汽车半主动磁流变悬架的自适应双模糊控制方法
某4×4车辆磁流变半主动悬架模糊控制

o
m
输 入 矩 阵 B=
一
1 0
0 一
m u
N B
NM
NS
ZO
PS
PM
PB
一
生
m s
一
0 Βιβλιοθήκη m m 输 出 矩 阵 C=
1
O
0
0
0
O
O
0
0
k
0
0
l
× ) (
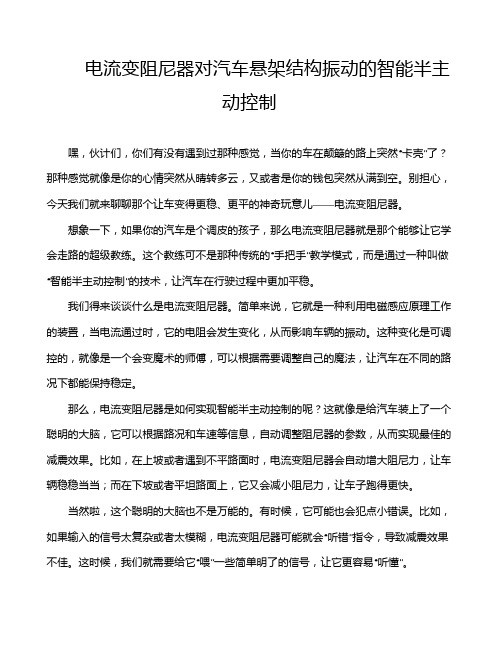
图 3 输入 隶 属度 函数
基于模糊控制器的磁流变悬架 14车体动力学仿真模型 , / 并 进行 了随机路 面和 阶跃输入下的动 力学 仿真 , 为磁流变半主 动悬架系统控 制器 的硬件设计及实 车试验提供了理论基础。
图 l 二 自由度 磁 流 变半 主 动 悬 架模 型
上 面 的方 程 组 可 以改 写 为 状 态 方程 :
方 程 来 描 述 , 流 变 半 主 动 悬 挂 控 制 方 法 的 选 择 取 决 于 系 统 磁
复杂性 、 响应时 间 、 器的数量与控制效果 的折 中策 略等 。 传感
通 过 建 立 Ma a/ iuik控 制 系 统 仿 真 平 台 , tb Sm l l n 比较 不 同 控 制
汪 小平 , : 4x 等 某 4车辆磁 流 变半 主动 悬架模糊控 制
O O
1l 3
言 变 量 , 悬 挂 减 振 器 所 需 阻 尼 力 u为 输 语 言 变 量 。 输 以 入 、 出 变量 的模 糊 子 集均 为 i B N N , O P ,M, B , 输 , M, SZ , S P P } N 论 域 为 [ ,] 一6 6 。输 入 、 出 隶 属 度 函 数 为 三 角 形 函 数 , 图 输 如
越野车半主动悬架的变论域模糊PID控制

Vol. 46 No. 6
Jun. 2022第46卷第6
期
2022年6
月
液压与毛动Chinese Hydraulics & Pneumatics
doi: 10.11832/j. issn.
1000-4858.2022.06.010
越野车半主动悬架的变论域模糊PID控制
潘乾鹏,周 龙,
吕宝占
,王禹龙
(河南理工大学 机械与动力工程学院,
河南焦作
454003)
摘要:为了改善半主动悬架的控制效果,利用变论域理论对模糊
PID控制器的输入论域和输出论域
进行调节。根据阻尼可调两级压力式油气悬架的力学特性,建立半车半主动悬架动力学模型,在
MATLAB/
Simulink中构建半车半主动悬架控制模型,以冲击路面和随机路面作为输入激励进行仿真。结果表明
,不同
路面激励下,
变论域模糊PID控制悬架和模糊
PID控制悬架的减振效果均明显好于被动悬架,在冲击路面激
励下的减振效果较好。冲击路面激励下,相较于模糊PID控制悬架,变论域模糊PID控制悬架的前、
后车身
垂直加速度和车身俯仰角加速度均方根分别减小30. 89% ,34.36% ,37.00% ,
车身动挠度均方根比较接近,
进一步提高了越野车的行驶平顺性。
关键词:
越野车;半主动悬架;
变论域;模糊
PID
;平顺性
中图分类号:TH137;TH138
;U463 文献标志码:B
文章编号:1000^1858 (2022)
06-0082-11
Variable Universe Fuzzy PID
Control of Semi-active
Suspension for
Off-road Vehicle
PAN Qian-peng, ZHOU Long, LV Bao-zhan,
WANG
Yu-long
(School of Mechanical and Power Engineering, Henan Polytechnic University, Jiaozuo, Henan 454003
汽车磁流变半主动悬架控制方法研究

汽车磁流变半主动悬架控制方法研究
方子帆;邓兆祥
【期刊名称】《中国机械工程》
【年(卷),期】2007(018)009
【摘要】根据变论域方法对经典模糊控制算法进行了改进,提出了悬架阻尼力变论域模糊控制算法.根据悬架阻尼控制力与磁流变阻尼器输出阻尼力的力误差,设计了磁流变阻尼器驱动电流控制方法.由汽车结构振动模糊控制子系统和磁流变阻尼器驱动电流控制子系统构建了磁流变半主动悬架控制器,用模糊集语言赋值系数反映了悬架伸张行程和压缩行程不对称阻尼控制力的关系.利用二自由度车辆振动系统简化模型和磁流变阻尼器简化力学模型及其参数,确定了控制器结构及其参数.研究结果表明,该方法具有较好的控制精度和适应能力.
【总页数】4页(P1121-1124)
【作者】方子帆;邓兆祥
【作者单位】三峡大学,宜昌,443002;重庆大学,重庆,400044
【正文语种】中文
【中图分类】U463.335.1
【相关文献】
1.磁流变半主动悬架的天棚控制方法研究 [J], 赵云堂;陈思忠;冯占宗;吴志成;杨林
2.汽车磁流变半主动悬架系统自适应反推跟踪控制 [J], 庞辉;陈嘉楠;刘凯
3.汽车磁流变半主动悬架的模糊控制 [J], 叶晓濛;龙海洋;裴未迟;李耀刚;张硕;楚京
4.某越野汽车磁流变半主动悬架变论域模糊控制 [J], 庞辉;刘凡;王延
5.汽车磁流变半主动悬架的模糊控制 [J], 叶晓濛;龙海洋;裴未迟;李耀刚;张硕;楚京;;;;;;
因版权原因,仅展示原文概要,查看原文内容请购买。
电流变阻尼器对汽车悬架结构振动的智能半主动控制
电流变阻尼器对汽车悬架结构振动的智能半主动控制嘿,伙计们,你们有没有遇到过那种感觉,当你的车在颠簸的路上突然“卡壳”了?那种感觉就像是你的心情突然从晴转多云,又或者是你的钱包突然从满到空。
别担心,今天我们就来聊聊那个让车变得更稳、更平的神奇玩意儿——电流变阻尼器。
想象一下,如果你的汽车是个调皮的孩子,那么电流变阻尼器就是那个能够让它学会走路的超级教练。
这个教练可不是那种传统的“手把手”教学模式,而是通过一种叫做“智能半主动控制”的技术,让汽车在行驶过程中更加平稳。
我们得来谈谈什么是电流变阻尼器。
简单来说,它就是一种利用电磁感应原理工作的装置,当电流通过时,它的电阻会发生变化,从而影响车辆的振动。
这种变化是可调控的,就像是一个会变魔术的师傅,可以根据需要调整自己的魔法,让汽车在不同的路况下都能保持稳定。
那么,电流变阻尼器是如何实现智能半主动控制的呢?这就像是给汽车装上了一个聪明的大脑,它可以根据路况和车速等信息,自动调整阻尼器的参数,从而实现最佳的减震效果。
比如,在上坡或者遇到不平路面时,电流变阻尼器会自动增大阻尼力,让车辆稳稳当当;而在下坡或者平坦路面上,它又会减小阻尼力,让车子跑得更快。
当然啦,这个聪明的大脑也不是万能的。
有时候,它可能也会犯点小错误。
比如,如果输入的信号太复杂或者太模糊,电流变阻尼器可能就会“听错”指令,导致减震效果不佳。
这时候,我们就需要给它“喂”一些简单明了的信号,让它更容易“听懂”。
好了,现在我们来聊聊这个“喂”信号的方法。
你得确保你的车况稳定,这样才能准确地测量出车辆的振动情况。
然后,你可以使用一些简单的工具,比如弹簧秤或者振动传感器,来监测车辆的振动情况。
将这些数据输入到电流变阻尼器的控制系统中,让它根据这些信息来调整阻尼器的参数。
这样一来,电流变阻尼器就能更好地为你服务了。
它不仅能帮你解决“卡壳”的问题,还能让你的汽车变得更加平稳、舒适。
想想看,是不是觉得很神奇呢?总的来说,电流变阻尼器就像是一位智能的“教练”,通过“智能半主动控制”的技术,让汽车在行驶过程中更加平稳。
半主动悬架的试验和模糊神经网络控制

尼力 B ( x1 - x2) 和变化阻尼器阻尼力 u 组成 , 即
F = B ( x1 - x2) + u
(10)
由此可见 , 半主动悬架状态方程为状态变量的非
线性函数 。变量多 : 路面特性 、车速 、由乘员或货物
决定的车身质量以及随车速 、温度和胎压而变的轮胎
刚度等都是变量; 变化范围大 : 如空载和超载等 。因 此 , 用常规的控制方法很难奏效 。
本文通过最有代表性的二自由度l4半主动悬架系统进行研究既保留了许多最主要的特性又免除了整车研究的复杂性因为四分之一悬架模型远比现有的decarbon模型先进总能精确模拟车体在广泛操作范围内的垂直位移通过计人非线性因素如弹簧阻尼轮胎等特性可得到精确度很高的值
《机床与液压》20041No16
·75 ·
半主动悬架的试验和模糊神经网络控制
·76 ·
Vt —伺服阀流总压缩容积 。
伺服阀的线性化流量方程为 :
q = Κqxv - Κcpl
(5)
式中 : q —伺服阀工作流量;
Κq —伺服阀流量增益;
Kc —伺服阀流量 - 压力系数 。
又 xv = τ1 ( - xv + u)
(6)
如果选状态变量为 :
x1 = x1 x2 = x1 , x3 = x2 , x4 = x2 , x5 = pl ,
x6
=
1 τ
(
-
x6 +
u)
(7)
上式中 , r 可看成是系统的干扰 。
因此 , 半主动悬架系统的完整状态方程可以描述
为:
x = Ax + Bu + cr
(8)
状态变量为 :
汽车半主动悬架模糊控制研究的开题报告
汽车半主动悬架模糊控制研究的开题报告一、选题背景和意义汽车悬架系统是汽车的重要组成部分之一,它直接影响汽车的安全性、稳定性和行驶舒适性。
目前,随着科技的不断发展,汽车悬架系统也在不断升级和改进,从最初的被动悬架转变为目前应用广泛的主动悬架和半主动悬架。
半主动悬架系统不仅可以提高汽车的操控性能,还可以避免因悬架刚度过高或过低而带来的安全隐患。
与主动悬架相比,半主动悬架系统具有成本低、维护简单、响应速度快等优点,因此越来越受到人们的青睐。
模糊控制是一种能够应用于各种控制领域的智能控制方法,它能够根据系统的实际情况进行自适应调节,并且具有简单、鲁棒性强等特点。
因此,将模糊控制应用于汽车半主动悬架系统,不仅能够提高悬架系统的控制效果,还可以减少控制器硬件的成本,提高系统的实用性。
二、论文目的和研究内容本文旨在研究汽车半主动悬架模糊控制的方法,通过模糊控制算法对半主动悬架系统进行控制,提高悬架系统的控制精度和鲁棒性。
具体研究内容如下:1. 半主动悬架系统的结构和工作原理。
2. 半主动悬架的数学模型和控制策略。
3. 模糊控制算法的基本原理和应用。
4. 基于模糊控制的半主动悬架系统控制器设计与仿真。
5. 实验验证半主动悬架模糊控制的效果与性能。
三、论文研究方法1. 文献调研法通过查阅相关文献,熟悉半主动悬架系统的工作原理和数学模型,了解模糊控制算法的基本原理并寻求是否有相关研究。
2. 数学建模法基于汽车半主动悬架系统的结构和工作原理,建立起数学模型和控制策略,为控制器的设计提供参考指导。
3. 模糊控制算法设计和仿真针对汽车半主动悬架系统的数学模型和控制策略,设计模糊控制器,并进行仿真研究,以验证控制效果和优越性。
4. 实验验证通过实验对半主动悬架模糊控制的控制效果和性能进行验证,吸取经验教训,提高算法的稳定性和鲁棒性。
四、预期成果1. 可以深入了解半主动悬架系统的工作原理和控制方法。
2. 建立稳定的半主动悬架数学模型,并基于这个模型设计出合理的控制策略。
基于自适应模糊的汽车半主动悬架容错控制
第2期2021年2月144机械设计与制造Machinery Design & Manufacture 基于自适应模糊的汽车半主动悬架容错控制姚行艳(重庆工商大学计算机科学与信息工程学院,重庆400067)摘要:半主动悬架可以自适应调节阻尼器的阻尼力,具有良好的可控性。
针对半主动悬架的增益故障,提出了基于自适应模糊控制的汽车半主动悬架容错控制。
在分析汽车半主动悬架阻尼器输入输出特性的基础上,建立了阻尼器发生增益 故障时的故障悬架模型,设计了未知输入观测器对阻尼器增益故障进行故障诊断。
基于自适应模糊控制对汽车半主动悬架系统阻尼器增益故障设计容错控制器,在C 级随机路面下进行容错控制的Matlab/Simulink 软件仿真,结果表明自适应 模糊容错控制的控制效果要优于无容错控制。
关键词:自适应模糊;汽车半主动悬架;增益故障;容错控制中图分类号:TH16;U463.33文献标识码:A 文章编号:1001-3997(2021 )02-0144-04Fault Tolerant Control of Automotive Semi-Active SuspensionBased on Adaptive Fuzzy ControlYAO Xing-yan(School of Computer Science and Information Engineering, Chongqing Technology and Business University , Chongqing 400067, China)Abstract : Semi-suspension can be controller to adapt the desired damping force. A iming at the gain failure of semi-activesuspension, this paper proposes afault-tole r ant control of s emi-actwe suspension f or vehicles based on adaptive fuzzy control.Based on the analysis of the input and output characteristics of the semi-actwe suspension damper of the vehicle , the fault suspension model of the damper with gain failure is established. The unknown input observer is designed to diagnose the damper gain fault. Then the fault-tolerant controller for the damper gain failure of the semi-active suspension system of thevehicle is designed based on adaptive fuzzy control. The Mailab/Simulink software simulation of f ault-tolerant control is carried out under C-class random roads, respectively. The results show that the control effect offault-tolerant control is better thanthat of non-fault-tolerant control.Key Words : Adaptive Fuzzy ; Semi-Suspension ; Gain Fault ; Tolerant Controls1引言汽车半主动悬架是安装在车身与车轮之间缓冲并衰减来自路面给车轮冲击性的垂向反力的一种装置,以保证汽车的乘坐舒适性和操纵稳定性气当汽车半主动悬架系统的阻尼器发生故障时,基 于传统控制理论设计的控制算法没有考虑系统潜在的故障,也没有 设计故障发生时相应的处理措施,阻尼器一旦发生故障,将会造成 控制器输出紊乱,达不到期望控制效果,严重影响汽车的乘坐舒适性般纵稳定性气容體制是对控制系统可能出现的故障情况采 取控制方法,使控制系统性能指标在完好无故障或故障情况下均能 满足要求冋。
某越野汽车磁流变半主动悬架变论域模糊控制
第39卷第2期2019年4月Vol.39No.2Apr.2019振动、测试与诊断Journal of Vibration,Measurement7Diagnosisdoi:10.16450/ki.issn.1004-6801.2019.02.013某越野汽车磁流变半主动悬架变论域模糊控制!庞辉,刘凡,王延(西安理工大学机械与精密仪器工程学院西安,710048)摘要为了解决半主动悬架传统变论域模糊控制器过度依赖经验规则的问题,提出了一种基于模糊神经网络的变论域T-S模糊控制策略。
首先,根据磁流变减振器阻尼特性的实验结果,建立基于自适应模糊神经网络的减振器阻尼力模型及1/2车辆半主动悬架动力学模型;其次,建立悬架系统T-S模糊控制器,同时为了实时调节T-S模糊控制器变量的论域,采用模糊神经网络结构描述伸缩因子的变化’仿真结果表明,笔者提出的变论域模糊控制策略能够有效提高车辆行驶平顺性和操作稳定性。
关键词半主动悬架;磁流变减振器;变论域;T-S模糊控制;模糊神经网络中图分类号TH113.1引言车辆悬架系统的主要功能是吸收由路面不平度引起的振动响应,同时保证轮胎与路面的不间断接触以提高车辆行驶平顺性和操纵稳定性)12*。
由于半主动悬架(semi-active suspension,简称SAS)兼顾被动悬架(passive suspension,简称PS)的稳定性和主动悬架的自适应能力,能够根据行驶工况实时调整阻尼力大小,实现与主动悬架相近的减振效果,同时无需过多的能量消耗,因而受到了研究人员广泛关注,磁流变减振器(magneto-rheological,简称MR)作为非线性元件被广泛应用于半主动悬架系统中旧。
但是因为其非线性以及磁滞特性,该减振器力学模型难以精确描述*5*。
Stanway等6建立了磁流变减振器的Bingham模型,该模型能很好地描述磁流变减振器阻尼力的时域特性及阻尼力与位移的关系特性,但无法表示在速度较小的区域内阻尼力与速度的关系。
汽车磁流变半主动悬架系统模糊控制仿真研究
根据 牛顿 第二定 律 .建立 其运动 微分 方程 为 :
『 = z )C — 2 同 ) m 一 2 ) 一 + I 1 ( — 1 k(lx -  ̄l ) ) , = 1d ) 2 - g c - 一 n - x 2
根 据式 1 、式 2 ,可得到 :
c=
周 玉丰 , 龙 . 车 磁 流 变 半 主 动悬 架 系统 模 糊 控 制 仿 真 研 究 [. 国农 机 化 , 0 2 ()19 1217 吴 汽 J 中 】 2 1,3: 4 — 5 , 5
Z OU Y —eg wU Ln . i lt ns d nfz o t l f e iem g e —elg a sm - ci upninss m [. H u fn , o g S muao t yo z cnr hc an t ro i l e iat esse s yt J i u uy oov l o oc v o e 】
“ ) — 活 塞与缸 体 间 的相 对 流速 ; —
— —
流 体 的动力 粘度 :
线 圈 匝数 : 输 入 电流 :
Ⅳ 一 , _
架 系 统模 糊 控 制 器 的设 计 与 动 态 仿 真 对 改 进 悬 架 系 统设 计 .提 高 汽 车行 驶 的平 顺 性 和 安 全 性 有 着 重 要
架 系 统可视 为 磁流变 被动 悬架 系统 .其运 动微 分方 程
同式 3
3 模 糊 控 制器 的设 计
31 模 糊 控 制 器 设 计 .
模 糊控 制 器【 以模糊 条 件语 句 描 述 的语 言控 制 7 】 是 规则 为 基础 .它 的控制规 则是 通过 人为经 验 总结 出来 的 ,输 入变量 一般有 两个 .输 出变量一般选 控制量 。 本模 糊控 制半 主动 悬架 系统 是 以悬 架 系统 非簧 载 质 镀 和簧 载 质量 的相 对位 移 ( , 其 变化 率 ( 一 X 1及 2 : 33 比例 因子 及隶 属 函数 的选 择 . 模 糊化前 先将 各变量 规范 化 .规范 化 的过程 即论 域变 化 的过 程 ,实 际 变量 e c 与规 范 化 后 的 变 、e 、
汽车磁流变半主动悬架的模糊 PID 控制研究
汽车磁流变半主动悬架的模糊 PID 控制研究
郭全民;雷蓓蓓
【期刊名称】《西安工业大学学报》
【年(卷),期】2015(000)003
【摘要】为了解决传统的被动悬架阻尼参数不可调节,汽车的乘坐舒适性和操纵稳定性难以改善的问题。
提出使用磁流变阻尼器代替被动阻尼器,通过将磁流变阻尼器基于BP神经网络的逆向模型与模糊PID控制器形成闭环反馈来实现对汽车悬架的半主动控制。
通过仿真实验和数据分析得到,基于磁流变阻尼器的模糊PID 控制的半主动悬架系统的车身垂直加速度、悬架动挠度和轮胎动载荷的均方根植明显比被动悬架的均方根值小。
结果表明:该方法可以有效地提高汽车的乘坐舒适性和操作稳定性,改善悬架系统的性能。
【总页数】9页(P192-200)
【作者】郭全民;雷蓓蓓
【作者单位】西安工业大学电子信息工程学院,西安 710021;西安工业大学电子信息工程学院,西安 710021
【正文语种】中文
【中图分类】U270.1+1
【相关文献】
1.磁流变半主动悬架自适应模糊PID控制研究 [J], 张衍成;陈学文
2.模糊PID控制在磁流变半主动悬架中的应用 [J], 李伟平;柳超;张利轩;张宝珍;王
振兴
3.汽车磁流变半主动悬架的模糊控制 [J], 叶晓濛;龙海洋;裴未迟;李耀刚;张硕;楚京
4.某越野汽车磁流变半主动悬架变论域模糊控制 [J], 庞辉;刘凡;王延
5.汽车磁流变半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
婚车的挑选 既要尊重传统,又想紧跟潮流,究竟该选择什么样的车型做婚 车才最合时宜呢?
杭州婚车租赁
婚车:好彩头 / 结婚是喜事,处处讲究讨个口彩,婚车自然也不例外。 相对而言,婚车的头车用白色或红色更好,因为白色有 “白头 偕老”的语意,红色则象征夫妻生活红红火火。 另外,婚车尽量不选择两厢车,避免“有始无终”、“有头无尾”。 用奔驰做头车的话,尾车则不宜用桑塔纳,因为会有“奔丧”的谐音。 车标如果有吉祥的含义更好,比如荣威的双狮车标,就有 “ 成 双成对”的美意, 而标致的单狮难免有“孤寡”的意思。 婚车一开到路上, 就必定要引来路人的评头论足。 所以, 现在的新人越来越在意婚车的“舆 论效应”——不求最贵,但求最新。于是,我们就看到了层出不穷的“新、 奇”婚车。 “新”——用新上市的车型来做婚车,可以有效地避免亲友和路 人的“视觉疲劳”。 最近有新人用荣威 750 开道, 吸引来不少路人的抓拍。 可见,英伦味十足的荣威的确相当唬人,即新鲜又气派。 “奇”——敞篷、加长、越野、 mini……这些车已经不够 “奇怪” 了。 如今的新人怪招多多: 军用车队、 公交车队、 自行车队、 人力车队…… 即便车型过于平民, 也可以用数量来造势, 由车友慷慨相助而成的奇瑞、 POLO 婚车队开在马路上亦十分风光。 车祸再所难免。 但是如果婚车在途中出事故, 甚至喜事变丧事, 那简直是不可承受的痛。为了保证婚礼顺顺利利,新人不管选什么车, 安全都不能忽略。 像这样有过“前科”的车型,恐怕准备办喜事的新人们还是选择
Ê =!TÕ½ÃOy C $# \ $ Í îï p p Ê , C E 8 =F M D H TJ M BN TJ ` M] C I I C KE] C E TJ M6 ] D KB ] 6 J N TJ J M KI N 6 KI J 6 7 7 M J
0 U !F % O }ÂpØyDE$A } ® V y r Z[ \6 E $}Â h Õ ò Z[ O yæ Z ô O y ¬Ny 9 ÙCz& 1 :99> y ,?- Ê Í s ±& Ê : }òé!O ( £Z U³z ,e L vÒy ¿ h T Õ \ :% \ " %+% \ %+% \ % q : D ¿ h T Õ% ä z > 2 q 8 , %+% 7 ½_ 7 :% 7 " %+% 7 5 ) 6 h Õ ò é ! O y Z[ z & % £Z¹TÕ \ : § 2 q½_ 7 56 Cy Z[ z} T ( 5 %Ý ! ¨>ª0" < # :¯CyZ[z} T @ G( 5 T #H C E K" 7 # !A 7 F BC k " " F\ F !O 5 \6 k G9 "$#
!!"!#!$!% & "# '& $ ( % & ' ( ) * +& ,. / ( * 0 . & )* ) 123 & 4 5 6 7 8 "# ) 6 8 $ "9:9!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
67 ñK 8 Þ^ 9: ,¦§¨ ; !ö÷Òd
& $ (!!!!!!!!!!!!!GËÌ4! ôGå"hÕòSéy/wÄiê½Ãèk
0 M X (M !M !T )0 = ) % 7A 6 ] 6 J F B*! T F B/
@<
FA : 9$> % O A #6 @;> % A " :=< % ;$ 6 <: & \6 A 9 A? 1 :99> y ½ Ãi ¨>¼WËÌ y h Õ ò é ! O ( 1 :99> y , S -Ê% $Ê " À %{ h Õ ò é ! O ( ¦& ÂÊw9% p pCy DE ô à ¸ f ` g Í s±& ÂhÕòé!O y Õ òmO G Bò h Õ òTÕ*Í{y% Ì v% â < L T Õ ½ à O% O G ½ÃT¼Bò é ! O T Õ% Å T Õ T ÿ ïò l& ¨>Í E>% { T Õ ½ à O y ½ à T ?Ò TÕîï Ê& qCyîï J á t ï p p% wC TÕ½ÃO y ½ Ãi% $Ê = À¦& `p pC T Õ½ÃOy½Ãi}! C =$> \ 96 @;" P "" 6 P ! "##
!!ôGS é h þ ¹ G - § G õ ÕÖ )* < > ô G ¹3Áv¢y ý Wá U » À ¬Ny z q ô G y9+اTo w Ä µÞe® ô G å "SéOGBòé!Oy Z[ * w vÒy ; ý §áU5¼BÉTow§9+Ø hÕòé!OOG àé ! s y Õ " * à SéUyZ[ e L Ä µ® ¶·3 Z[ òl³ ¸ cETÁVôN à þ C st 0 õ âÁ é ! m±f4 ¥
/ \ M ^\ _ "*F & ] : *M " !T F B* !
ö ¹ h Õ ò Z[ à å" S é
Uy)á/( SW , á -ú 1 q GT h Õ ò S é®y½Ã¯ kJ á S m [\ <= = Q) B JySXZ[ ½ Ãè k q h Õ ò S é J á ½ à <= @ Q) l½ Ãè 0 q S é ®J á ½ à <= > )_`ja*½ÃhÕòZ[O <= ; q å "hÕòS é DuB J y å" ½ Ãè k < = < Q) \ ½ Ãq h Õ ò S é J á[\ <= $ ()¶H½Ãqå"hÕ ò S é J á[\ < = # Z: GT å" S é !"i ê / w ½ à @ Gi :9 ® nWå[\()ym : R å"hÕ ò S é ¹ üH ôyÒ» }  âÀ´µy\ï§v p Ø¾Ä ½ ÃWy " G æ å" h Õ ò S é Øü Ìvâ <ËÌ : R iq«½ÃèkJá[\ z Ê å" h Õ ò Séy)%µÍΩ @ * è k å qr ¥ / ½_yRX½_Sé òõ¦¼ª õ Y " ÎÍ q ô G¢F§9+Øy® O G p p h
* ::i "@< ßaÝOL1 ç [ )*+, -. $;= :;+,<= "99<* \)*+,< = "99<9":9"= ß a Ý HI O L2 Ñ Í P J + , "99$:9;; 9@ ? :9!AB?>C@("99# ? 9$ ? ": >?@( "99# ? &DEF GËÌ IRKST:#<: L @ MN
>ûýªý ` y; % È - ªýý ` å 4 '/ '4kú& ()æYý`! U¹ *
*
# "8 # !, 7 # "8 # "Y" 8 #
*
";#
"8 #A Y" 8 # m ¼ 0 U !, mýv¢E$7 mG½$ # & ý¶¿ÂijC& "F $#VÞ^K)ZÈo!D C KE ^D P â<OG E>ppyè k% q \ ï / ( := ) 1 :99> h Õ ò é ! %i J áAº% ËÌ ( Oy½Ãi& E2²ù0}! T X #H C E K" 7 # !A 7 !F B " " F\ F !O \6 9 "<#
" = @
" G¥¦\ 0U $ ^_ } : L ^\ } G y R ð" ß ¦ & I ] & $ }áõYgñ©_E$ }áGõ¥¦ I J c ] c J W _ } G ¥ / ?t òõ _ } G y R X M : M " }á M G õ ?t òõ M } ý ¶¿ > 0 ; i p 6 ] 6 J A C A ] J} á w ½ h Õ ò é ! O Z[E T F B* T F B/ & }áSéh Õ ò é ! O w ½ Z[ z $0 $ & ] J }áSé©_E ë_ ¸ L » í d µ $63 M ^ ^ ^ ^ ^ ^ " "M _ *F _ ! M @ "M _ !O _ >
性的“失明”为好.
杭州汽车出租
最近网上惊爆的“加长车”事件,就值得警醒:为了长面子,很 多人喜欢租借加长版的凯迪拉克或林肯,孰不知很多婚庆公司提供的加 长车都是自己拼接而成的,安全成极大隐患。 另外,本田雅阁也不是婚车的理想选择,曾经轰动一时的 “ 婚 礼门”事件,恐怕还是能让很多人记忆犹新:因为在碰撞中完全没能对 驾驶和乘坐人员起到保护作用,车身尽毁,一场本不致命的交通事故却 让两位新人撒手人间。
:
& M O ] = *M @ !T F B/ Gõ¥¦y?ñR"è $ M ^ M M c ] : "& I ] 6 ] *M : *& ] : *M " *T F B* $ M ^ M M c J = "& I J 6 J *M = *& J = *M @ *T F B/