单片机流程图
单片机程序流程图及源代码
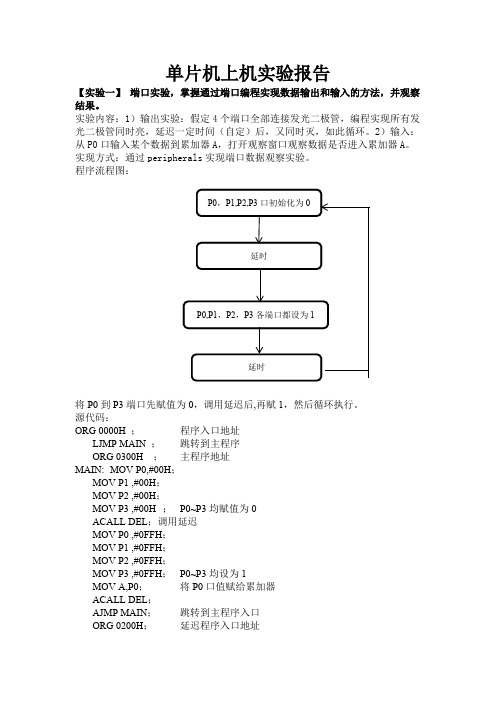
单片机上机实验报告【实验一】端口实验,掌握通过端口编程实现数据输出和输入的方法,并观察结果。
实验内容:1)输出实验:假定4个端口全部连接发光二极管,编程实现所有发光二极管同时亮,延迟一定时间(自定)后,又同时灭,如此循环。
2)输入:从P0口输入某个数据到累加器A,打开观察窗口观察数据是否进入累加器A。
实现方式:通过peripherals实现端口数据观察实验。
程序流程图:将P0到P3端口先赋值为0,调用延迟后,再赋1,然后循环执行。
源代码:ORG 0000H ;程序入口地址LJMP MAIN ;跳转到主程序ORG 0300H ;主程序地址MAIN:MOV P0,#00H;MOV P1 ,#00H;MOV P2 ,#00H;MOV P3 ,#00H ;P0~P3均赋值为0ACALL DEL;调用延迟MOV P0 ,#0FFH;MOV P1 ,#0FFH;MOV P2 ,#0FFH;MOV P3 ,#0FFH;P0~P3均设为1MOV A,P0;将P0口值赋给累加器ACALL DEL;AJMP MAIN;跳转到主程序入口ORG 0200H;延迟程序入口地址DEL:MOV R5,#04H;寄存器实现延迟,F3:MOV R6,#0FFH;若主频为12MHZ则F2:MOV R7,#0FFH;延时为256*256*4F1:DJNZ R7,F1;0.26S,人眼可分辨DJNZ R6,F2;DJNZ R5,F3;RET;从延迟程序返回END;结束3.假设P0口外接一个数码管(共阴),如图,请在数码管上轮流显示数字0~9(采用软件延时)。
程序流程图:将数码管的真值编码0~9依次赋给P0并调用延迟,然后循环运行程序即可。
源代码:ORG 0000H; 程序入口SJMP MAIN; 跳转到主程序ORG 0300H; 主程序入口地址MAIN:MOV P0,#0FCH; 将数码管0的编码赋给P0口ACALL DELAY; 调用延迟,使数码管亮0持续0.33SMOV P0,#60H; show 1ACALL DELAY;MOV P0,#0DAH; show 2ACALL DELAY;MOV P0,#0F2H; show 3ACALL DELAY;MOV P0,#66H; show 4ACALL DELAY;MOV P0,#0B6H; show 5ACALL DELAY;MOVP0,#0BEH; show 6ACALL DELAY;MOV P0,#0E0H; show 7ACALL DELAY;MOV P0,#0FEH; show 8ACALL DELAY;MOV P0,#0F6H; show 9ACALL DELAY;AJMP LOOP; 跳转到主程序入口ORG 0200H; 延迟程序入口DEL:MOV R5,#05H; 采用软件延迟,若主频为12MHz,则DEL1:MOV R6,#0FFH; 定时时间为256*256*5*1uS=0.33S,DEL2:MOV R7,#0FFH; 人眼可分辨。
单片机整套实验及程序(交通灯_跑马灯等)
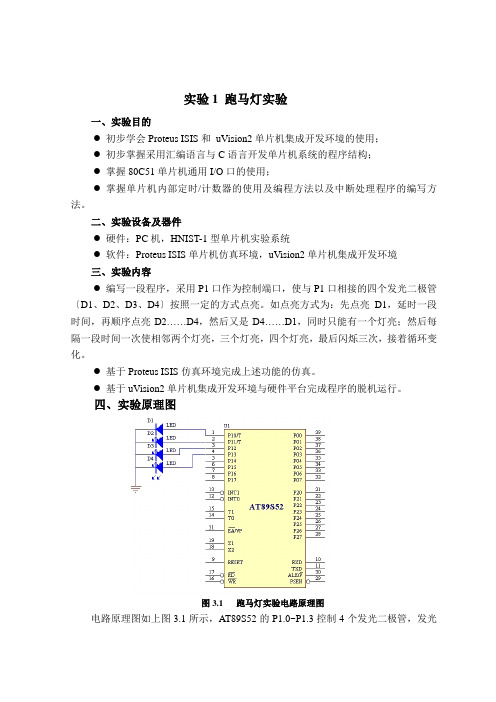
实验1 跑马灯实验一、实验目的●初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;●初步掌握采用汇编语言与C语言开发单片机系统的程序结构;●掌握80C51单片机通用I/O口的使用;●掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件●硬件:PC机,HNIST-1型单片机实验系统●软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境三、实验内容●编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管〔D1、D2、D3、D4〕按照一定的方式点亮。
如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
●基于Proteus ISIS仿真环境完成上述功能的仿真。
●基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
四、实验原理图图3.1 跑马灯实验电路原理图电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
五、软件流程图与参考程序●主程序流程图如下:●参考程序#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intuchar aa,num,speed,flag;uchar code table[]={0x0e,0x0d,0x0b,0x07};uchar code table1[]={0x0a,0x05,0x09,0x06};uchar codetable2[]={0x0c,0x09,0x03,0x08,0x01,0x0e,0x0c,0x08,0x00};void delay(uint z)//延时函数{uint x;uchar y;for(x=z;x>0;x--)for(y=200;y>0;y--);}void init()//条件初始化函数{ flag=0;speed=10;//控制跑马灯流水速度TMOD=0x01;//中断方式TH0=(65535-50000)/256;TL0=(65536-50000)%256;//初值EA=1;//翻开总中断ET0=1;//翻开外中断0TR0=1;}void main(){init();//调用初始化函数while(1){if(flag){delay(2000);//调用延时函数for(num=0;num<4;num++)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=0;num<4;num++)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁{P1=table2[num];delay(2000);}for(num=0;num<5;num++)//闪烁5次{P1=0xff;//全暗delay(2000);P1=0X00;//全亮delay(2000);}speed=speed-3;//变速if(speed==4){speed=10;}}}}void timer0() interrupt 1//中断函数{TH0=(65535-50000)/256;TL0=(65536-50000)%256;aa++;if(aa==speed){aa=0;flag=1;}}六、实验思考题●请用汇编指令完本钱实验内容,深刻理解汇编语言程序设计结构。
单片机四个实验报告流程图
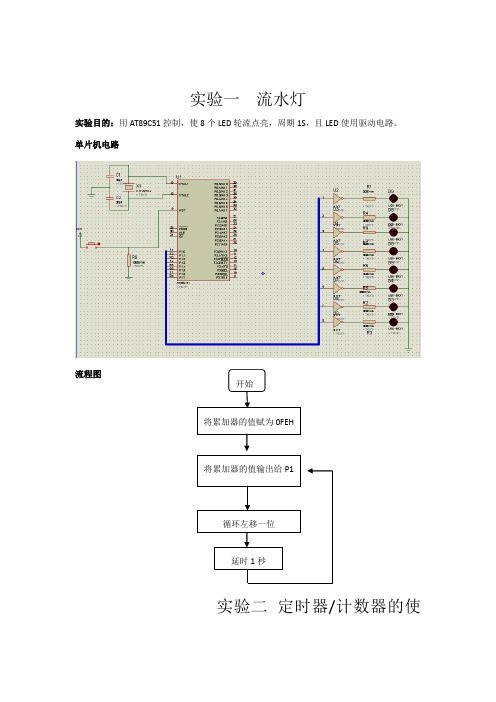
实验一流水灯
实验目的:用AT89C51控制,使8个LED轮流点亮,周期1S,且LED使用驱动电路。
单片机电路
流程图
开始
将累加器的值赋为0FEH
将累加器的值输出给P1
循环左移一位
延时1秒
实验二定时器/计数器的使
用
实验目的:用T0对1kHz方波进行计数,每满200个使输出翻转;用T1产生20ms定时,满200ms时使翻转,满1s时使翻转。
电路图
流程图
开始
给TMOD赋初值,设
设定定时器初值
开启中断
等待中断
T0中断子程序,翻转T1中断子程序,
翻转
T1中断子程序,
翻转
脉冲个数满200 T1计时满200ms T1计时满1s
实验三 矩阵键盘的使用
单片机电路
流程图
开始 扫描键盘码 延时10ms
再次扫描键盘码
比较两次键盘码
将上次的按键字符左移,将
寻找较键盘码对应的字符
Y
N
实验四双机通信
实验目的:单片机甲同期发送一个自累加数值,周期500ms,用定时器且用中断;单片机乙中断方式接收数据,并通过P1口外接LED显示。
实验电路图:
实验流程图:
单片机乙。
单片机设计程序流程图

设计题1:按下SW1电机全速运行,电机输出端P2.6输出高峰按下SW2电机半速运行,电机输出端P2.6输出低峰设计题2;四路抢答器说明:按下复位键后没有显示,开始抢答,根据P3口的输入值,显示对应的数字设计题3:双路报警器说明:正常时SW1为断开状态,SW2为闭合状态。
当小偷翻窗入室,会导致SW1闭合或SW2断开时,同时启动声光报警:直流蜂鸣器(BUZZER)通电发声,LED1与LED2交替闪亮,交替时间为0.5秒设计题4:三人表决器说明:程序检测按键,三个按键中如果有一个主裁判和任意一个副裁判按下说明有效设计题5:设计题:5:单双八拍说明:A→AB →B →BC→C →CD→D →DA设计题6:小便池自动抽水说明:当人靠近小便池时,出水2秒,人离开后,出水5秒(请考虑时间的精度问题)。
本题仅要求用一只普通开关SW1来代替人体红外感应开关,有人靠近时SW1接通,人离开时,SW1断开。
设计题7:小便池自动抽水说明:通过三档旋转开关设定高、中、低三档水位,水位设定好后单片机能按设定水位控制电磁阀注水,达到设定水位后停止注水。
设计题8:自动计数说明:当自动检测开关SW1检测到有工件通过时,马上闭合,然后断开,利用这一特点实现自动流水线货物(SW1接通次数)计数(00--99)。
设计题9:水塔水位说明:当水位低于B时,开启水泵电机进行抽水,水池水位慢慢升高,达到预设水位C时,水泵电机停止;放水时,水池水位低于B时,水泵电机又开始启动并抽水(排除机械故障),如此循环。
当系统处于进水状态时,要求指示灯D1点亮。
设计题10:自动风扇的电气控制说明:通过对光照的感应,实现对风扇(FA)的启停,当外界没有光照时,相当于是夜间工作方式,风扇停止工作,当有光照时相当于是白天,风扇启动,以达到节能的目的设计题11:计数指示灯说明:每按一次按键SW1,发光二极管向右移动增加一个亮灯,3个全亮后,再按按键,发光二极管全灭,之后再从最左一个开始点亮。
单片机水箱水位控制系统硬件框图流程图电路图汇编源程序.
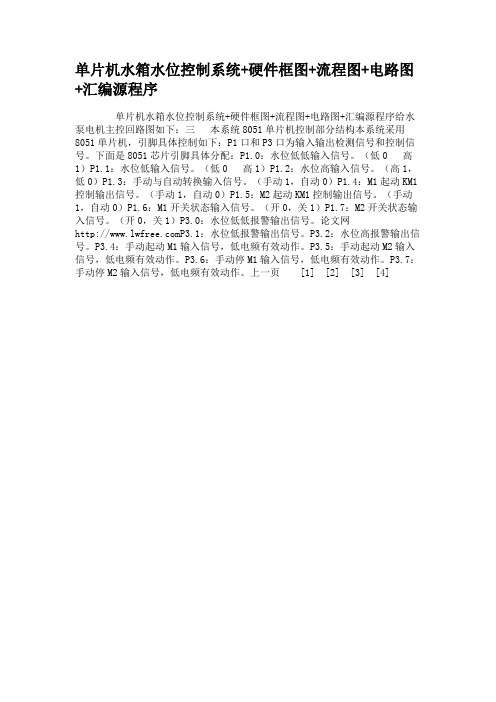
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序给水泵电机主控回路图如下:三本系统8051单片机控制部分结构本系统采用8051单片机,引脚具体控制如下:P1口和P3口为输入输出检测信号和控制信号。
下面是8051芯片引脚具体分配:P1.0:水位低低输入信号。
(低0 高1)P1.1:水位低输入信号。
(低0 高1)P1.2:水位高输入信号。
(高1,低0)P1.3:手动与自动转换输入信号。
(手动1,自动0)P1.4:M1起动KM1控制输出信号。
(手动1,自动0)P1.5:M2起动KM1控制输出信号。
(手动1,自动0)P1.6:M1开关状态输入信号。
(开0,关1)P1.7:M2开关状态输入信号。
(开0,关1)P3.0:水位低低报警输出信号。
论文网
P3.1:水位低报警输出信号。
P3.2:水位高报警输出信号。
P3.4:手动起动M1输入信号,低电频有效动作。
P3.5:手动起动M2输入信号,低电频有效动作。
P3.6:手动停M1输入信号,低电频有效动作。
P3.7:手动停M2输入信号,低电频有效动作。
上一页[1] [2] [3] [4]。
c51单片机温度传感器控制电机转动
图12 主程序流程图
5.2
读温度值模块需要调用4个子程序,分别为:
DS18B20初始化子程序:让单片机知道DS18B20在总线上且已准备好操作
DS18B20写字节子程序:对DS18B20发出命令
DS18B20读字节子程序:读取DS18B20存储器的数据
延时子程序:对DS18B20操作时的时序控制
4.2.2
图3DS18B20外形及引脚
GND:地
DQ:单线运用的数据输入/输出引脚
VD:可选的电源引脚
4.2.3
单总线通常要求接一个约4.7K左右的上拉电阻,这样,当总线空闲时,其状态为高电平。
图4 DS18B20接线原理图
4.2.4
主机使用时间隙来读写DS18B20的数据位和写命令字的位。
1.初始化时序如下图:
课程设计报告
基于单片机的DS18B20温度控制设计
学院:计算机科学与工程
专业:计算机科学与技术
班级:090603
学号:090603120
姓名:张阳阳
指导老师:乔永兴
1
随着人们生活水平的不断提高,单片机控制无疑是人们追求的目标之一,它所给人带来的方便是不可否定的,各种数字系统的应用也使人们的生活更加舒适。数字化控制、智能控制为现代人的工作、生活、科研等方面带来方便。其中数字温度计就是一个典型的例子。
图5 DS18B20初始化时序
2.DS18B20读写时序:
图6DS18B20读写时序
4.2.5
高速暂存存储器由9个字节组成,其分配如表5所示。当温度转换命令发布后,经转换所得的温度值以二字节补码形式存放在高速暂存存储器的第0和第1个字节。单片机可通过单线接口读到该数据,读取时低位在前,高位在后。
《单片机原理及应用》课程设计软件流程图

1.函数波形发生器流程图主程序流程T0中断服务程序流程2. 255秒定时器流程主程序流程图INT0中断服务程序流程T1中断服务程序流程T0中断服务程序流程3. 比例电压变换器流程主程序流程图4. 模拟电压显示器流程主程序流程图注:P1口和P3.0-P3.3接12个LED 灯,其中P3.3接最高位灯L12,P1.0接最低位灯L0。
5. 脉冲计数器流程主程序流程图T1中断服务程序流程图T0中断服务程序流程图6. 水塔水位控制器流程主程序流程图T0中断服务程序流程图T1中断服务程序流程图7. 占空比可调的方波发生器流程主程序流程图T0中断服务程序流程图注:T0的中断服务程序编制过程中必须注意使程序所有流程的执行时间小于100μS 。
否则,输出波形的频率不符合题目的要求8. 双机通过串行接口互传数据流程主程序流程图T0中断服务程序流程图串口中断服务程序流程图9. 花样流水灯流程主程序流程图T0中断服务程序流程图注:在主程序中由于仅使用了8bit运算,故实际A/D采样值为255时,得到的延时时间间隔为1280mS。
若要完全符合题意,则需要使用16bit的算术运算才能满足要求。
10. 模拟电压比较器流程主程序流程图T0中断服务程序流程图T1中断服务程序流程图11. 利用PWM 信号实现直流小电机的调速流程主程序流程图注:在程序的编制过程中,必须仔细调整延时37微秒的延时子程序的延时时间,使输出波形的频率满足题目要求。
12. 调频信号发生器流程主程序流程图T0中断服务程序流程图注:该程序编制过程中须注意,T0中断服务程序与主程序均使用0区的工作寄存器。
另外,T0的中断服务程序中最长流程的执行时间必须小于50微秒13. 频率计主程序流程图T1中断服务程序流程图动态显示子程序流程图主程序流程图14. 电子钟T0中断服务程序流程图INT0中断服务程序流程图动态显示子程序流程图15. 数字电压表主程序流程图T0中断服务程序流程图动态显示子程序流程图16. 数字跑表主程序流程图INT0中断服务程序流程图T0中断服务程序流程图动态显示子程序流程图17. 步进电机驱动器主程序流程图INT0中断服务程序流程T0中断服务程序流程。
单片机课程设计
前言单片微型计算机简称单片机,是典型的嵌入式微控制器(Microcontroller Unit),常用英文字母的缩写MCU表示单片机,单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
相当于一个微型的计算机,和计算机相比,单片机只缺少了I/O设备。
概括的讲:一块芯片就成了一台计算机。
它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。
同时,学习使用单片机是了解计算机原理与结构的最佳选择。
单片机是靠程序运行的,并且可以修改。
通过不同的程序实现不同的功能,尤其是特殊的独特的一些功能,这是其它器件需要费很大力气才能做到的,有些则是花大力气也很难做到的。
一个不是很复杂的功能要是用美国50年代开发的74系列,或者60年代的CD4000系列这些纯硬件来搞定的话,电路一定是一块大PCB板,但是如果要是用美国70年代成功投放市场的系列单片机,结果就会有天壤之别,因为单片机的通过编写的程序可以实现高智能,高效率,以及高可靠性。
单片机又称微控制器,以体积小、功能全、性价比高等诸多优点而独具特色,因此单片机技术已经普及到我们的生活、工作、科研等各个领域,本文主要介绍了一个基于AT89C51单片机的测温报警系统,描述了单片机的基本信息以及利用DS18B20数字温度传感器开发测温系统,对其外围硬件进行连接、软件编程等模块都进行了详细介绍。
该系统可以实现温度的采集和显示,并且可以根据需要设定温度的上下限报警温度,它使用起来相当方便,具有精度高、量程宽、灵敏度高、功耗低等优点,非常适合日常生活的温度测量。
DS18B20与AT89C51结合实现最简单的温度检测系统,该系统结构简单,抗干扰能力强,适合于恶劣环境下进行现场温度测量,有着广泛的应用前景。
1 概述1.1 数字温度计简介随着人们生活水平的不断提高,单片机控制无疑是人们追求的目标之一,它所给人带来的方便也是不可否定的,其中数字温度计就是一个典型的例子,但人们对它的要求越来越高,要为现代人工作、科研、生活、提供更好的更方便的设施就需要从数单片机技术入手,一切向着数字化控制,智能化控制方向发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机总流程图
主函数程序
#include<reg51.h>
#include<absacc.h>
#define uchar unsigned char
#define uint unsigned int
#define OSC_FREQ 12000000
#define __10ms (65536 - OSC_FREQ/(12000000/9970))
#define COM8255 XBYTE[0XFFF3]
#define PA8255 XBYTE[0XFFF0]
#define PB8255 XBYTE[0XFFF1]
#define PC8255 XBYTE[0XFFF2]
uchar code tab[]={0xFC,0x60,0xDA,0xF2,0x66,0xB6,0xBE,0xE0,0xFE,0xF6}; uchar code dis_HELLO[]={0x89,0x86,0xc7,0xc7};
uchar code dis_op51[]={0xc0,0x8c,0x92,0xf9};
uchar code dis_code[]={0xcf,0xa4,0xcf,0xa4};
uchar ucCnt_10ms=99;
uchar i=0;
uchar J=0;
uchar n=0;
uchar led1;
uchar led2;
sbit P2_4=P2^4;
sbit P3_7=P3^7;
sbit P1_0=P1^0;
sbit P1_1=P1^1;
sbit P1_2=P1^2;
void Disp_op51 ();
void Disp_HELLO();
void Set_Init_Xint();
void Set_Init_Timer();
void Disp_t();
void DelayX1ms(uint count);
void Disp_8255();
void main()
{
for(;;)
{
Set_Init_Xint();
Set_Init_Timer();
Disp_8255();
//ucCnt_10ms =99;
//ucLed1 = 6;
//ucLed2 = 8;
if ( n>=1 )
{
for(;;)
{
Disp_HELLO();
if (PB8255==0xef)
{
for(;;)
{
Disp_op51 () ;
Disp_t();
for(i=0;i<0xff;i++);
}
}
for(i=0;i<0xff;i++);
}
}
}
}
定时器T0流程图
定时器初始化函数程序void Set_Init_Timer()
{
TMOD=0x01;
TH0 = __10ms/256;
TL0 = __10ms%256;
EA=1;
ET0=1;
}
定时器中断服务函数程序Run_Time0(void) interrupt 1 using 2
{
TR0 = 0;
TH0 = __10ms/256;
TL0 = __10ms%256;
TR0 = 1;
ucCnt_10ms++;
if( ucCnt_10ms==200 ) //1s
{ ucCnt_10ms = 0;
led1++ ;
if( led1==10) //1S时间到更新显示缓冲值
{
led1 = 0;led2++;}
if(led2== 10)
{
led2 = 0 ;
}
}
}
外部中断0流程图
外部中断初始化函数程序
void Set_Init_Xint()
{
IT0=1;
EX0=1;
EA=1;
}
定时器中断服务函数程序
Run_Xint0(void) interrupt 0 using 1
{
n++;
TR0=1;
}
独立式按键流程图
8255定义入口
#define COM8255 XBYTE[0XFFF3]
#define PA8255 XBYTE[0XFFF0]
#define PB8255 XBYTE[0XFFF1]
#define PC8255 XBYTE[0XFFF2]
sbit P3_7=P3^7;
sbit P1_0=P1^0;
sbit P1_1=P1^1;
sbit P1_2=P1^2;
8255初始化函数程序void Disp_8255()
{
P3_7=0;
P1_0=0;
P1_1=1;
P1_2=0;
COM8255=0x82;
}
HELLO显示函数程序void Disp_HELLO() //HELLO显示函数
{
SCON = 0x00;
SBUF=0xFC;
P2_4=0;
while(!TI);
TI = 0;
P2_4=1;
P2_4=0;
SBUF=0x02;
while(!TI);
TI = 0;
P2_4=1;
P1=0x7A;
P2=dis_HELLO[0 ];
DelayX1ms(5);
P1=0xBA;
P2=dis_HELLO[1 ];
DelayX1ms(5);
P1=0xDA;
P2=dis_HELLO[2];
DelayX1ms(5);
P1=0xEA;
P2=dis_HELLO[3];
DelayX1ms(5);
}
void Disp_op51 ()
{
P1=0x7F;
P2=dis_op51[0 ];
DelayX1ms(5);
P1=0xBF;
P2=dis_op51[1 ];
DelayX1ms(5);
P1=0xDF;
P2=dis_op51[2 ];
DelayX1ms(5);
P1=0xEF;
P2=dis_op51[3 ];
DelayX1ms(5);
}
0~99显示函数程序void Disp_t()
{
SCON = 0x00;
SBUF=tab[led2];
P2_4=0;
while(!TI);
TI=0;
P2_4=1;
P2_4=0;
SBUF=tab[led1];
while(!TI);
TI=0;
P2_4=1;
}
void DelayX1ms(uint count) {
uint j;
while(count--!=0)
{
for(j=0;j<72;j++);
}
}。