3dmm姿态参数
F3A全套动作
——摘自2005年第五、六期航空模型F3A飞行课堂—------P3A-2动作段志勇F3A有多套动作,其中坐图形和难度有很大的区别。
但所有的动作基础是:滚转动作、圆动作、角动作、方动作、三角动作。
这些动作的各种结合,变出各种不同的图形。
最初级的一套组合动作就是P3A-2,这也是全国青少年锦标赛以及业余航模选手比赛常用的一套动作,包括:起飞、殷麦曼、内筋斗、倒飞直线、古巴8字、横滚、礼帽、双向横滚、眼镜蛇横滚,着陆10个动作。
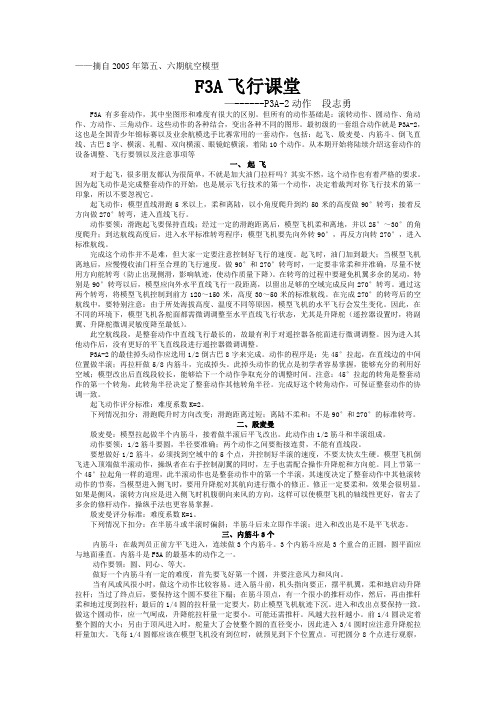
从本期开始将陆续介绍这套动作的设备调整、飞行要领以及注意事项等一、起飞对于起飞,很多朋友都认为很简单,不就是加大油门拉杆吗?其实不然,这个动作也有着严格的要求。
因为起飞动作是完成整套动作的开始,也是展示飞行技术的第一个动作,决定着裁判对你飞行技术的第一印象,所以不要忽视它。
起飞动作:模型直线滑跑5米以上,柔和离陆,以小角度爬升到约50米的高度做90°转弯;接着反方向做270°转弯,进入直线飞行。
动作要领:滑跑起飞要保持直线;经过一定的滑跑距离后,模型飞机柔和离地,并以25°~30°的角度爬升;到达航线高度后,进入水平标准转弯程序:模型飞机要先向外转90°,再反方向转270°,进入标准航线。
完成这个动作并不是难,但大家一定要注意控制好飞行的速度。
起飞时,油门加到最大;当模型飞机离地后,应慢慢收油门杆至合理的飞行速度。
做90°和270°转弯时,一定要非常柔和并准确,尽量不使用方向舵转弯(防止出现侧滑,影响轨迹,使动作质量下降)。
在转弯的过程中要避免机翼多余的晃动,特别是90°转弯以后,模型应向外水平直线飞行一段距离,以留出足够的空域完成反向270°转弯。
通过这两个转弯,将模型飞机控制到前方120~150米,高度30~50米的标准航线。
在完成270°的转弯后的空航线中,要特别注意:由于所处海拔高度、温度不同等原因,模型飞机的水平飞行会发生变化。
MODTRAN.参数输入说明

CARD 1: MODTRN, SPEED, MODEL, ITYPE, IEMSCT, IMULT, M1, M2, M3, M4, M5,M6, MDEF, IM, NOPRNT, TBOUND, SALBFORMAT (2A1, I3, 12I5, F8.3, F7.0)1. MODTRN = 'T', 'M' or blank 选择MODTRAN波段模式(光谱分辨率1cm-1)= 'C' or 'K'MODTRAN相关k选项(仅进行IEMSCT=1和2辐亮度模式计算;计算更精确但速度慢)= 'F' or 'L' 选择LOWTRAN波段模式(光谱分辨率20cm-1)2. SPEED = 'S' or blank‘slow’相关系数k选项,每个光谱间隔(1cm-1或15cm-1)使用33个吸收系数(k值)= 'M' 'medium'相关系数k选项(17个k值)3. MODEL = 0 仅指定一定海拔高度上的气象参数(常压,仅水平路径,查看CARDs 2C, 2C1, 2C2, 2C2X, and 2C3)=1 热带大气(北纬15度)=2 中纬度夏季大气(北纬45度,7月)=3 中纬度冬季大气(北纬45度,1月)=4 亚北极区夏季大气(北纬60度,7月)=5 亚北极区冬季大气(北纬60度,1月)=6 1976年美国标准大气=7 用户提供大气数据(查看CARDs 2C, 2C1, 2C2,2C2X, and 2C3)4. ITYPE大气路径类型ITYPE=1 水平路径(气压为常数)=2 两个海拔高度间的垂直或倾斜路径=3 从某一海拔高度到空间的垂直或倾斜路径5. IEMSCT程序运行模式IEMSCT=0 程序仅计算路径的透射率=1 计算路径的透射率和辐亮度=2 计算大气辐亮度和太阳/月亮散射辐亮度(如IMULT=0,仅包括太阳辐亮度单次散射)=3 计算太阳/月亮直射辐照度6. IMULT决定多次散射IMULT=0 不考虑多次散射=1 考虑多次散射,大气内部的应用通常推荐此设置=-1 考虑多次散射,主要应用于卫星传感器高度处的模拟(除非ITYPE=3或H2≥0,H2是路径末端的海拔高度)只有IEMSCT=1或2时,才可以选择多次散射。
APM固定翼调参

APM固定翼调参以下内容翻译自/plane/docs/roll-pitch-controller-tuning.html 内容作为本人外场飞行时所携带的飞行手册之用。
//-------------------------------分割线-------------------------------固定翼飞机和多旋翼相比,优劣互现。
由于固定翼与生俱来的无动力滑翔能力,它们在空中飞行时能一定程度容忍误操作和机械故障。
此外,固定翼能消耗相对较少的能量来实现大载荷的远距离飞行。
每一次飞行前:切换到FBWA 模式,手动倾斜飞机确认舵面反馈方向正确。
另外确认舵面动作和摇杆一致。
水平角度较准:关键参数是 AHRS_TRIM_X 和 AHRS_TRIM_Y ;每0.01 表示 0.6度,如果左倾斜,X调大,如果俯冲,Y调大解锁时的油门输出:ARMING_REQUIRE=1时,输出值为RC3_MIN;ARMING_REQUIRE=2时,停止向油门输出脉冲。
飞行模式:MANUAL:手动模式STABILIZE:松摇杆时自稳(更推荐FBW)FBWA:副翼摇杆控制转向,俯仰自动保持,最大横滚角度LIM_ROLL_CD,最大俯仰角LIM_PITCH_MAX/LIM_PITCH_MIN,高度依旧由油门(极限值THR_MINTHR_MAX)和升降舵控制(目前最流行的飞行模式)FBWB:相比A模式,增加定高功能,高度由升降摇杆控制,空速由油门摇杆控制。
最大爬升率由FBWB_CLIMB_RATE指定,默认为2m/s。
如果安装空速计,则油门摇杆控制的空速范围是ARSPD_FBW_MINto ARSPD_FBW_MAXCRUISE:巡航模式,相比FBWB,增加了锁向功能,适合远距离FPV飞行。
实际运作中,该模式将自动设定一个当前方向上一公里外的地点作为下一个Waypoint,因此具备抗侧风等外界干扰的功能。
方向舵摇杆能改变航向且保持机翼水平。
3ddfa 解读 -回复

3ddfa 解读-回复3ddfa(3D Dense Face Alignment)是一个面部关键点检测的模型,主要用于对面部进行三维重建和姿态估计。
它通过使用张量计算和深度学习技术,可以将平面图像中的面部特征点映射到三维空间中。
在传统的面部关键点检测方法中,通常使用二维关键点检测方法,如Dlib 或OpenCV等。
但是,这些方法只能提供二维平面上的关键点位置信息,并无法恢复出面部的三维结构和姿态。
而3ddfa则通过学习大量的面部数据,可以更加准确地获取面部的三维信息。
首先,3ddfa通过使用深度学习网络来学习面部特征和关键点的表示。
它使用了深度卷积神经网络(DCNN)来提取面部图片的特征信息,并使用全连接层来预测面部的关键点位置。
这些预测的关键点位置不仅包含了二维平面上的位置信息,还包含了面部的三维信息。
接下来,3ddfa使用一种称为Shape Regularization的技术,来约束和优化面部的形状和姿态。
具体来说,它通过最小化预测关键点位置和真实关键点位置之间的误差来进行优化。
另外,它还使用了形状正则化项,来限制面部形状的平滑性和一致性。
通过这些优化,3ddfa可以更加精确地估计出面部的三维结构和姿态。
最后,3ddfa还可以进行面部特征点的跟踪和跨域映射。
它使用了一种称为3DMM(3D Morphable Model)的模型,它通过学习大量的面部数据集,可以建立起一个面部形状和纹理的模型。
通过将3DMM与3ddfa 相结合,可以实现面部特征点的跟踪和跨域映射,即可以用一个已知的面部特征点分布来预测另一个面部的特征点位置。
总结来说,3ddfa是一个用于面部关键点检测的模型,它通过使用深度学习网络和形状正则化技术,可以准确地获取面部的三维结构和姿态。
它不仅可以进行面部三维重建和姿态估计,还可以进行面部特征点的跟踪和跨域映射。
在人脸识别、虚拟现实、增强现实等领域具有广泛的应用前景。
三丰千分表

543-691 543-695 543-692 543-696 543-693 543-682 543-683
543-691B 543-695B 543-692B 543-696B 543-693B 543-682B 543-683B
.5" .5" .5" .5" .5" .5" .5"
.00012" .00012" .00012" .00012" .00012" .0008" .0008"
• 电源开关 • 数据输出 • 数据保持
三大按钮
F
(当连接外部设备时) (当没有连接外部设 备时)
11mm
• 参数设置方式
测量方向转换,公差调整设置,分辨 率转换,刻度因子设置和函数锁设置
• ABS (预置) 和 INC
(调零) 测量方式 之间的转换
实际尺寸
• 公制 / 英制转换功能
F-4
显示表盘可以旋转 330°,可以从所需角度轻松读取测量 结果。
和电池耗尽后,都无需重新设置。
• 采用小型化,以及耐用型电池设计是一
种理想的测量装置。
技术参数
精度 : 参见性能参数 (不包括量化偏差) 分辨率 : 0.01mm 或 .0005"/0.01mm, 显示 : 液晶显示字符高度 8mm 长度基准 : ABSOLUTE 静电线性编码器 最大反应速度 : 无限制 参见性能参数 测力 : 轴套直径 : 8mm (ISO/JIS 型) 或 3/8"(ANSI/AGD型) 测针 : 带有 M2.5x0.45 螺纹的硬质合金球 (ISO/JIS型) 或带有 #4-48UNF 螺纹的硬质合金球 (ANSI/AGD型) 电池 : SR44 (一个), 938882 电池寿命 : 正常使用情况下约为 20,000 小时 尘/水防护等级 : 达到 IP42 防护标准
自动检测技术及其应用梁森后标准答案12

判定数字仪表位数的两条原则
1、能显示0~9所有数字的“位”是 “整位”;
2、分数位的判定:在最大显示值中, 以最高位所能显示的数值作为分子,用 满量程的最高位作为分母。
例如:当某一数字表最大显示值为 ±1999(不考虑小数点),满量程计数 值为±2000时,则它共有3个整位。最高 位只能显示1,满量程最高位为2,所以 它是3½位表。
1、由于植物生长是缓慢的,因此采用能测量微位移的差动变压器式位移 传感器是较合适的。
2、观察向日葵的生长姿态,再考虑质量块(衔铁)、导向轮、细绳及与差 动变压器的相对位置及传动过程是该装置的关键。
3、由于向日葵的生长是单方向的,因此测量转换电路的信号输出可以采 用直流电压表指示。
4、指针式毫伏表可将向日葵的生长量转换成指针的摆动幅度,仪表刻度 可预先用卡尺标定。
10题:下图是射击弹着点示意图,请你分别说出图 a、b、c各是什么原因造成的,应如何克服?
偏差特别大
弹着点接近 正态分布
弹着点均偏 向右上侧
第2页/共33页
关于数字表显示位及位数的概念介绍
数字多用表(Digital Multimeter,简称DMM)的显 示位数目前一般为3位~8½位(即8½位,以下同)。具 体地说,有3位、3½位、32/3位、33/4位、4½位、43/4位、 5½位、6½位、7½位、8½位等。最近国外还推出83/4位、 10½位等规格,使数字测量向更高精确度冲刺。数字表 位数的提高涉及稳定性、抗干扰等诸多技术问题,A/D 转换器只是其中的一个环节,能否真正达到额定的精确 度,还必须掌握正确的使用方法。
第25页/共33页
各种振动波形演示
第26页/共33页
7题:防身器材
构思一个多功能警棍,希望能够实现:①产生强烈眩光;②产生30kV(3万伏) 左右的高压;③能在50mm距离内探测出犯罪嫌疑人是否携带枪支或刀具。请画出该警 棍的外形图……
m3e飞行参数
温馨小提示:本文主要介绍的是关于m3e飞行参数的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇m3e飞行参数能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
m3e飞行参数(大纲)一、M3E无人机概述1.1M3E无人机简介1.2M3E无人机的主要应用领域二、M3E飞行参数详解2.1飞行器参数2.1.1翼展2.1.2机长2.1.3最大起飞重量2.1.4最大载重2.1.5最大飞行速度2.1.6最大飞行高度2.1.7续航时间2.2动力系统参数2.2.1发动机类型2.2.2电池参数2.2.3驱动电机2.3导航与控制系统参数2.3.1飞行控制系统2.3.2导航系统2.3.3遥控器与地面站2.4传感器与载荷参数2.4.1摄像头2.4.2红外传感器2.4.3多光谱相机2.4.4激光雷达2.4.5其他传感器三、M3E飞行参数优化与调整3.1飞行参数调整方法3.1.1参数调整原则3.1.2参数调整步骤3.2常见飞行参数优化方法3.2.1速度优化3.2.2高度优化3.2.3续航优化3.2.4稳定性能优化四、M3E飞行参数在应用中的注意事项4.1飞行前检查4.1.1飞行器状态检查4.1.2飞行参数确认4.2飞行中监控4.2.1飞行参数实时监控4.2.2异常情况处理4.3飞行后数据分析4.3.1飞行数据记录4.3.2飞行参数分析五、M3E飞行参数在行业应用案例5.1农业植保5.1.1飞行参数设置5.1.2作业效果分析5.2环境监测5.2.1飞行参数设置5.2.2监测成果展示5.3搜索与救援5.3.1飞行参数设置5.3.2救援案例分析一、M3E无人机概述1.1 M3E无人机简介M3E无人机是一款由我国某知名无人机制造商研发的微型无人机。
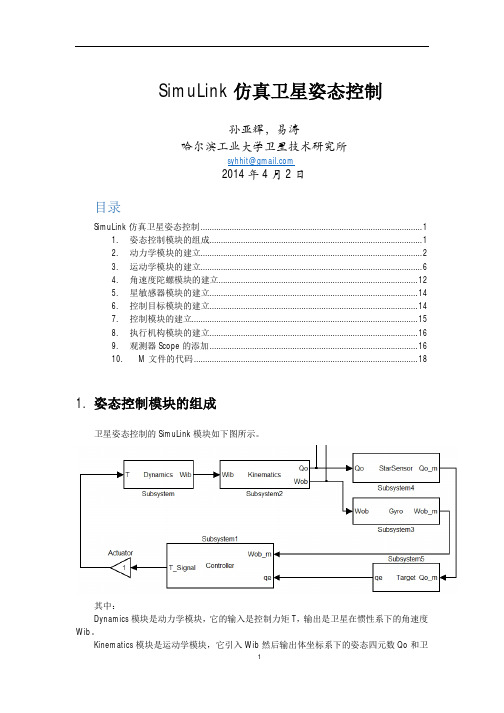
SimuLink仿真卫星姿态控制
将 H 与 w 引入 CrossProduct 模块(叉乘模块) 。 右键 Subsystem 模块-“Create Mask”来修改模块的外貌。 (为模块起名 Cross Product, 为输入输出起名,以防止叉乘顺序出错)
3
建立叉乘模块: 在模块里面添加两个 in,一个 out。添加两个 Mux,三个 Fuc,模型如下。Mux 的 Input 设置为[3 3]和[1 1 1]。
建立四元数求解模块: 使用 Subsystem 模块建立 Quaternion Solve Model,并 create mask 如下:
8
四元数主部与矢部分开计算积分如下:
根据上式画模块图如下:
9
利用 Integrator、Mux、Gain、Add 模块建立初始模块如下,其中两个 Integrator 的初值 即为初始姿态四元数的初值的主部和矢部。
孙亚辉,易涛 哈尔滨工业大学卫星技术研究所
syhhit@
2014 年 4 月 2 日
目录
SimuLink 仿真卫星姿态控制 ................................................................................................... 1 1. 姿态控制模块的组成............................................................................................... 1 2. 动力学模块的建立................................................................................................... 2 3. 运动学模块的建立................................................................................................... 6 4. 角速度陀螺模块的建立......................................................................................... 12 5. 星敏感器模块的建立............................................................................................. 14 6. 控制目标模块的建立............................................................................................. 14 7. 控制模块的建立..................................................................................................... 15 8. 执行机构模块的建立............................................................................................. 16 9. 观测器 Scope 的添加 ............................................................................................. 16 10. M 文件的代码 .................................................................................................... 18
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3dmm姿态参数
3DMM(三维形变模型)是一种基于统计学的方法,可以对人脸进行建模和形变,是目前人脸识别、3D重建和表情识别等领域中广泛使用的技术之一。
其中,3DMM姿态参数是指控制模型在三维空间中姿态变换的参数。
下面简要介绍一下3DMM姿态参数。
1. 平移参数
平移参数是3DMM中最常见的姿态参数之一,它控制模型在世界坐标系中的位置。
在应用中,通过对平移参数的调整来实现模型的位置调整,从而使模型更准确地对应到人体的实际位置上。
2. 旋转参数
旋转参数是控制模型在世界坐标系中旋转的参数,通常使用欧拉角表示。
在应用中,通过旋转参数的调整来实现模型在三维空间中的旋转变换,从而实现对姿态的调整。
3. 尺度参数
尺度参数是控制模型在三维空间中大小的参数。
在应用中,通过对尺度参数的调整来实现对模型的缩放或放大,从而使得模型更好地适应不同尺寸的人脸。
4. 特征点位移参数
特征点位移参数是对模型中特征点进行姿态变换的参数。
在应用中,通过对特征点位移参数的调整来实现对模型特征点位置的微调,从而实现对人脸形状的细节调整。
5. 表情参数
表情参数是指控制模型在表情变化时的参数。
在应用中,通过对表情参数的调整来实现对人脸表情的变化。
通常,表情参数是通过对多个人脸表情进行PCA降维来得到的,从而实现尽可能利用少量参数来表示不同的表情变化。
通过使用3DMM姿态参数,可以对人脸进行高精度的建模和形变,从而实现人脸识别、3D重建和表情识别等领域的应用。
同时,通过对姿态参数的调整,可以实现对人脸姿态的灵活性调整,从而更好地适应不同的应用场景。