单片机数据传送程序流程图
单片机实验指导书

目录实验一系统认识实验 (2)实验二端口I/O输入输出实验 (14)实验三外部中断实验 (17)实验四定时器实验 (21)实验五串行口通信实验 (25)实验六串行通信的调试实验 (29)实验七数码管静态显示实验 (34)实验八数码管动态显示实验 (39)实验一系统认识实验一、实验目的1.学习Keil C51编译环境的使用;2.学习STC单片机的下载软件STC-ISP的使用;3.掌握51单片机输出端口的使用方法。
二、实验内容任选单片机的一组I/O端口,连接LED发光二极管,编写程序实现8个LED按二进制加1点亮。
三、接线方案单片机P10~P17/C51单片机接L0~L7/LED显示,如下图:图1-1实验线路四、实验原理51单片机有4个8位的并行I/O端口:P0、P1、P2、P3,在不扩展存储器、I/O端口,在不使用定时器、中断、串行口时,4个并行端口,32根口线均可用作输入或输出。
作为输出时,除P0口要加上拉电阻外,其余端口与一般的并行输出接口用法相同,但作为输入端口时,必须先向该端口写“1”。
例如P0接有一个输入设备,从P0口输入数据至累加器A中,程序为:MOV P0, #0FFHMOV A, P0若将P0.0位的数据传送至C中,程序为:SETB P0.0MOV C, P0.0五、实验步骤1、连接串行通信电缆和电源线;2、根据图1-1实验线路进行电路连接;3、将C51单片机核心板上的三个开关分别拨到“独立”、“运行”“单片机”;4、打开实验箱上的电源开关。
5、利用Keil C51创建实验程序,并进行编译生成后缀为.HEX的文件;6、利用STC-ISP软件将后缀为.HEX的文件下载到单片机ROM中;7、观察实验现象,并记录。
若实验现象有误请重复第5、6步。
六、参考程序ORG 0000H ;程序的开始LJMP MAIN ;转入主程序ORG 0200H ;主程序的开始MAIN: MOV P1,#00H ;P1口做准备M1: INC P1 ;P1口连接输出计数,LCALL DELAY ;转入延时子程序LJMP M1 ;循环DELAY: MOV R5,#255 ;延时子程序D1: MOV R6,#255DJNZ R6,$DJNZ R5,D1RETEND ;程序体结束七、思考题1、利用其他I/O口实现LED加1点亮功能;2、利用P1端口实现流水灯(左移或右移)功能;3、实现LED其他点亮功能。
单片机数据传送指令c语言

单片机数据传送指令c语言单片机是一种集成电路,也称为微控制器。
它内部集成了处理器、存储器和各种外围设备接口,并且可以通过程序来控制其工作。
在单片机编程过程中,数据传送指令是常用的指令之一。
数据传送指令用于在单片机中传输数据,可以实现寄存器之间的数据传递、数据移动和数据保存等功能。
下面我将详细介绍单片机数据传送指令的使用方法。
首先,我们需要了解数据传送指令的基本格式。
数据传送指令通常以下面的形式出现:MOV destination, source。
其中,destination表示目标操作数,source表示源操作数。
要执行一条数据传送指令,首先需要确定传输数据的源和目标,然后根据具体需求选择合适的寻址方式来指定源和目标的地址。
下面我将介绍几种常用的寻址方式。
第一种寻址方式是立即寻址(Immediate Addressing)。
在立即寻址中,source指定了一个立即数,表示需要传送的数据。
立即数是在指令中给出的常数值,可以直接传送到目标寄存器或内存地址中。
例如,MOV A, #15表示将立即数15传送到A寄存器中。
第二种寻址方式是直接寻址(Direct Addressing)。
直接寻址中,source 指定了一个源寄存器或内存地址,将该寄存器或内存地址中的内容传送到目标寄存器或内存地址中。
例如,MOV A, B表示将B寄存器中的内容传送到A寄存器中。
第三种寻址方式是寄存器间接寻址(Register Indirect Addressing)。
在寄存器间接寻址中,source指定了一个寄存器的地址,将该寄存器中的内容传送到目标寄存器或内存地址中。
例如,MOVX @DPTR, A表示将A 寄存器中的内容传送到DPTR寄存器指向的内存地址中。
第四种寻址方式是间接偏移寻址(Indirect Offset Addressing)。
在间接偏移寻址中,source指定了一个源寄存器和一个偏移量,将源寄存器地址加上偏移量得到的地址中的内容传送到目标寄存器或内存地址中。
单片机程序流程图及源代码
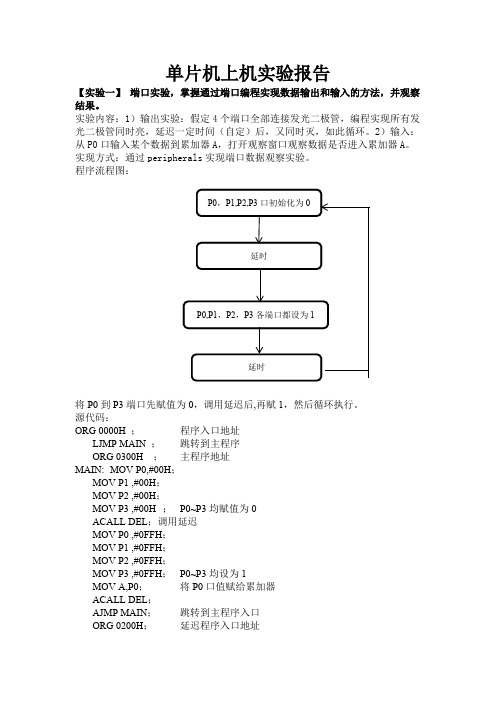
单片机上机实验报告【实验一】端口实验,掌握通过端口编程实现数据输出和输入的方法,并观察结果。
实验内容:1)输出实验:假定4个端口全部连接发光二极管,编程实现所有发光二极管同时亮,延迟一定时间(自定)后,又同时灭,如此循环。
2)输入:从P0口输入某个数据到累加器A,打开观察窗口观察数据是否进入累加器A。
实现方式:通过peripherals实现端口数据观察实验。
程序流程图:将P0到P3端口先赋值为0,调用延迟后,再赋1,然后循环执行。
源代码:ORG 0000H ;程序入口地址LJMP MAIN ;跳转到主程序ORG 0300H ;主程序地址MAIN:MOV P0,#00H;MOV P1 ,#00H;MOV P2 ,#00H;MOV P3 ,#00H ;P0~P3均赋值为0ACALL DEL;调用延迟MOV P0 ,#0FFH;MOV P1 ,#0FFH;MOV P2 ,#0FFH;MOV P3 ,#0FFH;P0~P3均设为1MOV A,P0;将P0口值赋给累加器ACALL DEL;AJMP MAIN;跳转到主程序入口ORG 0200H;延迟程序入口地址DEL:MOV R5,#04H;寄存器实现延迟,F3:MOV R6,#0FFH;若主频为12MHZ则F2:MOV R7,#0FFH;延时为256*256*4F1:DJNZ R7,F1;0.26S,人眼可分辨DJNZ R6,F2;DJNZ R5,F3;RET;从延迟程序返回END;结束3.假设P0口外接一个数码管(共阴),如图,请在数码管上轮流显示数字0~9(采用软件延时)。
程序流程图:将数码管的真值编码0~9依次赋给P0并调用延迟,然后循环运行程序即可。
源代码:ORG 0000H; 程序入口SJMP MAIN; 跳转到主程序ORG 0300H; 主程序入口地址MAIN:MOV P0,#0FCH; 将数码管0的编码赋给P0口ACALL DELAY; 调用延迟,使数码管亮0持续0.33SMOV P0,#60H; show 1ACALL DELAY;MOV P0,#0DAH; show 2ACALL DELAY;MOV P0,#0F2H; show 3ACALL DELAY;MOV P0,#66H; show 4ACALL DELAY;MOV P0,#0B6H; show 5ACALL DELAY;MOVP0,#0BEH; show 6ACALL DELAY;MOV P0,#0E0H; show 7ACALL DELAY;MOV P0,#0FEH; show 8ACALL DELAY;MOV P0,#0F6H; show 9ACALL DELAY;AJMP LOOP; 跳转到主程序入口ORG 0200H; 延迟程序入口DEL:MOV R5,#05H; 采用软件延迟,若主频为12MHz,则DEL1:MOV R6,#0FFH; 定时时间为256*256*5*1uS=0.33S,DEL2:MOV R7,#0FFH; 人眼可分辨。
PC机与单片机之间的串行通讯、数据的发送和接收
PC机与单片机之间的串行通讯、数据的发送和接收【摘要】本文以MCS-51单片机为例,详细介绍了PC机与单片机之间的串行通讯、数据的发送和接收。
在Windows98下利用VB的串行通讯控件可实现PC机与单片机之间的通讯。
其数据的发送和接收采用红外线通信方式,其优点是:省去了有线通信信号线的直接连接,使用简单,移动方便,微机与单片机无直接连接,属完全隔离状态,两者间不会因为电平的不同而造成数据传输的失误,抗干扰能力强。
本设计主要应用AT89C51作为控制核心,并与LED数码显示管、双向可控硅、红外发射与接收相结合的系统,充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
【关键字】MSC-51(单片机),红外,RS-232,电平转换器,串行通信半双工【Abstract】This text take one-chip computer MCS-51 for example , introduce a serial communication, data’s sending and receiving . Under the Windows98 we make use of a communication control of VB to achieve the communication of the machine of PC and one-chip computer. Its data’s sending and receiving adopts the method of the infrared ray communication, its advantage is that it exclude the direct link of signal line of with-wired communication ,and usage are simple, and move is convenience etc. The tiny machine have no direct conjunction with single a machine, belonging to the complete insulation appearance, can't result in the error that data deliver both because give or get an electric shock even and different, the antijam ability is strong.This design is a system that it applies AT89C51 as control core and combine the LED figures manifestation tube, MAX232CPE level changer, infrared’s sending and receiving. The system completely exerts the function of one-chip computer. Its advantage is that the hardware circuit is simple; the software function is perfect; the control system is dependable; the rate of price and function is high etc. So the system has certainly consult value.【Keyword】MSC-51(One-chip computer), infrared, RS-232, Level changer, serial communication,half duplex目录前言3第一章系统分析4 1.1 系统功能的概述 5 1.2 系统要求及主要内容 5 1.3 系统技术指标 5第二章系统总体设计6 2.1硬件设计思路 6 2.2软件设计思路 7第三章硬件电路设计7 3.1 单片机模块设计 8 3.2 红外通信(发射与接收)电路的设计 14 3.3 PC机模块的设计 17第四章串行口通信技术20 4.1 单片机串行口通信 21 4.2 PC机串口通信 24第五章软件设计25 5.1 单片机通信程序设计 25 5.2 PC机通信程序设计 29第六章系统调试30 6.1 硬件调试 30 6.2 软件调试 31 6.3 综合调试 33 6.4 故障分析及解决方案 33 6.5 结论与经验 34结束语35附录36 附录1 电路原理图 36 附录2程序流程图 38 附录3程序清单 41 附录4元器件清单 44 附录5 英文资料 45 附录6 中文翻译 52参考文献56前言单片机的英文名称是Micro Controller unit,缩写为MCU,又称为微控制器,它是一种面向控制的大规模集成电路芯片。
单片机实验程序及流程图
《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义三.程序清单及程序流程框图ORG 0000H Array LJMP MAINMAIN: MOV R0,#30HMOV R2,#10HCLR AA1: MOV @R0,AINC R0INC ADJNZ R2,A1MOV R0,#30HMOV R1,#40HMOV R2,#10HA2: MOV A, @R0MOV @R1,AINC R0INC R1DJNZ R2, A2MOV R1,#40HMOV DPTR ,#4800HMOV R2, #10HA3: MOV A,@R1MOVX @DPTR ,AINC R1INC DPTRDJNZ R2,A3MOV SP,#60HMOV R2,#10HMOV DPTR ,#4800HPUSH DPLPUSH DPHMOV DPTR,#5800HMOV R3,DPLMOV R4,DPHA4: POP DPHPOP DPLMOVX A,@DPTRINC DPTRPUSH DPLPUSH DPHMOV DPL,R3MOV DPH,R4 MOVX @DPTR,A INC DPTRMOV R3,DPLMOV R4,DPHDJNZ R2,A4MOV R0,#50HMOV DPTR,#5800H MOV R2,#10HA5: MOVX A,@DPTR MOV @R0,AINC R0 INC DPTR DJNZ R2,A5POP DPH POP DPL HERE: LJMP HEREEND《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义三.实验电路四.程序清单及流程图程序一ORG 0000HLJMP MAIN ORG 000BH LJMP IPTO MAIN: MOV SP, #30H MOV TMOD, #01HCLR 00H SETB EA SETB ET0 MOV TH0, #3CH MOV TL0, #0B0H MOV R1, #14H SETB TR0 MOV A, #0feH MOV P1, A NT: JNB 00H, NT RL A MOV P1, ACLR 00H LJMP NT IPTO: MOV TH0,#3CH MOV TL0,#0B0HDJNZ R1, TIOMOV R1, #14HSETB 00HTIO: RETIEND程序二只需将程序一中“RL A”改为“RR A”即可实现其功能。
《单片机教学》课件

实现方案:详细介绍如何利用单片机技术实现智能农业的应用,包括硬件和软件的设计 与实现
案例总结:总结智能农业应用案例的优点和不足,提出改进和优化建议
感谢您的观看
汇报人:PPT
04 单片机基本操作
单片机的启动和关闭
启动:上电后,单片机自动启动并开始运行程序 关闭:通过软件或硬件方式关闭单片机,停止程序运行
单片机的复位操作
复位操作的方式:手动复位 和自动复位
复位操作的原理:通过特定 的复位引脚或外部信号触发
复位操作的作用:清除单片 机内部状态,回到初始状态
复位操作的应用:提高单片 机系统的稳定性和可靠性
接口技术的实例演示
接口技术概述: 介绍接口技术的 基本概念、分类 和应用领域
接口电路设计: 介绍单片机接口 电路的设计方法 和注意事项
接口技术实例演 示:通过具体实 例演示单片机接 口技术的应用, 包括输入输出接 口、串行通信接 口、并行通信接 口等
实验与验证:通 过实验验证单片 机接口技术的可 行性和可靠性, 包括硬件连接、 软件编程和调试 过程等
《单片机教学》 PPT课件
PPT,a click to unlimited possibilities
汇报人:PPT
目录 /目录
01
点击此处添加 目录标题
04
单片机基本操 作
02
单片机概述
05
单片机程序设 计
03
单片机基础知 识
06
单片机接口技 术
01 添加章节标题
02 单片机概述
单片机的定义和特点
智能家居控 制系统的设 计与实现: 详细介绍智 能家居控制 系统的设计 思路、硬件 组成和软件 实现方法。
第3章_MCS-51单片机指令系统及汇编语言程序设计2
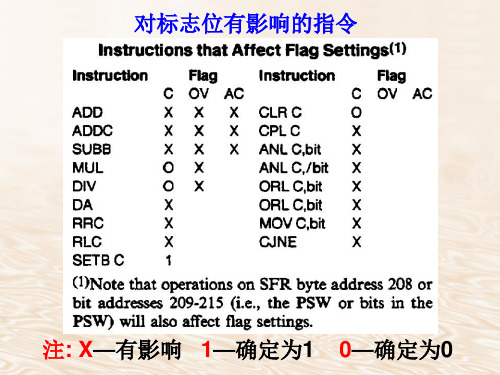
3. 汇编语言的语句格式是什么?使用标号有什么限制?注释段起什么作用? 答案: MCS-51汇编语言的语句格式应符合下列结构: 【标号:】 操作码 【操作数】【;注释】 标号位于语句的开始,由以字母开头的字母和数字组成,它代表该语句的地址。 标号与操作码之间要用“:”隔开,标号与“:”之间不能有空格,“:”与操 作码之间可以有空格。 注释在语句的最后,以“;”开始,是说明性的文字,与语句的具体功能无关。 4. MCS-51汇编语言有哪几条常用伪指令?各起什么作用? 答案: ORG:汇编程序起始地址,用来说明其后程序段在存储器中存放的起始地址; EQU:赋值指令,用来给变量标号赋予一个确定的数值; DB:定义数据字节,指令按字节数的形式把数据存放在存储单元中; DW:定义数据字,按字(双字节)的形式把数据存放在存储单元中; DS:定义存储区,从指定的地址单元开始,保留一定数量的存储单元; BIT:位定义,其功能是把位地址赋给字符名称; END:汇编结束,表明汇编语言程序结束。
2.顺序程序
顺序程序是指程序中没有使用转移类指令的程序段,机器执行这 类程序时也只需按照先后顺序依次执行,中间不会有任何分支、循环, 也不需要调用子程序。 例:将一个单字节十六进制数转换成BCD码。 解:算法分析。单字节十六进制数在0~255之间,将其除以100后, 商为百位数;余数除以10,商为十位数,余数为个位数。 设单字节数存放在40H,转换后,百位数存放在R0中,十位数存 放在R1中,个位数存放在R2中,具体程序如下: ORG 0030H MOV A, 40H ;将单字节十六进制数送入A中 MOV B,#64H ;将100送入B中, #64H可直接写成#100 DIV AB MOV R0,A ;百位数送R0,余数在B中 XCH A,B ;余数送入A中 MOV B,#0AH ;将10送入B中, #0AH可直接写成#10 DIV AB ;商为十位数,余数为个位数 MOV R1,A MOV R2,B SJMP $
单片机程序编程流程ppt课件
完成后即进入 初始化寄存器 r2 作为累加器,初始值为 0;
uiArray[i+1] = uiTmep; for(Count = 0;Count <= 100;Count++)
• 累加循环;在累加循环当中,累加器的数值 【实验目的】
掌握 µ\u8217XnSP™ IDE 集成开发环境的一般使用方法。 第一页,编辑于星期五:十三点 二十三分。
第四页,编辑于星期五:十三点 二十三分。
பைடு நூலகம்
【程序流程】
•
第五页,编辑于星期五:十三点 二十三分。
流程说明
• 初始化寄存器 r2 作为累加器,初始值为 0;
在程序运行中主要用到 r1~r4 四个通用寄存器和 BP(r5)、SP、PC、SR 四个特殊功能寄存器。
寄存器 r1 为加数,初始值为 1。初始化操作 第十二页,编辑于星期五:十三点 二十三分。
把 r2 累加的结果送到[Sum]单元中。 2) 对于n 个数,理论上说应该进行(n-1)次冒泡才能完成排序,但实际上有时不到(n-1)次就已经排完。
第六页,编辑于星期五:十三点 二十三分。
.DEFINE P_Watchdog_Clear 0x7012
.RAM
.VAR Sum
//定义变量Sum
.CODE
.PUBLIC
_main
_main:
r1 = 0x0001
r2 = 0x0000
?Loop:
r2 = r2 + r1
//累加
r1 = r1 + 1
cmp r1,100
//比较r1与100,如不大于则继续累加
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序清单
ORG 0000H
MOV R2, #10H;初始化程序控制变量
MOV 30H, #00H
MOV R0, #30H
MOV A, #00H
LOOP1: MOV @R0, A
INC R0
INC A
DJNZ R2, LOOP1;循环是否结束是往下继续,否则循环
MOV R2, #10H;初始化循环控制变量
MOV R0, #30H;取地址30H
MOV 40H, #00H
MOV R1, #40H;取地址40H
LOOP2: MOV A, @R0
MOV @R1, A;数据传送
INC R1
INC R0
DJNZ R2, LOOP2;循环是否结束是往下继续,否则循环
MOV R2, #10H;初始化循环控制量
MOV R0, #40H
MOV DPTR, #4800H;取外部地址4800H指针变量
LOOP3: MOV A, @R0
MOVX @DPTR, A;数据传送
INC R0
INC DPTR;修改指针变量
DJNZ R2, LOOP3;循环是否结束是往下继续,否则循环
MOV R2, #10H;初始化循环控制量
MOV R1, #00H
MOV DPTR, #4800H;取外部地址4800H给指针变量
LOOP4: MOVX A, @DPTR
PUSH DPH;指针变量高位压人堆栈
PUSH DPL;指针变量低位压人堆栈
MOV DPH, #58H;取外部5800H高八位地址送给指针变量高八位
MOV DPL, R1;修改指针变量低八位
MOVX @DPTR, A;数据传送
POP DPL;弹出指针变量低位
POP DPH;弹出指针变量高位
INC DPTR;修改指针变量
INC R1
DJNZ R2, LOOP4;循环是否结束是往下继续,否则循环
MOV R2, #10H;初始化循环控制量
MOV DPTR, #5800H;取外部地址5800H给指针变量
MOV R0, #50H;去片内地址50H
LOOP5: MOVX A, @DPTR
MOV @R0, A;数据传送
INC R0;
INC DPTR;
DJNZ R2, LOOP5;循环是否结束是往下继续,否则循环
END。