51单片机模拟PWM输出占空比可调
51系列单片机输出PWM的两种方法
51系列单片机输出PWM的两种方法PWM(Pulse Width Modulation,脉宽调制)是一种常用的调制技术,通过改变信号的脉宽来控制输出电平的占空比。
在51系列的单片机中,常用的PWM输出方式有基于定时/计数器和软件实现两种方法。
一、基于定时/计数器的PWM输出方法:在51系列单片机中,内部有多个定时/计数器可用于实现PWM输出。
这些定时/计数器包括可编程定时/计数器T0、T1、T2和看门狗定时器。
1.T0定时/计数器:T0定时/计数器是最简单和最常用的PWM输出方式之一、通过配置T0定时/计数器的工作模式和重装值来实现PWM输出。
具体步骤如下:(1)选择T0的工作模式:将定时/计数器T0设置为工作在16位定时器模式,并使能PWM输出。
(2)设置T0的重装值:通过设定T0的装载值来定义PWM输出的周期。
(3)设置T0的计数初值:通过设定T0的计数初值来定义PWM输出的脉宽。
(4)启动T0定时/计数器:开启T0定时/计数器的时钟源,使其开始计数。
2.T1定时/计数器:T1定时/计数器相对于T0定时/计数器来说更加灵活,它具有更多的工作模式和功能,可以实现更复杂的PWM输出。
与T0定时/计数器类似,通过配置T1的工作模式、装载值和计数初值来实现PWM输出。
3.T2定时/计数器:T2定时/计数器在51系列单片机中的应用较少,但也可以用于实现PWM输出。
与T0和T1不同,T2定时/计数器没有独立的PWM输出功能,需要结合外部中断请求(INT)来实现PWM输出。
二、软件实现PWM输出方法:在51系列单片机中,除了利用定时/计数器来实现PWM输出外,还可以通过软件来实现PWM输出。
软件实现PWM的核心思想是利用延时控制来生成不同占空比的方波信号。
软件实现PWM输出的步骤如下:(1)设置IO口:选择一个适合的IO口,将其设置为输出模式。
(2)生成PWM信号:根据要求的PWM占空比,通过控制IO口的高低电平和延时的时间来生成PWM方波信号。
如何利用51单片机输出PWM波
如何利用51单片机输出PWM波1、理论知识2、程序及分析1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过复杂的实验此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms (1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间基准为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/ #include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振, PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
51单片机控制直流电机PWM调速

51单片机控制直流电机PWM调速
实验目的
1.掌握脉宽调制(PWM) 的方法。
2.用程序实现脉宽调制,并对直流电机进行调速控制。
实验设备
PC 机一台,单片机最小系统,驱动板、直流电机,连接导线等
实验原理
1.PWM (Pulse Width Modulation) 简称脉宽调制。
即,通过改变输出脉冲
的占空比,实现对直流电机进行调压调速控制。
2.实验线路图:
实验内容:
1. 利用实验室提供的单片机应用系统及直流电机驱动电路板,编制控制程序,实现直流电机PWM调速控制。
实验思考题
本实验中是通过改变脉冲的占空比,周期T 不变的方法来改变电机转速的,还有什么办法能改变电机的转速,应该怎么实现?
附件:
L298简介:
L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号。
如何利用51单片机输出PWM波

如何利用 51 单片机输出 PWM 波1、理论知识PWM 这个功能在飞思卡尔、等高档的单片机内部有专用的模块,STM32用此类芯片实现 功能时只需要通过设置相应的寄存器就可实现周期和占空比PWM的控制。
但是如果要用 51 单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法 是用定时器 T0来控制频率,定时器 T1 来控制占空比。
大致的的编程思路是这样的: T0 定时器中断让一个 I0 口输出高电平,在这个定时器T0 的中断当中起动定时器,而这个 T1是让IO 口输出低电平,这样改变T1定时器 T0 的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现的方法。
因为市面上的智能小车PWM所采用的电机大多数为TT 减速电机 ,通过反复的实验,此电机 最佳的工作频率为1000HZ (太高容易发生哨叫,太低电机容易发生抖动) ,所以下面以周期为()1ms1000HZ进行举例,要产生其它频率的波,程序中只需作简单修改即可。
PWM用一个定时器时(如定时器T0) , 首先你要确定 的周期T 和占空比,确定PWMD了这些以后,你可以用定时器产生一个时间基准 t ,比如定时器溢出 n 次的时间是 PWM 的高电平的时间, 则 D*T=n*t ,类似的可以求出 PWM 低电平时间需要多少个时间基准 n' 。
因为这里我们是产生周期为 1ms(1000HZ)的 PWM,所以可 设置中断的时间间隔为0.01ms, ,然后中断 100 次即为 1ms 。
在中断子程序内,可设置一个变量如 time,在中断子程序内, 有三条重要的语句 :1 、当 time>=100 时, time 清零 ( 此语句保证频率为1000HZ) , 、I/O 口输出2 当 time>n 时(n 应该在 0- 100 之间变化开 ) ,让单片相应的高电平 ,当 time<n 时,让单片相应的 I/O 口输出低电平,。
如何利用51单片机输出PWM波

如何利用51单片机输出PWM波1、理论知识2、程序及分析1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过复杂的实验此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms (1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间基准为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************//* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振,PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
基于51单片机的PWM直流电机调速

基于51单片机的PWM直流电机调速在现代社会,PWM直流电机已经成为各类机械设备不可或缺的动力源。
为了更好地控制电机的转速和输出功率,我们需要进行PWM调速操作。
本文将简要介绍如何基于51单片机实现PWM直流电机的调速。
一、PWM调速原理PWM调速是一种通过改变电机供电电压的占空比来调整电机转速和功率的方法。
当一个周期内高电平所占的时间比较短时,电机得到的平均电流和平均转矩也相应减小,电机的速度和功率也随之降低。
反之,当高电平所占的时间比较长时,电机得到的平均电流和平均转矩也相应增大,电机的速度和功率也随之提高。
因此,通过改变PWM信号的高电平占空比,可以实现直流电机的调速、调功等功能,极大地提高了电机的效率和可控性。
二、硬件电路搭建根据上述PWM调速原理,我们需要搭建一个控制板,将51单片机的PWM输出与直流电机相连。
具体电路如下:1、选择合适的电源供电,一般为12V/24V直流电源。
2、使用L298N模块作为直流电机驱动模块,将模块的电源接到电源供电上,将模块的IN1和IN2引脚分别接到51单片机的P1^0和P1^1引脚上,将直流电机的正负极分别接到模块的OUT1和OUT2引脚上。
3、将51单片机的P1^2引脚连接到一个脉冲宽度计波形滤波器(LCF)的输入端,并将输出端接到L298N模块的ENA引脚上。
4、调整脉冲宽度计波形滤波器的参数,以达到合理的PWM输出波形。
5、建立一个按键,将按键的一端接到51单片机的P3^2引脚上,将另一端接到单片机的地端。
6、根据需要进行其他接线。
三、软件程序设计根据上述硬件电路,我们需要进行相应的软件程序设计,以实现基于51单片机的PWM 直流电机调速。
以下是程序设计的主要步骤:1、在程序中定义需要使用的IO口。
2、调用定时器初始化程序,设置定时器的时钟频率、计数器值和工作方式等参数。
3、编写一个PWM输出函数,实现对PWM信号的输出。
4、编写一个ADC采样函数,读取ADC转换器的值,并根据采样值输出一定的PWM信号。
51单片机实现PWM波占空比可调
51单片机实现PWM波占空比可调单片机实现PWM波占空比可调的方法有很多种,下面将详细介绍一种常见的实现方式。
PWM(脉冲宽度调制)是一种常用的数字信号调制技术,可以通过改变脉冲的高电平时间来控制电平的占空比,从而实现对信号的调节。
在单片机中,可以使用定时器/计数器模块来生成PWM波,并通过改变计数器的值来调整占空比。
以AT89C51单片机为例,以下是实现PWM功能的步骤:1.设置定时器模式:选择合适的定时器模式来生成所需的PWM信号。
AT89C51单片机有定时器/计数器模块,可以选择模式2,该模式下定时器有自动重装载功能,能够方便地实现周期性的PWM波。
3. 设置PWM参数:根据需要调节的占空比,计算出所需的高电平时间和低电平时间。
通常,PWM波的高电平时间与低电平时间之和等于一个周期的时间(定时器的重装载值)。
例如,如果需要一个占空比为60%的PWM波,周期为20ms,则高电平时间为「20ms * 60% = 12ms」,低电平时间为「20ms - 12ms = 8ms」。
4.设置PWM引脚:选择一个合适的IO口作为PWM波的输出引脚,并在程序中设置该引脚为输出模式。
5.编写中断服务程序(ISR):针对定时器溢出中断(TOF)编写中断服务程序。
每当定时器溢出时,PWM波应该翻转输出引脚的电平,以实现所需的占空比。
6.初始化定时器和中断:在程序初始化阶段,将定时器设为所需的模式,设置中断向量表中的对应中断服务函数,并开启定时器中断。
7.主循环中设置占空比:在主循环中,通过改变定时器的初值来实现不同占空比的调节。
将计算得到的高电平时间和低电平时间分别赋值给定时器初值,即可实现占空比的调整。
通过上述步骤,我们可以实现占空比可调的PWM波。
在实际应用中,可以根据需要进行适当的优化和改进,例如增加输入口的设置,使得用户可以通过外部按键或旋钮来实时调整占空比,从而更加灵活地控制PWM波的输出。
总结:通过合适的定时器模式、初值设置和中断服务程序编写,配合适当的IO口配置和占空比计算,我们可以在单片机中实现占空比可调的PWM波。
关于51系列单片机利用定时器生成频率占空比可调的PWM
关于51系列单片机利用定时器生成频率占空比可调的PWM关于51系列单片机利用定时器生成频率占空比可调的PWM利用51单片机(无PWM模块)的软件模拟生成PWM,其频率和占空比都是可调的,在去年电子竞赛的时候一直没有自己尝试过,现在到了13的五月,要准备电子竞赛了,想把一些比较基础的东西自己亲手调一调。
在刘海波老师的单片机课,听过老师的方法生成PWM,当时就是一惊!自己从来没有这么做过。
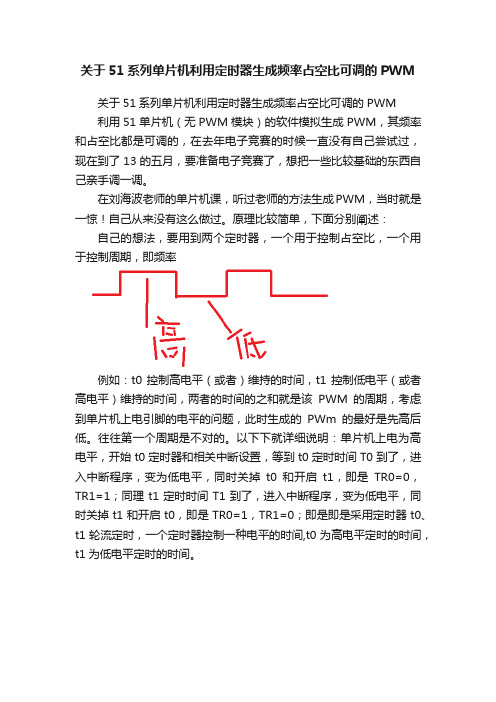
原理比较简单,下面分别阐述:自己的想法,要用到两个定时器,一个用于控制占空比,一个用于控制周期,即频率例如:t0控制高电平(或者)维持的时间,t1控制低电平(或者高电平)维持的时间,两者的时间的之和就是该PWM的周期,考虑到单片机上电引脚的电平的问题,此时生成的PWm的最好是先高后低。
往往第一个周期是不对的。
以下下就详细说明:单片机上电为高电平,开始t0定时器和相关中断设置,等到t0定时时间T0到了,进入中断程序,变为低电平,同时关掉t0和开启t1,即是TR0=0,TR1=1;同理t1定时时间T1到了,进入中断程序,变为低电平,同时关掉t1和开启t0,即是TR0=1,TR1=0;即是即是采用定时器t0、t1轮流定时,一个定时器控制一种电平的时间,t0为高电平定时的时间,t1为低电平定时的时间。
T= T0+ T1 q(占空比)= T0/T,注意:这个方法在系统的初始化的时候,必须将t0的定时器开启,否则,全部无法进行还有一种方法是开始t0定时器、t1定时器同时开启,其中t0定时的时间T0是高电平的时间,t1定时的时间T1是整个PWM的周期。
开始t0定时器、t1定时器同时开启,当然,T0的时间肯定要比T1的大,当t0定时的时间T0到了,进入t0中断程序,引脚又高电平变到低电平,同时将t0定时器关掉;当t1定时的时间T1到了,进入t1中断程序,引脚又低电平变到高电平,同时将t0定时器开启。
T= T1 q(占空比)= T0/T,以上两种方法都是利用两个定时器分别控制不同电平的时间,占用了51的几乎全部定时器,并且计算起来比较麻烦,要计算两个定时器的值,占空比的计算也相对困难。