康佳红外遥控编码
史上最全的红外遥控器编码协议
目录1)MIT-C8D8 (40k)2) MIT-C8D8(33K)3)SC50560-001,003P 4)M504625)M50119P-016)M50119L7)RECS808)M30049)LC7464M10)LC7461-C1311)IRT1250C5D6-01 12)Gemini-C6-A13)Gemini-C614) Gemini-C17(31.36K)-1 15)KONKA KK-Y261 16)PD6121G-F17)DATA-6BIT18)Custum-6BIT19)M9148-120)SC3010 RC-521) M50560-1(40K)22) SC50560-B123)C50560-002P24)M50119P-0125)M50119P-126)M50119P27)IRT1250C5D6-02 28)HTS-C5D6P29)Gemini-C1730)Gemini-C17 -231)data6bit-a32)data6bit-c33)X-Sat34)Philips RECS-8035)Philips RC-MM36)Philips RC-637)Philips RC-538)Sony SIRC39)Sharp40)Nokia NRC1741)NEC42)JVC43)ITT44)SAA3010 RC-5(36K)45)SAA3010 RC-5(38K)46)NEC2-E247) NEC-E348) RC-5x49) NEC1-X250) _pid:$006051) UPD1986C52) UPD1986C-A53) UPD1986C-C54) MV500-0155) MV500-0256) Zenith S101) MIT-C8D8(40K)MIT-C8D8(40K)是一种常见的红外遥控编码格式。
该格式出现在万能遥控器ZC-18A(600-917)中。
Features 基本特点1,8位地址码,8位数据码,结束码;2,脉宽调制方式(PWM);3,载波:40.0 KHZ;4,逻辑位时间长度是1.215ms或2.436 ms。
万能遥控器代码一览表
KONGQUE 011.016.023.024.025.033.040.041.043.124
快乐
KUAILE
016.025.033.053.056.079
乐华
ROWA
011.016.023.024.025.040.043.096.127
龙江
LONGJIANG 011.033.053.056.079
康力
KANGLI
027.012.019.025.026.028.030.031.033.120
康虹
KANGHONG 009.058.057
康立
KANGLI
016.023024.025.040.043.011.026.029.042.005
康艺
KANGYI
016.025.033.053.056.079.121
NANBAO
飞燕033.053.056.079…
FEIYANzM「.
新思达123ms',一
XINSIDA-
彩凌102-x.
CAILING
高路华
000.006.007.008.010.016.025.033.053.055.056.045.046.048.073.099
CONROWA
豁达特技032.001.017.047._一
011.025.016
松柏
SONGBA
016.025
三元
SANYUAN
003.011.016.018.023.024.025.040.043
三键
SANJIAN
033.053.056.079
泰山
TAISHAN
011.016.025.042.038.031.030.029.028.027
遥控器红外信号物理格式综述
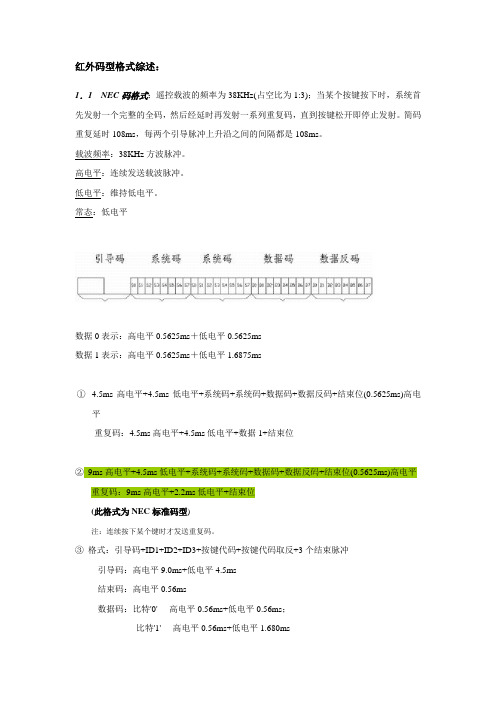
红外码型格式综述:1.1 NEC码格式:遥控载波的频率为38KHz(占空比为1:3);当某个按键按下时,系统首先发射一个完整的全码,然后经延时再发射一系列重复码,直到按键松开即停止发射。
简码重复延时108ms,每两个引导脉冲上升沿之间的间隔都是108ms。
载波频率:38KHz方波脉冲。
高电平:连续发送载波脉冲。
低电平:维持低电平。
常态:低电平数据0表示:高电平0.5625ms+低电平0.5625ms数据1表示:高电平0.5625ms+低电平1.6875ms① 4.5ms高电平+4.5ms低电平+系统码+系统码+数据码+数据反码+结束位(0.5625ms)高电平重复码:4.5ms高电平+4.5ms低电平+数据1+结束位②9ms高电平+4.5ms低电平+系统码+系统码+数据码+数据反码+结束位(0.5625ms)高电平重复码:9ms高电平+2.2ms低电平+结束位(此格式为NEC标准码型)注:连续按下某个键时才发送重复码。
③格式:引导码+ID1+ID2+ID3+按键代码+按键代码取反+3个结束脉冲引导码:高电平9.0ms+低电平4.5ms结束码:高电平0.56ms数据码:比特'0'----高电平0.56ms+低电平0.56ms;比特'1'----高电平0.56ms+低电平1.680ms连续按键:第一组波形同单次按键发送的物理基带波形,以后各组的波形为引导码+高电平0.6ms,重复发送,周期为108ms。
红外的解码实际是很简单的,红外编码由4组数据组成:1.用户识别码2.用户识别码(反吗)3.操作码4.操作码(反码)像在上面的例程中,没有对用户识别码的处理,只对操作码进行处理。
所有,只要同类型遥控器都能再我们开发箱上使用。
下面看看红外原理的相关介绍。
遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理。
【精品】电视机万能遥控器的代码
电视机万能遥控器的代码(RM-139)国内电视:长虹000。
008.009.091。
092.093。
010。
011.014。
016 。
026. 028。
033。
05 1.088。
100.157。
158。
159。
160。
161。
180。
181。
185.186.191。
192。
210。
211.212.229.230。
231。
232康佳011 。
017 .029。
032。
034.054.067。
069。
071.075。
076.077。
078。
07 9.080.7。
173.174.175.176.189。
201.202.203。
217.218.220。
226.267。
236创维011. 025。
033.045。
046。
060。
070.017.072。
073.074。
079.083.010.1 07。
108.109162163.164。
165。
166。
167.168。
169.177。
224。
225.235.246熊猫001.011。
016.021.022.023.024。
025.026.028.033.040。
043.053。
056. 009。
057。
058051。
061.062.073。
079。
089.091.124.125。
234.237。
238.239。
240.241.242.243。
244245247.248。
249。
250。
251TCL051.053.068。
071.073。
082.083。
084。
085.110.111。
170.171。
172。
178。
179.187.188.197.198.199.200。
233海尔103.112。
118。
119.150.151.152.153。
154。
155.156。
182.183。
184。
1 93.194.213。
228海信000.006.007.008.010.014 。
015. 025。
045.046。
103.105.107。
115。
1 16.128.129.130。
红外遥控编码格式及学习模式
红外遥控编码格式及学习模式红外遥控编码格式及学习模式1、编码格式现有的红外遥控包括两种方式:PWM(脉冲宽度调制)和PPM (脉冲位置调制)。
两种形式编码的代表分别为NEC和PHILIPS的RC-5、RC-6以及将来的RC-7。
PWM(脉冲宽度调制):以发射红外载波的占空比代表“0”和“1”。
为了节省能量,一般情况下,发射红外载波的时间固定,通过改变不发射载波的时间来改变占空比。
例如常用的电视遥控器,使用NEC upd6121,其“0”为载波发射0.56ms,不发射0.56ms;其“1”为载波发射0.56ms,不发射1.68ms;此外,为了解码的方便,还有引导码,upd6121的引导码为载波发射9ms,不发射4.5ms。
upd6121总共的编码长度为108ms。
但并不是所有的编码器都是如此,比如TOSHIBA的TC9012,其引导码为载波发射4.5ms,不发射4.5ms,其“0”为载波发射0.52ms,不发射0.52ms,其“1”为载波发射0.52ms,不发射1.04ms。
PPM(脉冲位置调制):以发射载波的位置表示“0”和“1”。
从发射载波到不发射载波为“0”,从不发射载波到发射载波为“1”。
其发射载波和不发射载波的时间相同,都为0.68ms,也就是每位的时间是固定的。
通过以上对编码的分析,可以得出以某种固定格式的“0”和“1”去学习红外,是很有可能不成功的。
即市面上所宣传的可以学习64位、128位必然是不可靠的。
另外,由于空调的状态远多于电视、音像,并且没有一个标准,所以各厂家都按自己的格式去做一个,造成差异更大。
比如:美的的遥控器采用PWM编码,码长120ms左右;新科的遥控器也采用PWM编码,码长500ms左右。
如此大的差异,如果按“位”的概念来讲,应该是多少位呢?64?128?显然都不可能包含如此长短不一的编码。
2、学习模式现在用来学习红外的CPU,无外乎以下几种:MCS-51系列、microchip pic16系列、winbond w741系列、holtek ht48系列以上的CPU由于价格便宜、使用量大,被广泛使用在遥控器上。
红外遥控器编码
关于红外遥控的一点资料整理最近发现家里遥控器老是弄混(唉,遥控器多了,也是一件麻烦事)。
如果有一种可对家中各种红外遥控器发射的控制信号进行识别、存储和再现的智能型红外遥控器,用这样一个遥控器控制家中所有电器该多好。
这就是大家称作的学习型红外遥控器。
于是,下了不少工夫查找了许多资料,对红外遥控也做了一点表面研究,现总结一点文档,与大家一同探讨(有不对之处,请大家指正!);另外由于本人愚顿还未开窍,还有部分东西想不太明白,在此也向专家们请教,请知道的老兄支点招,在此小弟先谢过了!!!一、红外遥控概述红外遥控系统一般都是由发射部分和接收部分组成。
1、发射部分的主要元件为红外发光二极管。
它实际上是一只特殊的发光二极管,由于其内部材料不同于普通发光二极管,因而在其两端施加一定电压时,它发出的便是红外线而不是可见光。
目前大量使用的红外发光二极管发出的红外线波长为940nm左右,外形与普通Φ5发光二极管相同,只是颜色不同。
2、接收部分主要元件是红外接收管,它是一种光敏二极管(实际上是三极管,基极为感光部分)。
在实际应用中要给红外接收二极管加反向偏压,它才能正常工作,亦即红外接收二极管在电路中应用时是反向运用,这样才能获得较高的灵敏度。
由于红外发光二极管的发射功率一般都较小(100mW左右),所以红外接收二极管接收到的信号比较微弱,因此就要增加高增益放大电路。
前些年常用μPC1373H、CX20106A等红外接收专用放大电路。
最近几年不论是业余制作还是正式产品,大多都采用成品红外接收头。
成品红外接收头的封装大致有两种:一种采用铁皮屏蔽;一种是塑料封装(如图中的HS0038),均有三只引脚,即电源正(VDD)、电源负(GND)和数据输出(VO或OUT)。
红外接收头的引脚排列因型号不同而不尽相同,可参考厂家的使用说明。
成品红外接收头的优点是不需要复杂的调试和外壳屏蔽,使用起来如同一只三极管,非常方便。
但在使用时注意成品红外接收头的载波频率。
6122编码格式,红外遥控的编码,载波38KHz
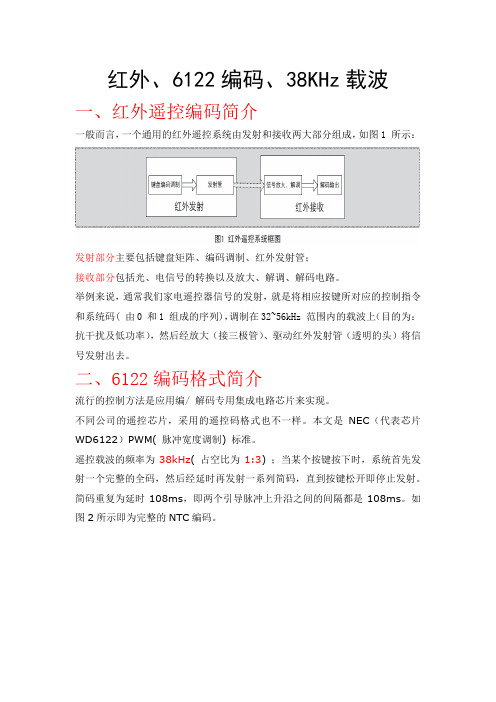
红外、6122编码、38KHz载波一、红外遥控编码简介一般而言,一个通用的红外遥控系统由发射和接收两大部分组成,如图1 所示:发射部分主要包括键盘矩阵、编码调制、红外发射管;接收部分包括光、电信号的转换以及放大、解调、解码电路。
举例来说,通常我们家电遥控器信号的发射,就是将相应按键所对应的控制指令和系统码( 由0 和1 组成的序列),调制在32~56kHz 范围内的载波上(目的为:抗干扰及低功率),然后经放大(接三极管)、驱动红外发射管(透明的头)将信号发射出去。
二、6122编码格式简介流行的控制方法是应用编/ 解码专用集成电路芯片来实现。
不同公司的遥控芯片,采用的遥控码格式也不一样。
本文是NEC(代表芯片WD6122)PWM( 脉冲宽度调制) 标准。
遥控载波的频率为38kHz( 占空比为1:3) ;当某个按键按下时,系统首先发射一个完整的全码,然后经延时再发射一系列简码,直到按键松开即停止发射。
简码重复为延时108ms,即两个引导脉冲上升沿之间的间隔都是108ms。
如图2所示即为完整的NTC编码。
正常发码:引导码(9ms+4.5ms)+用户编码+用户编码(或者是用户编码的反码)+键数据码+键数据反码+延时:将正常发码标识出来,从图中可以看出“0”和“1”的表示方法。
(不要问为什么是这样,规定!标准!高性能!)重复码:9ms+2.25ms+延时三、程序思想①低功耗。
写程序前要想到,没有用过的,可以新建工程只用sleep命令;②需要知道用户编码(客户码),每个键对应的编码,这些都是自己或者客户设定的;③高电平期间:用38KHz的方波表示,低电平期间:用低电平表示。
也就是说,高电平不是一直都是高,其实是38KHz的方波,这也是为什么上面②和③图中9ms高电平期间有方格。
(我用的公司自己的精简指令集,就不再上传。
需要的话,私信)四、电路做为波形的输出端,加三极管,放大。
下图为矩形键盘组成的按键,图中黑色二极管为红外发射管。
史上最全的红外遥控器编码协议

史上最全的红外遥控器编码协议⽬录1)MIT-C8D8 (40k)2) MIT-C8D8(33K)3)SC50560-001,003P 4)M504625)M50119P-016)M50119L7)RECS808)M30049)LC7464M10)LC7461-C1311)IRT1250C5D6-01 12)Gemini-C6-A13)Gemini-C614) Gemini-C17(31.36K)-1 15)KONKA KK-Y261 16)PD6121G-F 17)DATA-6BIT18)Custum-6BIT19)M9148-120)SC3010 RC-521) M50560-1(40K)22) SC50560-B123)C50560-002P24)M50119P-0125)M50119P-126)M50119P27)IRT1250C5D6-02 28)HTS-C5D6P29)Gemini-C1730)Gemini-C17 -231)data6bit-a32)data6bit-c33)X-Sat34)Philips RECS-8035)Philips RC-MM36)Philips RC-637)Philips RC-538)Sony SIRC39)Sharp40)Nokia NRC1741)NEC42)JVC43)ITT44)SAA3010 RC-5(36K)45)SAA3010 RC-5(38K)46)NEC2-E247) NEC-E348) RC-5x49) NEC1-X250) _pid:$006051) UPD1986C52) UPD1986C-A53) UPD1986C-C54) MV500-0155) MV500-0256) Zenith S101) MIT-C8D8(40K)MIT-C8D8(40K)是⼀种常见的红外遥控编码格式。
该格式出现在万能遥控器ZC-18A(600-917)中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/****************************************************************
程序名称: 将遥控接收头接收到的按键编码通过数码管显示出来
说明:stc12使用12M晶体
*****************************************************************/
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
////////////////////////////////////////////////
/*端口定义*/
#define sled_dm_port P0 /*定义LED显示的段码数据脚*/
#define sled_wm_port P2 /*定义LED显示的位码数据脚*/
/*定义数码管显示字符跟数字的对应数组关系*/
uchar mun_to_char[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
/* 0 1 2 3 4 5 6 7 8 9 a b c d e f */
/*定义需要点亮的数码管*/
uchar sled_bit_table[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
unsigned char irtime;//红外用全局变量
bit irpro_ok,irok;
unsigned char IRcord[2];
unsigned char irdata[18];
//////////////////////////////////////////////
void tim0_isr (void) interrupt 1 using 1//定时器0中断服务函数
{
irtime++;
}
void ex0_isr (void) interrupt 0 using 0//外部中断0服务函数
{
unsigned char i;
bit startflag;
if(startflag)
{
if(irtime<=32&&irtime>=28)//判断引导码即两个低电平在6毫秒左右即为开始接收信号根据不同红外协议更改引导码判定
{ i=0; irtime=0; }
irdata[i]=irtime;
irtime=0;
i++;
if(i==18){
irok=1;
i=0;
}}
else{
irtime=0;
startflag=1;
}}
void TIM0init(void)//定时器0初始化中断初始化
{
TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值
TH0=0x38;//reload value
TL0=0x38;//initial value 200um中断一次单片机和晶振不同需适当更改
ET0=1;//开中断
TR0=1;
IT0 = 1; // Configure interrupt 0 for falling edge on /INT0 (P3.2)
EX0 = 1; // Enable EX0 Interrupt
EA = 1;
}
void Ircordpro(void)//红外码值处理函数
{
uchar i, j, k=1;
uchar cord,value;
for(i=0;i<2;i++){//处理4个字节
for(j=1;j<=8;j++){ //处理1个字节8位
cord=irdata[k];
value=value>>1;
if(cord>12) value=value|0x80; //大于2.4ms为1 根据不同红外协议更改多少毫秒波形为1多少毫秒为0
k++;
}
IRcord[i]=value; //接收到的两个字节
value=0;
}
irpro_ok=1;//处理完毕标志位置1
}
/*1MS为单位的延时程序*/
void delay_1ms(uchar x)
{
uchar j;
while(x--){
for(j=0;j<114;j++)
{;}
}
}
void main(void)
{
uchar i;
uchar j;
uchar sled_disp_buff[8]={0xff,0xc0,0xc0,0xff,0xff,0xc0,0xc0,0xff}; /*寄存8位数码管数据*/ TIM0init();
delay_1ms(40);
while(1){//主循环
if(irok){
Ircordpro();
irok=0;
}
if(irpro_ok){
/*转换数据为显示字符*/
sled_disp_buff[1] = mun_to_char[IRcord[0]/0x10];
sled_disp_buff[2] = mun_to_char[IRcord[0]%0x10];
sled_disp_buff[5] = mun_to_char[IRcord[1]/0x10];
sled_disp_buff[6] = mun_to_char[IRcord[1]%0x10];
}
for(j=0;j<2;j++){ /*单次字符显示延时*/
for(i=0;i<8;i++){ /*扫描输出8位数码管*/
sled_wm_port = 0xff; /*关闭数码管显示*/
sled_dm_port = sled_disp_buff[i]; /*输出字符代码*/
sled_wm_port = sled_bit_table[i]; /*点亮第i个数码管*/
delay_1ms(1);
}
}
}
}。