过程装备控制技术及实际应用总复习
北京化工大学过程装备控制技术及应用期末复习重点计算题
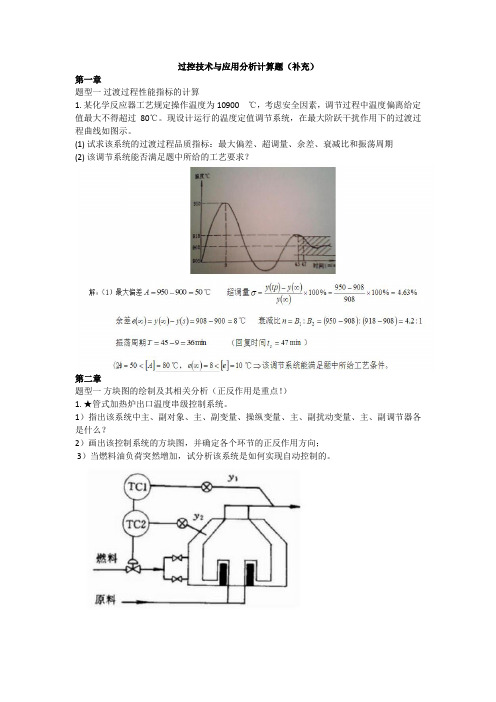
过控技术与应用分析计算题(补充)第一章题型一过渡过程性能指标的计算1.某化学反应器工艺规定操作温度为10900℃,考虑安全因素,调节过程中温度偏离给定值最大不得超过80℃。
现设计运行的温度定值调节系统,在最大阶跃干扰作用下的过渡过程曲线如图示。
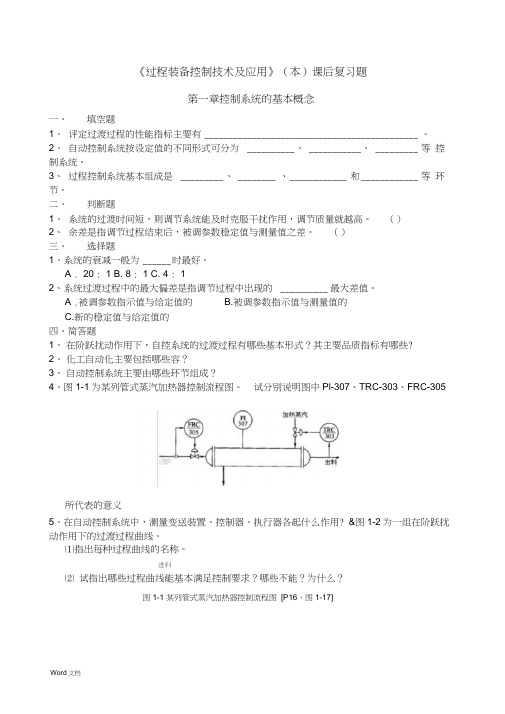
(1)试求该系统的过渡过程品质指标:最大偏差、超调量、余差、衰减比和振荡周期(2)该调节系统能否满足题中所给的工艺要求?第二章题型一方块图的绘制及其相关分析(正反作用是重点!)1.★管式加热炉出口温度串级控制系统。
1)指出该系统中主、副对象、主、副变量、操纵变量、主、副扰动变量、主、副调节器各是什么?2)画出该控制系统的方块图,并确定各个环节的正反作用方向;3)当燃料油负荷突然增加,试分析该系统是如何实现自动控制的。
解:1)主对象:加热炉内加热管的管壁;副对象:加热炉的炉膛主变量:原料的出口温度T1;副变量:炉膛内的温度T2;操纵变量:燃料的流量;主扰动量f1:被加热原料的进口的温度、压力、流量副扰动量f2:燃料油的压力、温度;雾化燃料油用的过热蒸汽的压力、流量;燃烧器的配风、炉膛的漏风以及环境温度等。
2)加热炉出口温度串级控制系统的方块图3)当燃料油负荷突然增加,试分析该系统是如何实现自动控制的。
在稳定工况下,原料油出口温度和炉膛温度处于相对稳定状态,控制燃料油的阀门保持在一定的开度。
当燃料油负荷突然增加,这个干扰会使炉膛的温度T2升高,原料油出口温度T1也会随之提高,此时温度检测变送器TT1将信号送给主控制器TC1,e1增大,主控制器输出u1减小,即副控制器的给定值减小,副控制器的输入偏差e2增大,副控制器的输出信号u2减小,控制阀开度减小,即操纵变量燃料油m减小,炉膛温度T2下降,从而炉管内原料油出口温度T1也会随之下降。
2.★课本P.42例2-3第三章题型一压力、温度测量应变片的贴片位置(设计)及其相关计算1.构件受载荷的作用如图示,已知构件截面:Φ20mm,为测量载荷P在构件上贴四个应变片,构成全桥测量。
过程装备控制技术及应用复习题1-10页
《过程装备控制技术及应用》(本)课后复习题第一章控制系统的基本概念一、填空题1、评定过渡过程的性能指标主要有_____________________________________________ 。
2、自动控制系统按设定值的不同形式可分为__________ 、 ___________ 、 _________ 等控制系统。
3、过程控制系统基本组成是_________ 、 ________ 、____________ 和____________ 等环节。
二、判断题1、系统的过渡时间短,则调节系统能及时克服干扰作用,调节质量就越高。
()2、余差是指调节过程结束后,被调参数稳定值与测量值之差。
()三、选择题1、系统的衰减一般为______ 时最好。
A . 20 : 1 B. 8 : 1 C. 4 : 12、系统过渡过程中的最大偏差是指调节过程中出现的__________ 最大差值。
A .被调参数指示值与给定值的 B.被调参数指示值与测量值的C.新的稳定值与给定值的四、简答题1、在阶跃扰动作用下,自控系统的过渡过程有哪些基本形式?其主要品质指标有哪些?2、化工自动化主要包括哪些容?3、自动控制系统主要由哪些环节组成?4、图1-1为某列管式蒸汽加热器控制流程图。
试分别说明图中Pl-307、TRC-303、FRC-305所代表的意义5、在自动控制系统中,测量变送装置、控制器、执行器各起什么作用? &图1-2为一组在阶跃扰动作用下的过渡过程曲线。
⑴指出每种过程曲线的名称。
进料⑵ 试指出哪些过程曲线能基本满足控制要求?哪些不能?为什么?图1-1 某列管式蒸汽加热器控制流程图[P16,图1-17]7、五、计算题某化学反应器工艺规定操作温度为(800 ±0)C。
为确保生产安全,控制中温度最高不得超过850r。
现运行的温度控制系统,在最大阶跃扰动下的过渡过程曲线如图1-3所示。
⑴ 分别求出最大偏差、余差、衰减比、过渡时间(温度进入按±>%新稳态值即视为系统已稳定来确定)和振荡周期。
常州大学过程装备控制技术及应用重点(删减版)
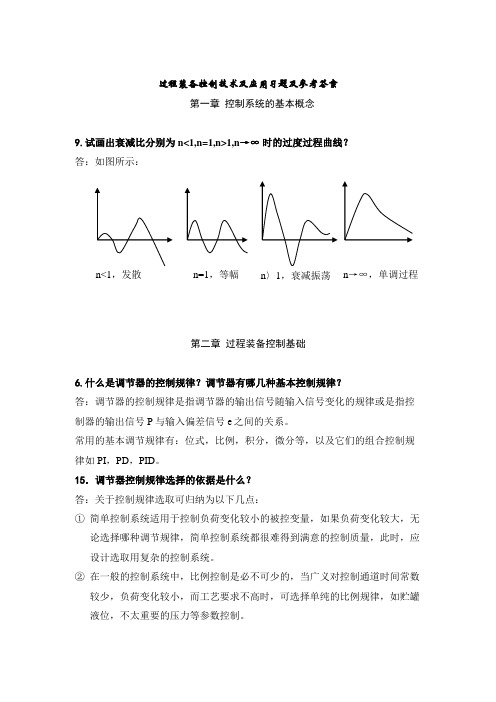
过程装备控制技术及应用习题及参考答案第一章 控制系统的基本概念9.试画出衰减比分别为n<1,n=1,n>1,n →∞ 时的过度过程曲线?答:如图所示:第二章 过程装备控制基础6.什么是调节器的控制规律?调节器有哪几种基本控制规律?答:调节器的控制规律是指调节器的输出信号随输入信号变化的规律或是指控制器的输出信号P 与输入偏差信号e 之间的关系。
常用的基本调节规律有:位式,比例,积分,微分等,以及它们的组合控制规律如PI ,PD ,PID 。
15.调节器控制规律选择的依据是什么?答:关于控制规律选取可归纳为以下几点:① 简单控制系统适用于控制负荷变化较小的被控变量,如果负荷变化较大,无论选择哪种调节规律,简单控制系统都很难得到满意的控制质量,此时,应设计选取用复杂的控制系统。
② 在一般的控制系统中,比例控制是必不可少的,当广义对控制通道时间常数较少,负荷变化较小,而工艺要求不高时,可选择单纯的比例规律,如贮罐液位,不太重要的压力等参数控制。
n<1,发散振荡n 〉1,衰减振荡 n=1,等幅振荡 n →∞,单调过程③ 当广义对象控制通道时间常数较,负荷变化较小,而工艺要求无余差时,可选用比例积分调节规律,如管道压力,流量等参数的控制。
④ 当广义对象控制通道时间常数较大或容量滞后较大时,应引入微分作用,如工艺充许消除余差,可选用比例微分调节规律;如工艺要求无余差时,则选用PID 调节规律,如温度,成分,PH 等参数控制。
⑤ 如果被控对象传递参数可用 近似,则可根据对象的可控比t/T 选择哪个调节器的调节规律。
当t/T 时,选用P 或PI ;当 时,选PD 或PID ;当 时,采用简单控制系统往往不能满足控制要求,这时应选用复杂控制系统。
第三章 过程检测技术13用两只分度号为K 的热电偶测量A 区与B 区的温差,连接方法如图3-79所示。
若(1) 0220A t C = , 020B t C =(2)0200A t C =, 0500B t C =试分别求两种情况下的示值误差,并解释为何与实际温差不同.解:查热电偶分度号表:K 型热电偶:20℃ 200℃ 220℃ 500E: 0.798mv 8.137mv 8.937mv 20.640mv(1) ΔE=8.938-0.798=8.140mv反查K 热电偶分度号表: 201℃-----8.177mv内析求得: Δt=200.075℃(2) ΔE=20.640-8.137=12.503℃反查K 分度号表:307----12.498℃; 308----12.539℃内析求得: Δt=307.12℃分析原因:低温度下热电势与温度线性关系较好,高温时误差较大。
过程装备控制技术及实际应用总复习

2013 过程装备控制技术复习测评1-4一、填空20分1 对控制系统的基本要求:稳定性、快速性、准确性2控制系统的组成:(1)被控对象(2)测量元件和变送器(3)调节器(4)执行器控制系统按输出信号对操纵变量的影响分:开环控制系统和闭环控制系统控制系统按克服干扰的方法分:反馈控制系统、前馈控制系统和前馈反馈控制系统3 过渡过程的基本形式:发散振荡过程、非振荡发散过程、等幅振荡过程和非振荡衰减过程4复杂控制系统分为:串级控制系统、前馈控制系统、分程控制系统、选择性控制系统、均匀控制系统和比值控制系统5 控制系统对象特性参数:放大系数K 时间常数T 滞后时间τ6连续生产过程所遵守的两个最基本的关系连续生产过程所遵守的两个最基本的关系:物料平衡和能量平衡。
7 PID 调节器的参数整定调节器的参数整定:整定内容;调节器的比例度δ,积分时间T1 和微分时间TD。
整定方法;①经验试凑法,②临界比例度法,③衰减曲线法。
8 最常见测量温度的传感器:热电偶和热电阻传感器9仪表的精度等级1.0级表明允许引用误差为1.0%10流量计的分类流量计的分类:A 压差式流量计,B 转子式流量计、C 电磁式流量计二、选择10分1. 程装备控制的主要参数:温度、压力、流量、液位(或物位)、成分和物性等.2. 被控对象特性的参数及其对对象控制质量的影响(1)放大系数K 对控制通道,K值大,控制灵敏,但被控变量不易控制,系统不稳定;对干扰通道,K 值越小,相同干扰产生的作用越小,利于控制。
残骛楼諍锩瀨濟溆塹籟。
3 热电偶温度仪表由热电偶、电测仪和连接导线组成。
热电偶是由两种不同的导体或半导体材料焊接而成。
焊接的一端称为热端,与导线连接的一端称为冷端。
4 调节阀的类型根据阀芯的动作形式可分为直行程式和转角式。
属于直行程式的阀有直通双座阀、直通单座阀、角型阀、三通阀、高压阀、超高压阀、隔膜阀等。
属于转角阀的有蝶阀、球阀和凸轮挠曲阀等。
5 按照所用能源调节器可分为直接作用式调节器和间接作用调节器。
过程装备控制技术及应用试卷

闭卷!若MCS-51单片机使用晶振频率为MHz时,其复位持续时间应该超过( )。
准双向口!P0~P3!多数情况下,人们希望自动控制系统在干扰作用下能够得到()型的过渡过程。
AA、衰减振荡B、非周期振荡C、等幅振荡D、发散振荡关于用热电偶与补偿导线配接进行温度测量时,以下说法不正确的是()CA、热电偶与补偿导线应该配接B、补偿导线也有极性C、采用了补偿导线后可以不进行冷端温度补偿D、在一定温度范围内,热电偶与补偿导线有近似相同的热电特性. 分程控制的应用场合不包括(D)A、扩大控制阀的可调范围B、用作安全生产的防护措施C、为满足工艺要求在一个控制系统中控制两种不同的介质D、用于大滞后对象. Pt100铂电阻在0度时的电阻值为(3)。
1)0欧姆 2)0.1欧姆 3)100欧姆 4)108欧姆单纯的前馈调节是一种能对( 3 )进行补偿的调节系统。
1)测量与给定之间的偏差 2)被调量的变化3)干扰量的变化 4)输出的变化转子流量计中的流体流动方向是( 2 )1)自上而下 2)自下而上 3)都可以下列温度系数为负温度系数的是( D )。
A. Pt100B.Pt10C. Cu50D.热敏电阻.分程调节系统一般有( B)个调节阀.A.1个;B.2个;C.3个;D.4个DDZ-Ⅱ型仪表现场传输信号为0~10mA,DDZ-Ⅲ型控制仪表现场传输信号为。
答:4~20mA安全栅的作用是(),();(信号传输)(阻止危险信号进入危险场所)国际电工委员会是以( )、()作为标准统一的电信号;(4~20mA)(1~5V). 气动执行器的标准输入信号范围是。
0.02~0.1MPa.由于物料或能量的传递需要通过一定的阻力导致的滞后称为。
答:容量滞后. PT100,其0度的标称电阻值分别为100欧. 控制阀的流量特性是指被调介质流过阀门的相对流量与阀门的之间关系。
相对开度控制阀所能控制的的比值称为控制阀的可调比。
最大流量与最小流量定值控制系统是按照进行调节的,而前馈控制是按照进行调节的;前者是闭环控制,后者是控制。
过程装备控制技术及应用试题

过程装备控制技术及应用试题The manipulater variable: 操纵变量受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为控制变量。
Dynamic Process of Control System: 控制系统的过渡过程从被控对象受到干扰作用使被控变量偏离给定值时起,调节器开始发挥作用,使被控变量回复到给定值附近范围内。
然而这一回复并不是瞬间完成的,而是要经历一个过程,这个过程就是控制系统的过渡过程。
Span of gauge: 仪表量程仪表在保证规定精度的前提下所能测量的被测量的区域称为仪表的测量范围。
Hysteresis: 迟滞在输入量增加和减少的过程中,对于同一输入量会得出大小不同的输出量,在全部测量范围内,这个差别的最大值与仪表的满量程之比值称为迟滞误差。
Gain: 增益/放大倍数被控对象重新达到平衡状态时的输出变化量与输入变化量之比。
Cascade Control: 串级控制系统在对象滞后较大、干扰作用强烈而且频繁的主控制系统中,对局部参数进行预先控制以提高系统总体控制水平的复合控制系统。
Split Range Control System: 分程控制系统The control signal is split into several parts , each associated with one of the manipulated variables. A signal process is controlled by coordinating the actions of several manipulated variables, all of which have the same effect on the controlled output.Alter-ratio control system : 变比值控制系统两种物料的比值能灵活地随第三变量的需要而加以调整的控制系统。
过程装备控制技术及应用资料
y Ki
x Kf
8
上述分析表明,采用单个放大器的仪表具有如下特点: 在满足 KKf>>1 的条件时,仪表的输入输出关系仅取决
于输入部分的特性和反馈部分的特性。
此类仪表分析方法:
(1)分析依据:
y KiK x 1 KK f
y Ki x Kf
(2)划分三部分:输入、放大、反馈
(3)对各部分进行分析,重点分析输入部分和反馈部分
s
KITI s KD
20
调节器工作原理
➢输出电路:
I0
I0'
24V U f Rf
U03 Rf
➢指示电路:
I0
I
' 0
节器工作原理
➢手动操作
软手动:调节器的输出电流随手动输入时间而逐渐改变, 呈积分关系。 硬手动:调节器的输出电流随手动输入而立即改变,呈比例关 系。
22
U01 2(Us Ui )
➢ 比例微分电路:
U02 (s)
a KD
1 1
TD s TD
U
01
(
s)
KD
19
调节器工作原理
➢比例积分电路:
CI [1 1 ]
U03(s) CM 1
Ts 1
U02 (s)
KITI s
➢Ⅲ型调节器传递函数
1 1 TD s
W (s) KPF 1
FTI s F 1 TD
数字控制器由以处理器(CPU)为核心构成的硬件电路 和由系统程序、用户程序构成的软件两大部分组成
其功能主要是由软件所决定
可以实现各种不同的控制功能
调节器工作原理
除上述基本功能外,为了提高控制器的性能,有的控制 器还增加了一些附加功能,如:输出限幅、输入报警、偏差 报警、停电对策等。
过程装备控制与技术复习要点
《过程装备控制与技术》复习1 考核范围前四章,以仪表与系统为考核重点。
2 题型1、填空题(20分)基本上都是来自于书上的原话,填写空出来的字眼,要求看前多看书,只要对书本熟悉就能填出来。
2、选择题(20分)选题遍布整个考核范围,提供50个选择题供大家复习学习。
3、简答题(30分)以基本概念与基本原理为主,提供20个供大家复习学习。
4、综合分析题(30分)考核对控制系统的综合分析和解决问题的能力,单回路系统与复杂系统各一个。
3 选择题复习资料1、一台PID三作用式控制器,如果将比例度调到100%,积分时间调到最大(∞),微分时间调到零,则此时调节器的作用为:( C )A PIB PDC PD PID2、过渡过程常出现如下几种形式:①非振荡衰减过程②衰减振荡过程③等幅振荡过程④发散振荡过程⑤非振荡发散过程其中,属于稳定过程的有( D )。
A ①③B ②④C ③⑤D ①②3、雷达跟踪系统属于( B )。
A 定值控制系统B 随动控制系统C 程序控制系统D 前馈控制系统4、下列控制系统中,( C )是开环控制。
A 定值控制系统B 随动控制系统C 前馈控制系统D 程序控制系统5、下列参数( d )不属于过程特性参数。
A 放大系数KB 时间常数TC 滞后时间τD 积分时间T i6、下述名词中,( c )不是过渡过程的品质指标。
A 最大偏差B 余差C 偏差D 过渡时间7、当阀前后的压差较大,并允许有较大泄漏量时,选择下面哪种阀较为合适。
( b )A 直通单座调节阀B 直通双座调节阀C 隔膜调节阀D 三通调节阀8、在自动控制系统中,( B )变量一般是生产过程中需要控制的变量。
A 操纵变量B 被控变量C 干扰变量D 中间变量9、如果被控过程的变化小,仪表指针移动量很大,则该仪表的( C )A 精确度高B 精确度低C 灵敏度高D 灵敏度低10、某二阶系统采用了PID控制方法,若比例度低于了临界比例度,系统将出现( C )A 衰减振荡B 等幅振荡C 发散振荡D 不振荡11、微分作用具有“超前调节”的特点,所以它可以用来克服( A )A 纯滞后B 调节通道的时间常数过大C 干扰通道的时间常数过大D 调节通道的放大倍数过小12、自动控制系统在运行过程中,由于种种原因使对象特性改变了,并由此导致过渡过程曲线变差了,为了获得较好的过渡曲线,通常采用的解决方法是( A )A 重新整定调节器的参数B 更换调节器C 重新设计控制系统D 要求工艺做调整13、检测仪表的品质指标为( A )A 变差B 余差C 最大偏差D 过渡过程时间14、在阶跃扰动作用下,被控变量随时间变化情况中( B )是我们最希望得到的,( C )是绝对不允许出现的。
过程装备控制技术及应用试题
过程装备控制技术及应用试题一、选择题(每题2分,共20分)1、闭环控制系统是根据___________信号进行控制的。
(A) 被控量;B)偏差;(C) 扰动;(D)给定值2、DDZ-Ⅲ型仪表采用国际标准信号,现场传输信号是( ),控制联络信号为1~5VDC。
(A)0~10mADC;(B)4~20mADC;(C)1~5VDC;(D)1~10VDC。
3、对于PID调节器( )。
(A)I的作用是减小动态偏差、D的作用是消除静态偏差;(B)I的作用是消除静态偏差、D的作用是消除动态偏差;(C)I的作用是消除动态偏差、D的作用是减小静态偏差;(D)I的作用是消除静态偏差、D的作用是减小动态偏差4、因为( )对于干扰的反应是很灵敏的。
因此,它常用于温度的调节,一般不能用于压力、流量、液位的调节。
(A)比例动作;(B)积分动作;(C)微分动作;(D)比例积分5、调节系统中用临界比例带法整定参数的具体方法是( ) 。
(A)先将Ti置最大,TD置最小,δP置较大;(B)先将Ti置最小,TD置最大,δP置较大;(C)先将Ti置最小,TD置最小,δP置较小;(D)先将Ti置最小,TD置最小,δP置较大。
6、调节对象在动态特性测试中,应用最多的一种典型输入信号是( )。
(A)阶跃函数;(B)加速度函数;(C)正弦函数;(D)指数函数。
7、霍尔压力变送器是利用霍尔效应把压力作用下的弹性元件位移信号转换成( )信号来反应压力的变化。
(A)电流;(B)相位;(C)电动势;(D)以上都是8、要使PID调节器为比例规律,其积分时间Ti和微分时间TD应设置为( )。
(A)∞、∞;(B)∞、0;(C)0、0;(D)0、∞9、动态偏差是指调节过程中( )之间的最大偏差。
(A)被调量与调节量;(B)调节量与给定值;(C)被调量与给定值;(D)以上都不是10、需要知道对象的动态特性,才能进行参数整定的工程方法是( )。
(A) 临界比例带法;(B) 衰减曲线法;(C) 响应曲线法;(D) 广义频率法二、填空题(每空2分,共30分)1、工业生产对过程装备的基本要求是、、等。
过程装备控制技术及应用复习题
第一章1.简述被控对象、被控变量、操纵变量、扰动(干扰)量、设定(给定)值和偏差的含义? 答:自动控制系统中常用的几个术语其含义是:被控对象:自动控制系统中,工艺参数需要控制的生产过程、设备或机器等。
被控变量:被控对象内要求保持设定数值的工艺参数。
操纵变量:受控制器操纵的,用以克服干扰的影响,使被控变量保持设定值的物料量或能量。
扰动量:除操纵变量外,作用于被控对象并引起被控变量变化的因素。
设定值:被控变量的预定值。
偏差:被控变量的设定值与实际值之差。
3.自动控制系统主要由哪些环节组成?各部分的作用是什么?答:自动控制系统主要由两大部分组成。
一部分是起控制作用的全套自动化装置,对于常规仪表来说,它包括检测元件及变送器、控制器、执行器等;另一部分是受自动化装置控制的被控对象。
在自动控制系统中,检测元件及变送器用来感受被控变量的变化并将它转换成一种特定的信号(如气压信号或电压、电流信号等)。
控制器将检测元件及变送器送来的测量信号与工艺上需要保持的设定值信号进行比较得出偏差,根据偏差的大小及变化趋势,按预先设计好的控制规律进行运算后,将运算结果用特定的信号(如气压信号或电流信号)发送给执行器。
执行器能自动地根据控制器送来的信号值相应地改变流入(或流出)被控变量的物料量或能量,克服扰动的影响,最终实现控制要求。
4。
什么是自动控制系统的过渡过程?在阶跃扰动作用下,其过渡过程有哪些基本形式?哪些过渡过程能基本满足控制要求?答:把系统从一个平衡状态进入另一个平衡状态之间的过程称为系统的过渡过程。
过渡过程中被控变量的变化情况与干扰的形式有关。
在阶跃扰动作用下,其过渡过程曲线有以下几种形式。
①发散振荡过程如图1-3 (a)所示。
它表明当系统受到扰动作用后。
被控变量上下波动,且波动幅度逐渐增大,即被控变量偏离设定值越来越远,以至超越工艺允许范围。
②非振荡发散过程如图1-3 (b)所示。
它表明当系统受到扰动作用后,被控变量在设定值的某一俩作非振荡变化,且偏离设定值越来越远,以至超越工艺允许范围。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013 过程装备控制技术复习测评1-4一、填空20分1 对控制系统的基本要求:稳定性、快速性、准确性2控制系统的组成:(1)被控对象(2)测量元件和变送器(3)调节器(4)执行器控制系统按输出信号对操纵变量的影响分:开环控制系统和闭环控制系统控制系统按克服干扰的方法分:反馈控制系统、前馈控制系统和前馈反馈控制系统3 过渡过程的基本形式:发散振荡过程、非振荡发散过程、等幅振荡过程和非振荡衰减过程4复杂控制系统分为:串级控制系统、前馈控制系统、分程控制系统、选择性控制系统、均匀控制系统和比值控制系统矚慫润厲钐瘗睞枥庑赖。
5 控制系统对象特性参数:放大系数K 时间常数T 滞后时间τ6连续生产过程所遵守的两个最基本的关系连续生产过程所遵守的两个最基本的关系:物料平衡和能量平衡。
7 PID 调节器的参数整定调节器的参数整定:整定内容;调节器的比例度δ,积分时间T1 和微分时间TD。
整定方法;①经验试凑法,②临界比例度法,③衰减曲线法。
聞創沟燴鐺險爱氇谴净。
8 最常见测量温度的传感器:热电偶和热电阻传感器9仪表的精度等级 1.0级表明允许引用误差为 1.0%10流量计的分类流量计的分类: A 压差式流量计, B 转子式流量计、 C 电磁式流量计二、选择10分1. 程装备控制的主要参数:温度、压力、流量、液位(或物位)、成分和物性等.2. 被控对象特性的参数及其对对象控制质量的影响(1)放大系数K 对控制通道,K值大,控制灵敏,但被控变量不易控制,系统不稳定;对干扰通道,K 值越小,相同干扰产生的作用越小,利于控制。
残骛楼諍锩瀨濟溆塹籟。
3 热电偶温度仪表由热电偶、电测仪和连接导线组成。
热电偶是由两种不同的导体或半导体材料焊接而成。
焊接的一端称为热端,与导线连接的一端称为冷端。
酽锕极額閉镇桧猪訣锥。
4 调节阀的类型根据阀芯的动作形式可分为直行程式和转角式。
属于直行程式的阀有直通双座阀、直通单座阀、角型阀、三通阀、高压阀、超高压阀、隔膜阀等。
属于转角阀的有蝶阀、球阀和凸轮挠曲阀等。
5 按照所用能源调节器可分为直接作用式调节器和间接作用调节器。
6计算机控制系统的分类计算机控制系统的分类:(1)数据采集和数据处理系统(2)直接数字控制系统(DDC)(3)监督控制系统SCC (4)分级计算机控制系统(5)集散型控制系统彈贸摄尔霁毙攬砖卤庑。
7常见的流量特性分类及其使用特性常见的流量特性分类及其使用特性:A.理想流量特性①直线流量特性,在流量小时,流量的变化值大,而流量大时,流量变化的相对值小。
因此具有直线流量特性的调节阀不宜用于负荷变化较大的场合。
②对数流量特性,适应能力强,在工业过程控制中应用广泛。
③快开流量特性,主要用于迅速启闭的切断阀或双位调节系统。
④抛物线流量特性,介于直线流量特性与等百分比流量特性之间。
B.工作流量特性①串联管道工作流量特性②并联管道工作流量特性.謀荞抟箧飆鐸怼类蒋薔。
8计算机控制系统的组成计算机控制系统的组成:计算机控制系统是由工业对象和工业控制计算机两大部分组成。
工业控制计算机主要由硬件和软件两部分组成,硬件部分主要包括计算机主机、外部设备、外围设备、工业自动化仪表和操作控制台等;软件是指计算机系统的程序系统。
厦礴恳蹒骈時盡继價骚。
9 控制系统中常用的调节规律有:P PI和PID调节。
10被控对象的滞后分为纯滞后和容量滞后。
三、简答20分1 在控制系统中,对象的放大系数,时间常数,滞后时间对控制有什么影响?答:对于不同的通道,对象的特性参数(K,T ,τ)对控制作用的影响是不同的。
对于控制通道:放大系数K大,操纵变量的变化对被控变量的影响就大,即控制作用对扰动的补偿能力强,余差也小;放大系数K小,控制作用的影响不显著,被控变量的变化缓慢。
但K太大,会使控制作用对被控变量的影响过强,使系统的稳定性下降。
茕桢广鳓鯡选块网羈泪。
在相同的控制作用下,时间常数T大,则被控变量的变化比较缓慢,此时对象比较平稳,容易进行控制,但过渡过程时间较大;若时间常数T小,则被控变量变化速度快,不易控制。
时间常数太大或太小,在控制上都将存在一定困难,因此,需根据实际情况适中考虑。
鹅娅尽損鹌惨歷茏鴛賴。
滞后时间τ的存在,使得控制作用总是落后于被控变量的变化,造成被控变量的最大偏差增大,控制质量下降。
因此,应尽量减小滞后时间τ。
籟丛妈羥为贍偾蛏练淨。
对于扰动通道:放大系数K大对控制不利,因为当扰动频繁出现且幅度较大时,被控变量的波动就会很大,使得最大偏差增大;而放大系数k小,即使扰动较大,对被控变量仍然不会产生多大影响。
預頌圣鉉儐歲龈讶骅籴。
时间常数T大,扰动作用比较平缓,被控变量变化较平稳,对象较易控制。
纯滞后的存在,相当于将扰动推迟τ0时间才进入系统,并不影响控制系统的品质;而容量滞后的存在,则将使阶跃扰动的影响趋于缓和,被控变量的变化相应也缓和些,因此,对系统是有利的渗釤呛俨匀谔鱉调硯錦。
2 .什么是双位控制,比例控制,积分控制,微分控制,它们各有什么特点?答:①位式控制器的输出只有几个特定的数值,或它的执行机构只有几个特定的位置。
最常见的是双位控制。
,它们输出只有两个数值(最大或最小),其执行机构只有两个特定的位置(开或关)。
铙誅卧泻噦圣骋贶頂廡。
位式控制器结构简单,成本较低,易于实现,应用较普遍。
但它的控制作用不是连续变化的,由它所构成的位式控制系统其被控变量的变化将是一个等幅振荡过程,不能使被控变量稳定在某一数值上。
擁締凤袜备訊顎轮烂蔷。
②积分控制(P)是指调节器的输出信号变化量与输入信号变化量e(t)成比例关系:,--比例放大系数,比例控制的伏点是反应快,控制及时,其缺点是当系统的负荷改变时,控制结果有余差存在,即比例控制不能消除余差,因此只在对被控变量要求不高的场合,才单独使用比例控制。
贓熱俣阃歲匱阊邺镓騷。
③积分控制(I):调节器输出信号的变化量与输入偏差的积分成正比,即:式中--积分速度,--积分时间。
积分规律的特点是控制缓慢,但能消除余差。
由于输出变化量总要滞后于偏差的变化,因此不能及时有效地克服扰动的影响,加剧了被控变量的波动,使系统难以稳定下来,故不单独使用积分控制规律。
坛摶乡囂忏蒌鍥铃氈淚。
④微分控制(D)--指调节器输出信号的变化量与输入偏差的变化速度成正比。
即。
--微分时间。
微分控制规律的特点是有一定的超前控制作用,能抑制系统振荡,增加稳定性;由于其输出只与偏差的变化速度有关,而与偏差的存在无关,因此,不能克服确定不变的偏差。
故也不单独使用。
蜡變黲癟報伥铉锚鈰赘。
3比例、积分、微分、控制分别用什么量表示其控制作用的强弱?并分别说明它们对控制质量的影响。
答:①比例——比例度是反映比例控制器的比例控制作用强弱的参数。
比例度越大,表示比例控制作用越弱。
减少比例度,系统的余差越小,最大偏差也越短,系统的稳定程度降低;其过渡过程逐渐以衰减振荡走向临界振荡直至发散振荡。
買鲷鴯譖昙膚遙闫撷凄。
②积分控制——积分时间T I表示积分控制作用强弱的参数,积分时间越小,表示积分控制作用越强。
积分时间T I的减少,会使系统的稳定性下降,动态性能变差,但能加快消除余差的速度,提高系统的静态准确度,最大偏差减小。
綾镝鯛駕櫬鹕踪韦辚糴。
③微分控制——微分时间T D是表示微分控制作用强弱的一个参数。
如微分时间T D越大,表示微分控制作用越强。
增加微分时间T D,能克服对象的滞后,改善系统的控制质量,提高系统的稳定性,但微分作用不能太大,否则有可能引起系统的高频振荡。
驅踬髏彦浃绥譎饴憂锦。
3 热点偶有那些特点?用普通导线和补偿导线作热电偶的延长线,效果有何不同?试证明补偿导线的补偿作用。
答:热电偶的特点有:测量精度教高,性能稳定;结构简单,易于制造,产品互换性好;将温度信号转换成电信号,便于信号远传和象现多点切换测;测量范围广,可达-200~2000℃,形式多样,适用于各种测量条件。
选用补偿导线要求其在一定温度范围内与所连接的热电偶具有相同的热电特性,型号相配,极性连接正确。
补偿导线的作用证明:猫虿驢绘燈鮒诛髅貺庑。
如图所示:回路中电势为:E=Eab(t,t1)+Ecd(t1,t0)由补偿导线的性质得:Ecd(t1,t0)=Eab(t1,t0)∴E=Eab(t,t1)+Eab(t1,t0)=Eab(t,t0)补:用普通导线做热电偶得延长线要求引入两端得温度相同热电势不同,故一般接热电偶的冷端,因此冷端温度依然是现场温度。
而用补偿导线却可以将冷端温度现场温度分开,利于测量。
锹籁饗迳琐筆襖鸥娅薔。
4 .PID调节器是由哪些基本部分组成的?试分析各部分所完成的功能。
答:PID调节器的基本组成有输入电路,运算电路和输出电路组成。
输入电路是检测偏差信号,信号经滤波电路后输出导PID运算电路。
(输入电路包括偏差检测电路,内给定稳压电源电路,内外给定切换开关,正反作用开关及滤波电路等)。
構氽頑黉碩饨荠龈话骛。
PID运算电路:根据整定好的参数用以对偏差信号进行比例,微分和积分的运算,是调节器实现PID控制规律的关键环节。
輒峄陽檉簖疖網儂號泶。
输出电路:将运算电路的输出信号做最后一次放大,或者作为运算电路之回路中放大器的组后一级,提供调节器的输出信号。
尧侧閆繭絳闕绚勵蜆贅。
四、分析计算20分1.有一电动比例调节器,器输入电流范围为4~20mA,输出电压范围是1-5V。
试计算当比例度规定在40%时,输入电流变化4mA所引起的输出电压变化量为多少?识饒鎂錕缢灩筧嚌俨淒。
解:∵max minmax min 0.4e x xp p p即4 2040.451u2.5u V即:输出电压变化量为 2.5V2 6.某被控对象有5个模拟量控制回路和3个模拟量检测监视回路,试为该对象设计一个监督计算机控制系统方框图。
凍鈹鋨劳臘锴痫婦胫籴。
解:方框图见:3.已知模拟调节器的传递各数G (S )=(1+0.17S )/0.085S ,现在要用数字PID 算法来实现,试分别写出相应的位置式和增量式PID 算法表达式,设采样周期为To=0.2S.恥諤銪灭萦欢煬鞏鹜錦。
解:由G (S )=10.170.085s s,可得:p K =1 I T =0.17 D T =0.085位置式 u(k)=p K {e(k)+()[()(1)]kD i IT T e i e k e k T T}代入 T=0.2u(k)= {e(k)+0.20.085()[()(1)]0.170.2ki e i e k e k }增量式:u(k)=p K [()(1)]e k e k+()[()2(1)(2)]I D K e k K e k e k e k其中:10.20.17IpIT K K T 10.0850.2D DpT K K Tu(k)= [()(1)]e k e k +10.210.085()[()2(1)(2)]0.170.2e k e k e k e k 测量测量控制生产过程模拟仪表SCC2控机五、综合30分试分析四线制变送器与两线制变送器与电源的连接方式并画出示意图。