FARO快速入门流程
FARO便携式三坐标测量仪操作规程

FARO便携式三坐标测量仪操作规程一、安装测量臂与探针:1、打开运输包装箱,双手提取测量臂FaroArm,注意不让测量臂各关节承受外力;2、安装将测量臂FaroArm通过螺纹固定于底座支架上,注意安装扭矩适中;3、利用绑带绑缚测量臂FaroArm,防止其自由下落而损伤关节;注意每测量步骤完成都要将测量臂FaroArm复位并绑缚;4、根据需要安装3mm球探针、6mm球探针或点探针,注意安装扭矩适中。
二、连接设备:1、通过数据线、电源线等将测量臂主机FaroArm、电源、电脑连接;可以将电池安装到测量臂主机充电器内充电;检查保证连接正确;2、打开电源,电源指示灯亮;打开电脑及测量软件界面;(测量软件需要“加密狗”);3、测量软件界面显示设备连接完好后,即可进行如下步骤。
三、探针校准:1、自定义探针:在测量软件界面中根据测量需要选择3mm球探针、6mm球探针或点探针;2、选择“单孔探针校准圆锥”或“球探针校准器”,将其固定;3、在测量软件界面选择“单孔校准”或“球校准”导航校准;4、进行探针校准。
四、测量:除了常规测量之外,对超出测量臂测量范围的大型工件,还可以用三个“蛙跳球”进行位置移动转换测量。
测量过程注意事项:1、必须做探针校准;2、注意测量软件界面中对测量臂FaroArm关节转动极限位置的报警提示;3、每测量步骤完成测量臂FaroArm的复位及绑缚,有效保护关节;4、使用配备电源,并杜绝工作状态将FaroArm断电;但数据线可以即时插拔;5、被测量工件必须与测量臂FaroArm相对位置保持固定,可采用热溶胶固定或夹持工件等方法。
五、测量结果分析,报表:1、及时保存测量结果输出数据;2、可打印测量结果输出数据报表;3、可将测量结果与数据模型进行比对,输出数模比对数据报表。
六、拆卸:1、必须首先拆卸探针并放置到探针盒中正确位置;2、注意保护测量臂FaroArm;。
法如3d激光扫描仪技术手册2
可用替换零件
• 带电源线的供电单元 • AC 电源线
• 装运箱
LED 行为
“
启动 / 停止 ”
按钮下方的 LED
扫描仪光学镜 一侧的 LED
扫描仪传感器 一侧的 LED
扫描仪底座上 的 LED
扫描仪关闭,外部 电源未连接
关闭
关闭
关闭
关闭
扫描仪关闭,外部 电源已连接
关闭
蓝色持续亮起 蓝色持续亮起 蓝色持续亮起
扫描仪传感器 一侧的 LED
扫描仪底座上 的 LED
扫描操作激光打开 红色闪烁 红色闪烁 红色闪烁 红色闪烁
扫描操作激光关闭 蓝色闪烁 蓝色闪烁 蓝色闪烁 蓝色闪烁
错误
橙色持续亮起 橙色持续亮起 橙色持续亮起 橙色持续亮起
关机
蓝色快速闪烁 蓝色快速闪烁 蓝色快速闪烁 蓝色快速闪烁
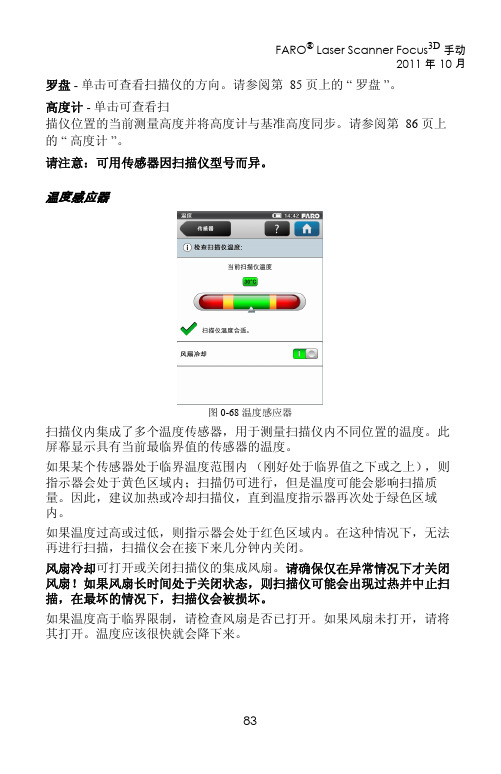
图 0-77 LED 行为
SD 存储卡的文件结构
Focus3D SD 卡的文件结构如下所示:
图 0-78 SD 卡文件结构
Backup (备份)- 扫描仪备份会保存到此文件夹中。在启动扫描仪备份 后,会立即自动创建备份文件夹。请参阅第 78 页上的 “ 备份 ”。 Log file (日志文件)- 从扫描仪导出日志文件时,该文件会保存到此文件 夹中。此文件夹将由扫描仪自动创建。请参阅第 77 页上的 “ 日志文件 ”。 Preview (预览)- 捕获的扫描的预览图片会保存到此文件夹中。在启动扫 描后,会立即自动创建此文件夹。请参阅第 48 页上的 “ 开始扫描 ”。 Projects (项目)- 扫描项目信息会保存到此文件夹中。此文件夹将由扫描 仪自动创建。请参阅第 59 页上的 “ 管理扫描项目 ”。 Scans (扫描)- 捕获的扫描会保存到此文件夹中。在启动扫描后,会立即 自动创建扫描文件夹。请参阅第 48 页上的 “ 开始扫描 ”。 Updates (更新)- 固件更新会复制到此文件夹中。此文件夹必须手动创 建。请参阅第 81 页上的 “ 固件更新 ”。
FARO操作手册

FARO EDGE产品介绍•结构1.臂管12.臂管23.探针4.按钮5.手柄6.7轴手柄(可拆卸)7.锁定按钮8.状态面板9.可折叠式触摸屏控制器B驱动器端口11.SD RAM卡端口12.底座卡环FARO EDGE 产品介绍•结构13.减震器14.开/关开关15.电源端口B端口17.以太网端口18.手柄存放磁铁FARO EDGE 安装操作•底座安装通过手柄拧紧底座卡环FARO EDGE 安装操作•探针安装1.握住EDGE的末端的按钮区域2.顺时针旋转探针,将其旋入注意:安装探针时,切勿在按钮区外的地方握住EDGE。
FARO EDGE 安装操作•探针的放置手柄放置时,确保磁扣对齐、吸住。
FARO EDGE 安装操作•FARO EDGE的7轴1.逆时针旋转松开锁定环2.将7轴手柄的前端插入槽里3.向里推7轴手柄,接好接头4.顺时针旋转拧紧锁定环注意:收起设备时,先卸下7轴手柄FARO EDGE 安装操作•FARO EDGE的电源1.电源开关2.电源端口FARO EDGE 安装操作•触摸屏控制器按下底座顶部的锁定装置可以打开触摸屏控制器。
FARO EDGE 安装操作•电池安装1.将圆的一面朝下滑入电池组。
2.向内推动电池,直至其卡入到位。
FARO EDGE 安装操作•电池拆卸1.向右推动电池组释放杆2.将电池组拉出FARO EDGE 安装操作•电池充电1.Edge 接通电源后,电池组便开始充电。
即使电源为关闭位置,电池组也将充电。
电池组充电完毕后将自动停止。
2.电池组内置有电量表。
按下连接器边上的软按钮,观察 LED 即可了解当前电量。
FARO EDGE操作规程•正确操作1.安装FaroEdge时,注意使用正确的手法进行提拎。
2.如果仪器安装在三脚架上,请确保三脚架上的所有螺纹连接已经拧紧;如果安装在磁力吸盘上,检查并除去磁力座的底部油污或铁屑等杂物;如果安装在真空吸盘上,一定要按说明书正确使用,以免漏气发生一些意外。
FIFA系列新手入门指南

FIFA系列新手入门指南FIFA是全球最受欢迎的足球电子游戏系列之一,吸引了数百万玩家。
对于新手来说,了解游戏的基本操作和策略是非常重要的。
本文将为FIFA系列的新手玩家提供一个完整的入门指南,帮助他们掌握游戏的基本知识和技巧,提高游戏水平。
一、了解游戏模式FIFA系列游戏有多种不同的游戏模式,包括单人模式、多人对战模式和在线联赛等。
新手玩家可以通过单人模式来熟悉游戏的基本操作和规则,逐步提高自己的技巧。
多人对战模式则可以和朋友一起享受比赛的乐趣,切磋技艺。
二、掌握基本操作在开始游戏之前,新手玩家需要了解游戏的基本操作。
游戏中的控制器布局可以根据个人喜好进行调整,但通常包括传球、射门、带球、防守和换人等操作。
熟练掌握这些操作对于在比赛中取得胜利至关重要。
三、了解战术和策略FIFA系列游戏注重团队合作和策略性的操作。
新手玩家可以通过学习不同的战术和策略来提高自己的游戏水平。
例如,选择适合自己风格的阵型、合理安排球员位置、掌握快速反击和配合等战术都可以帮助玩家在比赛中取得优势。
四、关注球队和球员数据FIFA系列游戏还提供了真实的球队和球员数据,包括球员的能力、速度、射门等属性。
新手玩家可以通过对球队和球员的了解,选择适合自己风格的球队和球员,提高游戏的胜率。
此外,关注球队和球员的最新动态也能够帮助玩家更好地了解球队的实力和策略。
五、参加训练模式对于新手玩家来说,参加训练模式是非常重要的。
通过参加各种训练活动,新手玩家可以熟悉游戏的各项操作和技巧,并逐步提高自己的技术水平。
在训练模式中,玩家可以尝试各种传球、射门、带球和防守动作,加深对游戏机制的理解。
六、与其他玩家互动FIFA系列游戏支持在线对战和联赛模式,新手玩家可以与其他玩家互动,切磋技艺。
通过与其他玩家对战,新手玩家可以学习到不同的战术和策略,提高自己的游戏水平。
此外,与其他玩家互动还能够增加游戏的乐趣和刺激感。
总结:通过本篇指南,新手玩家可以了解FIFA系列游戏的基本操作和策略,提高自己的游戏水平。
FARO测量臂使用方法及其基本运用

FARO测量臂的使用方法及基本运用一、任务概述测量臂是模具行业使用频率很高的仪器。
通过这次的课题,锻炼自己的学习能力,促进对于先进测量仪器的认识和运用。
建立三坐标测量的基本原理和意识,并使之融入到产品设计周期的各方面。
学会编制基本的操作规程文件,提高对于实践经验的归纳总结能力。
二、课题目标FARO铂金测量臂是公司新购置的设备。
通过此次学习和实践,掌握测量臂的基本原理和使用方法,并通过示范和讲解使公司其他设计人员和生产人员懂得此设备的基本操作。
测量臂是先进的多功能测量仪器。
针对本公司的设计、生产需要,分析归纳现有问题,参考同行业技术标准和产品使用说明,依托FARO售后培训和技术支持,最终生成本公司自己的技术说明手册。
配合现有模具项目检测任务,确定测量方案。
认识和总结在实际操作中需要注意的问题和事项,为今后的使用积累经验。
特别注意收集整理测量流程当中相关的各方面问题及其解决方案。
三、主要内容多方搜集资料。
目前对于测量臂的了解甚少,需要尽可能多的收集测量臂的有关资料,这里也并不限于FARO品牌。
认真准备培训。
如果验货顺利,预计一周内FARO的培训技术人员可以到位,需要提前联络沟通,做好培训准备工作。
积极摸索实践。
FARO培训结束后的一段时期内,根据所学知识,开展一些实践。
主要针对当前项目需要,并可以适当探索。
总结经验教训。
归纳总结在实际使用中遇到的问题,关注问题的根源和避免、解决途径。
也是为编制操作规程文件提供素材。
开展小组活动。
准备一到两次专题小组活动,介绍课题成果并与大家交流。
如果有必要,可以展开深入讨论。
编制程序文件。
汇总各方面信息,结合自身实际体验,制定操作规程。
为FARO测量臂的规范和普及使用创造条件。
四、解决方案解决问题是购置设备的终极目标。
FARO测量臂可以广泛应用于多个领域且各有特点。
要分析我们自己、客户和供应商的不同需求,找到解决相关问题的方案。
零部件检测是此次课题关注的重点。
PART-TO-CAD是现有的检测模式,其中需要关注的问题包括数据模型的处理,测量方案的确定,具体测量操作技巧,测量数据的处理几大方面。
法如3D扫描仪入门教程ppt课件
按选择配置文件按钮,更改 和选择一个预义的扫描配置文件。 您会获得所有可用配置文件的列 表。 如果需要,您可以返回参数 屏幕直接更改扫描参数;否则可 转到主屏幕开始扫描
• 分辨率和质量:所选分辨率(以百万 点为单位)和所选质量等级。 单击可 调整这些值。 • 扫描范围: 扫描区域,包含其水平和 垂直起始角度和终止角度。 按此按钮 可调整扫描区域。 • 彩色扫描: 打开或关闭捕获彩色扫描。 • 高级设置: 更改硬件过滤器设置。 • 眼睛安全距离 [m]:径向和轴向眼睛 安全距离。 遵守这些距离可防止眼睛 受到伤害。
9. 关闭扫描仪电源 在扫描仪完全关闭后,取 出电池,并将设备妥善存放到 保护盒中。
法如3D扫描仪 入门教程
1. 扫描仪装运保护箱。 2. AC 电源线 3. 带电源线的外部电源 存储卡 盒 6. USB 读卡器 7. 激光护目镜 8. 快速入门指南 9. 包含 SCENE 软件和 用户手册的 CD 10.快卸装置
操作 FARO Laser Scanner Focus 3D时,必须保持眼睛安全距 离。在眼睛安全距离以内操作的工作 人员必须佩戴激光护目镜。 未佩戴 激光护目镜的人员禁止进入此区域如 使用不当,可能会伤害眼 睛。
4.为扫描仪供电 激光扫描仪可以使用电池或 电源单元进行操作
打开激光扫描仪的电池舱。 翻转电池,使其类型标签朝上,使 电池触点指向扫描仪,直线推入 电池,并将其向内滑入到电池舱 底部,直至固定件“咔嚓”到位。 关上电池舱盖。
5. 接通扫描仪电源 按“开/关”按钮开始 启动过程,此时扫描仪 LED 呈蓝色闪烁。当扫描 仪准备就绪时,LED 会停 止闪烁并开始呈蓝色亮起; 操作软件的主屏幕会出现 在集成触摸屏上。
3.将 SD 存储卡插入扫描仪 1)打开 SD 存储卡插槽护盖。 2)插入 SD 卡,让带缺口的边缘朝 所示方向,直至发出“咔哒”声。 SD卡的侧边可能有保护锁开关。 请确保此保护锁开关处于打开状 态,以使SD卡可写入。 3)确认存储卡的方向。 如果您按错 误的方向强行插入存储卡,可能 会损坏 SD 卡、卡插槽或卡中的 数据。 4)关上护盖。
FARO快速入门流程

SCENE软件处理数据流程1打开软件
2.新建一个项目
3.新建项目后选择工作路径
4.将需要处理的数据拖拽到新建项目下
5.右键加载数据
6.加载完成后右键选择三维视图
7.打开三维视图后选择左上角的地球标志移动
8.选择多边形选择器,选择要保留的数据进行删除
9.数据删除过程
10.以此类推其他数据一样处理,如上图所示还可以选择删除需要删除的部分进行删除,根据个人需要进行处理。
FARO三维激光扫描仪scene自动拼接流程1.打开软件
2.新建一个项目
3.新建项目后保存工作路径
4.选择需要拼接数据拖拽到新建项目下
5.加载点云数据,在Scans下加载所有扫描。
6.加载所有扫描点完成后还在Scans下操作,正在预处理,预处理扫描。
7.预处理扫描后,需要保存扫描数据路径。
8.预处理选择框。
用标靶球拼接只需要选择一下几个选项,在
9.自动查找球体的过程。
10.数据拼接完成效果。
FAROARM三坐标测量机基本操作过程

FARO ARM三坐标测量机基本操作过程一.重型三角架1.1三角架底座的移动1.1.1升起三角架底座1.1.1.1脚踩在脚踏板上,将其向下并朝向三角架中心压动,同时握住三角架稳定杆,向上提起,使三角架底座升起,确定只有滚动轮接触地面,以便将三角架移动到需要的位置。
1.1.1.2将脚从脚踏板上移走,脚踏板将锁定在适当位置。
1.1.2 降下三角架底座:脚踩在脚踏板上,将其向下并向三角架中心向外压动,使三角架的底座下降,滚动轮回缩,然后,弹起脚踏板。
1.1.3 固定三角架:手动调整三个调整螺钉,直到平稳,然后用扳手将三角架底座上的锁紧螺母锁定,防止三角架在不平坦的地面摇晃。
1.2调整三角架1.2.1升起三角架立柱1.2.1.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.1.2逆时针方向旋动升降手柄,调整三角架立柱到希望高度。
1.2.1.3锁紧锁紧手柄,推下顶舌,使立柱固定不动。
1.2.2降低三角架立柱1.2.2.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.2.2逆时针方向旋动四方手柄大约1英寸,将顶舌抬起。
1.2.2.3顺时针方向旋动四方手柄,使立柱降低。
1.2.2.4锁紧锁紧手柄,使立柱锁定在固定位置。
二.安装FARO ARM:正确的安装方法是保证测量精度的基础。
2.1将快速安装卡盘安装到三角架底座安装面板上,拧紧固定螺栓。
2.2将FARO ARM的下底座安装到快速安装盘上,并用扳手拧紧。
2.3选择所需用的测头安装到FARO ARM上,注意用力适度,以免损伤螺纹和影响测量精度。
2.4注意:三角架最好安装在水平面上,坡度较大时要防止ARM 坠落摔伤。
ARM暂时不用时要把第2和第6关节相对放置,并用臂固定贴固定好。
三.选择相应的校准器(球校准器或锥校准器),并固定在FARO ARM臂长的1/2-2/3范围处,以备FARO ARM校准之用。
四.连接计算机和FARO ARM4.1将端口锁(加密狗)插入到计算机的USB接口上,以授权CAM2正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SCENE软件处理数据流程1打开软件
2.新建一个项目
3.新建项目后选择工作路径
4.将需要处理的数据拖拽到新建项目下
5.右键加载数据
6.加载完成后右键选择三维视图
7.打开三维视图后选择左上角的地球标志移动
8.选择多边形选择器,选择要保留的数据进行删除
9.数据删除过程
10.以此类推其他数据一样处理,如上图所示还可以选择删除需要删除的部分进行删除,根据个人需要进行处理。
FARO三维激光扫描仪scene自动拼接流程1.打开软件
2.新建一个项目
3.新建项目后保存工作路径
4.选择需要拼接数据拖拽到新建项目下
5.加载点云数据,在Scans下加载所有扫描。
6.加载所有扫描点完成后还在Scans下操作,正在预处理,预处理扫描。
7.预处理扫描后,需要保存扫描数据路径。
8.预处理选择框。
用标靶球拼接只需要选择一下几个选项,在
9.自动查找球体的过程。
10.数据拼接完成效果。