实车条件下的驾驶员反应时间测量方法与相关技术
驾驶员反应时间研究

驾驶员反应时间研究耿岚鑫;刘凇男;刘大学【摘要】For warning type of intelligent driver assistance systems, the reaction time of driver is an impor-tant parameter. The measurement of the driver’ s reaction time is implemented for different types of driver and ways of warning on the real vehicle test platform. Different reaction time of driver can be obtained by a variety of experiments. The results of study will play a positive role on selecting the warning mode and time of intelligent driver assistance systems.%对于预警类智能辅助驾驶系统,驾驶员的反应时间是一个重要参数。
本文针对不同的驾驶员类型、不同的预警方式,在实车测试平台上进行驾驶员反应时间的测量。
通过实验可以得出各种情况下不同的驾驶员反应时间,该研究的成果将对预警类智能辅助驾驶系统中预警方式和预警时间的选取起到积极的作用。
【期刊名称】《交通节能与环保》【年(卷),期】2015(000)002【总页数】5页(P25-29)【关键词】汽车驾驶;驾驶员;反应时间;智能辅助驾驶系统【作者】耿岚鑫;刘凇男;刘大学【作者单位】交通运输部公路科学研究院汽车运输技术研究中心,北京 100088;交通运输部路网监测与应急处置中心,北京 100088;浙江交通职业技术学院,浙江杭州 311112【正文语种】中文【中图分类】U471.31 前言随着行车安全需求的提升和车辆智能化的普及,一系列安全辅助驾驶系统不断涌现,其中就包括一部分预警类的辅助驾驶系统,比如车道偏离预警系统(LDW)和前方碰撞预警系统(FCW)等。
城市道路环境中驾驶人应激响应感知_制动反应时间分析_王畅

通过对数据进行分析后发现四个场景的各个 统计数据彼 此 相 差 不 大,有 着 很 强 的 统 一 性,可 见 在试验条件下不同的应激场景对驾驶人应激状态 下的应激能力的影响不大,可以对四个应激场景的 数据进行合并处理。
对合并后 的 感 知-制 动 反 应 时 间 数 据 其 进 行 了 统计计算分析,结果如表 2 所示,不同驾驶人的感 知-制动反应时间变化范围为( 402 ~ 1 605) ms,均 值为( 830. 49) ms,50% 和 85% 百分位分别为 784 ms 和 1 085. 87 ms,标准差为 244. 96 ms。
中值 734. 5 677. 0 834. 0 793. 5
均值 818. 9 905. 1 858. 7 798. 0
标准差 252. 18 280. 43 208. 93 227. 67
图 2 车辆从施工交叉路口驶出
1. 2 应激响应模拟驾驶系统 试验过程中采用自主研发的应激响应模拟驾
驶系统采集被试驾驶人在应激状态下的制动、转向 等操作数据。试验过程中,可以实时同步采集模拟 驾驶过程中 的 方 向 盘 转 角、加 速 踏 板 开 度、制 动 踏 板开度以及离合器踏板开度等参数。模拟驾驶系 统中为提高模拟驾驶的真实感,采用外置式扬声器 播放车辆行驶过程中的各种声音。 1. 3 被试驾驶人
监测驾驶员状态常用技术方法
监测驾驶员状态常用技术方法监测驾驶员状态常用技术方法引言:随着交通事故频发,特别是由于疲劳驾驶和注意力不集中等因素造成的事故,对于驾驶员状态的监测成为了一个备受关注的问题。
为了提高交通安全性,科技在这方面的应用变得越来越重要。
本文将介绍一些常用的监测驾驶员状态的技术方法,并对其进行评估和探讨。
一、眼动监测技术眼动监测技术是通过追踪驾驶员的眼睛运动来评估他们的注意力和警觉性。
这种技术通过分析驾驶员的注视点、注视时间和眨眼频率等指标来判断他们的疲劳程度和专注度。
在过去的几年中,眼动监测技术已经得到了广泛的研究和应用。
然而,该技术还存在一些问题,例如无法准确判断驾驶员与车辆之间的关系以及对于驾驶员眼镜佩戴的限制等。
二、生理信号监测技术生理信号监测技术利用传感器监测驾驶员的生理指标,如心率、皮肤电导度、脑电图等,来评估他们的身心状态。
这些指标可以揭示驾驶员的情绪、压力和疲劳等信息,从而帮助预防交通事故的发生。
然而,生理信号监测技术需要在驾驶员身上安装传感器,这可能会对其自由度和舒适性产生影响。
三、语音识别技术语音识别技术通过分析驾驶员的语音特征来评估他们的疲劳和注意力水平。
这种技术可以识别驾驶员的语速、音调和频率等特征,并根据这些特征判断他们的状态。
语音识别技术具有一定的准确性和便利性,但也受到环境噪音的影响,并且对于不同驾驶员之间的差异性还需进一步研究和改进。
四、车辆行为监测技术车辆行为监测技术是通过分析车辆的驾驶行为来推断驾驶员的状态。
通过监测车辆的加速度、刹车力度和转弯角度等指标,可以评估驾驶员的疲劳和注意力水平。
然而,这种技术需要大量的数据和对车辆行为模式的深入研究,且受到驾驶环境和车辆状态的影响较大。
结论:以上介绍了一些常用的监测驾驶员状态的技术方法,并对其进行了评估和探讨。
眼动监测技术、生理信号监测技术、语音识别技术和车辆行为监测技术各有优劣,可以结合使用以提高检测的准确性和可靠性。
未来,随着科技的不断发展,我们有理由相信监测驾驶员状态的技术将得到进一步改进和完善,从而有效预防交通事故的发生。
基于驾驶员生理反应特征的检测方法

一、概述随着交通工具的发展和普及,驾驶员的安全性和健康状况越来越受到关注。
驾驶员在行车过程中,可能受到各种外界因素的影响,影响其驾驶行为和安全性。
通过检测驾驶员的生理反应特征,可以更好地了解其身体状况和心理状态,为驾驶安全提供更加全面的保障。
二、生理反应特征的检测方法1. 生物传感器技术生物传感器技术是一种通过测量人体生理反应特征来检测驾驶员状态的技术。
这种技术可以通过测量心率、呼吸、皮肤电阻等生理指标,来了解驾驶员的身体状态。
通过这些生理指标的监测,可以分析驾驶员的情绪状态、疲劳程度等,从而及时发现驾驶员可能存在的安全隐患。
2. 眼动追踪技术眼动追踪技术是一种通过追踪驾驶员眼睛运动轨迹来了解驾驶员精神状态的技术。
通过这种技术可以分析驾驶员的注意力集中程度、疲劳程度等。
在驾驶过程中,如果驾驶员的眼动轨迹呈现出明显的疲劳状态,就可能存在安全隐患,需要及时采取措施。
3. 脑电图技术脑电图技术是一种通过监测驾驶员脑电信号来了解其大脑活动状态的技术。
通过这种技术可以分析驾驶员的认知状态、情绪状态等。
如果驾驶员的脑电信号呈现出异常状态,可能会影响其驾驶行为,存在一定的安全风险。
三、基于生理反应特征检测方法的应用1. 驾驶行为监测通过以上介绍的生理反应特征检测方法,可以对驾驶员的行为进行实时监测。
当发现驾驶员的生理反应出现异常时,可以及时提醒驾驶员,或者采取相应的安全措施,避免发生交通事故。
2. 驾驶员健康管理通过实时监测驾驶员的生理反应特征,可以了解驾驶员的健康状况,及时发现潜在的健康问题。
通过分析驾驶员的生理指标和行为特征,可以为驾驶员提供个性化的健康管理建议,保障其身体健康和驾驶安全。
3. 交通安全管理生理反应特征检测方法也可以应用于交通安全管理领域。
通过监测驾驶员的生理指标和行为特征,可以为交通管理部门提供有针对性的交通安全管理建议,以降低交通事故的发生率。
四、生理反应特征检测方法的发展趋势1. 多元化生理反应特征检测方法随着科技的不断发展,生理反应特征检测方法也在不断创新和完善。
汽车跟驰状态下驾驶员反应时间研究

析 法 相 结 合 的 方 式 对 驾 驶 员反 应 时 间进 行 标 定 , 并 结合 简单反应 时间 、 复 杂 反 应 时 间 双 正 态 分 布 的 理 论 假 设, 通过 大 量 的 实 测 数 据 对 假 设 的 合 理 性 进 行 验 证 。 结 果 表 明 , 理 论 假 设 能 够 很 好 地 解 释 反 应 时 间 的 实测
数据 , 反 应 时 间 的 实测 数 据 可 以 由 这 两 个 正 态 分 布 的 混 合 分 布 来 拟 合 。 对 跟 驰 状 态 下 反 应 时 间 的 深 入 研
究, 为 驾 驶 员形 成 进 一 步 的 行 动 方 案 和 提 升 驾 驶 安 全 性 提 供 重要 的理 论 参 考 。
汽 车 跟 驰 状 态 下 驾 驶 员 反 应 时 间 研 究
杨 林 ”, 邢 翠 芳。 , 赵 海 冰。
( 1 _ 海军航空工程学院 控制工程系 , 山东 烟 台 2 6 4 0 0 0 ; 2 . 海军航空工程学 院 基础部 , 山东 烟 台 2 6 4 0 0 0 )
摘 要 : 驾驶 员反 应 时 间 是评 价 驾 驶 安 全 性 的 重 要 指 标 之 一 。本 研 究采 用 互相 关 分析 法 与 灰 色关 联 分
Y A N G Li n” , XI N G Cui — f a ng 。, ZH A O Ha i — b i ng
( 1 . Na v a l Ae r o n a u t i c a l An d As t r o n a u t i c a l Un i v e r s i t y , De p a r t me n t o f C o n t r o l E n g i n e e r i n g , Ya n t a i , S h a n d o n g 2 6 4 0 0 0, Ch i n a ; 2 . Na v a l Ae r o n a u t i c a l An d As t r o n a u t i c a l Un i v e r s i t y, De p a r t me n t o f Ba s i c S c i e n c e s , Ya n t a i , S h a n d o n g 2 6 4 0 0 0 , C h i n a )
快速路驾驶员反应时间的确定
_
一
∞ ∞ ∞如加 ∞加mo
一
为交 通工程 的研究 工作提供 了一个Biblioteka 新颖 有效 的工具 。通过 车载
辍
●
-
●
高精度 G S可 以实时地得到行驶车辆的速度 、 P 位置 , 并加 以记 录。
通过 G S专业软件 GaN v可 以计算 得 到车辆 的车头 间距等 重 P rfa
所示。
维普资讯
本研究根据 车载高精度 G S在 城市快速 道路实 际交 通流 中采 集 P
-
的跟 车数据 , 讨论特定的 司机 类型 ( 中年男性 、 职业 司机 ) 在加 速 跟车状 态和减 速跟车 状态 司机 的反 应时 间的规律 。G S的发 展 P
驰模型 、 确定道路通行能力 等有着 重要 的作用 , 是交通 流理论 研
究 的重 点 之 一 。
'
Io . . 一
O. 9
^‘
、
瞳
。
/
/
。
/
r
・
一
一-
.
猎
,
。
,一
, , 一
~
O囊
O. 7
Gl r 太 :~ F u
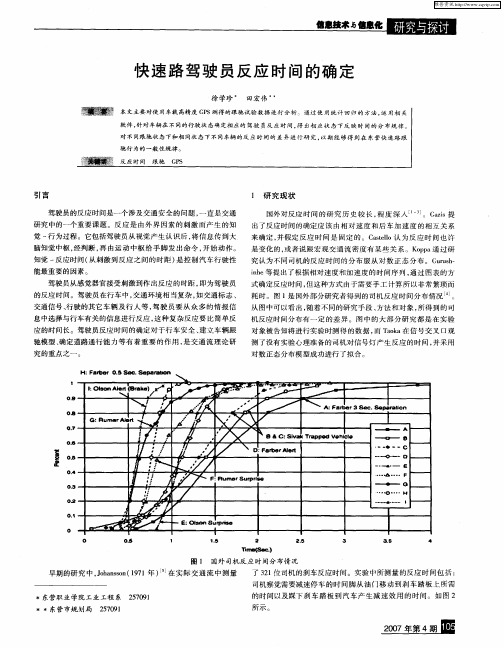
1 研 究 现 状 国外对反应 时间 的研究 历史 较 长 , 程度 深入 -3 ai 3。G z s提 出 了反应时间的确定应该 由相对 速度 和后车 加速度 的相互关 系 来确定 , 并假定 反应 时 间是 固定的 。C s l 认 为反应 时间也 许 atl eo 是变化的 , 或者说跟宏 观交通流 密度有 某些关 系。K p a op 通过研 究认为不同司机的反应 时间 的分 布服从 对数正 态分 布。G rs— uuh ie n 等提 出了根据相对速度和加速度 的时间序列 , 过 图表 的方 h 通 式确定反应 时间 , 但这种方式 由于需要手工 计算所 以非 常繁琐而 耗时。图 1是国外部分研究者得 到的司机反应时 间分 布情 况 J 。 从图中可以看出 , 随着不 同的研究手段 、 方法 和对 象 , 所得 到的司
驾驶员反应时间研究
摘
要 :对 于预警类智能辅助 驾驶 系统 ,驾驶 员的反 应时间是 一个重要 参数 。本 文针对 不同的驾驶 员类型、不 同的预警
方式,在 实车测试平 台上进行 驾驶 员反 应时 间的测量 。通过 实验可 以得 出各种情 况下不同的驾驶员反应时 间,该研 究的 成果将 对预 警类智能辅助驾驶 系统 中预警方式和预警 时间的选取起到积极 的作 用。
关键词 :汽车驾驶 ;驾驶 员;反应时 间;智能辅助驾驶 系统
中图分 类号 :U4 7 1 . 3
DOI :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 — 6 4 7 8 . 2 0 1 5 . 0 2 . 0 0 5
文献标识码 :A
Re s e a r c h o n Re a c t i o n Ti me o f Dr i v e r
驾驶 员 反 应 时间研 究
耿岚鑫 ’ ,刘凇男 。 ,刘大学
( 1 .交通运输 部公路科 学研 究院汽车运输技术研究 中心 , 北京 1 0 0 0 8 8 ; 2 .交通运输部路网监测与应急处置中心 ,北京 1 0 0 0 8 8 ; 3 .浙江 交通 职业 技术 学院 , 浙江 杭州 3 1 1 1 1 2)
B e i j i n g 1 0 0 0 8 8 ,C h i n a ;2 . H i g h w a y Mo n i t o i r n g Re s p o n s e C e n t e r Mi n i s t r y o f T r a n s p o t, B r e i j i n g 1 0 0 0 8 8 ,C h i n a ;3 . Z h  ̄ i a n g I n s t i ut t e o f C o mmu n i c a t i o n s , Z h e j i a n g Ha n g z h o u 3 1 1 1 1 2 ,C h i n a )
基于虚拟现实技术的驾驶员反应能力测试
基于虚拟现实技术的驾驶员反应能力测试驾驶员反应能力是衡量一个驾驶员是否具备良好驾驶技能的重要指标之一。
为了准确评估驾驶员的反应能力,虚拟现实技术为我们提供了一种全新的测试方法。
通过模拟真实驾驶场景,在虚拟现实环境中进行驾驶员的反应能力测试,不仅能够安全、有效地评估驾驶员的技能水平,而且能够为驾驶员提供真实的驾驶体验。
虚拟现实技术利用计算机生成的视觉和听觉等感官信息,让驾驶员感觉自己置身于真实驾驶环境中。
通过佩戴虚拟现实头盔、手套等设备,驾驶员可以体验到真实驾驶的感觉,包括刹车、加速、转弯等操作。
在虚拟现实环境中,驾驶员可以面对各种复杂的交通情况和突发事件,如途中突然出现障碍物、前车急刹车等。
通过观察和分析驾驶员在虚拟现实环境中的反应和决策,可以客观地评估驾驶员的反应能力和应对突发事件的能力。
虚拟现实技术在驾驶员反应能力测试中的应用有多重优势。
通过虚拟现实技术进行测试,不需要实际上路驾驶,避免了测试过程对驾驶员的安全风险。
驾驶员在虚拟现实环境中进行测试,可以消除外界干扰和安全风险,确保测试结果的准确性和可靠性。
虚拟现实技术可以创造更多的测试场景和情景,以提高测试的全面性和科学性。
在虚拟现实环境中,驾驶员可以面对不同的交通状况、路况、天气等变化,以及各种突发事件,如行人突然闯入、强风、重雨等。
通过模拟不同的情景,可以充分考察驾驶员在各种条件下的反应能力和应对能力。
虚拟现实技术还可以提供实时反馈和数据分析。
通过监测驾驶员的身体姿势、眼动、心率等生理指标,结合虚拟现实环境中的行为数据,可以实时评估驾驶员的反应能力和决策过程。
同时,利用数据分析技术,可以进一步深入研究驾驶员的行为模式和认知过程,为驾驶员的培训和训练提供更加精准的指导。
虚拟现实技术的应用也有一些挑战和限制。
虚拟现实系统的成本较高,包括设备和软件的开销,限制了其大规模应用和推广。
在虚拟现实环境中进行测试时,驾驶员可能会在一些细节方面感受到不逼真或者不真实,这可能会对测试结果产生一定的影响。
车载测试中的车辆驾驶员行为评估方法
车载测试中的车辆驾驶员行为评估方法随着汽车科技的不断进步和智能驾驶技术的发展,车载测试在汽车行业中扮演着越来越重要的角色。
在车载测试中,评估驾驶员的行为是一项关键任务,它可以提供有关驾驶员性能和驾驶行为的宝贵信息。
本文将介绍一些常用的车辆驾驶员行为评估方法,以帮助读者更好地了解和应用这些技术。
一、观察法观察法是最基本且经典的车辆驾驶员行为评估方法之一。
该方法通过仔细观察和记录驾驶员的行为,包括刹车时间、车辆加速度、转向动作等。
观察法可以帮助评估驾驶员的注意力、反应速度和操控能力等因素,但它也存在主观性高、容易受到观察者主观偏见的缺点。
二、生理指标测量法生理指标测量法是一种客观评估驾驶员行为的方法。
通过测量驾驶员的生理指标,如心率、皮肤电阻、眼动等,可以对驾驶员的情绪和注意力水平进行评估。
这些生理指标可以通过传感器和设备实时监测和记录,提供有关驾驶员心理状态的关键信息。
然而,生理指标测量法可能受到个体差异和环境干扰的影响,需要进行进一步的统计和数据分析。
三、行为模型和算法行为模型和算法是利用计算机视觉和机器学习技术来评估驾驶员行为的方法。
通过分析和识别驾驶员的动作、姿势以及面部表情等,可以提供更精确和客观的驾驶员行为评估结果。
行为模型和算法可以基于大规模数据集进行训练和优化,从而提高其准确性和鲁棒性。
然而,行为模型和算法也存在一定的局限性,如对于复杂和不确定的驾驶情境可能表现不佳。
四、虚拟现实技术虚拟现实技术是一种基于计算机生成的仿真环境的评估方法。
驾驶员可以在虚拟现实环境中进行真实驾驶行为的模拟,从而评估其驾驶技能和行为表现。
虚拟现实技术可以模拟各种驾驶情境,并且具有较高的控制性和可重复性。
然而,虚拟现实技术也存在真实性和外部环境因素模拟的挑战,并且对设备和技术的要求较高。
总结车载测试中的车辆驾驶员行为评估方法多种多样,每种方法都有其独特的优势和适用范围。
观察法提供了第一手的直接观察和记录数据,但主观性高;生理指标测量法可以客观评估驾驶员的生理状态,但需要考虑个体差异和环境干扰;行为模型和算法通过计算机视觉和机器学习技术提供更精确的评估结果,但仍存在局限性;虚拟现实技术可以模拟真实驾驶环境进行评估,但对设备和技术要求较高。
汽车跟驰状态下驾驶员反应时间研究
汽车跟驰状态下驾驶员反应时间研究作者:杨林邢翠芳赵海冰来源:《计算技术与自动化》2015年第03期摘要:驾驶员反应时间是评价驾驶安全性的重要指标之一。
本研究采用互相关分析法与灰色关联分析法相结合的方式对驾驶员反应时间进行标定,并结合简单反应时间、复杂反应时间双正态分布的理论假设,通过大量的实测数据对假设的合理性进行验证。
结果表明,理论假设能够很好地解释反应时间的实测数据,反应时间的实测数据可以由这两个正态分布的混合分布来拟合。
对跟驰状态下反应时间的深入研究,为驾驶员形成进一步的行动方案和提升驾驶安全性提供重要的理论参考。
关键词:车辆跟驰;反应时间;标定中图分类号:U491.2 文献标识码:A1引言驾驶员反应时问是交通仿真系统中一个重要的参数,它指的是驾驶员从感知到周围环境发生改变到做出响应所需要的时间。
在仿真中,从驾驶员接受刺激到作出反应动作的时间延迟,就是驾驶员反应时间。
在一些车辆移动模型的研究中,驾驶员反应时间一般都是根据以往反应时间的研究成果直接确定一个合理值,而较少考虑到是否完全符合真实的驾驶员反应时问。
显然不同驾驶员的反应时间是不同的,应结合实际数据对每个驾驶员的反应时间进行标定。
估计反应时间主要有两类方法:一类是通过室内实验,模拟驾驶得到,另一类是通过分析跟驰数据得到。
第一类方法需要相应的实验设备和规范的实验流程设计,Ma等详细综述了第一类方法。
对第二类方法,学者们常通过分析相对速度与加速度序列之间的延迟来估计反应时问,采用的方法有互相关分析法(Gazis)、图像法(Ozaki)等。
本文采用第二类方法,分别采用互相关分析法与灰色关联分析法对加速度序列与相对速度序列的延迟关系进行量化分析,以此对相应的反应时间进行标定。
2反应时间分析2.1影响因素交通心理学指出,影响驾驶员反应时间的因素有:1)驾驶员是否处于准备阶段;2)刺激物出现的缓急;3)练习的因素;4)年龄与性别的因素;5)手和脚的差异;6)情绪状态的因素;7)疲劳和单调对反应的影响;8)车速对反应时问的影响;9)酒、药物对反应时间的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本技术涉及一种实车条件下的驾驶员反应时间测量系统及方法,驾驶员佩戴眼动仪,通过眼动仪捕捉突发状况时驾驶员眼球聚焦点位置变化,判断驾驶员在突发状况下是否发生反应;整个系统搭建在实车上;包括行车电脑模块、驾驶员眼动信息采集模块、踏板压力信息采集模块、和时间同步信号模块,驾驶员眼动信息采集模块、踏板压力信息采集模块和时间同步信号模块分别与行车电脑模块连接;以该时刻作为踏板压力信息采集模块和驾驶员眼动信息采集模块采集数据的时间对标时刻点,使后续采集的踏板压力数据与眼动仪采集的数据实现时间同步,排除不同设备采集驾驶员反应时间时间起始点不同步带来的系统误差,测量结果更加准确。
权利要求书1.一种驾驶员反应时间测量方法,基于实车条件下的驾驶员反应时间测量系统进行,整个系统搭建在实车上,至少包括:行车电脑模块、驾驶员眼动信息采集模块、踏板压力信息采集模块、和时间同步信号模块;驾驶员眼动信息采集模块、踏板压力信息采集模块和时间同步信号模块分别与行车电脑模块连接;其中:行车电脑模块,包括行车电脑以及行车电脑上的上位机软件与眼动仪软件;驾驶员眼动信息采集模块,包括驾驶员佩戴的测量驾驶员眼部活动状态的眼动仪,眼动仪的输出端与行车电脑相连;踏板压力信息采集模块,在汽车制动踏板上装有压力传感器,用于采集踏板踩踏信号;时间同步信号模块,包括LED灯与微处理器,LED灯与微处理器相连,微处理器输入端与行车电脑相连;其特征在于:驾驶员佩戴眼动仪,通过眼动仪捕捉突发状况时驾驶员眼球聚焦点位置变化,判断驾驶员在突发状况下是否发生反应;具体包括如下步骤:步骤1:上位机软件控制LED灯点亮并记录LED灯点亮的时刻T1’,同时,眼动仪也实时拍摄到LED灯点亮并由眼动仪软件记录下LED灯点亮时刻T1;步骤2:在LED灯点亮之后,在突发状况时,眼动仪捕捉驾驶员眼球聚焦点位置变化,并记录驾驶员发现突发情况时眼球聚焦点位置变化的时刻T3;步骤3:驾驶员在识别到突发状况后踩踏踏板,上位机软件记录驾驶员踩踏踏板引起压力数字信号突变的时刻T2;步骤4:上位机软件最后由(T2-T1’)-(T3-T1)计算得到驾驶员反映时间。
2.根据权利要求1所述的驾驶员反应时间测量方法,其特征在于:所述踏板压力信息采集模块,包括压力传感器、运算放大器、A/D转换器、微处理器和串口电路;运算放大器与压力传感器输出端相连接,运算放大器输出端连接A/D转换器,A/D转换器的输出端与微处理器的信号输入端相连,微处理器输出端通过串口电路与行车电脑相连。
3.根据权利要求1所述的驾驶员反应时间测量方法,其特征在于:所述微处理器由单片机实现,通过外部计算机通信接口向微处理器内写入处理算法程序。
4.根据权利要求1所述的驾驶员反应时间测量方法,其特征在于:步骤1中行车电脑上的上位机软件下达点亮LED灯的指令并传输给微处理器,微处理器接收该指令并执行指令点亮LED 灯,上位机软件记录下LED灯点亮的时刻T1’;同时眼动仪拍摄到LED灯点亮,眼动仪软件同时记录下LED灯点亮的时刻T1。
5.根据权利要求1所述的驾驶员反应时间测量方法,其特征在于:驾驶员眼动信息采集模块采集的数据以驾驶员眼部活动状态中眼球聚焦点的坐标点进行分类,以驾驶员眼球聚焦点在正前方无穷远点为坐标原点,分别将驾驶员眼球聚焦点在直角坐标系中的不同位置实时传输给行车电脑上的眼动仪软件;眼球聚焦点在直角坐标系中不同位置是指普通机动车的七个视觉区域:正前方、左车窗、右车窗、左倒车镜、右倒车镜、后视镜、仪表盘。
技术说明书实车条件下的驾驶员反应时间测量方法技术领域本技术属于汽车驾驶辅助系统,具体涉及在试验中测量驾驶员在实车条件下反应时间的系统和方法;解决不同采集装置在采集数据时的时间同步问题。
背景技术近年来我国汽车工业与交通事业飞速发展,造成城市交通拥挤现象相当严重,道路交通环境愈加复杂。
在这样的交通环境下,对驾驶员辅助驾驶系统的准确度和精度都提出了更高的要求。
为了设计精度更高的辅助驾驶系统,需要对驾驶员驾驶行为、反映时间有更准确的认识。
在驾驶模拟器上进行实验,没有全面考虑到实际驾驶环境,缺乏真实的实验条件,所测得的反应时间只是驾驶员在识别—判断—操作整个反映过程中局部的反应时间,忽略驾驶员在识别过程中注意力转移的反应时间。
另外,识别过程和操作过程的数据采集通过不同的仪器设备来完成,由于不同设备采集过程的独立性,记录的初始时间不同步,造成系统误差。
技术内容本技术要解决的技术问题是,针对测量驾驶员反应时间的实验条件有限、测量数据准确度不高的情况,以实车实验为基础,提供一种在实车条件下驾驶员反应时间的系统测量方法,避免忽略驾驶员在识别过程中注意力转移的反应时间,能够在实际道路上测量驾驶员反应时间与注意力分配模式,为更精确地测量驾驶员反应时间这一指标提供解决方案。
本技术为解决上述技术问题采用如下技术方案:一种实车条件下的驾驶员反应时间测量系统,其特征在于整个系统搭建在实车上,至少包括:行车电脑模块、驾驶员眼动信息采集模块、踏板压力信息采集模块、和时间同步信号模块;驾驶员眼动信息采集模块、踏板压力信息采集模块和时间同步信号模块分别与行车电脑模块连接;其中:行车电脑模块,包括行车电脑以及行车电脑上的上位机软件与眼动仪软件;驾驶员眼动信息采集模块,包括驾驶员佩戴的测量驾驶员眼部活动状态的眼动仪,眼动仪的输出端与行车电脑相连;踏板压力信息采集模块,在汽车制动踏板上装有压力传感器,用于采集踏板踩踏信号;时间同步信号模块,包括LED灯与微处理器,LED灯与微处理器相连,微处理器输入端与行车电脑相连。
进一步的,所述踏板压力信息采集模块,包括压力传感器、运算放大器、A/D转换器、微处理器和串口电路;运算放大器与压力传感器输出端相连接,运算放大器输出端连接A/D转换器,A/D转换器的输出端与微处理器的信号输入端相连,微处理器输出端通过串口电路与行车电脑相连。
进一步的,所述微处理器由单片机实现,通过外部计算机通信接口向微处理器内写入处理算法程序。
一种驾驶员反应时间测量方法,其特征在于:采用上述实车条件下的驾驶员反应时间测量系统,驾驶员佩戴眼动仪,通过眼动仪捕捉突发状况时驾驶员眼球聚焦点位置变化,判断驾驶员在突发状况下是否发生反应;具体包括如下步骤:步骤1:上位机软件控制LED灯点亮并记录LED灯点亮的时刻 T1’,同时,眼动仪也实时拍摄到LED灯点亮并由眼动仪软件记录下LED灯点亮时刻T1;步骤2:在LED灯点亮之后,在突发状况时,眼动仪捕捉驾驶员眼球聚焦点位置变化,并记录驾驶员发现突发情况时眼球聚焦点位置变化的时刻T3;步骤3:驾驶员在识别到突发状况后踩踏踏板,上位机软件记录驾驶员踩踏踏板引起压力数字信号突变的时刻T2;步骤4:上位机软件最后由(T2-T1’)-(T3-T1)计算得到驾驶员反映时间。
进一步的,步骤1中行车电脑上的上位机软件下达点亮LED灯的指令并传输给微处理器,微处理器接收该指令并执行指令点亮 LED灯,上位机软件记录下LED灯点亮的时刻T1’;同时眼动仪拍摄到LED灯点亮,眼动仪软件同时记录下LED灯点亮的时刻T1。
进一步的,驾驶员眼动信息采集模块采集的数据以驾驶员眼部活动状态中眼球聚焦点的坐标点进行分类,以驾驶员眼球聚焦点在正前方无穷远点为坐标原点,分别将驾驶员眼球聚焦点在直角坐标系中的不同位置实时传输给行车电脑上的眼动仪软件;眼球聚焦点在直角坐标系中不同位置是指普通机动车的七个视觉区域:正前方、左车窗、右车窗、左倒车镜、右倒车镜、后视镜、仪表盘。
由此,本测量系统通过眼动仪捕捉驾驶员眼球聚焦点位置变化的方法判断驾驶员在突发状况下(如前车紧急刹车或前车突然变道等)是否发生反应并记录相应时刻,测量结果客观、精确。
本技术测量系统通过上位机软件解决不同采集设备数据采集过程中时间不同步问题,通过上位机软件控制LED灯点亮并记录对应时刻,同时眼动仪也实时拍摄到LED灯点亮并由眼动仪软件记录下 LED灯点亮时刻,以该时刻作为踏板压力信息采集模块和驾驶员眼动信息采集模块采集数据的时间对标时刻点,使后续采集的踏板压力数据与眼动仪采集的数据实现时间同步,便于在同一个时间坐标系中采集数据,进而计算驾驶员反映时间,排除不同设备采集驾驶员反应时间时间起始点不同步带来的系统误差,测量结果更加准确。
本测量系统可用于实车在真实道路交通环境中进行实验,通过上位机软件实现眼动仪数据采集、压力传感器数据采集的时间同步,消除了不同装置采集数据时间不同步的系统误差,测量结果真实可靠,实用性强。
附图说明附图1为本技术的系统结构示意图。
附图2为本技术踏板压力信息采集模块的运算放大器电路原理图。
附图3为本技术踏板压力信息采集模块的串口电路原理图。
附图4为本技术时间同步信号模块的电路原理图。
附图5为本技术驾驶员反应时间的测量原理示意图。
具体实施方式实施例1:如图1所示,根据被技术实施的实车条件下的驾驶员反应时间测量系统,其组成包括:行车电脑模块、驾驶员眼动信息采集模块、踏板压力信息采集模块和时间同步信号模块,驾驶员眼动信息采集模块、踏板压力信息采集模块和时间同步信号模块分别与行车电脑模块连接,整个系统搭建在实车上。
所述行车电脑模块包括行车电脑以及行车电脑上的上位机软件与眼动仪软件;所述驾驶员眼动信息采集模块包括可供驾驶员佩戴的测量驾驶员眼部活动状态的眼动仪,眼动仪的输出端与行车电脑相连;所述踏板压力信息采集模块包括压力传感器、运算放大器、A/D转换器、微处理器与串口电路,在汽车制动踏板上装有采集踏板踩踏信号的压力传感器,与压力传感器的输出端相连接的是运算放大器,与运算放大器输出端相连接的是A/D转换器,其中A/D 转换器的输出端与微处理器的信号输入端相连,微处理器输出端通过串口电路与行车电脑相连;所述时间同步信号模块包括LED灯与微处理器,LED灯与微处理器相连,微处理器输入端与行车电脑相连。
优选所述微处理器由单片机实现,通过外部计算机通信接口向微处理器内写入处理算法程序。
如图2的踏板压力信息采集模块的运算放大器电路原理图、图3 的踏板压力信息采集模块的串口电路原理图。
实施例1中的踏板压力信息采集模块,由踏板压力传感器采集压力模拟信号并传输给运算放大器,运算放大器将模拟信号放大并传输给A/D转换器,A/D转换器将模拟信号转换为数字信号并传输给微处理器,微处理器通过串口电路将数字信号传输给行车电脑,由行车电脑上的上位机软件采集并记录该压力数字信号。
其中,图2踏板压力信息采集模块的运算放大器电路原理图所示的是压力传感器采集的信号的放大原理。
压力传感器的输出端与 op37的2脚(反相输入端)连接,反相比例运放的3脚(同相输入端)接地电阻R2取5KΩ,电容C1将运放增益配比平衡化;6脚(输出端)接电阻R4构成闭环,电容C3起滤波作用;7脚(正电源) 和4脚(负电源)分别接+15V和-15V电源;1脚(失调电压调零端) 和8脚(失调电压调零端)之间可接一个100KΩ的精密多圈可调电阻器,动触点接+15V 电源,电容C2起滤波作用;6脚(输出端) PAD与A/D转换器的输入端连接;5脚为空脚。