小型棉花打包机机构及控制系统设计
山东天鹅400T棉花打包机液压原理图的油路工作状态详细说
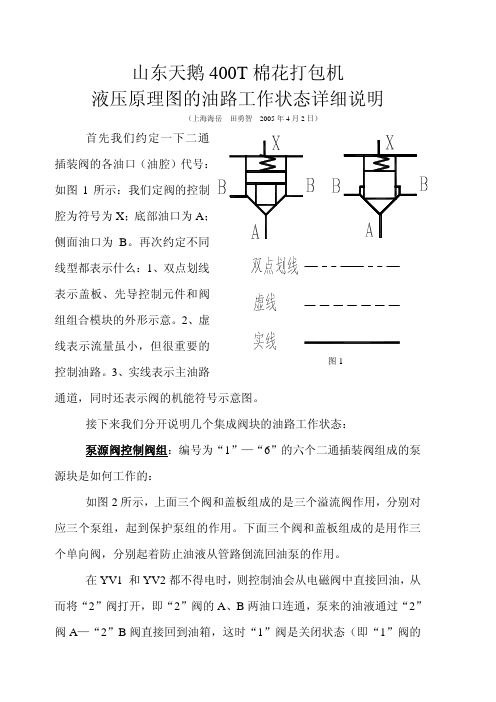
山东天鹅400T棉花打包机液压原理图的油路工作状态详细说明(上海海岳田勇智 2005年4月2日)首先我们约定一下二通插装阀的各油口(油腔)代号:如图1所示:我们定阀的控制腔为符号为X;底部油口为A;侧面油口为B。
再次约定不同线型都表示什么:1、双点划线表示盖板、先导控制元件和阀组组合模块的外形示意。
2、虚线表示流量虽小,但很重要的控制油路。
3、实线表示主油路通道,同时还表示阀的机能符号示意图。
图1接下来我们分开说明几个集成阀块的油路工作状态:泵源阀控制阀组:编号为“1”—“6”的六个二通插装阀组成的泵源块是如何工作的:如图2所示,上面三个阀和盖板组成的是三个溢流阀作用,分别对应三个泵组,起到保护泵组的作用。
下面三个阀和盖板组成的是用作三个单向阀,分别起着防止油液从管路倒流回油泵的作用。
在YV1 和YV2都不得电时,则控制油会从电磁阀中直接回油,从而将“2”阀打开,即“2”阀的A、B两油口连通,泵来的油液通过“2”阀A—“2”B阀直接回到油箱,这时“1”阀是关闭状态(即“1”阀的A、B两油口处于断开状态,不连通)。
当电磁铁YV1得电时,两个压力调节溢流中起作用的是6.3MPa的阀,此时“1”阀是关闭状态(即“1”阀的A、B两油口不连通),从相应油泵来的油会打开“2”阀(将“2”阀的A、B连通),将油输送到主缸控制阀组和脱箱缸控制阀组。
当电磁铁YV2得电时,只是两个压力调节溢流中起作用的是20MPa 的阀,而且“1”阀和“2”阀与上面YV1得电时情况相同。
将油输入送图2到主缸控制阀组和脱箱缸控制阀组。
第二个阀组合(即“3”阀和“4”阀),YV3不得电情况下,原理同上面一样,泵来的油液直接通过“3”阀回到油箱,当YV3得电时,控制油路会将“3”阀芯关闭,从而油液打开“4”阀,连通“4”阀的A、B 两油口,将油液送入主缸控制阀组和脱箱缸控制阀组。
第三个阀组合(即和“6”阀)与上面第二个阀组合完全相同,只是回油的油路与前面两个阀组合的回油路没有相连,这是为以后主油缸的“快进二”考虑的。
一种棉花离线打包系统的设计

第52卷㊀第1期2024年1月㊀㊀林业机械与木工设备FORESTRYMACHINERY&WOODWORKINGEQUIPMENTVol52No.1Jan.2024研究与设计一种棉花离线打包系统的设计赵子豪ꎬ㊀姚㊀庆∗(南通大学机械工程学院ꎬ江苏南通226019)摘㊀要:现有棉花打包生产线无法满足新疆地区新的打包方式对自动化生产的需求ꎬ针对该问题设计了一种棉花离线打包系统ꎮ在设计的棉花离线打包系统中ꎬ选择了运输机械手的夹持器和手臂关节作为研究对象ꎬ利用SolidWorks软件创建了机械设备的三维模型ꎮ在ANSYS工作台的有限元软件中ꎬ对研究对象进行了受力分析ꎬ以评估其结构强度并进行轻量化设置ꎮ不仅为棉花打包系统的质量提升提供了新的技术ꎬ节约了制造成本ꎬ也减少了动力输出ꎬ更好地满足了节能㊁低碳和环保的要求ꎬ并且符合新疆地区新的打包方式的需求ꎮ同时ꎬ这种离线打包系统也可以为林业产业提供更多的机械设备选择ꎬ促进林业的可持续发展和利用ꎮ关键词:棉花离线打包ꎻ自动化生产线ꎻ静力学分析ꎻ三维建模中图分类号:TH69ꎻTS112.1㊀㊀文献标识码:A㊀㊀文章编号:2095-2953(2024)01-0025-05Designofacottonoff-linepackagingsystemZHAOZi ̄haoꎬYAOQing∗(SchoolofMechanicalEngineeringꎬNantongUniversityꎬNantongJiangsu226019ꎬChina)Abstract:InviewofthefactthattheexistingcottonbalingproductionlinecouldnotmeetthedemandforautomaticproductionofnewbalingmethodsinXinjiangꎬacottonoff-linebalingsystemwasdesigned.Inthedesignedcottonoff-linebalingsystemꎬthegripperandarmjointsofthetransportmanipulatorwereselectedastheresearchobjectsꎬandthethree-dimensionalmodelofthemechanicalequipmentcontainedinthecottonoff-linebalingsystemwascre ̄atedbyusingSolidWorkssoftware.ThenꎬintheANSYSWorkbenchInthefiniteelementsoftwareꎬaforceanalysiswascarriedoutonthestudyobjecttoevaluateitsstructuralstrengthandtosetitlightly.ItnotonlyprovidesnewtechnologyforthequalityimprovementofthecottonbalingsystemꎬsavesmanufacturingcostsꎬbutalsoreducespoweroutputꎬbettermeetstherequirementsofenergysavingꎬlowcarbonandenvironmentalprotectionꎬandmeetstheneedsofnewbalingmethodsinXinjiang.Atthesametimeꎬthisoff-linepackagingsystemcanalsoprovidemoremechanicalequipmentoptionsfortheforestryindustryandpromotethesustainabledevelopmentandutilizationoffor ̄estry.Keywords:packagingcottonofflineꎻautomaticproductionlineꎻstaticanalysisꎻthree-dimensionalmodeling㊀㊀收稿日期:2023-09-01第一作者简介:赵子豪ꎬ本科生ꎬ主要从事机械设计制造方面研究ꎬE-mail:2010110204@stmail.ntu.edu-cnꎮ∗通讯作者:姚庆ꎬ副教授ꎬ硕士研究生导师ꎬ博士ꎬ主要从事新能源新材料及装备研究ꎮE-mail:yaoqing@ntu.edu.cnꎮ棉花打包机是棉花加工线上的末端设备系统ꎬ其功能是压缩皮棉并捆扎成包ꎬ然后将棉包传送出打包车间ꎮ一条棉花加工线有数台轧花机ꎬ但只配一台棉花打包机ꎮ现有的棉花打包机生产线针对自动化生产的需求只能做到 捆扎带在内ꎬ包装在外 的打包方式[1]ꎮ但是ꎬ近年来随着国家政策的改变ꎬ林业机械与木工设备第52卷我国新疆地区均采用 捆扎带在外ꎬ包装在内 的打包方式[2]ꎬ而现有的棉花生产线并不能实现其自动化生产要求ꎮ针对此缺陷ꎬ本文设计优化棉花打包设备并精心设计了一种棉花离线打包方法ꎬ使其能够对棉包以包裹包的形式进行自动打包并出库ꎮ同时用SolidWorks2017等软件设计出该棉花打包生产设备组ꎬ在此基础上合理简化三维模型[3]ꎮ棉花离线打包系统的关键机械设备是运输机械手ꎮ本文以运输机械手的夹持器和手臂关节作为研究对象ꎬ采用有限元分析法进行轻量化设计ꎬ以期优化机架结构ꎬ降低生产成本[4]ꎮ同时ꎬ对轻量化部件的结构强度进行仿真模拟分析ꎬ以防止夹持器和手臂关节由于外部载荷超过材料极限强度出现结构破坏ꎮ1㊀离线打包系统设计在棉花打包生产线中ꎬ本离线打包生产 裹包 (即先包装后捆扎ꎬ捆扎带在包装袋的外面)过程设计如下:(1)物料(棉纤维)经滑棉道流入喂棉装置内ꎬ送棉油缸(前端安装推棉板)将物料推入前端ꎬ预压油缸下端的踩板将物料压入棉箱ꎻ预压下行到位后ꎬ送棉油缸后退ꎻ送棉油缸后退到位后ꎬ预压油缸后退(向上)ꎬ完成一次预压送棉循环ꎮ(2)预压送棉多次循环将物料压入棉箱ꎬ棉箱内的棉纤维的重量达到217~237kgꎬ用于重量计量的压力继电器发出讯号ꎻ预压送棉动作停止ꎬ打包机开始提箱ꎬ转箱ꎻ转箱之后ꎬ空箱转到预压一侧ꎬ继续进行预压送棉循环ꎬ同时有物料棉箱转到主压一侧ꎮ(3)主压机构(两只主压油缸带动压头)下行压缩物料ꎬ速度由快变慢ꎬ将物料高度压缩至490~500mm时停止ꎮ(4)脱箱油缸(两只)上行将棉箱升起(升起高度为980mm)ꎮ(5)运输机械手按照指定指令工作ꎬ展开夹持器ꎬ伸入打包机压缩部分的指槽里ꎮ(6)运输机械手收缩ꎬ完成夹持动作ꎬ打包机压头开始抬升ꎮ(7)运输机械手夹持压缩原棉层叠体抽出ꎬ转向ꎬ同时棉布吸附机械手开始工作ꎮ(8)棉布吸附机械手将棉布包铺设至指定位置ꎮ(9)运输机械手伸入压缩机械上下压头凹槽处ꎮ(10)压缩机械上压头运行ꎬ将压缩原棉层叠体压至指定位置ꎮ(11)运输机械手展开ꎬ抽出压缩机械ꎮ(12)机械手抽出后ꎬ压缩机械顶部四周有包裹辊子ꎬ辊子随着上压头向下压缩ꎬ使棉布包裹住棉块ꎬ底部压头四周亦有12根包裹辊子ꎬ包裹辊子向上抬升ꎬ将棉布包裹住ꎻ上层棉布长于棉块的一半ꎬ底层棉布长度为棉块的一半ꎻ上压头包裹辊子长于下压头包裹辊子ꎻ压缩过程中ꎬ上压头周围辊子先完成包裹动作ꎬ完成后继电器驱动下压头辊子完成包裹动作ꎮ(13)操作人员触发捆扎机动作ꎬ捆扎机自动完成穿带㊁切断㊁焊接后ꎬ自动退回原始待机位置ꎮ(14)接运小车将包裹包运输至仓库ꎮ图1㊀棉花离线打包系统装配示意图图1所示为一种棉花离线打包系统ꎬ包括沿着流水线工位顺次排布的打包机㊁压缩包裹机构㊁捆扎机以及接包小车ꎮ在打包机与压缩包裹机构之间布设棉布吸附机构和运输机械手ꎬ位于打包机与压缩包裹机构之间的棉布吸附机构将底层棉布铺设至压缩包裹机构内指定位置ꎬ打包机在运输机械手辅助下ꎬ将棉花压缩形成原棉层叠体后将其夹取放置在铺设底层棉布的压缩包裹机构内ꎻ在压缩包裹机构和捆扎机之间同样布设一个棉布吸附机构ꎬ其将顶层棉布铺设至压缩包裹机构内指定位置ꎬ压缩包裹机构启动后ꎬ同时进行压缩与包裹操作ꎻ其中ꎬ打包机向棉花施加的力与运输机械手辅助时施加的力形成垂直关系ꎬ且运输机械手的施力端与打包机压缩端结构匹配ꎮ棉花离线打包流程图如图2所示ꎮ2㊀静力学分析2.1㊀三维建模与材料定义如图3所示ꎬ棉花离线打包系统包括打包机[7]㊁运输机械手㊁棉布吸附机构1㊁棉布吸附机构2㊁压缩包覆机械㊁捆扎机㊁接包小车及控制系统ꎮ据使用工况和结构特点ꎬ棉花离线打包系统中ꎬ运输机械手完成夹持运输工作是直接影响棉花打包生产效率的关62第1期赵子豪ꎬ等:一种棉花离线打包系统的设计图2㊀棉花离线打包流程图键ꎮ其上的夹持器是支承压缩棉花过程的主要部分ꎬ其强度㊁刚度对运输机械手能否完成压缩过程影响巨大ꎮ运输机械手的夹持器需要在减轻自重的同时具有强度高㊁风阻载荷小㊁装拆方便㊁承受载荷能力强等优点ꎮ为此ꎬ从现代设计理念中ꎬ夹持器外端采用由圆形型材构成的结构ꎬ总风力系数要小于直边型材构成的结构ꎬ夹持器工作方式为左右行进夹持ꎬ棉花在压缩过程中由于抵抗压缩力ꎬ极易回弹ꎬ其弹力主要集中于正面ꎬ对夹持器来说棉花压缩过程中的压缩力主要表现为正压力ꎬ因此采用水平行进压缩的楔形滑块机构可以最大程度上解决棉花压缩过程中回弹的问题ꎬ但是正面的压力对夹持器的爪齿的强度有着极高要求ꎬ当棉花压缩过程中由棉花回弹引起外部载荷超过夹持器材料极限强度时会导致其发生形变甚至断裂而无法完成夹持任务ꎮ手臂关节是运输机械手能否完成运输动作的关键ꎬ其强度㊁刚度对运输机械手能否完成运输过程影响巨大ꎬ当棉花压缩过程中ꎬ由夹持器㊁楔形滑块驱动机构㊁压缩原棉层叠体的自重引起外部载荷超过关节材料极限强度时会导致手臂关节发生形变甚至断裂ꎮ同时ꎬ考虑到运输机械手制造加工㊁组装㊁运输以及臂的长度调整的方便性ꎬ如图4所示ꎬ通过三维建模软件创建运输机械手的结构模型ꎮ对其部件组成的组焊件部分ꎬ复杂细微的结构较多ꎬ需要优化的工艺细节较多ꎬ故建模过程中ꎬ像倒角㊁焊缝等细微的结构特征未加以细化[8]ꎮ这种方法更容易产生一个结构化的模型ꎬ同时还能改善运算的速度ꎮ运输机械手主体材料为合金结构钢材料(Q355B)ꎬ其材料密度等属性的具体定义见表1ꎮ图3㊀棉花离线打包系统布局示意图1.打包机ꎻ2.棉布吸附机构1ꎻ3.压缩包裹机构ꎻ4.运输机械手ꎻ5.捆扎机ꎻ6接包小车ꎻ7棉布吸附机构2图4㊀运输机械手三维Solidworks建模结构示意图1.底座ꎻ2.转动机构ꎻ.3.躯干ꎻ4.手臂ꎻ5.手部关节ꎻ6.楔形滑块外框ꎻ7.气缸ꎻ8.楔形滑块机构1ꎻ9.楔形滑块机构2ꎻ10.夹持机构ꎻ11.手指ꎻ12.滑槽表1㊀材料定义材料名称材料密度/g cm-3杨氏弹性模量/GPa屈服强度/MPa抗拉强度/MPa泊松比Q355B结构钢7.80206355470~6300.32.2㊀网格划分与载荷约束(1)夹持器长1.4mꎬ单侧上㊁下各有8根爪齿ꎻ爪齿长0.75mꎬ高0.6mꎬ齿宽0.1mꎬ齿与齿间间隔0.06mꎮ将其组件均设计为U型结构ꎬ用于抵抗棉花回弹过程中竖直方向上的分力ꎬ大厚度(10mm)可以增加夹持部件工作时的弹力承受能力ꎬ能够拥有更长的使用寿命ꎮ采用10mm的网格划分ꎬ同时采用四面体网格的划分形式[9]ꎬ生成的网格图如图5所示ꎮ72林业机械与木工设备第52卷图5㊀夹持器网格划分针对夹持器所受载荷ꎬ载荷施加方主要为夹持压缩棉花层叠体时ꎬ由于棉花回弹ꎬ夹持器爪齿受到正面压力作用ꎮ约束的添加方式是底部与侧面安装面均采用ANSYS工作台中自带的FixedSupported固定支撑ꎮ棉花回弹过程中产生的正面压力计算如下:棉花加工厂均采用额定压缩力ȡ4000kN(400t)㊁生产的棉包包型尺寸为1400mmˑ530mmˑ700mm(长ˑ宽ˑ高)㊁棉包重量227ʃ10kg的打包机ꎮ当H=0.5时ꎬ其压缩力计算如下:ρ压缩=GL W H=2271.4ˑ0.53ˑ0.5=611.86kg/m3(1)P正=ρ压缩Aæèçöø÷3=611.86178.95æèçöø÷3=39.97(2)P压=P S=39.97ˑ140ˑ53=2966kN(3)当H=0.7时ꎬ其压缩力计算如下:ρ压缩=GL W H=2271.4ˑ0.53ˑ0.7=437.04kg/m3(4)P正=ρ压缩Aæèçöø÷3=437.04178.95æèçöø÷3=14.5(5)P压=P S=14.57ˑ140ˑ53=1081kN(6)棉包长度L=1.36mꎬ棉包宽度W=0.5mꎬ棉箱高度=2.65mꎬ最终压缩高度=0.5mꎬ棉包重量G定为230kgꎬ爪齿受力由如下计算可得:棉包压缩至0.5m时ꎬ所受最大压缩力为392tꎮ此时爪齿受力:F=392016=245kN(7)棉包压缩至0.7米时ꎬ所受最大压缩力为108吨ꎮ此时爪齿受力:F=108016=67.5kN(8)运输机械手夹持器受压面积为:S=25000ˑ16=400000mm2(9)棉块压缩过程中所受最大压缩力为3920kNꎬ故夹持器爪齿在夹持过程中所受最大正向压力为:P=FS=392000040=98000Pa(10)对其进行Ansys静态压力分析ꎬ选取外框上下表面固定为支撑面ꎬ对其爪齿进行压力分析ꎬ所加压力位0.098MPaꎬ材料选取为合金结构钢ꎮ(2)手臂关节同样采用10mm的网格划分ꎬ同时选择自动网格划分形式ꎬ生成的网格图如图6所示ꎮ图6㊀手臂关节网格划分手臂关节前面所安装的夹持机构体积约为V=905850ˑ1600=1449360000mm3(11)其材料结构钢的密度为ρ=7.80ˑ10-6kg/mm3故所述夹持机构的重量约为G=mg=vρg=1449360000ˑ7.80ˑ10-6=113774.76N(12)因此关节处所受静态拉力为113774.76Nꎬ选取运输机械手连接夹持器关节处进行Ansys静态结构分析ꎬ向下施加一个大小为113774.76N的力ꎬ分析其受力的状态ꎮ2.3㊀结果分析通过ANSYS的计算求解得出负载下的夹持器和手臂关节的应力㊁位移云图ꎬ如图7~10所示[10]ꎮ由图7~10可知负载状态下夹持器承受的最大应力为5.59MPaꎬ其数值远小于屈服极限235MPaꎬ最大位移为0.0017mmꎮ负载状态下手臂关节承受的最大应力为11.275MPaꎬ数值上远小于屈服极限235MPaꎬ最大位移为0.057mm[11]ꎮ负载状态下的变形量对运输机械手的夹持器和转动关节的整体影响有限ꎬ即分析显示二者的应力冗余量都比较大[12]ꎬ优化时可考虑降低运输机械手夹持器和转动82第1期赵子豪ꎬ等:一种棉花离线打包系统的设计关节的材料厚度ꎬ减轻部件的自重和降低其动力输出ꎬ从而更好地满足节能㊁低碳㊁环保的要求[13]ꎮ图7㊀负载状态下夹持器应力云图图8㊀负载状态下夹持器位移云图图9㊀负载状态下手臂关节应力云图图10㊀负载状态下手臂关节位移云图3㊀结论本文基于有限元法ꎬ以自设计的棉花离线打包系统中运输机械手的夹持器和手臂关节作为研究对象ꎬ在弹力负载状态下ꎬ进行结构受力分析ꎮ根据棉花压缩过程中会回弹的特性ꎬ压缩时ꎬ在保证工作部件结构安全的同时ꎬ对运输机械手进行轻量化的设计及优化ꎮ本文采用有限元分析法以自设计的棉花离线打包系统中 运输机械手的夹持器和手臂关节作为研究对象进行轻量化设计ꎬ以期优化机架结构ꎬ降低生产成本[14]ꎮ同时ꎬ对轻量化部件的结构强度进行仿真模拟分析ꎬ以防止夹持器和手臂关节由于外部载荷超过材料极限强度产生结构破坏ꎮ对其进行有限元仿真发现其结构受力稳定ꎬ运输机械手夹持器在负载状态下其最大应力为5.59MPaꎬ而手臂关节负载状态下最大应力为11.275MPaꎬ均远小于机架材料定义的屈服极限235MPaꎬ说明机架材料应力余量较大ꎬ可进行轻量化[15]ꎮ因此ꎬ本文通过有限元法对棉花离线打包的设备产品结构优化设计有重要借鉴意义ꎬ为打包机械 棉花离线打包设备的生产线的轻量化研制与改进ꎬ提供了缩短其设计周期的思路ꎮ参考文献:[1]㊀沈恒龙ꎬ葛乐通.棉花打包捆扎技术的现状分析和建议[J].中国棉花加工ꎬ2012(4):5-7.[2]㊀胡春雷.GB6975«棉花包装»强制性国家标准的应用实施现状[J].中国棉花加工ꎬ2019(1):24-28.[3]㊀郑向华.基于SolidWorks的机械手三维建模设计[J].科技信息ꎬ2012(26):31+33.[4]㊀唐元玉ꎬ何小婷.有限元分析在零件结构优化中的应用[J].纺织器材ꎬ2023ꎬ50(1):30-33.[5]㊀刘佳奇ꎬ邱绪云ꎬ高琦ꎬ等.基于AnsysWorkbench的果园作业机械车架有限元分析[J].农业装备与车辆工程ꎬ2022ꎬ60(12):183-188.[6]㊀陈修龙ꎬ张昊ꎬ蔡从浩.工件搬运机械手平台的结构设计与分析[J].实验科学与技术ꎬ2022ꎬ20(4):1-6.[7]㊀季宏斌ꎬ吴云生.MDY──400型液压棉花打包机系统介绍[J].中国棉花加工ꎬ1998(2):10-11.[8]㊀付宜进ꎬ董立娟ꎬ崔哲.某型随车起重机的参数化有限元分析[J].工程机械ꎬ2022ꎬ53(12):90-95+11-12.[9]㊀李海峰ꎬ吴冀川ꎬ刘建波ꎬ等.有限元网格剖分与网格质量判定指标[J].中国机械工程ꎬ2012ꎬ23(3):368-377.[10]㊀牛浩ꎬ王震涛ꎬ唐玉荣ꎬ等.基于ANSYS的残膜回收机提土筛膜组件机架静力学及模态分析[J].中国农机化学报ꎬ2019ꎬ40(12):190-195.[11]㊀范倚玮ꎬ柯昌靖ꎬ魏德华ꎬ等.基于ANSYS的小型搬运机的结构应力分析[J].科技经济市场ꎬ2021(2):29-30.[12]㊀姚忠福ꎬ张会荣.农用滑移装载机车体有限元分析[J].南方农机ꎬ2023ꎬ54(8):160-162.[13]㊀辛高强ꎬ董丽萍.基于Workbench的粘箱机瓦楞纸板引出辊模态分析与优化[J].包装与食品机械ꎬ2021ꎬ39(6):36-41.[14]㊀张希峰ꎬ巩彬ꎬ陈金利ꎬ等.末端执行器切割机构的有限元分析及优化设计[J].中原工学院学报ꎬ2023ꎬ34(1):59-65.[15]㊀焦万才ꎬ吴洁ꎬ贾征.基于有限元分析的液动三片式矿浆阀密封体轻量化设计[J].沈阳大学学报(自然科学版)ꎬ2023ꎬ35(1):50-55.92。
基于PLC的棉花打包机控制系统设计

基于PLC的棉花打包机控制系统设计作者:潘多来源:《农机使用与维修》2015年第01期摘要本文以PLC为下位机现场控制器,替代传统的继电—接触控制器,设计了一套可对顶式双箱液压棉花打包机控制的人机交互系统。
经生产实践证明,改造后的棉花打包机控制系统可靠性大为提升。
关键词可编程序控制器上位机人机界面可靠性0引言棉花打包机是棉花加工企业中的一种重要生产设备,本文以台达DVP-EH2系列PLC为下位机设计了顶式双箱液压棉花打包机控制系统。
系统配置DVP04AD-H2系列模拟输入模块、16HM11N开关量输入扩展模块、08HNl1lR开关量输出扩展模块、台达DOP-A80THTD1人机界面,同时使用中达电通公司WPLSoftZ.ll编程软件和ScreenEditor软件进行软件设计。
经实践证明,改造后提高了棉花打包机控制系统自动控制水平和可靠性,当系统出现故障时能够自动进行远程诊断服务,极大地提升了生产效率和设备使用寿命,降低了设备故障率和生产成本。
棉花打包机控制系统结构如图1所示。
1系统的硬件设计本系统主要针对下位机PLC、模拟输入模块、开关量输入/输出扩展模块和人机界面的硬件设计。
1.1PLC选型系统主要采用中达电通集团的台达DVP-EH2系列DVP-80EH00R2PLC为现场控制器,DVP-80EH00R2系列PLC采用40路输入、40路输出,运算速度快、存储量大,可外接相应扩展模块,满足系统对扩展功能的要求。
1.2模拟量输入输出模块系统配置1个台达DVP04AD-H2系列模拟输入模块,台达DVP系列模拟输入模块可将外部电流、电压信号转换成14位数字信号,响应时间12 ms,具有自诊断功能。
1.3开关量输入/输出扩展模块依据DVP-80EH00R2系列PLC及棉花打包机控制系统对开关量输入、输出的要求,本系统选用2个16HM11N型开关量输入扩展模块,为16路、光电耦合、直流输入,反应时间约为20ms;1个08HNll1R开关量输出扩展模块,为8路、继电器输出,反应时间约为10 ms。
基于PLC的打包机控制系统设计

其 中 自动 程 序 和 回到 原 点 程 序 中 采 用 了步 进 编 程 方 法 ,对 于手动 的程 序要采 用 简单的经 验设计 。
1 控制 系统的功 能分析
本 文 提 到 的 可 编程 逻 辑 器 件 采 用 的是 三 菱 公 司的 FX2N 系列 。在 三菱 公 司的 产 品中 ,FX2N 是 功 能 最 强和 速 度 最 快 的 一种 。其 执 行 指 令 的 速 度 很 快 ,而 且 存 储 空 间可 以扩 展 ,多 达 256个 输 入 输 出 口,支 持 多种 通讯 模块 。
本 文 的重 点 是 研 究如 何 利 用 PLC来 实现 打 包 机控 制 系统 设计 ,采 用的 是 日本 三菱 公 司 的 PLC, 三 菱公 司 的 PLC在 各 个领 域 都 有 很好 的应 用 ,使 用起 来方 便 ,便 于维 护 。打 包机 的本质还 是机 床设 备 ,会 牵涉 到 很 多 的动 作 ,我们 采 用 的程 序 设 计 方 法 是 顺 序 程 序控 制 设 计 法 也 称 为 步 进控 制 设 计 法 ,具体 采用 的是 步进梯 形指令 进行编 程 。这 是 目 前 比较 流 行 的 简 单 易懂 的 编程 方法 ,能 使得 维 护 人 员很轻 松地进 行维 护 。在 具体程 序设计 中 ,用到 了三菱 公 司 FX 系列特 有 的状 态 初 始化 的 指令 IST 来 简化程 序 的结构设 计 。其 中程 序具体 包括 打包机 的 自动执 行 程序 、回到 原 点程 序 和手 动控 制 程序 ,
0 引言
打 包机 在 很 多 旧机 床 上 大 都 是 采 用继 电器 控 制 的 ,这 些 机 床 采 用 种 类 很 多 的 继 电器 来 控 制 , 组 成 的 系统 布 线 很 复 杂 ,维 修 起 来 很 是 麻 烦 。而 且 传统 的继 电器 系统 只能对 某 个打 包 机进 行控 制 , 一 旦 要 换 打 包 机 时 ,也 需要 更换 继 电器 系统 ,以 免 使用 周期 较短 。
打包机原理结构和故障分析

失效
将电热片拉至定位点,导致粘合一半,甚至更少。
加热头位置不当
打包机加热头过高、低或偏左、偏右,因此碰到上、下方的打包带或 是左、右的顶体,而无法加温,必顺根据情况进行适当的调整。
打包机凸轮三切刀刀 中顶刀体下方的轴承破裂,这样一来则只有加温, 打包机中顶刀体
体轴承破裂 无法上升粘合。
打包机内温度高 打包机风扇发生故障,例打包机内温度过高。
打包机其它故障原因 捆紧旋钮太松、线路板坏、出带控制电位器坏。
插带不动
故障原因 维修及故障排除方法
LS1
微动开关故障
LS1 微动开关故障或弹片被异物卡住,更换开关或清理异 物。
离合器工作不正常 离合器损坏或间隙太大,更换离合器或调节间隙。
打包机线路板故障 线路板、小变压器、磁控损坏。
连续动作
故障原因 维修及故障排除方法
五个凸轮的作用分别如下所示:
4
(正面)
从加电热机片侧的,往第送三带个侧凸开轮始是计切数带,第凸一轮个,第凸四轮个在凸动轮作也时是是固用定来包固装定带打的包,带第的五,第个二凸个轮凸第轮一是级控是制隔 离包装带的,它可以在加热的时候离开隔离位置,使加热片给打包带的粘结面加热,第二级 可以使经过粘结的包装带离开打包机,就是在打包机完成打包的时候脱开限位。 在远离电机侧还有两个凸轮,如下图所示:
4.打包机各开关的作用及原理
打包机控制面板上有 4 各开关,分别是电源,长度控制,手动和送带。 电源显而易见就是开关。长度控制,实际上在打包机控制的过程中是一个时间控制的过 程,他通过调整面板电位器调整一下电磁开关的吸合时间,达到调整送带长度的目的。
手动控制就是手动触发一个行程的打包过程,这个开关和打包微动开关的作用是一样的, 都可以出发一个打包过程。(微动开关 LS 1 的位置如下)
A002C型自动抓棉机控制系统改造与设计

A002C型自动抓棉机控制系统改造与设计一、实训目的1、了解A002C型自动抓棉机电气控制电路的基本原理和电气控制电路的控制过程。
2、掌握用PLC改造的程序编写和接线方法.3、掌握触摸屏的使用方法二、实训内容1、理解A002C型自动抓棉机控制电路的主回路原理2、理解A002C型自动抓棉机控制电路控制回路参考原理图3、用PLC改造A002C 型自动抓棉机,进行I/O 分配,画接线图、梯形图编写,并制作自动抓棉机触摸屏界面。
三、纺织厂纺纱基本常识1、纺纱就是将棉花转变为纱线的过程,是纺织厂的第一道工序,其工艺流程为:普梳纱工艺流程:开清棉梳棉并条粗纱细纱。
精梳纱工艺流程:开清棉梳棉精梳并条粗纱细纱。
所用的设备包括: (包括抓棉机、混棉机、开棉机、清棉机、成卷机等)、梳棉机、精1梳机、并条机、粗纱机、细纱机以及后加工的络筒机、捻线机等。
2、开清棉机的基本任务就是:(1)开松:把棉包中压紧的棉块松解成小棉束;(2)除杂:清除原料中的杂质和疵点以及原料中的部分短绒;(3)混合:使不同的原料充分混合;(4)成卷:均匀喂给,制成一定重量和长度的棉卷以满足下道工序的需要。
抓棉机是该工序的第一种设备,主要任务是:从棉包抓取块棉,开松、除杂、喂给后面的机械。
32、纺纱设备绝大多数是由三相笼型异步电机拖动。
起动方法有:全压直接起动、降压起动、变速起动等方法。
保护方式主要有:短路保护、过载保护、欠压和失压保护等。
质量控制方面主要有:光电控制、限位控制、速度控制、自调匀整以及防粗细节等控制环节。
四、A002C 型自动抓棉机基本资料抓棉机按外形分为圆盘式和自动往复式两种,A002C 型自动抓棉是圆盘式的。
图1 往复式自动抓棉机图2 圆盘式自动抓棉机1、A002C 自动抓棉机工作原理A002C 自动抓棉机结构和控制电路如图3、4所示:图3 A002C自动抓棉机结构图4 A002C型自动抓棉机控制电路图5 A002C型自动抓棉机控制电路简化图2、控制特点:(1)本机采用多电动机拖动:打手、小车和打手升降分别由1M、2M、3M 单独拖动。
MDY-400型液压棉花打包机系统说明书

MDY-400型液压棉花打包机系统说明书一、概述液压棉花打包机是一种电液一体化的设备,可广泛用于压缩棉花、化纤、麻类、草类、羽绒、药材等松散物质,方便仓储和运输,节省包装物耗和运输费用。
MDY-400型液压棉花打包机是我厂与国际接轨,使用我国的棉机成套设备走向国际市场而满足配套要求研制的产品,具有结构新颖,技术含量先进,刚性和稳定性好,自动化程度较高,照型美观等特点,安全可靠,操作简易,维护方便,设备基础工程费用低等特点,是一款达到国际先进水平的新产品。
二、技术规格及主要参数MDY-400型液压棉花打包机的主要参数包括公称力为4000kn,包型尺寸为400X530X700mm,保重为227kg±10kg,压缩高度为485---500mm,台时产量为4500kg/h,装机容量为82.4kw(包括辅机),整机质量约为55t。
三、调整与使用一)空载调整在空载状态下,需要点动各风机,并检查电机旋转方向是否与油泵方向一致。
同时,需要检查各电磁阀控制的各油缸的运动是否正确无误,以及各接近开关控制的信号是否正确无误。
接着,起动各油泵电机,并分别将各压力阀调定在规定的范围内,最后调定各压力继电器设定的压力值。
二)各运动部件的调整提箱高度一般为5—8毫米,即棉箱转盘底平面与底座的距离,只需调整提箱油缸顶端扁担铁上的M24螺栓端面与提箱油缸柱塞端面的间隙为5—8mm以上即可。
勾棉器高度也需要进行调整,具体操作方法请参考使用说明书。
四、维护与保养MDY-400型液压棉花打包机需要定期进行维护和保养,包括清洗、润滑、检查电气系统和液压系统等。
同时,需要定期更换易损件,以延长设备的使用寿命。
五、附件图使用说明书中提供了附件图,可供用户参考。
六、编辑后语本篇文章由XXX工程师XXX整理,如有任何问题或建议,欢迎联系Scly988@。
勾棉器在预压工作位置时,棉爪板应伸入箱内,与棉箱内壁平面的距离应为65mm。
在预压成包工作位置时,必须让勾棉器张开,棉爪板的齿端不得接触箱板。
A002C型自动抓棉机控制系统改造与设计plc报告1

纺织机设备电气控制报告班级:现纺111姓名:岑冬双学号:201102052025A002C型自动抓棉机控制系统改造与设计一、实验目的1、了解A002C型自动抓棉机电气控制电路的基本原理和电气控制电路的控制过程。
2、掌握用PLC改造的程序编写和接线方法.3、掌握触摸屏的使用方法二、实验内容1、理解A002C型自动抓棉机控制电路的主回路原理2、理解A002C型自动抓棉机控制电路控制回路参考原理图3、用PLC改造A002C型自动抓棉机,进行I/O分配,画接线图、梯形图编写,并制作自动抓棉机触摸屏界面。
三、纺织厂纺纱基本常识1、纺纱就是将棉花转变为纱线的过程,是纺织厂的第一道工序,其工艺流程为:普梳纱工艺流程:开清棉梳棉并条粗纱细纱。
精梳纱工艺流程:开清棉梳棉精梳并条粗纱细纱。
所用的设备包括: (包括抓棉机、混棉机、开棉机、清棉机、成卷机等)、梳棉机、精梳机、并条机、粗纱机、细纱机以及后加工的络筒机、捻线机等。
2、开清棉机的基本任务就是:(1)开松:把棉包中压紧的棉块松解成小棉束;(2)除杂:清除原料中的杂质和疵点以及原料中的部分短绒;(3)混合:使不同的原料充分混合;(4)成卷:均匀喂给,制成一定重量和长度的棉卷以满足下道工序的需要。
抓棉机是该工序的第一种设备,主要任务是:从棉包抓取块棉,开松、除杂、喂给后面的机械。
2、纺纱设备绝大多数是由三相笼型异步电机拖动。
起动方法有:全压直接起动、降压起动、变速起动等方法。
保护方式主要有:短路保护、过载保护、欠压和失压保护等。
质量控制方面主要有:光电控制、限位控制、速度控制、自调匀整以及防粗细节等控制环节。
四、A002C型自动抓棉机基本资料抓棉机按外形分为圆盘式和自动往复式两种,A002C型自动抓棉是圆盘式的。
A002C型抓棉机的控制系统为继电器——接触器控制,由于触点数多,线路复杂,电线老化,所以故障率高,操作人员维护和维修任务重,机械使用效率较低。
用西门子S7—200系列PLC改造该设备控制系统,改造后克服了以上缺点,降低了设备故障率,提高了设备使用率,且便于实现整厂的生产自动化,节约了成本,效果很好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小型棉花打包机机构及控制系统设计
棉花打包机是一种将棉花压缩并打包的机械设备,主要用于棉花加工厂、棉纺厂等场所。
小型棉花打包机机构及控制系统设计需要考虑以下几个方面:
1. 机械结构设计:小型棉花打包机的机械结构设计需要考虑打包机的压缩方式、打包尺寸、打包速度等因素。
常见的压缩方式有液压压缩和机械压缩两种,可以根据实际需求选择。
同时,还需要考虑打包机的进料和出料方式,以保证打包效率和打包质量。
2. 控制系统设计:小型棉花打包机的控制系统设计需要考虑控制方式、控制精度、安全保护等因素。
常见的控制方式有手动控制、半自动控制和全自动控制三种,可以根据实际需求选择。
同时,还需要考虑控制系统的稳定性和可靠性,以保证打包机的正常运行。
3. 动力系统设计:小型棉花打包机的动力系统设计需要考虑动力源的选择、传动方式、动力匹配等因素。
常见的动力源有电动机和内燃机两种,可以根据实际需求选择。
同时,还需要考虑传动方式的效率和可靠性,以保证打包机的正常运行。
4. 安全保护设计:小型棉花打包机的安全保护设计需要考虑人员安全和设备安全等因素。
常见的安全保护措施有防护罩、安全门、急停按钮等,可以根据实际需求选择。
同时,还需要考虑打包机的过载保护和漏电保护等措施,以保证设备的安全运行。
总之,小型棉花打包机机构及控制系统设计需要综合考虑机械结构、控制系统、动力系统和安全保护等方面的因素,以保证打包机的高效、稳定、安全运行。