机器人学导论克雷格作业答案
(完整word版)机器人学导论复习题及参考答案(word文档良心出品)
西安高学考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
机器人学导论复习题及参考 答案
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
机器人学导论第4版课后答案第五章

机器人学导论第4版课后答案第五章在机械传动的系统中,摩擦是必不可少的。
利用这种摩擦进行制动器运动和驱动传动,可使机械传动系统中的齿轮保持不变。
此外,通过磨擦还可产生机械震动和压力。
如果使驱动元件和传动件在轴上接触而摩擦时产生了热量,则会引起零部件上的油质过氧化,同时因摩擦带来的热量也会被传递到空气中去,这就是所谓的油氧化反应。
油氧化反应发生时产生各种化学作用和物理效应,如:油脂氧化、氧自由基分解以及其他一些化学反应。
为了降低能源消耗,人们就利用电磁铁等辅助设备进行电机和直流电弧的电磁场传播及热能的传递。
同时使用电动机带动机械装置实现制动与转动(用滚动轴承代替齿轮驱动机械装置)、滑动变速等过程。
(1)润滑在机械传动系统中的作用润滑是机械传动系统得以正常运行和保证精度的重要保证,也是重要的节能措施。
在机械传动系统中,一般可分为两种类型:①摩擦式:利用轴承上的油脂润滑滚动轴承运转的方法;②滑动式:利用滑动轴承外圈与滚珠之间的摩擦力来驱动运转。
摩擦式与滑动轴承摩擦力大,但传动精度高。
滑动式以滑动轴承为轴心轴向进行传动,由于摩擦产生的热量可传递到空气中去。
滑动式利用液体润滑元件代替了滚动轴承;滑动式同时也由润滑元件代替了滑动轴承和滚珠轴承。
(2)根据润滑与传热的关系,将滑动变速法分为()。
A.摩擦-传热:利用润滑系统中摩擦材料不产生热量,仅在零件表面形成均匀温润的油膜以增加润滑强度。
B.电弧摩擦:利用电弧来能量传递。
C.电磁力摩擦:利用电磁力来改变电动机的转速使其不停转动(转)。
D.机械滑动变速法:利用机械滑动来改变电动机和负载之间的转速。
【答案】 B 【解析】根据润滑与传热关系,将滑动变速法分为摩擦-传热-滚动-制动-滑动变速法)。
故本题选 B.。
本题中轴承润滑与传热均起到传热传质等作用,因此不属于滑动变速法。
(3)下面我们来具体介绍一下摩擦原理中的摩擦现象是怎样发展来的:早在18世纪,英国天文学家便发现了太阳系的中心——日心在东偏南方向上移动得很快的现象,这被认为是太阳系诞生时一个重要的物理现象。
机器人学导论克雷格作业答案

2.1 soluti on:Accord ing to the equati on of pure tran siti on tran sformatio n,the new point2.3 soluti on:According to the constraint equations:Thus,the matrix should be like this:Solutio n:P Xcos 0 sin P n 片= : 010 P ° P Zsin0 cosP a2.7 Solutio n:According to the equation of pure rotation transformation , the new coord inates are as follows:10 02 2J 丄2二Rewrot(x,45) P 03 22 42 02 2 7「2 2222.9 Solutio n:Acording to the equations for the combined transformations ,the newcoord inates are as follows:0 1 0 0 5 1 0 0 0 5 1 A" r, B 1 0 0 0 3 0 0 1 0 3 10 P Rot(z,90 “)Trans(5,3,6) Rot(x,90?) P0 1 0 6 0 1 0 0 4 90 0 0 1 1 0 0 0 1 1 1Tran sformati ons relative to the reference frameTran sformati ons relative to the curre nt frame2.10BA P=Tra ns(5,3,6)Rot(x,90)Rot(a,90) PG 0 0 G <1 0 0 0> 「0-1 0 5 厂2 ‘0 10 3 0 0-10 10 0 0 3^0016^ ^0 10 0^ ^0 0 10^5 0 0 0 1 0 0 0 1 0 0 0 1 12-2812.12<^0.527 0.369 -0.766 -0.601、-1T1 = -0.574 0.819 0 -2.9470.628 0.439 0.643 -5.38厂0.92 0 -0.39 -3.8八-1T2 = 0 1 0 -60.39 0 0.92 -3.79丿0 0 0 12.14a) For spherical coord in ates we have (for posih on )1) r • cos 丫・sin [3= 3.13752) r • sin 丫・sin 3二2.1953) r • cos 3 二3.214I) Assuming sin p is posihve, from a and Y=35°from b and c — 3=50°unitsfrom c — r=5II) If sin 3were negative. ThenunitsSi nee orie ntati on is not specified, no more in formati on is available to check the results.b) For case I, substifate corresponding values of sin p , cos© S"Y COS YY=35°3=50 r=5and r in sperical coord in ates to get:3.1375、阿5265-0.5735 0.6275Tsph(r R Y=Tsph(35,50,5)= 0.3687 0.819 0.439 2.195-0.766 0 0.6428 3.214丿0 0 0 12.16Solutio n:Accord ing to the equati ons give n in the text book, we can get the Euler an gles as follows:Which lead to :2.18Solutio n:Si nee the hand will be placed on the object, we can obta in this:Thus:0 0 1 510 0 1U T H U T R0 10 00 0 0 1No,it can'.If so,the element at the position of the third row and the second column should be O.However, it is'.x=5,y=1,z=0Accord ing to the equati ons of the euler an gles:arctan2( a y , a x)orarctan2(a y,a x) O「or180arctan2( n x S n y C , o x S o y C ) 270or90;arctan2(a x C a y S ,a z) 270*or90*'2.21⑻(b)# 0 d a a 0-1 打0 01-2 □0 180 2-H □0 0(C )(d)1 0 0 00 1 0 00 0 1 d1d20 0 0 1C2 S2 0 d4C2 S2 C2 0 d4S2 0 0 1 0 0 0 0 1U T H U T°O T H U T O A I A2A3 2.22C1 Si 0 d a C1S1 C| 0 d a Si0 0 1 00 0 0 1C3 S3 0 0S3 C3 0 00 0 1 d50 0 0 1⑻(b)# 0 d a a 0-1 □+900 0 90 1-2 0 E 0 -90 =3-H 0 I3 0 0 (c)(d)2.23S1 0 C i 0C i 0 Si 00 1 0 00 0 0 1|10 0 1100 1 00 1 0 120 丄I A2! |1 0 0 0 01 0 0 0 0 1 13 k 0 0 丄凶=U T H T O°T H T0A1A2 A3A4LAI⑻1dfrrzrl>(b)# 0 d a a1 打0 0 902 □窗囲0 4 □0 1 -90(C)囚二1 0 0 00 0 1 00 1 0 00 0 0 10.707 0.707 0 10.610.707 0.707 0 10.610 0 1 60 0 0 1A2 囚二|10 0 100 1 00 1 0 00 0 丄(d) 1 0 0 0 0 0 1 0 0 1 0 18 0 0 0 1区]=0.707 0 0.707 00.707 0 0.707 00 1 0 00 0 0 1囲=|10 0 00 1 0 00 0 1 5A 0 0 丄1 0 0 1.4140 1 0 60 0 1 190 0 0 1。
机器人学导论第三章参考答案
。
i
αi-1
ai-1
di
θi
1
0
0
0
θ1
2
-90
0
d20390来自00θ3
题3.17[15]建立图3-37中的三连杆机器人的连杆坐标系。
题3.18[15]建立图3-38中的三连杆机器人的连杆坐标系。
题3.19[15]建立图3-39中的三连杆机器人的连杆坐标系。
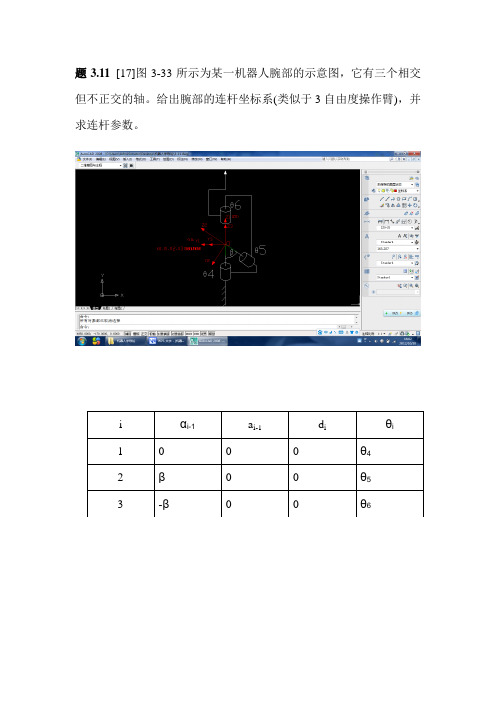
题3.11[17]图3-33所示为某一机器人腕部的示意图,它有三个相交但不正交的轴。给出腕部的连杆坐标系(类似于3自由度操作臂),并求连杆参数。
i
αi-1
ai-1
di
θi
1
0
0
0
θ4
2
β
0
0
θ5
3
-β
0
0
θ6
题3.13[15]建立图3-34所示的5自由度操作臂的连杆坐标系。
题3.15[15]建立图3-35中的3自由度操作臂的连杆坐标系。
题3.20[15]建立图3-40中的三连杆机器人的连杆坐标系。
题3.21[15]建立图3-41中的三连杆机器人的连杆坐标系。
题3.22[18]建立图3-42中P3R机器人的连杆坐标系。在确定坐标系的布局后,确定d2、d3和a2的符号。
d2为负,d3为正,a2为正
机器人学导论复习试题和参考答案解析

机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:控制:13.压电元件:14.图像锐化:15.隶属函数:网络:17.脱机编程::二、简答题:1.机器人学主要包含哪些研究内容2.机器人常用的机身和臂部的配置型式有哪些3.拉格朗日运动方程式的一般表示形式与各变量含义4.机器人控制系统的基本单元有哪些5.直流电机的额定值有哪些6.常见的机器人外部传感器有哪些7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成9.为什么要做图像的预处理机器视觉常用的预处理步骤有哪些10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类12.仿人机器人的关键技术有哪些三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3R机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。
3.如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x,y},试求其关节旋转变量θ1和θ2.P4.如图所示两自由度机械手在如图位置时(θ1= 0 , θ2=π/2),生成手爪力F A= [ f x0 ]T或F B= [ 0f y ]T。
机器人学导论复习题及参考 答案
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
机器人学导论作业答案
机器人学导论作业答案作业一一、问答题1.答:机器人的主要应用场合有:(1) 恶劣的工作环境和危险工作;(2) 在特殊作业场合进行极限作业;(3) 自动化生产领域;(4) 农业生产;(5) 军事应用。
2.答:工业机器人(英语:industrial robot。
简称IR)是广泛适用的能够自主动作,且多轴联动的机械设备。
它们在必要情况下配备有传感器,其动作步骤包括灵活的转动都是可编程控制的(即在工作过程中,无需任何外力的干预)。
它们通常配备有机械手、刀具或其他可装配的的加工工具,以及能够执行搬运操作与加工制造的任务。
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
3.答:科幻作家阿西莫夫机器人三原则:(1) 不伤害人类;(2) 在原则下服从人给出的命令;(3) 在与上两个原则不矛盾的前提下保护自身。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
4.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4) 机器人动力学;(5) 机器人控制技术;(6) 机器人传感器;(7) 机器人语言。
5.答:按几何结构分:(1) 直角坐标式机器人;(2) 圆柱坐标式机器人;(3) 球面坐标式机器人;(4) 关节式球面坐标机器人。
6.答:通常由四个相互作用的部分组成:执行机构、驱动单元、控制系统、智能系统。
7.答:一共需要5个:定位3个,放平稳2个。
8.答:机器人的主要特点有通用性、适应性。
决定通用性有两方面因素:机器人自由度;末端执行器的结构和操作能力。
9.答:工业机器人的手部是用来握持工件或工具的部件。
大部分的手部结构都是根据特定的工件要求而专门设计的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人学导论(克雷格)第二
章作业答案
■标准化文件发布号:(9456・EUATWK・MWUB・WUNN・INNUL-DDQTY-KII
2.1 solution:
According to the equation of pure transition transformation^he new point after transition is as follows:
2.3 solution:
According to the constraint equations: 〃 • d = 0;〃 • o = 0;d • o = 0
n = 1
Thus,the matrix should be like this:
'o
0 -1 5"
0 -1 5" 1 0 0 3 or -1
0 0 3 0 -1 0
2 0 -1 0 2 0
1
_0
1
2.4
= Trans (d x , d y , ) x P ()ld
Solution:
Solution:
According to the equation of pure rotation transformation , the new coordinates are as follows:
2.9 Solution:
Acording to the equations for the combined transformations ,the new coordinates are as follows:
2.7
1
P new = rot(xA5 )xP = 0
V2
2
返
V2
2 .
7A /2
Transformations relative to the current frame 2.10
此T「ans(536)Rot(x,90)Rot(a,90) P
1
0_丁'1 '
0 3 10
0 4 9
1 1 1
0 -1
t
. 1 0
A P = Rot(z,90 )X Trans(5y3,6)x Rot(x.90°)x P= ° Q
0 0 Tran sformatio ns relative to the ref ere nee frame
(/O 5 1
0 10 3 0 0-1 0 10 0 0
0 10 0 0 0 10
0\Q 0
2.12
0. 0.369 -0.766 -0.601
Tl = 0.574 0.819 0 -2.947
0.6 28 0.439 0.643 -5.38
OJ0
0 0 -0.39 -3.82
0 -6
0.3 0.92 ・3.79
\0 0
2.14
a) For spherical coordinates we have (for posihon )
1)r cos y sin 0 二 3.1375
2)r sin ysin 0 二 2.195
3)r cosp = 3.214
I) Assuming sin P is posihve, from a and b —> y二35°
from b and c t 0二50°
units
II) If sin p were negative. Then
Y二35。
p=50°「二5 units
Since orientation is not specified, no more information is available to
check the results・ b) For case substifate corresp on ding values of sin0 , cos 色sin” cosy
and r in sperical coordinates to get:
0.5265 -0.5735 56275 3.1375
Tsph(r,P,Y)=Tsph(35,50,5)= 3687 0.819 0.439 2.195
-0.766 0 0.6428 3.214
2.16
Solution:
According to the equations given in the text book, we can get the Euler angles as follows:
①①=arctan 2(-a y, —a x )or arctan 2(a>., a x)
Which lead to :
①= 215 "35
②W = arctan 2(-qS① + n y C^-o x S①+o、C①)=0 orl 80
③0 = arctim2(“ C① + yS①,a.) =50 "-50
2.18
Soluti on: ©Since the hand will be placed on the object, we can obtain this:
Thus:
②No,it can't.
If so,the element at the position of the third row and the second column should be 0.However, it isn't.
③ x=5,y 二 1忆二 0
According to the equations of the euler angles:
①=arctan2(-ci,,—a v)or arctan2(g,a t) = 0 or\80
T = arctan 2(-n x S①+n v C^-o x S①+o、C①)=270。
皿
6 = arctan 2(yC① + a、.S0«.) = 270 or90
2.21
(b) #
e
d a a 0-1 q 0 £ 0 1-2
&2
£ 180 2-H
0、、
〃、
(c)
j 0 0 0
7】
0 d 3c \
0 1 0
A {=
q 0 心
0 0 1 4+d? 0
0 1 0 0 0 0 1
1 ■
(d)
T H^T O°T H^T O A X A2A3
2.22
⑻
c2 s2 0 d4c2
0 0-10
0 0 0 1 0
11
# e
d a a
0-1 q+90 0 0 90 1-2 0
/,
-90
二
3-H 0
0 0
(c)
j 0 0
"1 0 0
o'
A 2 0
1 0
人二
0 ~c \ 0 A 二
0 1 0 0
0 -1 0 l 2 0 1
0 0 0 0 1 h
0 0 0 1
0 0
1
0 0 0 1
(d)
IO
U T O =
10 0/,
0 5| 0 _$1
(b)
(c)
A}='1
1
o"
0 A2=
「0.707
0.707
-0.707
0.707
10.6f
10.61 去二
"1
1
1
0 0 -1 0 0 0 0 1 6 0 -1 0 0 _0 0 0 1 _ 0 0 0 1 0 0 0 1
■1 0 0 o-_ 0.707 0 0.707 0_'1 0 0 o-
0 0 -1 0 -0.707 0 0.707 0 0 1 0 0
A.=人二
r 0 1 0 18 J 0 -1 0 0 0 0 1 5
0 0 0 1 . 0 0 0 1. _0 0 0 1
(d)
"1 0 0 -1.414
Rqr 0 -1 0 6
0 0 -1 -19
_0 0 0 1
13。