交通数据的地图匹配算法研究
基于GPS车辆轨迹数据的地图匹配算法及应用研究

基于GPS车辆轨迹数据的地图匹配算法及应用研究基于GPS车辆轨迹数据的地图匹配算法及应用研究摘要:随着GPS技术的发展,车辆轨迹数据的获取变得越来越容易。
而地图匹配算法则是通过将车辆轨迹数据与地图进行匹配,得到更准确的车辆位置信息。
本文对目前常用的地图匹配算法进行了系统的总结和比较,并提出了一种基于粗分类和细分类的混合匹配算法。
同时,针对城市道路中的复杂情况,提出了一种考虑车道划分的匹配算法。
最后,在实验中,将所提出的算法和其他算法进行对比,结果表明,所提出的算法能够在不同的道路环境下得到更高的匹配精度,并且在实际应用中具有较大的实用价值。
关键词:GPS车辆轨迹数据;地图匹配算法;粗分类;细分类;车道划分1.介绍GPS技术的普及和智能化交通系统的发展,为车辆轨迹数据的获取提供了越来越多的机会。
地图匹配算法,能够以GPS数据为基础,将车辆在道路上的位置精确地投影到地图上,并进一步提供交通运输领域的应用。
通过地图匹配,提高了GPS定位数据在车辆行驶分析中的可靠性和精确度。
2.研究现状目前,国内外学者在地图匹配算法上进行了广泛的研究和探索。
根据匹配所采用的算法和方法,可以将地图匹配算法分为4类:特征匹配方法、卡尔曼滤波方法、统计学方法和神经网络方法。
各类方法各有优缺点,研究者们在算法设计时需要进行合理的选择。
3.算法设计在目前地图匹配算法中,我们提出了一种基于粗分类和细分类的混合匹配算法。
该算法首先进行道路分类,然后根据具体道路环境进行匹配,从而得到更准确的车辆位置信息。
同时,为了解决城市道路中的复杂情况,我们还提出了一种考虑车道划分的匹配算法。
该算法能够通过GPS数据得到车辆的具体位置和所在车道的信息,解决了普通算法在城市道路中无法有效处理的问题。
4.实验本文所提出的地图匹配算法,在实验中得到了广泛的应用。
我们将所提出的算法和其他算法进行对比,并进行了实际道路测试。
结果表明,基于粗分类和细分类的混合匹配算法和考虑车道划分的匹配算法,能够在不同的道路环境下得到更高的匹配精度,并且在实际应用中具有较大的实用价值。
基于改进的HMM地图匹配算法

基于改进的HMM地图匹配算法作者:张浩刘大明来源:《现代信息科技》2020年第21期摘要:針对路网拓扑结构的复杂和轨迹信息利用不充分问题,文章提出了一种改进的HMM,该方法考虑了真实路网的拓扑信息,轨迹的位置、方向和速度信息。
在计算发射概率时用二维正态分布将轨迹的位置信息和方向信息融合,转移概率计算时考虑到候选道路的限制速度和距离的非线性关联,并在实验中得到验证,改进后的匹配成功率比传统HMM提高了7%。
关键词:拓扑结构;HMM;观测概率;转移概率中图分类号:TP301.6 文献标识码:A 文章编号:2096-4706(2020)21-0084-04The Map Matching Algorithm Based on Improved HMMZHANG Hao,LIU Daming(School of Computer Science and Technology,Shanghai University of Electric Power,Shanghai 200090,China)Abstract:In view of the complexity of road network topology and inadequate utilization of track information,an improved HMM method is proposed in this paper,which considers the topology information,track position,direction and velocity information of the real road network. In the calculation of the emission probability,the location information and direction information of the trajectory are fused together with the two-dimensional normal distribution. In the calculation of the transition probability,the nonlinear relation between the limit speed and distance of the candidate road is taken into account,which is verified in the experiment. The improved matching success rate is 7% higher than the traditional HMM.Keywords:topology;HMM;observation probability;transition probability0 引言随着无线通信技术和定位技术的发展,轨迹数据可用于空间数据挖掘、智能交通[1-3]、城市规划[4,5]等领域。
导航算法
GPS地图如何导航?编辑为你揭秘导航算法行业:电工电气信息来源:天极网数码影音频道发布时间:2011-02-18打印转发关闭车辆导航系统实时接收GPS位置速度信息,以交通地图为背景显示车辆行驶轨迹。
保证所显示的轨迹反映车辆的实际行驶过程,包括行驶路段,转弯过程及当前位置,就是地图匹配问题所要解决的目标。
本节首先对地图匹配问题涉及到的基础概念、误差模型给出简要说明,同时介绍当前流行的一些地图匹配算法的思路与特点。
4.1地图匹配问题介绍利用车载GPS接收机实时获得车辆轨迹,进而确定其在交通矢量地图道路上的位置,是当前车载导航系统的基础。
独立GPS车载导航系统中克服GPS误差以及地图误差显示车辆在道路网上的位置主要是通过地图匹配算法,也就是根据GPS信号中的数据和地图道路网信息,利用几何方法、概率统计方法、模式识别或者人工神经网路等技术将车辆位置匹配到地图道路上的相应位置[8-12]。
由于行驶中的车辆绝大部分都是在道路上的,所以通常的地图算法都有一个车辆在道路上的默认前提。
地图匹配的准确性决定了GPS车辆导航系统的准确性、实时性与可靠性。
具体来说取决于两方面:确定当前车辆正在行驶的路段的准确性与确定车辆在行驶路段上的位置的准确性。
前者是现有算法的研究重点,而后者涉及到沿道路方向的误差校正,在现有算法中还没有得以有效解决。
地图匹配的目标是将轨迹匹配到道路上,当道路是准确的时,也就成了确定GPS的准确位置,然后利用垂直映射方法完成匹配。
要实时获得车辆所在的道路及位置通过地图匹配来实现是一种比较普遍而且成本较低的方法。
车辆导航与定位系统中的地图匹配问题概括来讲就是将车载GPS接收机获得的带有误差的GPS轨迹位置匹配到带有误差的交通矢量地图道路上的相应位置。
下面我们通过具体的数学模型来给地图匹配问题以详细的数学描述。
地图匹配的基本过程如图4.1所示。
符号定义及其物理意义说明如下:1)g(k)是车辆GPS轨迹点,内容为k时刻车辆上的GPS定位数据(经纬度),对应于矢量地图上相应的经纬度位置点。
如何进行车辆导航系统中的地图匹配和路线规划
如何进行车辆导航系统中的地图匹配和路线规划车辆导航系统是现代交通工具中的一项重要技术。
它能够准确地为驾驶者提供路线指引和实时导航,提高行车安全和效率。
而地图匹配和路线规划是车辆导航系统中的核心功能之一,它们通过对车辆位置和道路信息的处理,以实现准确的导航和路线选择。
本文将探讨如何进行车辆导航系统中的地图匹配和路线规划。
地图匹配是指将车辆的实时位置与道路地图上的相应位置进行匹配。
它的目的是找到最佳匹配点,从而确定车辆实际所在的道路。
地图匹配算法主要通过利用车辆感知数据,如全球定位系统(GPS)数据和惯性测量单元(IMU)数据,结合道路地图信息来实现。
首先,通过GPS数据获取车辆的经纬度坐标,并利用地图信息找到附近的道路段。
然后,通过比较车辆位置和道路段的几何属性,如距离和角度,来确定最佳匹配点。
最后,通过考虑车辆移动的车速和方向,进一步优化匹配结果。
地图匹配的准确性和实时性对于车辆导航系统至关重要,因为它直接影响着导航指引的准确性和及时性。
在完成地图匹配后,车辆导航系统需要进行路线规划。
路线规划是指根据起点和终点的位置信息,选择最佳路径来实现导航。
路线规划算法主要通过考虑道路网络的拓扑结构和交通状况来实现。
首先,通过地图信息获取道路网络的拓扑结构,即道路之间的连接关系。
然后,通过交通状况信息,如道路拥堵情况和路段速度限制,对道路进行评估和排序。
最后,通过搜索算法,如A*算法或Dijkstra算法,找到起点到终点的最佳路径。
路线规划的准确性和高效性对于车辆导航系统来说非常重要,因为它直接影响驾驶者的出行体验和行车效率。
在进行地图匹配和路线规划时,还需要考虑一些特殊情况和复杂因素。
例如,车辆导航系统需要处理地图的更新和维护问题,因为道路网络和交通规划经常发生变化。
在地图更新时,需要将新的地图信息与车辆当前位置进行匹配和更新,以保证导航指引的准确性。
此外,车辆导航系统还需要考虑导航偏航和路径重规划问题。
地图匹配算法研究及应用

地图匹配算法研究及应用地图匹配算法是指将GPS轨迹数据与地图上的道路网络相匹配的算法。
随着GPS定位技术的普及,越来越多的人开始使用GPS设备来记录自己的行动轨迹。
然而,由于GPS测量误差和信号遮挡等原因,GPS轨迹数据并不完全准确,因此需要通过地图匹配算法来改善其精度。
一、传统地图匹配算法传统地图匹配算法主要有三种:最近邻算法、HMM算法和粒子滤波算法。
1.最近邻算法最近邻算法是一种简单且有效的地图匹配算法。
该算法首先将GPS轨迹点与道路网络上的所有节点进行距离计算,然后将GPS轨迹点与最近的节点相匹配。
该算法简单易实现,但其精度较低,对于道路较为复杂的区域容易产生匹配错误。
2.HMM算法HMM算法是一种基于贝叶斯理论的地图匹配算法。
该算法将GPS轨迹点视为观测序列,将道路网络视为状态序列,并使用HMM模型来匹配GPS轨迹点。
相对于最近邻算法,HMM算法考虑了GPS轨迹点之间的关系,在处理复杂的道路网络时具有较高的精度。
但是,该算法的计算复杂度较高,需要大量的计算资源。
3.粒子滤波算法粒子滤波算法是一种基于贝叶斯滤波的地图匹配算法。
该算法使用粒子滤波器来估计GPS轨迹点所在的道路,并通过重采样方法来改善估计的精度。
相对于HMM算法,粒子滤波算法更加灵活,可以处理不同种类的观测数据,并具有较高的精度。
但是,该算法的计算复杂度较高,在实时应用中需要充分考虑计算效率。
二、基于深度学习的地图匹配算法近年来,随着深度学习技术的不断发展,基于深度学习的地图匹配算法逐渐成为研究热点。
深度学习基于神经网络模型,通过学习海量数据来提高模型的精度。
基于深度学习的地图匹配算法主要有两类:基于卷积神经网络(CNN)的算法和基于循环神经网络(RNN)的算法。
1.基于CNN的算法基于CNN的地图匹配算法主要采用图像处理技术,将GPS轨迹数据转换成图像形式,然后使用CNN网络来匹配GPS轨迹点。
该算法可以处理复杂的道路网络,具有较高的精度,并且能够自动学习特征,避免了传统算法中需要手动设计特征的问题。
基于GPS技术的浮动车改进地图匹配算法研究
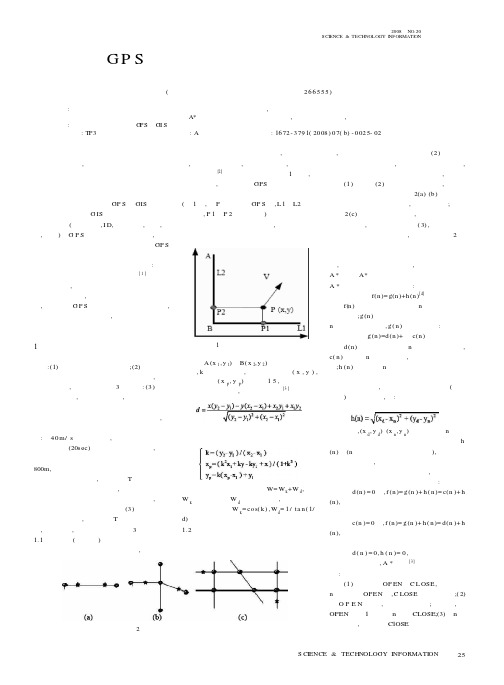
5科技资讯科技资讯S I N &T NOLOGY INFORM TION 2008NO.20SCI ENCE &TECHNOLOGY I NFORMATI ON 信息技术所谓的浮动车通常是指具有定位和无线通信装置的车辆,浮动车所采集的数据一般包括时间戳、位置坐标、瞬时速度、行驶方向等其他内容。
这些交通信息将被应用于交通信息服务、交通管理、交通规划等方面。
而这其中的核心技术就是GP S 与GIS 数据匹配处理器的设计。
G IS 数据提供了城市道路的基础数据(道路名称,I D,路口信息,长度,等级,坐标)。
G P S 定位数据是一个个点,且数据里包含有经纬度坐标。
匹配主要是将GP S 的每个离散的点能够快速准确的匹配到车辆真正行驶的路上。
常见的匹配方法有:点到点、点到线、线到线的匹配方法[1]。
匹配算法有多种,但往往都是考虑比较片面。
本文根据实际需要,总结了更为实用的匹配算法,特别是对G P S 离散位移较大的点的匹配,在一定的取样频率支持下,匹配精度可以达到更加实用的效果。
1对传统匹配算法的改进经典的地图匹配算法一般基于以下两个假设:(1)车辆一直在道路上行驶;(2)车辆行驶具有连续性。
针对智能交通系统的特点,考虑到人为因素,我们加入了第3个假设:(3)在两个匹配点之间,车辆正常行驶,即车辆可选择最短距离路径或最简单路径行驶。
最简单路径是指车辆在两点间所经过道路节点最少,行驶路径的结构最简单。
假设具有一定的合理性:若40m/s 为速度上限,假设认为车辆不会在短时间内(20sec)、短距离内迂回行驶,也就是说取数据的两个点之间路程间隔上限为800m,智能交通系统的重要性能之一就是要求高实时性的处理数据,系统参数T 的选择既要考虑车辆轨迹应有一定长度,同时也综合考虑红绿灯信号周期对行程速度计算的影响,所以根据不同情况和实际要求假设(3)可做相应调整。
实际应用中,我们应将T 的数据一次性读入,统一处理,具体实施分为以下3个方面。
地图匹配算法综述

地图匹配算法综述一、地图匹配:现有算法车辆导航系统实时接收GPS位置速度信息,以交通地图为背景显示车辆行驶轨迹。
保证所显示的轨迹反映车辆的实际行驶过程,包括行驶路段,转弯过程及当前位置,就是地图匹配问题所要解决的目标。
本节首先对地图匹配问题涉及到的基础概念、误差模型给出简要说明,同时介绍当前流行的一些地图匹配算法的思路与特点。
1.1 地图匹配问题介绍利用车载GPS接收机实时获得车辆轨迹,进而确定其在交通矢量地图道路上的位置,是当前车载导航系统的基础。
独立GPS车载导航系统中克服GPS误差以及地图误差显示车辆在道路网上的位置主要是通过地图匹配算法,也就是根据GPS信号中的数据和地图道路网信息,利用几何方法、概率统计方法、模式识别或者人工神经网路等技术将车辆位置匹配到地图道路上的相应位置[8-12]。
由于行驶中的车辆绝大部分都是在道路上的,所以通常的地图算法都有一个车辆在道路上的默认前提。
地图匹配的准确性决定了GPS车辆导航系统的准确性、实时性与可靠性。
具体来说取决于两方面:确定当前车辆正在行驶的路段的准确性与确定车辆在行驶路段上的位置的准确性。
前者是现有算法的研究重点,而后者涉及到沿道路方向的误差校正,在现有算法中还没有得以有效解决。
地图匹配的目标是将轨迹匹配到道路上,当道路是准确的时,也就成了确定GPS的准确位置,然后利用垂直映射方法完成匹配。
要实时获得车辆所在的道路及位置通过地图匹配来实现是一种比较普遍而且成本较低的方法。
车辆导航与定位系统中的地图匹配问题概括来讲就是将车载GPS接收机获得的带有误差的GPS轨迹位置匹配到带有误差的交通矢量地图道路上的相应位置。
下面我们通过具体的数学模型来给地图匹配问题以详细的数学描述。
地图匹配的基本过程如图4.1所示。
符号定义及其物理意义说明如下:图4.1 地图匹配模型1) g(k)是车辆GPS轨迹点,内容为k时刻车辆上的GPS定位数据(经纬度),对应于矢量地图上相应的经纬度位置点。
GPS导航系统中的地图匹配算法

a g rt m a ld pa a l l g a ma c i g me o , ih c l a a tv e t p l g h n e f n p r ew o k. e me o e e t e ma c o d lo i h c le r l o r m t h t d wh c a l d p i e t o o o y c a g s 0 仃a s o tn t r Th t d s l c st t h r a e n h h h h
等待时间等。
路段 S 的总权值 j
在导航系统初始匹配确定 了待匹配路段 , 后,利用垂直 投影将 GP S轨迹 点 g 投 影到路段 S 上 , , 垂足 P 即为相应时
21 初始路段 的选定与 匹配点位置的确定 . 初始路段的选定用于 确定算法启动 时刻车辆实际所处的
路段 ,此时没有任何 历史信息 。后续 G S轨迹 点的匹配会用 P
作者倚介 : 王
敏(94 ) 18- ,男, 士研 究生,主研方向 : 硕 智能交通 Em r hni - a :aag @ma. teu a l n i s. . l cd c u
析 ,但只利 用了定位 中的坐标信息 ,没有使用 G S采集数据 P 的车 头朝向或速度信息 。概 率论 匹配算法利用置信 区域筛选
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交通数据的地图匹配算法研究
摘要:城市智能交通引导系统为用户提供最准确的道路交通信息。
在分析地图匹配问题产生原因的基础上,阐述了地图匹配算法解决车辆在地图上位置定位的基本思想和判断依据,设计了交通引导系统中便于实现的地图匹配算法,通过引入行驶方向和驾车轨迹,地图匹配算法改进后提高了车辆定位的准确性。
系统实验证明,改进后的地图匹配算法能够很好的完成交通引导系统中车辆位置在地图显示中的定位匹配任务。
关键词:地图匹配行驶方向驾车轨迹定位匹配
智能交通引导系统是一个融合了车辆GPS定位技术和计算机技术,结合MapInfo电子地图,为用户提供优化、准确的道路交通信息服务平台。
系统通过导航生成GPS数据,获取车辆行驶信息,通过对交通数据的处理实现在客户端地图中显示车辆位置、方向和目的地等,并在地图上显示出满足要求的行驶路线。
路网中行驶的车辆位置坐标定位在电子地图上不可避免的存在误差,因为:(1)车辆GPS数据和电子地图数据所采用的坐标系可能不同,车辆的坐标位置显示在电子地图上会发生偏移;(2)电子地图坐标数据存在误差。
交通引导系统采用基于的电子地图,生成电子地图的基础数据来源于高精度卫星地形图。
地形卫星图片要经过扫描和栅格化等多重处理,每个处理环节不可避免的产生误差;(3)GPS定位误差。
车辆通过GPS定位时,车辆位置坐标数据会受到地形因素等的影响。
通常,车辆GPS定位精度误差范围一般在15~30 m之间。
因此,车辆行车数据在地图上显示时会出现偏差。
因此,通过地图匹配算法将车辆的行车数据与电子地图中的道路数据联系起来,从而判断车辆在地图上显示时相对准确的位置坐标。
1 地图匹配算法分析
地图匹配算法通过坐标转换将车辆位置坐标精确定位在路段或交叉口上。
1.1 地图匹配算法的原理
地图匹配算法借助电子地图提供的高精度道路交通数据来提高车辆的定位精度,利用已经确定的地理坐标如交叉口,路段分段的结点坐标,通过一定的算法,确定车辆的地图位置。
同时它需要满足:(1)所需匹配地图位置坐标的车辆总是行驶在道路上;(2)采用的电子地图道路数据的精度不低于车辆GPS定位的精度;(3)具备适用于地图匹配的具有拓扑结构的道路交通网络模型。
地图匹配算法的基本思想是:通过采集车辆在路段中行驶的坐标位置,判断车辆通行轨迹与电子地图路段的相关性。
以待匹配车辆在地图上的位置坐标或该车辆行驶历史路线为样本,获取到车辆周围的路段和路段间的交叉点,再将分段道路的数据作为模板,将样本与模板
按照一定条件进行匹配,从而确定车辆当前行驶路段,并将车辆投影到该路段的相应位置上。
根据车辆历史位置定位时为了保证有效性,地图匹配应该满足两个要求:(1)车辆初始位置确定;(2)每隔一段时间对地图中车辆位置进行重新匹配修正,以降低位置偏差[1-3]。
1.2 地图匹配算法的实现过程
地图匹配算法的处理流程包括:
(1)设定误差匹配范围:以车辆在地图上的待匹配点为中心选取一定范围的区域,在区域范围内的路段都有可能是与车辆轨迹相匹配的路段。
(2)确定待匹配路段:在区域范围内选取与车辆行驶轨迹最相似的车辆行驶路段。
如选取距离匹配点最近的路段作为最佳匹配路段。
(3)计算匹配位置:确定最佳匹配路段后,根据算法选取匹配点在该路段的投影作为匹配位置点。
2 地图匹配问题的解决方案
如图1所示,地图匹配算法就是为了寻找车辆待匹配点最近的路段,从而计算出车辆在地图上的最佳位置坐标P'。
根据地图匹配算法的匹配准则和实现过程,以图1简化的道路模型为例,详细介绍地图匹
配问题的解决方案。
2.1 误差匹配范围的确定
系统获取车辆GPS位置后,设定一定范围,从地图数据中选取范围内的路段作为候选路段,减少地图匹配算法在后续过程中为了确定最佳路段时对路段的判断次数。
以图1为例,为车辆在地图上显示的位置,R为搜索半径(可变化),P'为在带匹配路段上的投影。
如图所示,L1、L2、L3、L4为点周围的路段,其中L1、L2、L3在误差范围内,所以只去该三条路段进行车辆位置的匹配。
2.2 确定待匹配路段
确定待匹配路段的具体方法是:以搜索半径R为限制,将获取的待匹配路段分别求出与待匹配点的最短距离,选取距离最近的路段作为车辆在地图上的行驶道路。
按图1中信息进行抽取,得到如图2所示的坐标系。
其中,车辆位置坐标,为提取出的其中一条待匹配路段,为在该路段上的投影点。
、分别为该路段的两端点坐标,即为我们所需求取的与路段的距离。
利用矢量算法,求得距离的大小。
其中:向量, 。
点、的坐标可由地图数据库直接提供。
所求出的即为指定路段的最短距离。
按照图2所描述的情况求取距离最近的路段,必须具备定位点所到路段的投影必须在该路段上,垂线段即为最短距离。
但当如图3所示,点到路段投影在路段之外,我们这时候需要考虑的方向。
由空间几何运算,可知,当时,投影坐标满足图3情况;当时,投影坐标满足(a);当,投影坐标满足(b)。
如式3所示,当投影点在路段外时,我们认定点到路段的最短距离d为点到路段端点的距离。
2.3 计算道路匹配位置
定位误差范围内的所有路段到点的最短距离d作为车辆在地图上的行驶路段。
车辆行驶坐标点在该路段上的投影点即为车辆在地图上所显示的匹配位置。
当投影点在路段外时,选定路段的端点坐标为匹配坐标。
3 改进后的地图匹配算法
车辆的地图匹配工作是一个连续的不间断的过程,而不是某个时间点单一的车辆定位。
为了提升地图匹配的精确度,关键在于地图匹
配算法辨认出定位轨迹与车辆实际行驶路线间的相似度高的行驶路段,但是这种相似程度容易受到某些因素的影响。
如定位误差范围内的车辆匹配导致车辆的定位轨迹可能落在真实行驶路段相之外。
另外,当道路分布非常密集时,相互的间距相对较小,道路基本机构相同,采用匹配方法会给车辆位置的地图匹配带来了很大的不确定性。
车辆地图匹配的不确定性集中在复杂路段或道路的交叉口,误差范围内各路段的最短距离相差不大,容易产生错误的匹配结果。
为提高地图匹配算法的准确性,引入两个因素对算法进行改进,一是车辆的行驶方向(式5),一是车辆的行车轨迹。
当车辆行驶到路段交叉口时,引入行车方向的度量,如式(5):
其中:为车辆在定位点的行驶方向与第个待匹配路段所构成的夹角;为第个路段上的投影距离;、分别为最短距离d与间的比重[4]。
在交叉口处,车辆定位获取的参数越小,说明路段越接近车辆真实行驶路段。
地图匹配算法工作流程如图4所示。
4 结语
讨论了城市智能交通引导系统的地图匹配问题解决方案。
首先对地图匹配问题产生的原因进行了分析,阐述了地图匹配算法解决车辆
在地图上位置定位的基本思想和判断依据;然后在满足地图匹配的前提条件下,设计了在交通引导系统中便于实现的地图匹配算法;最后为了进一步提高车辆定位的准确性,引入了行驶方向和驾车轨迹等因素,对地图匹配算法进行进一步的改进。
实验证明,改进后的地图匹配算法能够很好的完成交通引导系统中车辆位置在地图显示中定位匹配的任务。
参考文献
[1] 常菲.综合地图匹配定位技术研究[J].计算机工程与应用,2004,19:200-202.
[2] 刘志德.地图误差对地图匹配质量的影响[J].测绘科学技术学报,2008,25(5):340-343.
[3] 荆涛.车辆导航系统中地图匹配的研究[J].铁路计算机应用,2008,17(7):1-5.。