt
19
精选ppt
20
2.机床参考点
机床参考点是采用增量式测量的数控机床所 特有的,机床原点是由机床参考点体现出来 的,它是一个硬件点。机床参考点对机床原 点的坐标是已知值。
通常,机床参考点设置在机床各轴
靠近正向极限的位置(如图示)。
精选ppt
21
精选ppt
22
车床参考点一般位于行程的正极限点上
A.X轴 B.Y轴 C. Z 轴 D. W轴
精选ppt
36
4.数控机床坐标轴确定的步骤为( )
(A)X→Y→Z (B)X→Z→Y (C) Z→X→Y 5.采用增量式测量的数控机床开机后必须进 行__ 6.机床参考点和机床原点可以重合。 7.数控机床开机上电时,不一定非要回参考 点。
精选ppt
37
• 8.数控机床上有一个机械原点,该点 到机床坐标零点在进给坐标轴方向上 的距离可以在机床出厂时设定,该点 称()。
模块二 数控编程基础
任务一 数控机床的坐标系统
精选ppt
1
教学目标
1.掌握坐标轴的确定原则 2.掌握坐标轴的判定 3.掌握2个坐标系,三个点
精选ppt
2
数控机床坐标系及相关点【优质PPT】
2021/11/14
10
工件原点的选择原则
✓数控铣床或加工中心 上工件原点一般选在长 方体零件上表面的左下 角或中心处,或在圆柱 体零件轴线与上平面的 交点处。
2021/11/14
11
工件原点的选择原则
✓数控铣床或加工中心 上工件原点一般选在长 方体零件上表面的左上 角或中心处,或在圆柱 体零件轴线与上平面的 交点处。
撞工件和其他部件为准。
如在铣床上,常以机床参考点为换刀点;在加工中
心上,以换刀机械手的固定位置点为换刀点;在车床上,
则以刀架远离工件的行程极限点为换刀点。选取的这些
点2,021都/11是/14 便于计算的相对固定点。
18
情境二、数控机床的坐标轴和坐标系
5、编程坐标系、程序原点
编程坐标系
编程坐标系是在工件图纸上建立的坐标系。
数控机床坐标系及相关点
2021/11/14
1
情境二、数控机床的坐标轴和坐标系
3、机床坐标系、机床原点、机床参考点
机床坐标系
在数控机床上选定一个固定点作为坐标系原点而建立的坐标系称 为机床坐标系。也叫标准坐标系或机械坐标系。
机床原点
数控机床上选定的这个固定点称为机床原点,它是机床坐标系的 原点,是数控机床进行加工运动的基准参考点。
坐标是202一1/11个/14已知数。
5
机床参考点
✓数控车床上机床参考 点是离机床原点最远的 极限点。 ✓数控铣床上机床原点 和机床参考点是重合的。
2021/11/14
6
机床参考点
2021/11/14
数控机床开机时,必 须先确定机床原点,而 确定机床原点的运动就 是回参考点的操作,这 样通过确认参考点,就 确定了机床原点。只有 机床参考点被确认后, 机床原点才被确认,刀 具(或工作台)移动才 有基准。
CYCLE800循环编程教程
回转轴被定位,或者手动回转轴可以由操作人员旋入。 • 回转
否(仅计算)如果要求在激活回转循环之后回转轴不运行,则 适用于选择“回转 否”。应用:辅助回转平面根据零件图纸。 • 负/正方向 在回转循环中选择运行方向时,以回转轴1或者2为基准。通过 机床运动时回转轴的角度范围,可以由NCU计算两种可能的方 案,其中往往有一种方案在技术上更可行。两种方案中选择哪 一种回转轴(第一或者第二回转轴),则在CYCLE800 IBN菜单中进行。至于选择哪一种方案运行,则通过选择方向“ 负”或者“正”进行。
;回转循环
N5 CYCLE71(50,24,2,0,0,0,80,60,0,4,10,5,0,2000,31,5) ;平面铣削
N6 TCARR=0
;撤消回转数据组选择
N7 PAROTOF N8 TOROTOF
;(仅在机床运动类型“T”和“M”中)
N9 TRAORI N10 G54
;零点偏移重新计算
N11 EXTCALL „WALZ“
调用5轴转换的说明 如果在回转的加工平面中执行一个程序,该程序启动5轴转换(T RAOR),则在调用TRAORI之前必须关闭回转头/回转台的系统 框架(参见示例)。
回转 - CYCLE800
回转
举例(带回转台的机床)
N1 G54
N2 T=“MILL_10mm“
N3 M6 N4 CYCLE800(1,““,0,57,0,40,0,-45,0,0,0,0,0,-1)
回转循环考虑当前的加工平面(G17, G18, G19)。
回转到一个加工表面回转一个辅助平面时始终有3步: • 在旋转之前平移基准点(根据TRANS 或者 ATRANS) • 旋转(根据AROT 或者 AROTS) • 在旋转之后平移(根据ATRANS)
数控机床坐标系简介PPT课件

MM
W
P
W
XX
ZZ XX
MM
RR
ZZ 机机 床床原原点点 参参 考考点点
WW
PP
工工 件件原原点点 程程 序序原原点点
RR
参参 考考点 点 定定位位开开关 关
ZZ
Y
M MR RX
Y X
WW
XX ZZ
.
机床坐标系与工件坐标系的关系
工件坐标系 原点
.
机床坐标系 原点
3、加工坐标系
(1)加工坐标系的确定 • 加工坐标系是指以确定的加工原点为基
工件坐标系 原点
机床坐标系 原点
.
二、数控机床坐标系确定原则
1、刀具相对静止工件而运动的原则 假设:工件固定,刀具相对工件运动。这一原则使编程人员能在不知道是刀
具移近工件还是工件移近刀具的情况下,就能根据零件图样确定机床的加工过程。 反过来,如果假设当工件运动时,在坐标轴符号上加“′”表示。
.
2、标准坐标系(机床坐标系)的规定 标准坐标系采用右手直角笛卡儿定则。基本坐标轴x、Y、z的关系及其正方
.
(2)加工坐标系的设定 在机床坐标系中直接设定加工原点 ①加工坐标系的选择 编程原点设置在工件轴心线与工件底端面的
交点上。
假设编程原点02就在 距机床原点O1为X3、 Y3、Z3处。并且X3=-
345.700mm, Y3=196.220mm, Z3=53.165mm。见右图
.
②设定加工坐标系指令
.
(2)、X坐标轴 1)、X坐标轴的运动是水平的,它平行于工件装夹面,是刀具或工件定位平面内 的运动的主要坐标。 2)、对于工件旋转的机床(车床、磨床),X坐标的方向在工件的径向上,并且 平行与横滑座,刀具离开工件回转中心的方向为X坐标的正方向。 3)、对于刀具旋转的机床(铣床),若Z坐标轴是水平的(卧式铣床),当由主 轴向工件看时,X坐标轴的正方向指向右方;若Z坐标轴是垂直的(立式铣床), 当由主轴向立柱看时,X坐标轴的正方向指向右方;对于双立柱的龙门铣床,当由 主轴向左侧立柱看时,X坐标轴的正方向指向右方。 4)、对刀具和工件均不旋转的机床(刨床),X坐标平行于主要切削方向,并以 该方向为正方向。
CYCLE800循环编程.pdf
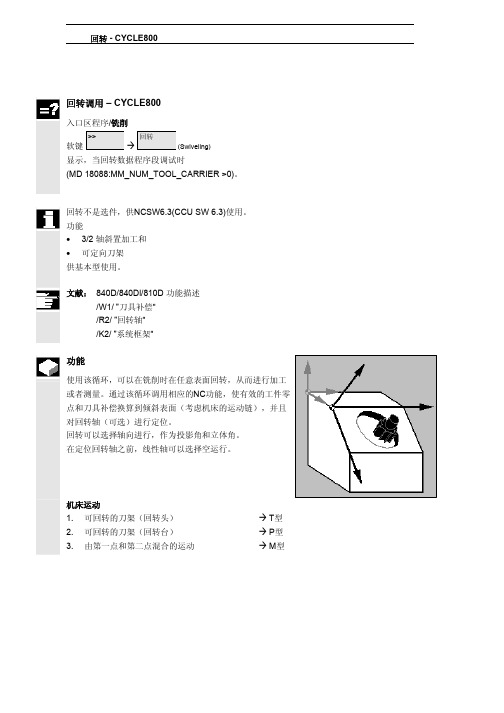
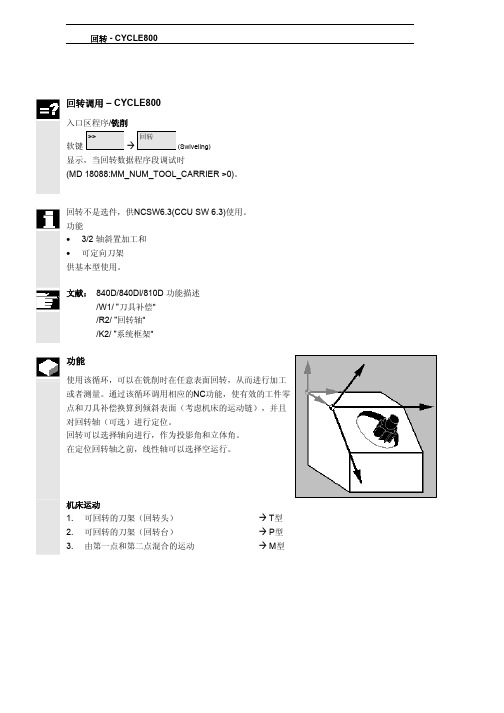
回转 - CYCLE800回转调用 – CYCLE800 入口区程序/铣削软键Æ显示,当回转数据程序段调试时(MD 18088:MM_NUM_TOOL_CARRIER >0)。
回转不是选件,供NCSW6.3(CCU SW 6.3)使用。
功能• 3/2 轴斜置加工和• 可定向刀架供基本型使用。
文献: 840D/840Di/810D 功能描述/W1/”刀具补偿“/R2/”回转轴“/K2/”系统框架“功能使用该循环,可以在铣削时在任意表面回转,从而进行加工或者测量。
通过该循环调用相应的NC功能,使有效的工件零点和刀具补偿换算到倾斜表面(考虑机床的运动链),并且对回转轴(可选)进行定位。
回转可以选择轴向进行,作为投影角和立体角。
在定位回转轴之前,线性轴可以选择空运行。
机床运动1. 可回转的刀架(回转头)Æ T型2. 可回转的刀架(回转台)Æ P型3. 由第一点和第二点混合的运动Æ M型回转 - CYCLE800重要在主程序中第一次调用回转循环之前,必须编程一个刀具(刀沿D>0)和零点偏移(NPV),用此刀沿对工件进行刮痕或者测量。
在此回转循环中,该零点偏移转换到相应的加工平面中,值保持不变。
平移和旋转部分在系统框架(回转框架)、刀具框架(TOOLFRAME)、刀架(PARTFRAME)和工件框架(WPFRAME)中存储(参见HMI->参数,有效NPV)。
回转循环考虑当前的加工平面(G17, G18, G19)。
回转到一个加工表面回转一个辅助平面时始终有3步:• 在旋转之前平移基准点(根据TRANS 或者 ATRANS)• 旋转(根据AROT 或者 AROTS)• 在旋转之后平移(根据ATRANS)平移或者旋转与机床无关,它们与工件坐标系X/Y/Z相关。
在回转循环中不使用可编程的框架。
在附加回转时考虑由用户编程的框架。
如果回转到一个新的回转平面,则删除可编程的框架(TR ANS)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数控机床铣头附件坐标转换和CYCLE800的应用一 .课题的提出和要求随我公司三轴联动龙门式数控机床产品技术的发展及用户工艺加工要求的提高和扩大,现有的数控机床铣头附件控制功能已不能满足用户的使用要求。
主要问题是,自动化更换机床铣头附件中,未能实现被加工工件参考坐标系的连续性转换;每次更换机床铣头附件后,只能中断加工程序进行手动重新设置加工工件参考坐标系的零点位置,且无法实现倾斜面的加工。
此问题影响到数控机床连续加工性、加工精度和加工效率。
因此已有不少购买我公司数控机床产的用户要求,数控机床更换铣头附件后自动实现加工工件参考坐标系的零点位置的自动设置、几何轴的旋转角度和当前加工坐标系平面的刀具补偿。
数控系统针对数控机床技术的发展的现状和用户要求,我们提出了建立在SEIMENS840D数控系统下的《数控机床铣头附件坐标转换和CYCLE800的应用》的研发课题。
本课题首先是,用来解决铣头附件坐标转换问题,提高我公司数控机床自动性能,扩大加工使用范围,以适应市场的需求,满足用户要求;其二是,进一步掌握数控机床的复杂的坐标转换技术,为在其他种类的数控机床和数控系统(例如,五轴联动数控机床、带附件铣头和旋转工作台数控镗铣加工中心和FANUC、FIDIA数控系统等)上的坐标转换技术应用打下基础,为今后的数控机床产品发展做好技术准备。
该课题的要求是:1.数控机床直角铣头、万能铣头和加长铣头附件的相对固定的Z轴滑枕上的坐标参考点的坐标平移和旋转(坐标转换)。
2.坐标转换后,刀具方向可根据坐标转换前所的加工平面(G17、G18、G19)定义新的刀具方向,以进行刀具长度和半径补偿。
3.能铣头坐标转换的几何轴回转具有三种模式,既逐轴、投影片角和立体角模式。
4.铣头附件的转动:手动和自动。
5.实现可编成的坐标转换下的铣头附件绝对的坐标转换。
二.课题国内现状简析虽然目前国内所使用的带附件铣头数控机床数量不少,但尚未发现使用数控机床铣头附件坐标转换功能。
使用万能附件铣头,回转C和B摆来确定刀具定向时,仅是回转几何同过手动来确定工件具有坐标系零点。
除五联动数控机床TPCR(刀具定向,具有结构动态补偿)功外,部分进口带附件铣头数控机床具有铣头附件坐标转换功能,而此功能是制造商用可编成几何坐标加工指令做成,使用受一定条件的限制。
鉴于国内数控机床前景及铣头附件坐标转换功能的重要性,已有厂家开始研发此项功能,借此提高数控机床的产品性能,以得到好的市场回报。
就数控系统发展而言,NC的功能性在逐渐提高,如在结构补偿中增加了附件坐标转换功能,FIDIA数控系统是这样,在三轴联动数控机床功能上设定虚拟轴来实现附件坐标转换功能;SEIMENS840D数控系统才用的是静态的框架结构补偿。
各数控系统在逐渐增加框架结构补偿功能性,因此数控机床铣头附件坐标转换作为NC的功能,其使用更加灵活和可靠。
三.解决方案通过对SEIMENS840D系统功能研究,有如下三种方案进行比较。
1.方案一,使用可编程的坐标转换,坐标旋转简便,但平移计算复杂,控制程序庞大而复杂,实现较为困难。
2.方案二,使用NC附件坐标转换功能,主要由两个部分。
一是绝对式的附件坐标转换功能(TCOABS)。
用于实现附件坐标转换平移补偿,转换后的工件和刀具坐标没有被旋转,仅刀具长度沿附件旋转角度定向。
坐标可过工件坐标旋转(PAROT)和刀具坐标旋转(TOROT)功能进行转动;TOROT功能按被附件坐标转换激活的角度定向刀具,同时覆写系统工件坐标变量$P_TOOLFR,使工件坐标发生旋转。
其二是相对于可编程的坐标旋转的附件坐标转换(TCOFR),用于实现附件坐标转换按可编程坐标旋转角度进行。
刀具补偿是根据变换前所在的平面(G17、G18G或19)被定位于新的坐标系中。
坐标旋转较为灵活,有逐轴、投影和立体角等转换方式,可根据附件的姿态和加工件灵活使用。
不足的是,没有介面支持,配置困难使用灵活性差。
3.方案三,使用CYCLE800功能循环程序。
由CYCLE800功能循环程序参数编辑界面、配置界面和CYCLE800程序(CYCLE800.SFP、TOOLCARR.SFP)组成,使用和设置灵活方便。
功能方面,主要是可编程的坐标旋转的附件坐标转换(TCOFR)、自动功能方式。
CYCLE800功能循环程序按铣头附件的摆动角(C和B角)先做工件坐标变量$P_WPFRAME($P_WPFR)角度设置进行坐标旋转,再进行可编程的坐标旋转的附件坐标转换(TCOFR、TCOFRY、TCOFRX)。
但无法使用绝对式的附件坐标转换功能,TCOABS功能CYCLE800功能循环程序中仅用做第二旋转轴为斜轴时的角度计算。
4.方案四,使用方案三结合方二案中的绝对式的附件坐标转换功能。
我们经对我公司数控机床铣头附件和用户的要求实验分析及上述方案比较,认为采用方案四是合理的。
四.方案分析1. 绝对式的附件坐标转换功能绝对式的附件坐标转换功能(TCOABS)使得工件坐标产生平移,刀具长度沿附件旋转角度定向,转换矢量见图1。
附件参考点是被设定在滑枕的断面上,是所有铣头附件的参考点。
L1:附件参考点至第一旋转轴的轴线矢量。
L2:第一旋转轴的轴线至第二旋转轴的轴线矢量。
L3:在第二旋转轴上的摆的长度矢量。
V1和V2:旋转轴线的角度矢量。
系统变量:$TC_CARR13[m] =“第一旋转轴的角度”$TC_CARR14[m] =“第二旋转轴的角度”$TC_CARR21[m] =“C”;第一旋转轴的轴符。
$TC_CARR22[m] =“B”;第二旋转轴的轴符。
$TC_CARR23[m] = “T”;定义刀具旋转。
$TC_CARR30[m]、$TC_CARR31[m]:第一旋转轴的正负角度限制。
$TC_CARR32[m]、$TC_CARR33[m]:第二旋转轴的正负角度限制。
$TC_CARR1[m]~ $TC_CARRm12m],$TC_CARR15[m]~$TC_CARR17[m] 是根据铣头附件的结构来设置L1、L2、L3、V1、V2矢量。
这些参数可通过CYCLE800程序的配置界面进行设定。
V1或V2旋转轴线的角度矢量在非平行于任何机床坐标轴,刀具方向相对于转换前的坐标的角度,通过PAROT功能后的系统坐标变量$P_PARTFRAME来确定。
当$TC_CARR13[m] 和$TC_CARR14[m]均为零时,附件坐标转换按$TC_CARR21[m] 和$TC_CARR22[m] (C和B轴)设定轴的实际位置角度计算。
自动方式下,C和B轴(模态方式)旋转角度有一定的范围,需设置$TC_CARR30~33参数。
NC在附件坐标转换功能中计算旋转方向和角度。
由变量$P_TCSOL读出计算状态,1是输入角度正确,2是存在第二解析,输入角度要通过读变量$P_TCANG[3]和$P_TCA NG[4]来修正。
3是入角度超出限制。
绝对式的附件坐标转换功能按图2配置。
图2中,附件参考点与第一旋转轴的轴线上的旋转点重合,矢量合为零(不包括刀具长度),转换后的附件补偿量在WCS中位移量为零,其类似“三轴到五轴转换功能”中的工件坐标的补偿矢量Po作用(区别是,前者为静态而后者为动态)。
2. CYCLE800功能循环程序图2中,附件坐标转换后,工件坐标的Z轴垂直于被加工的平面,这是典型的倾斜加工方式,CYCLE800功能循环如是。
根据所使用的铣头附件结构,用CYCLE800功能循环程序配置界图3图4面功能,设置图2(或图1)中矢量参数、铣头附件号、回缩方式、刀尖跟踪方式等。
界面编辑见图3、4。
附件坐标转形式:设置变量$TC_CARR23[m],T刀具旋转;P 工作台旋转;M刀具和工作台旋转。
矢量参数:设置变量$TC_CARR1[m]~ $TC_CARRm12m]、$TC_CARR15[m]~$TC_CARR17[m]。
铣头附件号:$TC_CARRn[m]中的值。
回缩方式:附件坐标转换前铣头附件沿Z轴(或X、Y)回退。
刀尖跟踪方式:使用“三轴到五轴转换功能”(TRAORI)。
TRAORI 功能启动后,WCS中的坐标值是刀尖的位置,故CYCLE800功能循环程序形式参数X0、Y0、Z0、X1、Y1、Z1不起作用。
坐标旋转仅为逐轴方式。
说明的是,使用TRAORI后再用附件坐标转换不方便,用RPY angle、Euler angle和Direction vector方式之一是合理的。
旋转角度限制轴的选择(Direction):根据CYCLE800功能循环中参数旋转轴的方向,是用于第一旋转轴或第二旋转,与CYC LE800程序形式参_DIR结合使用。
自动或手动方式(Mode):C和B轴的手动转动和自动转动。
旋转角度限制(Angle area):旋转角度的范围。
旋转记录:附件坐标转换后,产生一文件TC_LOG.MPF,记录坐标转换数据。
使用附件坐标转换要进一步对CYCLE800功能循环中参数设定,见图5。
图5铣头附件名:配置界面设定的铣头名称。
回退轴(Retract):附件坐标转换前铣头附件沿Z轴(或X、Y、Z和不回退)回退。
转换后的再旋转(SCHWENKEN):老的坐标转换在附件坐标转换后进行。
“Yes”是对老的坐标平面(swivel plane)起作用。
附件坐标转换计算角度=老的坐标平面角度+可编程坐标平面角度+A、B(C)角度。
坐标转换角度=老的坐标平面角度+可编程坐标平面角度。
坐标平面(swivel plane):新的--附件坐标转换前老的附件坐标转换被删除及不存在可编程坐标转换。
老的—建立在老的附件坐标转换及可编程坐标转换的附件坐标转换。
附件坐标转换计算角度和坐标转换角度=老的坐标平面角度+可编程坐标平面角度+A、B(C)角度。
旋转前参考点(Ret point X0\Y0\Z0):附件坐标转换前的WCS零点。
旋转方式(swivel mode):有逐轴、投影角和立体角三种。
旋转轴(Rrot around):一、二旋转轴绕几何坐标轴(X、Y、Z)的定义。
第三几何坐标轴未定义。
立体角方式下此参数的定义无意义。
旋转角度(A\B\C):铣头附件旋转角度。
旋转后参考点(Zero point X1\Y1\Z1):附件坐标转换后的WCS零点。
轴的旋转方向(direction):自动方式下,有正、负和最短距离方式。
刀尖跟踪方式(Tracking TL):在配置界面中设定。
CYCLE800功能按旋转方式输入角度,进行可编程的坐标旋转设置和变换。
立体角坐标旋转、刀具在Z轴方向和手动旋转方式,其主要转换程序段如下:N100 G17;选择加工平面。
N200 _WPFR=CTRANS(X,X0,Y,Y0,Z,Z0):CROT(C,“C轴的输入角度”):CROT(B,“B轴的输入角度”): CTRANS(X,X1,Y,Y1,Z,Z1); 立体角和平移量输入到中间坐标变量。