基于激光雷达汽车防撞预警系统的设计与实现
基于激光雷达的车载防撞系统的设计
基于激光雷达的车载防撞系统的设计中文摘要:近年来,我国道路交通安全的形势仍然非常严峻。
如果在交通事故发生之前向驾驶员发出警告,让驾驶员能够采取一定的避免措施,就能有效地减少交通事故的发生,从而保障人身财产安全。
论文中主要介绍了一种基于激光雷达的车载防撞系统,并给出了可能实现的设计方法,描述了该防撞系统能够实现的功能,以及提出了有效避免车辆相撞的方案。
论文包括对硬件选型的描述,硬件电路的设计,以及软件框图的实现方法。
距离传感器采用的是激光传感器,单片机采用的是fresscale的MC9S12C32型号。
本文设计的系统采取两种措施,一种是蜂鸣器报警,另一种是在极端紧急的情况下,通过CAN总线对ABS发出制动信号,进行紧急刹车。
激光传感器向汽车前方不断发射激光束,在收到反射回波后计算出于本车的距离,方向角,以及与本车之间的相对速度。
单片机通过一个通信模块不断的向激光传感器采集数据,再经过软件程序计算,判断汽车是否处于安全状态,如果处于安全状态,单片机继续采集数据,如果处于危险状态,单片机发出控制信号,驱动声音报警电路进行报警,如果处于紧急情况,单片机通过汽车CAN总线向制动装置ABS发出控制信号,采取自动刹车。
关键词:防撞预警,激光雷达测距,单片机,CAN总线第一章引言随着社会的进步,国民经济得到迅速的发展,人民生活生活水平的不断提高,公路交通作为国民经济的重要枢纽近年来受到极大重视,国家和各级政府都对公里建设投入了大量的资金、人力和物力。
“九五”期间,我国的高速公路建设达到了11万公里,行驶的车辆速度再80km/h以上,一旦发生碰撞,后果不堪设想,故要求驾驶员注意力高度集中,时刻注意路况信息,增加了驾驶员的劳动强度。
另外,公路建设的同时,也带动了民族汽车工业的快速发展,20世纪末,我国的汽车产量比1993年翻一番,2010年,汽车产量又翻了一番,汽车数量逐年增长,越来越多的人拥有私人汽车,近年来,借助于电子控制技术的飞速发展,汽车的操纵性能和运动性能得到很快的提高。
基于激光雷达的汽车防撞报警系统的设计
2 aR
l
4
激光的 传播速度c 求出 被测物的 距离, 即: 5 : : 。
工
) 南
S 。 , 其 中 S o 为 本 车 制 动 停 止
2 硬 件 电路 设 计
与障碍物之 间的距离 当前车或障碍物匀速或加速行驶 时 . 安全距离为 :
2
、
2
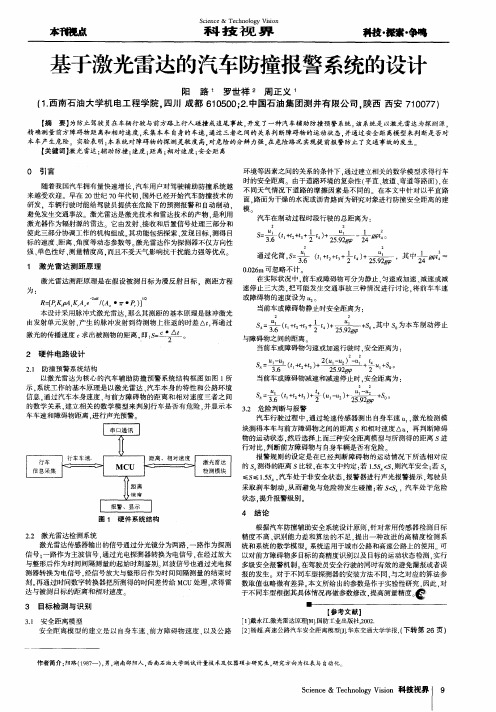
2 . 1 防撞预警系统结构 以激光雷达 为核心 的汽车辅 助防撞预警 系统结构框 图如图 1所 当前车或障碍物减速和减速停止 时 . 安全距离为 : 示. 系统工作 的基本 原理是以激光雷 达 、 汽车本身 的特性和公路 环境 信息 . 通过汽 车本身速度 、 与前方 障碍物的距离 和相对速度 三者 之间 的数学关 系 , 建 立相 关的数学模型来 判别行车是 否有危险 . 并显 示本 3 . 2 危险判断与报警 车车速和障碍物距离 。 进行声 光预警 汽车行驶过程 中, 通过 轮速传感 器测 出 自身车速 “ . . 激 光检测模
【 摘 要】 为防止驾驶员在车辆行驶与前方路上行人碰撞或追尾事故, 开发 了 一种汽车辅助防撞预警系统。 该系统是以激光雷达为探测源,
精 确测量前 方障碍 物距 离和相对速度 , 采集本车 自身的车速 , 通过 三者之 间的关 系 判 断障碍物 的运动状 态, 并通过安全距 离 模型 来判 断是 否对 本 车产生危 险。实验表 明: 本 系统对 障碍物的探测灵敏 度 高, 对危险的分辨 力强, 在危 险路 况实现提前报警防止 了交通事故的发 生。
【 关键词】 激光雷达; 辅助防撞; 速度; 距离; 相对速度; 安全距 离
0 引言
随着我 国汽车拥有量快速增长 . 汽车用户对 驾驶辅 助防撞系统越 来越受欢迎 。早在 2 O 世纪 7 O 年代初 . 国外 已经 开始汽车防撞技术的 研发 ,车辆行驶时能给驾驶员提供在危 险下的预测报警 和 自动制动 . 避免发生交通事故 。激光雷达是激光技术和雷达技术 的产 物 , 是利用 激光器作为辐射源 的雷达 它由发射 、 接 收和后 置信号处 理三部分和 使此三部分协调工作的机构组成 。 其功能包括探索 、 发现 目标 , 测得 目 标的速度 、 距离 、 角度等动态参 数等。 激光雷达作为探测器不仅方向性 强、 单色性好 、 测量精度 高 。 而且不受天气影 响抗 干扰能力强等优点。
基于激光雷达汽车防撞预警系统的设计与实现

基于激光雷达汽车防撞预警系统的设计与实现激光雷达技术在汽车行业中的应用已经成为一个热门话题。
随着自动驾驶技术的发展和普及,基于激光雷达的汽车防撞预警系统也越来越受到关注。
本文将详细介绍基于激光雷达的汽车防撞预警系统的设计与实现过程。
一、激光雷达汽车防撞预警系统的原理激光雷达汽车防撞预警系统的原理是利用激光雷达传感器对车辆周围的环境进行实时监测,当激光雷达传感器探测到可能发生碰撞的危险情况时,系统可以通过声音、震动、甚至自动刹车等方式发出预警信号,提醒驾驶员及时采取避免碰撞的措施。
1. 激光雷达传感器的选择在设计激光雷达汽车防撞预警系统时,首先需要选择合适的激光雷达传感器。
传感器的选择需要考虑传感器的探测距离、角度范围、分辨率和精确度等参数,以确保系统能够准确监测车辆周围的环境并及时发出预警信号。
2. 数据处理与算法设计传感器采集到的数据需要经过处理和算法设计才能转化为实用的信息。
这一步需要对传感器采集到的数据进行滤波、识别和跟踪处理,以获取准确的车辆周围环境信息,并实时判断可能发生碰撞的危险情况。
3. 预警系统设计预警系统是激光雷达汽车防撞预警系统的核心部分。
预警系统可以通过声音、震动或者直接控制车辆的刹车系统来发出预警信号,提醒驾驶员及时采取避免碰撞的措施。
1. 硬件部分的实现激光雷达汽车防撞预警系统的硬件部分包括激光雷达传感器、数据处理模块和预警系统。
首先需要将选定的激光雷达传感器安装在汽车上,并与数据处理模块连接。
数据处理模块可以使用嵌入式系统或者单片机等硬件来实现对传感器数据的处理和算法的运行。
预警系统则可以通过声音模块、震动模块和车辆刹车系统等硬件来实现对驾驶员的预警。
软件部分是激光雷达汽车防撞预警系统的关键,它包括对传感器数据的处理算法和预警系统的控制软件。
传感器数据的处理算法需要包括数据滤波、目标识别与跟踪等功能,以确保系统能够准确地识别车辆周围的环境。
预警系统的控制软件则需要对驾驶员的预警信号进行适时、准确的控制。
基于激光雷达汽车防撞预警系统的设计与实现
基于激光雷达汽车防撞预警系统的设计与实现激光雷达是一种常见的感知设备,被广泛应用于汽车防撞预警系统中。
本文将从设计和实现两个方面介绍基于激光雷达的汽车防撞预警系统。
我们需要选择合适的激光雷达作为感知设备。
常见的激光雷达有机械扫描式和固态式两种。
机械扫描式激光雷达具有大范围扫描的特点,适用于需要全方位感知的场景。
固态式激光雷达则具有高精度、高更新率等特点,适用于需要高精度测量的场景。
根据具体需求选择合适的激光雷达。
接下来,我们需要设计感知算法,将激光雷达获取的点云数据转化为具体的障碍物信息。
常见的算法包括点云滤波、聚类、障碍物跟踪等。
点云滤波可以去除噪声点,提高感知结果的准确性。
聚类算法可以将点云数据按照距离、形状等特征进行分组,得到具体的障碍物信息。
障碍物跟踪算法可以实时跟踪障碍物的位置和速度等参数,为预警系统提供准确的输入数据。
然后,我们需要设计预警策略,根据障碍物的位置、速度等参数判断是否发出预警信号。
常见的预警策略包括距离预警、速度预警等。
距离预警可以根据障碍物与车辆之间的距离判断是否发出预警信号。
速度预警可以根据障碍物的速度与车辆的速度比较,判断是否发出预警信号。
我们需要实现防撞预警系统,并进行实验验证。
在实现方面,需要将激光雷达与车辆的控制系统进行接口设计,实现数据的传输和控制的输出。
在实验验证方面,需要选取适当的测试场地和测试场景,检验系统的性能和准确性。
基于激光雷达的汽车防撞预警系统设计与实现主要包括选择合适的激光雷达、设计感知算法、设计预警策略以及实现系统并进行实验验证。
通过这些步骤,可以得到一个性能良好,准确可靠的汽车防撞预警系统。
基于激光雷达汽车防撞预警系统的设计与实现
基于激光雷达汽车防撞预警系统的设计与实现激光雷达是当前汽车防撞预警系统中常用的一种传感器。
本文基于激光雷达技术,对汽车防撞预警系统进行了设计与实现,并对其性能进行了测试与评估。
我们对激光雷达进行了选择与安装。
激光雷达需要具备较高的测量精度和长距离探测能力。
我们选择了一款具备200米测量范围和高达1cm的测量精度的激光雷达,并将其安装在汽车前部中央位置,以获得最佳的探测效果。
然后,我们进行了激光雷达数据的处理与分析。
激光雷达会持续向四周发射激光束,并通过接收激光束的反射信号来确定前方物体的距离和位置。
我们使用嵌入式计算机来接收和处理激光雷达的数据,并通过算法将其转换为车辆前方物体的位置和相对速度。
接着,我们设计了车辆控制系统与预警系统的通信机制。
当激光雷达探测到前方物体与车辆距离较近且速度较快时,预警系统需要及时向车辆控制系统发送警报信号,以触发车辆的紧急制动或避让动作。
我们采用CAN总线作为车辆控制系统与预警系统的通信介质,并规定了相应的通信协议,确保信息的准确传递。
我们进行了系统的性能测试与评估。
我们在不同速度下对防撞预警系统进行了测试,测量了系统的反应时间和准确性。
测试结果表明,预警系统能够在车辆与前方物体距离较近时及时发出警报信号,且反应时间在毫秒级,具备较高的准确性和可靠性。
本文基于激光雷达技术设计并实现了一款汽车防撞预警系统。
通过对激光雷达数据的处理与分析,与车辆控制系统的通信机制以及对系统的性能测试与评估,我们证明了该系统具备较高的防撞预警能力和稳定性,能够有效提高汽车的安全性能。
基于激光雷达汽车防撞预警系统的设计与实现
基于激光雷达汽车防撞预警系统的设计与实现
激光雷达汽车防撞预警系统是一种利用激光雷达技术来实现对前方障碍物进行监测和预警的系统。
本文将在介绍系统设计与实现的基础上,逐步详述其原理与工作流程。
对于系统的设计,激光雷达是不可或缺的一个组成部分。
激光雷达可通过发射激光束并接收反射回来的激光,从而获取周围环境的信息。
也需要对激光雷达的信号进行处理和分析,以识别出障碍物并计算其距离与速度。
还需要一个显示器或者蜂鸣器来向驾驶员发出警告。
接下来,对于系统的实现,首先需要进行激光雷达的选择和安装。
激光雷达应该具备较长的测距范围和高精度的测距分辨率,同时在车辆上安装时要保证其稳定性和可靠性。
需要对激光雷达的信号进行处理。
主要包括激光雷达数据的解析和障碍物识别算法。
激光雷达数据解析主要是将激光信号转化为数字信号,以便后续的处理。
障碍物识别算法可以通过分析激光雷达数据中的反射点,并根据其位置和强度来判断是否有障碍物存在。
随后,需要对障碍物进行距离和速度的计算。
通过对激光雷达数据进行处理,可以得到障碍物的位置信息。
利用两帧数据之间的时间差,可以计算出障碍物的速度。
将结果显示给驾驶员。
可以通过一个显示器或者蜂鸣器来向驾驶员发出警告。
当检测到前方有障碍物距离过近或者速度过快时,系统会自动向驾驶员发出警告,以提醒驾驶员注意行车安全。
总结而言,激光雷达汽车防撞预警系统的设计与实现是一个综合了激光雷达技术、信号处理、障碍物识别和报警等多个方面的系统。
通过合理地设计和实现,可以有效地提高汽车驾驶的安全性和稳定性,降低交通事故的发生率。
基于激光雷达汽车防撞预警系统的设计与实现

基于激光雷达汽车防撞预警系统的设计与实现随着汽车的普及和城市化进程的加快,道路交通是人们生活中不可或缺的部分。
但是,交通事故一直是世界各国面临的难题。
为了降低交通事故的发生率,汽车防撞预警系统已经引起了世界的广泛关注。
本文将介绍一种基于激光雷达的汽车防撞预警系统的设计和实现。
1. 激光雷达的基本原理和特点激光雷达是一种利用激光束进行探测和跟踪的雷达。
它主要由激光发射器、光电探测器、信号处理器和数据处理器等组成。
激光雷达的工作原理是,通过激光发射器向目标发射激光束,当激光束遇到目标物体时,会反射回来,被光电探测器接收。
通过测量激光的时间延迟和频率变化等信息,可以确定目标物体的距离、速度、方向等参数。
激光雷达具有高精度、高可靠性、高分辨率、宽动态范围、抗干扰能力强等优点,因此在汽车防撞预警系统中得到了广泛应用。
2. 汽车防撞预警系统的工作原理汽车防撞预警系统会根据目标物体的距离、速度等参数来预测是否会与目标物体发生碰撞,并发出相应的警报。
如果司机没有及时采取措施避免碰撞,汽车防撞预警系统还可以根据预测结果自动制动。
汽车防撞预警系统主要由激光雷达、信号处理器、数据处理器、显示器等部分组成。
激光雷达的选择应根据目标检测的距离、角度、精度等需求进行选择。
同时,为了提高激光雷达的探测精度和稳定性,一般需要采用高精度的激光雷达控制器和滤波器等措施。
信号处理器主要负责从激光雷达中接收到的信号中提取有用的信息,并将其转化成数字信号传送到数据处理器进行处理。
为了保证信号的稳定性和可靠性,一般还需要采取多种滤波器对信号进行处理和优化。
数据处理器主要负责对激光雷达获取到的数据进行处理和分析,并根据预定的算法和逻辑来进行目标检测和预测。
为了提高系统的实时性和准确性,一般需要采用高速、低功耗的数据处理器。
显示器主要用于显示系统运行状态、目标检测结果和警报信息等。
4. 结论汽车防撞预警系统可以通过基于激光雷达的目标探测和预测来降低交通事故的发生率。
基于激光测距的自动防撞系统方案设计

基于激光测距的自动防撞系统方案设计引言:在现代社会中,交通事故频发,车辆防撞系统的研究与应用成为了一个非常重要的课题。
为了降低交通事故发生的概率,并保障车辆及乘客的安全,本文提出了一种基于激光测距的自动防撞系统方案设计。
该系统通过激光测距技术实时监测周围环境的距离,当检测到与前方车辆或障碍物的距离过近时,会自动触发防撞措施,包括警报、刹车等。
通过这种方式,能够提高车辆行驶的安全性和稳定性,有效减少交通事故的发生。
一、系统原理基于激光测距原理实现车辆防撞系统能够准确地感知车辆前方的障碍物,并及时做出反应。
该系统主要包括以下几个部分:1. 激光发射器:负责发射激光束,将激光束照射到前方的障碍物上。
2. 接收器:用于接收激光束反射回来的信号。
3. 信号处理器:对接收到的信号进行处理,提取有关障碍物的信息。
4. 控制器:根据处理器的分析结果,判断车辆与障碍物之间的距离,并采取相应的防撞措施。
二、系统设计为了实现自动防撞系统的功能,需要进行以下几个方面的设计:1. 激光发射器设计:激光发射器需要具备以下特点:发射功率稳定、发射角度可调、发射频率高、体积小。
通过优化设计,可以将激光束的功率和角度调整到最佳状态,提高系统的测距精度。
2. 接收器设计:接收器需要具备高灵敏度和高分辨率的特点,以确保能够准确接收到激光束反射回来的信号。
同时,还需要考虑抗干扰能力和抗光照能力,以应对不同的工作环境条件。
3. 信号处理器设计:信号处理器需要对接收到的信号进行放大、滤波和采样,同时还需要提取相关的距离信息。
通过合理的算法设计和优化,可以提高系统的测距精度和稳定性。
4. 控制器设计:控制器负责根据处理器提供的距离信息,进行判断,并根据预设的阈值进行相应的防撞措施。
例如,当检测到与前方车辆距离过近时,可以触发警报,警示驾驶员注意;当距离进一步减小时,可以自动刹车,避免发生碰撞。
三、系统优势通过基于激光测距的自动防撞系统,可以实现以下几个优势:1. 防撞效果好:激光测距技术可以实时、准确地监测周围环境的距离,及时发出警告或者进行控制,大大降低了车辆发生碰撞的概率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于激光雷达汽车防撞预警系统的设计与实现
随着汽车产业的快速发展和交通管理的不断完善,汽车安全技术也得到了很大的提升。
基于激光雷达的汽车防撞预警系统,是一种非常先进和有效的安全技术。
本文将介绍该系
统的设计原理和实现方法,以及其在汽车安全领域的应用前景。
激光雷达汽车防撞预警系统是一种利用激光雷达技术来实现汽车与前方障碍物之间的
距离测量和预警的系统。
其设计原理主要包括以下几个部分:
1. 激光雷达传感器
激光雷达传感器是系统中最关键的部分,它通过向前或向周围发射激光束,并利用激
光束的反射来测量汽车与前方障碍物之间的距离和速度。
激光雷达传感器具有高精度、高
速度和长测距范围等特点,是实现汽车防撞预警的关键设备。
2. 数据处理和算法
激光雷达传感器采集到的数据需要经过处理和分析后才能得出有效的预警信息。
数据
处理和算法部分主要包括数据滤波、目标检测、距离测量、速度计算和预警逻辑等内容,
通过这些处理和算法,系统可以准确地判断汽车与前方障碍物之间的距离和速度,并及时
发出预警信号。
3. 预警装置
预警装置是系统中负责向驾驶员发出预警信号的部分,可以采用声音、光信号或振动
等方式来提醒驾驶员前方有障碍物,并呼吁其采取措施避免碰撞。
二、激光雷达汽车防撞预警系统的实现方法
1. 硬件设计
硬件设计是实现激光雷达汽车防撞预警系统的基础。
激光雷达传感器的选型和布局是
最关键的一环,要选择具有高精度和长测距范围的激光雷达,同时合理布置传感器的位置
和角度,以确保能够准确测量汽车与前方障碍物之间的距离和速度。
预警装置的设计也需
要考虑到驾驶员的感知能力和反应时间,以确保可以及时有效地提醒驾驶员。
2. 软件设计
软件设计是激光雷达汽车防撞预警系统的核心。
数据处理和算法的设计是实现系统功
能的关键,需要结合激光雷达的特点和实际交通场景来设计相应的算法,以确保系统可以
准确地识别障碍物并及时发出预警信号。
软件设计还需要考虑系统的稳定性、实时性和可
靠性等方面,以确保系统在实际道路行驶中能够正常运行。
激光雷达汽车防撞预警系统是一种具有很大应用前景的汽车安全技术,其设计和实现涉及到激光雷达传感器、数据处理和算法、预警装置及硬件和软件设计等多个方面。
通过不断的技术创新和研发,相信激光雷达汽车防撞预警系统将能够为汽车安全领域的发展带来更多的可能性和机遇。