低压变频器simulink仿真源代码
SIMULINK仿真
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
建立使能子系统的方法是:打开Simulink模块库中的Ports & Subsystems模块库,将Enable模块复制到子系统模型 中,则系统的图标发生了变化。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
U (s)
Kp
Ki s
Kd s
matlabsimulink电力系统建模与仿真源代码

matlabsimulink电力系统建模与仿真源代码Matlab Simulink是一款功能强大的系统级建模和仿真工具,用于电力系统建模与仿真。
它极大地简化了系统级建模和仿真的流程,使得系统级建模和仿真不再是一项困难和耗时的工作。
这篇文章将介绍如何使用Matlab Simulink来进行电力系统建模与仿真,并给出相应的源代码。
1. 建立电力系统首先,我们需要建立电力系统。
可以通过添加各种组件来建立电力系统,比如发电机、变压器、传输线等。
在Matlab Simulink中,这些组件可以通过搜索库获得。
2. 设置模型参数在建立电力系统之后,我们需要设置模型的参数。
这些参数包括电压、电流、频率、相位等等。
根据不同的模型和实验条件,模型参数可能有所不同。
3. 添加输入和输出接下来,我们需要添加输入和输出。
这些输入和输出可能是电流、电压、功率等等。
在添加输入和输出之后,我们需要定义它们的格式,并将它们与相应的模型参数相连。
4. 编写MATLAB函数在建立电力系统之后,我们需要编写MATLAB函数。
这些函数可能包括方程、差分方程或其他类型的方程。
这些函数可以用于计算电力系统的各种参数,比如电阻、电感、电容等等。
5. 编写电力系统仿真源代码最后,我们需要编写电力系统仿真源代码。
这些代码将根据设置的模型参数和输入输出来模拟电力系统的各种行为。
在编写电力系统仿真源代码之前,我们需要先了解系统的行为和响应。
以下是一个简单的Matlab Simulink电力系统建模与仿真源代码实例:```% Example: Simulate a simple electrical systemclc;time = 0:0.01:10; % Time vectorV1 = 2*sin(2*pi*60*time); % AC voltage waveformR = 10; % ResistanceL = 1; % InductanceC = 0.01; % CapacitanceI = zeros(size(time)); % CurrentQ = zeros(size(time)); % Capacitor voltage% Simulate systemfor i=2:length(time)dt = time(i) - time(i-1);V2 = V1(i) - I(i-1)*R;I(i) = I(i-1) - dt*(R*I(i-1)/L + Q(i-1)/L - V2/L);Q(i) = Q(i-1) + dt*(I(i-1) - Q(i-1)/(R*C));end% Plot Resultsfigure;subplot(2,1,1);plot(time,V1,'r',time,I,'b');xlabel('Time (s)'); ylabel('V (V), I (A)');title('Voltage and Current vs. Time');legend('Voltage','Current');subplot(2,1,2);plot(time,Q,'g');xlabel('Time(s)'); ylabel('Q(C,V) (Coulombs, Volts)');title('Charge and Voltage vs. Time');legend('Charge');```以上是一个简单的电力系统建模和仿真源代码实例,包括电压、电流、电感、电容等基本元素。
基于MATLAB_Simulink的变频调速系统建模与仿真1
第 5 卷第 4 期
部绍明, 等: 基于 M A T L A B/ Simulink 的变频调速系统建模与仿真
61
子 Rr = 0. 816 , 转子侧电感 L lr = 0. 002 m H , 互 感 L m= 0. 069 m H ; 转动惯量 J = 0. 19 kg m; 逆
变器直流电源为 510 V . 定子绕组自感 L s = Lm + Lls = 0. 069+ 0. 002 = 0. 071 mH ; 转子 绕组自感 Lr = L m+ L lr = 0. 069+ 0. 002= 0. 071 mH ; 漏磁
图 4 滞环脉冲发生 器结构 Fig. 4 T he st ructur e of the hysteresis pulse generato r
转子磁链电流模型使用在两相同步旋转坐标 系上按转子磁链定向的磁链模型, 模型结构如图 5 所示.
图 5 转子磁链电流模型结构 Fig. 5 T he st ructur e of the cur rent model of f lux r oto r
1 调速系统的工作原理
参考相关文献资料[ 7~ 9] , 本变频调速系统( 带 转矩内环的转速、磁链闭环矢量控制型) 采用如图 1 所示的电气原理图.
式中: i st 为定子转矩分量; r 为转子全磁链; L m 为 互感; np 为电机的极对数; L r 为转子绕组自感.
电路中的磁链调节器 ApsiR 用于对电动机定 子磁链的控制, 并设置了电流变换 和磁链观测环 节. AT R 和 ApsiR 的输出分别是定子电流的转矩 分量 i*st 和励磁分量 i*sm. i*st 和 i*sm经过 2r/ 3s 变换后得 到三相定子电流的给定值 i*sA , i*sB , i*sC , 并通过电流滞 环控制 PWM 逆变器控制电动机定子的三相电流.
SIMULINK高级技术_程序代码

方式二:在计算速度可以忍受的范围内,可以不必介意代数环问难;
方式三:对代数环采取代数约束; 方式四:切断模型中的代数环。
技术凝聚实力 专业创新出版
火龙果整理
23.4 高级积分器
在SIMULINK的Continues库中有一个非常重要的模块就是积分模块 Integrator,其功能是对输入信号进行积分,并输出当前时间步上的积分 值。这里用一个等式来说明:,其中,y时模块的输出,u时输入,是初始 时刻,t是当前时刻,是初始状态。 SIMULINK可以用许多中不同的数值积分方法来计算积分模块的输出,每种 方法在特定的环境下都有各自的优缺点,SIMULINK将积分模块看作一个具 有状态和输出的动态系统,他的输入时状态的时间导数。如下式所示:, 用户可以在Simulation Parameters对话框中选择合适的求解器算法,所 选择的求解器会用当前时刻的输入值和前一时刻时间步的状态值来计算当 前时间步上积分模块的输出值。为了支持这种计算模式,积分模块必须保 存当前时间步的输出值以备计算下一时间步的输入值,同时,模块也提供 给求解器一个初始条件,用来在仿真开始执行时计算模块的初始状态,默 认情况下值为0。模块参数对话框也允许用户为初始条件指定其他值,或 者在模块中创建一个初始值输入端口。
(1)改写微分方程为:。
(2)选择模块、构建模型。在微分问题中,往往是通过积分来解 决微分问题,基本思路是:经过积分得到,再经过积分得到,而可 由(1)中的代数运算得到。
技术凝聚实力 专业创新出版
火龙果整理
23.2 过零检测
在运行动态系统仿真时,SIMULINK利用过零检 测来检查每个时间步上系统状态变量的不连续 性,如果SIMULINK在当前工作时刻检测到不连 续性,它会确定不连续性状态出现的准确时刻, 并在该时刻的前后选取另外的时间步来求取仿 真结果。
Simulink自动代码生成_01
2.4.8 Code Generation-Code Placetnem子标签页面的设置
Code Placetnem子标签提供的选项将影响生成代码的文件组织方式和数据存储方式及 头文件包含的分隔符选择等,其页面如下图所示:
2.4.8 Code Generation-Code Placetnem子标签页面的设置
2.2 Optimization页面的设置
当模型中使用参数变量,如Gain模块的增益值,在生成代码时,如果希望使用该参数 的值直接展开到代码中,就需要设置参数内联选项,如下图所示框中选项:
2.2 Optimization页面的设置 当模型中使用参数变量,如Gain模块的增益值,在生成代码时,
如果希望使用该参数的值直接展开到代码中,就需要设置参数内联 选项,如下图所示框中选项:Inline parameters选项决定是否将参 数内联到代码中去。勾选此选项后,代码生成时模型的参数将以常 数方式直接生成到代码逻辑中,不再以一个参数变量的形式生成。 当模型中的参数需要作为实时可调的参数生成到代码中时,不勾选 Inline parameter,参数将作为变量生成;如果不需要实时调整参数, 可以选择节省存储空间的方式,勾选Inline parameter,将参数以数 值常数的形式生成到代码中。
另外一个关键的设置选项是控制整个代码生成过程的系统目标文件 System Target File,ert. tlc文件是Embedded Coder提供的能够生成专门 用于嵌入式系统C代码的系统目标文件。在Code Generation页面中,单 击下图图(2)所示右上角Browse按钮可以弹出对话框以选择系统目标 文件。
2.3 Hardware Implenmatation页面的设置
变频调速矢量控制策略与MATLAB仿真

变频调速矢量控制策略与MATLAB仿真变频调速矢量控制(Variable Frequency Variable Speed Vector Control,简称V/F V/S Vector Control)是一种在电机调速系统中应用较为广泛的控制策略,能够实现电机的高效能运行。
本文将介绍V/F V/S矢量控制策略的原理,并使用MATLAB进行仿真。
一、V/FV/S矢量控制原理V/FV/S矢量控制通过改变电机的输电电压和频率来实现对电机转速的控制。
其基本原理是通过调整电机供电电压的频率和幅值,使得电机的磁场旋转速度保持与转子的旋转速度同步,从而实现对电机转速的精确控制。
1.电机模型在V/FV/S矢量控制中,电机被建模为一个非线性动态系统,其中转子速度、电机电流和转矩是相互关联的。
电机模型一般包含电枢电流方程、机械方程和电磁方程等。
2.矢量控制策略通过将电压和电流转换为矢量形式进行控制,可以快速响应电机转速的变化。
矢量控制策略分为定子矢量控制和转子矢量控制两种。
(1)定子矢量控制:定子矢量控制是在电机定子坐标系下进行控制,通过控制定子磁场的大小和方向来实现对电机转速的控制。
其中,定子矢量控制常用的方法是定子电流矢量环控制,通过控制定子电流的大小和相位来实现对电机的控制。
(2)转子矢量控制:转子矢量控制是在电机转子坐标系下进行控制,通过控制转子磁场的方向来实现对电机转速的控制。
其中,转子矢量控制常用的方法是转子磁链矢量环控制,通过调整转子磁链的大小和相位来实现对电机的控制。
3.控制算法V/FV/S矢量控制通过控制电压和频率来实现电机转速的精确控制。
其中,控制算法是关键。
常用的控制算法包括PID控制、模糊控制和神经网络控制等。
这些算法可以通过对电机模型的建模和仿真来进行参数优化,以实现更好的性能。
二、MATLAB仿真实现MATLAB是一种非常常用的工具,可以用于电机控制系统的建模和仿真。
下面将使用MATLAB对V/FV/S矢量控制策略进行仿真。
simulinkmatlab仿真环境教程(精)
simulink matlab仿真环境教程Simulink是面向框图的仿真软件。
演示一个Simulink的简单程序【例1.1】创建一个正弦信号的仿真模型。
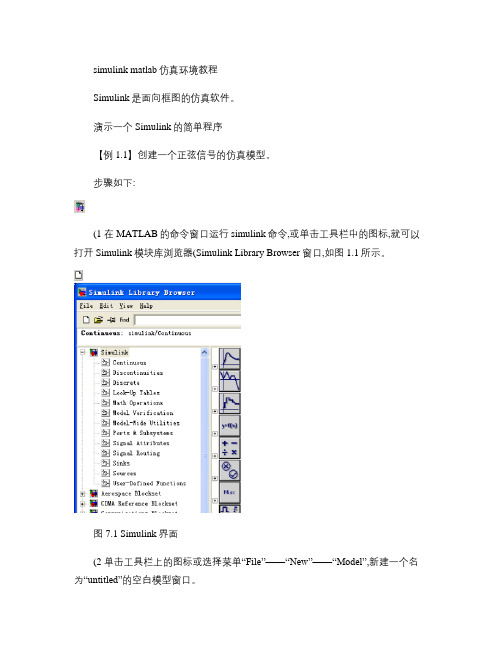
步骤如下:(1 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser 窗口,如图1.1所示。
图7.1 Simulink界面(2 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source,或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号,将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器拖放到“untitled”窗口中。
(6 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
基于f28335的simulink代码生成
基于f28335的Simulink代码生成概述基于f28335的Simulink代码生成是一种将Simulink模型转换为C/C++代码,并在TI C2000系列微控制器f28335上运行的方法。
本文将介绍如何使用该方法进行代码生成,并详细解释其实现原理和应用场景。
Simulink简介Simulink是一种基于模型的设计和仿真环境,广泛应用于自动控制、信号处理和嵌入式系统开发等领域。
通过在Simulink中建立模型,用户可以使用图形化界面快速搭建系统结构,并通过连接各个模块来定义系统行为。
Simulink还提供了丰富的工具和库函数,方便用户进行仿真、验证和优化。
f28335微控制器简介TI C2000系列微控制器是德州仪器(Texas Instruments)推出的一款高性能数字信号处理器(DSP)微控制器系列。
其中,f28335是该系列中功能最为强大且广泛应用的型号之一。
f28335具有高性能、低功耗和丰富的外设接口,适用于工业自动化、电力电子、电机控制等领域。
Simulink代码生成工具Simulink提供了一种名为Embedded Coder的工具,用于将Simulink模型转换为C/C++代码。
Embedded Coder支持多种目标平台,包括f28335微控制器。
通过使用Embedded Coder,用户可以将Simulink模型直接生成可在f28335上运行的代码。
基于f28335的Simulink代码生成流程1.在Simulink中建立模型:首先,用户需要在Simulink中建立一个模型来描述系统结构和行为。
可以使用Simulink提供的各种库函数和模块来搭建系统。
2.配置模型参数:在建立好模型后,用户需要配置一些参数,以指定代码生成的目标平台为f28335微控制器。
这些参数包括编译器选项、目标设备选项等。
3.生成代码:配置完成后,用户可以使用Embedded Coder工具将Simulink模型转换为C/C++代码。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
低压变频器simulink仿真源代码
一、简介
低压变频器是一种常见的电力调节设备,其主要作用是将交流电源的
频率和电压转换为可控的输出,以满足各种不同负载的需求。
在实际
应用中,低压变频器通常需要进行仿真分析,以确保其性能和稳定性。
本文将介绍低压变频器Simulink仿真源代码的编写方法和注意事项。
二、Simulink仿真环境
Simulink是MATLAB软件中的一个图形化模拟工具,可以用于建立
和仿真各种复杂系统。
在使用Simulink进行低压变频器仿真时,需要先创建一个新模型,并添加所需的模块和参数。
三、低压变频器基本原理
低压变频器主要由三个部分组成:整流桥、滤波电路和逆变桥。
整流
桥将交流电源转换为直流电源,滤波电路对直流电源进行平滑处理,
逆变桥则将平滑后的直流电源转换为可控的交流输出。
四、低压变频器Simulink模型搭建
1. 整流桥模块
整流桥模块可以使用Simulink中提供的“Three-Phase Full-Wave Rectifier”模块实现。
该模块需要设置输入电压、输出电流和负载阻
抗等参数。
2. 滤波电路模块
滤波电路模块可以使用Simulink中提供的“RLC Branch”模块实现。
该模块需要设置电感、电容和负载阻抗等参数。
3. 逆变桥模块
逆变桥模块可以使用Simulink中提供的“Three-Phase Inverter”模块实现。
该模块需要设置输入直流电压、输出交流电压和负载阻抗等
参数。
4. 整个低压变频器系统搭建
将上述三个部分按照顺序连接起来,即可得到完整的低压变频器Simulink仿真模型。
五、仿真结果分析
在完成低压变频器Simulink仿真后,可以对仿真结果进行分析,以评估其性能和稳定性。
主要包括以下几个方面:
1. 输出波形分析
通过观察输出波形,可以了解低压变频器的输出频率、幅值和相位等信息。
同时还可以检测是否存在失调或谐波等问题。
2. 稳态响应分析
稳态响应是指系统在稳定状态下对输入信号的响应情况。
通过分析稳态响应,可以了解系统的稳定性和鲁棒性。
3. 动态响应分析
动态响应是指系统对瞬时变化的响应情况。
通过分析动态响应,可以了解系统的动态特性和响应速度等信息。
六、注意事项
在进行低压变频器Simulink仿真时,需要注意以下几个方面:
1. 模型参数设置
模型参数设置是影响仿真结果的关键因素之一。
需要根据实际情况合
理设置各个模块的参数。
2. 仿真时间设置
仿真时间设置需要根据实际需求进行调整。
如果仿真时间过短,则可
能无法得到准确的结果;如果仿真时间过长,则可能会浪费计算资源。
3. 信号采样率设置
信号采样率设置需要根据信号频率和精度要求进行调整。
如果采样率
过低,则可能会出现失真或误差;如果采样率过高,则可能会浪费计
算资源。
4. 仿真结果分析
在进行仿真结果分析时,需要考虑多种因素,并结合实际情况进行综
合评估。
七、总结
低压变频器Simulink仿真源代码的编写方法和注意事项已经介绍完毕。
通过Simulink仿真,可以有效地评估低压变频器的性能和稳定性,为实际应用提供参考依据。
同时,需要注意模型参数设置、仿真时间设置、信号采样率设置和仿真结果分析等方面的问题。