ADCP流速及流量测量原理[精制材料]
多普勒流速剖面仪(ADCP)与流速仪法流量对比分析
多普勒流速剖面仪(ADCP)与流速仪法流量对比分析摘要:随着时代的发展,水文仪器已进入高科技时代,ADCP即多普勒流速剖面仪是目前测量江河流量的最高端产品,但任何仪器设备都不是万能的,对于操作者来说将提出更高的要求。
本文通过与流速仪法对比分析,总结出了利用两种不同的方法所存在的差异,对于同行业使用ADCP测流具有一定的参考价值。
关键词:ADCP 流速仪对比分析1 情况简介松花江(六)站是松花江控制站,也是国家重要水文站。
该站位于吉林省德惠市松花江镇,设立于1923年1月,最初站名为松花江铁桥;1933年11月更改站名为松花江; 1966年6月经过几次迁移,最后为目前的松花江(六)水文站,集水面积51500km2。
畅流期采用牵船索人工摆舵船上测流。
该站ADCP于2008年就已经配置到位,近几年来一直在进行对比及操作训练,目前该站人员已经能够对ADCP进行熟练操作和使用,对比数据经计算分析合理可靠,具备投入使用的条件。
ADCP是利用多普勒效应原理进行流速测量。
ADCP因其原理的优越性,突破传统机械转动为基础的传感流速仪,用声波换能器作传感器,换能器发射声脉冲波,声脉冲波通过水体中不均匀分布的泥沙颗粒、浮游生物等反散射体反散射,由换能器接收信号,经测定多普勒频移而测算出流速。
ADCP具有能直接测出断面的流速剖面、具有不扰动流场、测验历时短、测速范围大等特点。
目前被广泛用于海洋、河口的流场结构调查、流速和流量测验等。
与传统的人工船测,桥测,缆道测量,和涉水测量的基本原理一样:在测流断面上布设多条垂线,在每条垂线处测量水深并测量多点的流速从而得到垂线平均流速,但ADCP所测的垂线可以很多,每条垂线上的测点也很多。
2 对比分析的目的通过对比ADCP测流与常规流速仪测流数据,分析之间存在差异的原因,可以尽量减少由于操作不当产生的误差,以便ADCP在本站更好地投入应用。
同时还可以解决本站由于偏角测量引起的流量改正等一系列问题。
ADCP简介及操作
1 H-ADCF简介1.1 ADCP 理论知识H-ADCP 是英文Horizontal Acoustic Doppler Current Profiler 的缩写。
中文通常译为水平声学多普勒流速剖面仪。
流速、流量测验方法的发明被认为是河流流量测验领域的一次革命。
它比传统的河流流量测验方法提高效率十几倍。
标志着河流流速、流量测验的现代化。
H-ADCP是一种利用声学多普勒原理测验水流速度剖面的仪器。
H-ADCP一般配备有二个(或四个)换能器。
换能器与轴线成一定夹角。
每个换能器既是发射器又是接收器。
换能器发射的声波具有指向性,即声波能量集中于较窄的方向范围内(称为声束,类似于探照灯发射的光束)。
换能器发射某一固定频率的声波,然后聆听被水体中颗粒物散射回来的声波。
假定颗粒物的运动速度与水体流速相同。
当颗粒物的运动方向是接近换能器时,换能器聆听到的回波频率比发射波频率高。
当颗粒物的运动方向是背离换能器时,换能器聆听到的回波频率比发射波频率低。
如前所述,假定水体中颗粒物的运动速度与水体流速相同,通过跟踪颗粒物的运动(称为“水跟踪”)所测验的速度是水流相对于(也即安装平台)的速度。
当安装在固定平台上,“水跟踪”测验的流速即为水流的绝对速度。
当安装在船上(移动平台),在“水跟踪” 测验的相对速度中扣除船速(平台的移动速度)后即得到水流的绝对速度。
H-ADCP流速坐标:声束坐标仪器坐标:X — Y流速数据: Ux, Uy注:不含罗盘H-ADCP用途:河流水文站或水情站流速、流量实时测验,明渠流速、流量实时测验;灌渠流速、流量实时测验;河流水质监测站总量实时监测;利用H-ADCP提供的流速和水位数据,应用指标流速法或数值方法计算流量。
河流、河口区流场数据采集,为流场数值模型提供标定或验证数据。
港口水域流场实时监测,为保证进出港船只安全提供流速数据。
海上采油平台附近流场实时监测H-ADCP应用:(1)通过电缆与电脑连接即可以作为一个独立的流速、流量在线监测系统。
ADCP流速及流量测量原理
随着海洋资源的开发利用,ADCP 在海洋工程、海洋观测和海洋能 源等领域的应用前景广阔。
环保监测
利用ADCP对水流、水温和水质等 进行实时监测,为环保部门提供准 确的数据支持。
农业灌溉
在农业灌溉领域,ADCP可用于测 量灌溉水的流量和流速,优化灌溉 方案,提高水资源利用效率。
未来展望
跨界融合
声学多普勒流速仪(ADCP)工作原理
ADCP主要由换能器、电子设 备、和数据存储器等组成。
换能器负责发射和接收声波 信号,电子设备处理接收到 的声波信号,数据存储器用
于存储测量数据。
ADCP通过向水体中发射声波 并接收反射或散射回来的声波 信号,利用多普勒效应计算出
流速。
流速测量的影响因素
悬浮颗粒浓度
声波发射
声波接收
流速计算
流量计算
利用声学多普勒效应,通 过测量声波在流体中传播 时因流体流速引起的频率 变化来推算流体的流速和 流量。
ADCP向流体中发射声波, 声波遇到流体中的颗粒或 障碍物后发生散射。
ADCP接收散射回来的声波 ,并分析声波频率的变化 。
根据声波频率的变化,结 合声波传播速度和流体物 理性质,计算出流体的流 速。
河流流速及流量测量
河流流速测量
ADCP通过向河水中发射声波,利用声波在水中的传播速度差异,测量水流的垂 直和水平方向速度分量,从而得到河流的实时流速。
河流流量测量
基于流速和断面面积,ADCP通过测量河流的断面面积,结合流速数据,计算河 流的流量。
海洋流速及流量测量
海洋流速测量
在海洋环境中,ADCP通过向海水发 射声波,利用声波在水中的传播速度 差异,测量海水的流速。
ADCP流速及流量测量原 理
ADCP流速及流量测量原理
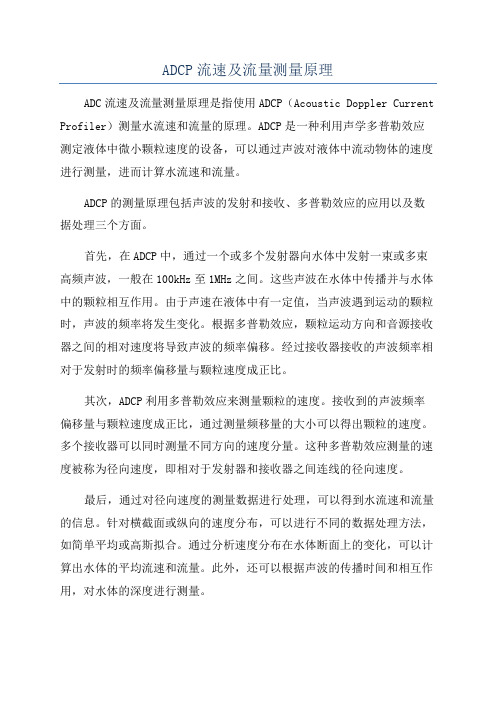
ADCP流速及流量测量原理ADC流速及流量测量原理是指使用ADCP(Acoustic Doppler Current Profiler)测量水流速和流量的原理。
ADCP是一种利用声学多普勒效应测定液体中微小颗粒速度的设备,可以通过声波对液体中流动物体的速度进行测量,进而计算水流速和流量。
ADCP的测量原理包括声波的发射和接收、多普勒效应的应用以及数据处理三个方面。
首先,在ADCP中,通过一个或多个发射器向水体中发射一束或多束高频声波,一般在100kHz至1MHz之间。
这些声波在水体中传播并与水体中的颗粒相互作用。
由于声速在液体中有一定值,当声波遇到运动的颗粒时,声波的频率将发生变化。
根据多普勒效应,颗粒运动方向和音源接收器之间的相对速度将导致声波的频率偏移。
经过接收器接收的声波频率相对于发射时的频率偏移量与颗粒速度成正比。
其次,ADCP利用多普勒效应来测量颗粒的速度。
接收到的声波频率偏移量与颗粒速度成正比,通过测量频移量的大小可以得出颗粒的速度。
多个接收器可以同时测量不同方向的速度分量。
这种多普勒效应测量的速度被称为径向速度,即相对于发射器和接收器之间连线的径向速度。
最后,通过对径向速度的测量数据进行处理,可以得到水流速和流量的信息。
针对横截面或纵向的速度分布,可以进行不同的数据处理方法,如简单平均或高斯拟合。
通过分析速度分布在水体断面上的变化,可以计算出水体的平均流速和流量。
此外,还可以根据声波的传播时间和相互作用,对水体的深度进行测量。
总之,ADCP利用声波与水体中微小颗粒相互作用,通过多普勒效应测量颗粒的速度,进而计算水流速和流量。
其原理包括声波发射和接收、多普勒效应的应用以及数据处理。
该技术在水文学和海洋学研究中得到广泛应用,可以用于测量河流、海洋和湖泊等水体的流速和流量,对水资源管理和环境保护具有重要意义。
ADCP测流基本原理以及在引黄济青中的应用

目前,针对水体流速测量,ADCP 主 要包含定点式和走航式两种测量方式,定 点式测量是在水流固定点上安装 ADCP, 例如水面桥墩,利用 ADCP 测量水体,因 仪器在固定一点上测量数值,所以,测定 水体所得数值为真实值,可直接应用于数 据处理。而走航式测量将 ADCP 安装于船 体水下部分,通过船体移动检测水体,因 ADCP 在移动状态下测量数据,所以测定 数据是一种以船体作为参照物的相对测定 值。假设水体流速与水体颗粒物的运动速 度相同,ADCP 对颗粒物运动进行水跟踪, 获得速度与 ADCP 速度相对。如果 ADCP 平台安装固定,水跟踪所得流速就是水流 绝对速度。若 ADCP 为移动安装,水跟踪 所得相对速度扣除平台移动速度,即可获 得水流绝对速度。
adcp是声学多普勒流速剖面仪的英文简称即acousticdopplercurrentprofiler是20世纪80年代初发展起来的一种利用声学多普勒原理测量水体流速剖面的仪器根据测定水体中微颗粒声后向散射的多普勒频移来测量水体速度它的换能器发射出一定频率的脉冲该脉冲碰到水体中的悬浮物质后产生后向散射回波信号
072
官方网站:
教育智库
电磁场与电磁波课堂 外延模式实践探究
◎◎ 周喜权
课堂教学是高等学校的主要教学形式,然而现有 的课堂教学模式与当前培养创新人才相背离。通过多 年来“电磁场与电磁波”的教学实践,探究出现有教 学模式应从利用现代教学手段出发,通过规划“电磁 场与电磁波”课堂外延过程,实现了课前目标引导自 学、课中优化指导吸收和课后消化应用等一系列有机 教学过程。
从岸边慢慢移动,船尽量向上游移动。 当船驶离岸边时,船的启动过程要缓慢驶 离岸边并且要到达对岸前也要放慢速度, 其目的是不让船速过快。选择岸的方向应 该选择面向下游的方向来确定左岸还是右 岸,左侧是左岸,右侧是右岸。 为了更好的测量结果,船的速度要尽 量小于水流的速度 , 使船尽可能向上游方 向逆流而上,可以使得船速慢下来并且可 以保持航向垂直于断面进行航行,测量的 结果会更准确一些。 在河两边靠岸处测量出两个深度单元 的位置要确定好,并且做好标记,他们代 表了该断面用来测量的起点与终点的位置; 当达到起点或终点那个位置时,要准确测 量出该点与岸边的距离 , 当达到需要估算 岸边流量的地方时,要尽可能地让 ADCP 不要移动。 采集至少往返 3 个测回,并允许样本 数据误差不超过 5%。
ADCP原理
ADCP原理1 说明这是声学多普勒流速剖面仪操作规则的第二版本:这是一个实际性的突破。
第一版本主要介绍了窄带声学流速剖面仪。
从那时开始,Teledyne RDI公司就已经介绍了宽带ADCP,并且最近在工作室越来越多的采用这种技术。
这一版本的修正反映了由宽带技术所引起的变化。
这个突破是基础性原则和实际信息的结合,而要理解宽带ADCPs如何工作和怎么使用它们正需要这些基础性原则和实际的信息。
这个突破将介绍一些基本的概念,它适用于大部分所介绍的规则,这些规则只能浅薄的处理它们。
要想进一步的学习,我们推荐使用在书目中所列的参考书目。
Teledyne RDI公司的历史Teledyne RDI公司坐落在CA San Diego,专门从事水下声学多普勒产品的设计和制造,这种设备大量应用于水流剖面和精确导航。
本公司的前身是RDI公司,这个公司由 Fran Rowe 和 Kent Deines在1982年创建。
这个公司的成立是第一个声学多普勒流速剖面仪工业发展的结果。
这个变革性的装置能够对水下的128个独立的监测点阵列进行剖面水流测量。
多年之后,RDI公司通过对新产品的发展、高级数据的质量和最高水平的服务质量和服务支持提供坚定的承诺,使它在工业中经历了稳步的发展并保持主导地位。
在2021年8月,RDI公司被Teledyne 科技公司收购,而现在它作为Teledyne科技有限公司的间接子公司来运作。
在这些成就的基础上,这个公司的名字变为 TeledyneRDI公司。
这个公司现在雇佣了200多个受过多种训练的科学家、工程师、销售人员和支持人员;拥有30,000平方英尺的符合ISO-9001:2000标准的设施,其中包括先进的工程技术,实验室,制造业和质量检测区。
ADCP的历史ADCPs的前身是多普勒计程仪,即测量船在水上或海底的速度。
第一个商业ADCP在1970’s中期制造。
它是一个商业性计程仪的改编。
为了更精确地测量水流的速度和能在超过一定深度剖面的单元内测量,人们重新设计速率日志。
走航式ADCP与流速仪法流量比测分析

走航式ADCP与流速仪法流量比测分析发表时间:2018-08-29T11:28:29.487Z 来源:《防护工程》2018年第8期作者:翟玉明[导读] 统计多次走航式ADCP与流速仪法流量测验结果,分析走航式ADCP流量测验误差的来源,探讨消除走航式ADCP流量测验误差的方法,从而提高走航式ADCP的测验精度,使ADCP技术广泛应用到生产实践中。
翟玉明江苏省水文水资源勘测局南通分局江苏省南通市 226010摘要:本文对走航式ADCP与流速仪法流量测验进行比测分析,统计多次走航式ADCP与流速仪法流量测验结果,分析走航式ADCP流量测验误差的来源,探讨消除走航式ADCP流量测验误差的方法,从而提高走航式ADCP的测验精度,使ADCP技术广泛应用到生产实践中。
关键词:走航式ADCP 流量误差计算模型前言:随着经济社会的发展和水利现代化要求,新时代对水文提出了新的要求。
现代水文是水利现代化可持续发展的技术支撑,“更全、更准、更快、更新”是对水文水资源信息服务的新要求。
近几年来,我国水文测报基础设施与技术装备得到了较快的发展,水文自动测报系统逐渐完善,水文测报的新技术、新仪器、新设备得到了广泛的运用。
特别是引进了声学多普勒流速剖面仪(ADCP)以后,达到了快速测得断面流量的要求。
但是对成果的准确性和精度的可靠性还得在实践中积累经验数据加以论证并建立流量模型才能把成果运用到生产实践中。
因此流量比测是必不可少的环节。
本文以走航式ADCP与流速仪法在营船港闸水文站的流量测验结果来分析走航式ADCP流量测验误差的来源及消除的方法,并建立流量计算模型。
一、营船港闸水文站基本情况营船港闸水文站属于国家基本水文站,测验项目有水位、降雨量、流量。
测流断面位于闸上游220米,断面宽94.0米,最深处河底高程为-2.69,稳定水位2.00米,两岸边坡为斜石坡。
测验设施包括水文缆道,电动绞车,86型旋杯式流速仪,走航式ADCP。
ADCP介绍

不同坐标下的流速及其转换
X = 声束3 & 4. Y =声束1 & 2. Z =垂直于X-Y
VU
VE
VN
V4 V1 V3
V2
V1, V2, V3, V4
VX, VY, Vz
VE, VN, VU
声束对
水平流速
非水平流速
1-2声束对
3-4声束对
流速矢量 实测流速分量 未测流速分量
流速空间分布及空间平均
ADCP 采样
呯
呯集合
平均步长
平均步长
平均步长
采样步长
采样步长
采样步长
ADCP在走航测量中测量如下数据:
相对流速(由“水跟踪”测出) 船速(由“底跟踪”测出, 或由GPS算出) 水深(由河底回波强度测出,类似于回声测深仪) 船的航行轨迹(由船速和计时数据算出,或由GPS算出)
水跟踪和底跟踪
水跟踪 由水中颗粒的回波测量水 流相对于ADCP的运动, 该功能叫做水跟踪。 底跟踪 由河底或海底的回波测量 河底或海底相对于ADCP 的运动,该功能叫做底跟 踪。如果河底或海底无推 移质,底跟踪测得的速度 即为测船的速度。
声束角(beam angle): 声束轴线(即换能器轴线)与ADCP轴线的夹角 。通常为20度、25度、或30度。
声束宽度(beam width): 以角度表示。即声束扩散角。声束宽度一般定 义为在换能器回波能量曲线上-3分贝对应的离声 束中轴线的角度。
声束坐标及沿声束方向流速
Fd = 2 F V/C
最小剖面深度 (minimum profiling range):
• 最小剖面深度取决于系统的盲区和最小单元 长度。 • 通常假定在垂线上至少保证两个有效单元, 则最小剖面深度的计算公式为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实操应用
13
坐标关系和速度转换
波束坐标系:V1、V2、 V3、 V4
仪器坐标系:U、V、 W、 e
1
U
V
W
e
2 sin
0
1 4 cos
1
实操应 2用2 sin
1 2 sin
0
1 4 cos
1 2 2 sin
0
1 2 sin 1 4 cos
1 2 2 sin
0
1 2 sin
现代海洋测绘
ADCP流速及流量测量原理
PPT by 陈志高
实操应用
1
声学多普勒流速剖面仪
• Acoustic • Doppler • Current • Profiler
起源:1980s 四大海洋观测仪器之一:
✓ 海洋 ✓ 湖泊 ✓ 河口
实操应用
2
基本概念
ADCP 是用于采集流 速大小和方向的声学设备
实操应用
8
多普勒频移
TRAIN APPROACHES-Higher Pitch
TRAIN RECEDES-Lower Pitch
实操应用
9
相对速度
• 悬浮颗粒物与换能器有相对运动才存在“多普勒 效应”
• 如果悬浮颗粒物运动垂直于(90度)换能器则没 有“多普勒效应”
• 知道了悬浮颗粒物与换能器发声方向的角度就可
1 4 cos 1
பைடு நூலகம்
V1 V2 VV34
2 2 sin 14
坐标关系和速度转换
地球坐标系:
如果存在安装误差或罗经误差
实操应用
15
流速剖面
• Acoustic • Doppler • Current
• Profiler
实操应用
16
传统流速仪法
流速测量
流量测量
起点桩
V Kn C
23
Distance = 15m
流量测量
0.2 0.3 0.4 0.5 0.2 0.3 0.4 0.5 0.1 0.3 0.4 0.5
0.3 0.3 0.4 0.2 0.3 0.3
0.2
Depth
实操应用
Q ENSEMBLE = 12.3 m3/s S Q = 18 m3/s
24
Distance = 21m
实操应用
5
声波发射
1 cm
Euphasiid
1 cm
Pteropod
1 mm
Copepod
实操应用
6
声波发射
• ADCP收到悬浮颗粒物反射回来的声波由于 悬浮颗粒物的相对速度而产生频移
• 这就是多普勒效应
实操应用
7
多普勒效应
• Acoustic
• Doppler
• Current • Profiler
Bottom
Short Pulse
Water-track
Long Pulse
Bottom-track
实操应用
20
盲区
上下盲区:
微断面
u u*
9.5 ( z )b z0
水深单元
左右盲区:
岸边距
V Vm
上盲区
下盲区
为流速系数:0.67~0.75
实操应用
实测区
岸边距 岸边区
21
Distance = 3m
ADCP
传统流速仪
实操应用
18
ADCP 测流回顾
• Acoustic – 以固定频率发射声波脉冲. • Doppler – 接受反射回来有“多普勒”频移
的声波,通过频移计算波束向的相对速度
• Current – 应用4波速向相对速度、波速间夹 角、姿态数据(首向heading,纵摇pitch,横摇 roll)
25
流量测量
Distance = 27m
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.8 0.2 0.3 0.4 0.5 0.6 0.6 0.8 0.8 0.1 0.3 0.4 0.5 0.5 0.6 0.7 0.7
0.3 0.3 0.4 0.4 0.5 0.5 0.5 0.2 0.3 0.3 0.3 0.4 0.4 0.4
0.2
0.2 Depth
0.1
流量测量
实操应用
Q ENSEMBLE = 1.5 m3/s S Q = 1.5 m3/s
22
Distance = 9m
流量测量
0.2 0.3 0.2 0.3 0.1 0.3
0.3 0.2
Depth
实操应用
Q ENSEMBLE = 4.2 m3/s S Q = 5.7 m3/s
以通过“多普勒”频移推算出悬浮颗粒物的运动
速度
实操应用
10
Time 0 Time 1 Time 1 Time 1
相对速度
8 Waves Measured
10 Waves 9 Waves
ADCP Transducer
A
Acoustic Beam
8 Waves 实操应用
Scatters 11
流速测量
流速剖面视为不同水 层(Bin)或深度单元( Bepth Cell)的流速
实操应用
3
基本概念
• Acoustic
• Doppler • Current • Profiler
实操应用
4
声波发射
• ADCP的换能器以固定频率向水体和水底分 别发射一个短脉冲和长脉冲声波
• 声脉冲由于水里颗粒物存在反射并被换能 器接收
V—流速(m/s) n —旋桨回转率,n=N/T(1/s) K —水力螺距(m) C为仪器常数(m/s)
V1
V2
V3 V4
f0
A1 D1A2
A3
f1 d1
D2 D3 f2
D4
d2
f3
d3
水面 fn fn-1
流速面积法
实操应用
17
流速剖面
✓ 实时 ✓ 多垂线 ✓ 多水深单元 ✓ 效率高 ✓ 量程大
水深单元
• Profiler – 测量不同层次(depth cell)的 流速
实操应用
19
走航式ADCP流速测量
(A)
Beam does not completely illuminate
bottom at one time.
(B)
Beam illuminates bottom completely
at one time
• Acoustic • Doppler
• Current
• Profiler
实操应用
12
流速测量
• ADCP通常具有3个以上换能器,同时发射和接 受3个波束以上的声信号,获得3个以上的相对 速度
• 信号按波束独立处理并转换成波束向相对速度 • 利用波速间的角度,将波束向(波束坐标)的
相对速度转换为水平和垂向速度(地球坐标)
流量测量
0.2 0.3 0.4 0.5 0.6 0.7 0.2 0.3 0.4 0.5 0.6 0.6 0.1 0.3 0.4 0.5 0.5 0.6
0.3 0.3 0.4 0.4 0.5 0.2 0.3 0.3 0.3 0.4
0.2 0.2 0.3
Depth
实操应用
Q ENSEMBLE = 17.1 m3/s S Q = 35.1 m3/s