凸轮测量测头转换及当量升程表计算方法2008
凸轮计算

以纵坐标代表从动件位移s2 ,横坐标代表凸轮转角δ1或t, 所画出的位移与转角之间的关系曲线。
O
B'
h
A
δs' D δt
δh δs
w
B
C
s2
BC
h
A
δt
δs
D Aδ1
δh δs' t
2p
上升—停—降—停
凸轮轮廓曲线的形状决定了凸 轮机构从动件的运动规律。
谢谢
§6-2 凸 轮 机 构
目录
内容一 内容二 内容三 内容四 内容五
凸轮机构的组成、特点 凸轮机构的类型 凸轮机构的应用 凸轮机构的有关参数 凸轮机构运动规律
Frtyftuf4564564r
三、凸轮机构的应用
车床仿形机构
四、凸轮机构的有关参数
基圆 凸轮理论轮廓上最小半径所画
的圆
基圆半径 最小半径rmin称为基圆半径
四、凸轮机构的有关参数
行程(升程)
主动件转过一个角度,从动件 到达最高位置,此时从动 件的最大升距称为行程。
转角(运动角)
凸轮转过的角度δ称为转角。
B' A
δt
h
D
O
δs w
B
C
四、凸轮机构的有关参数
推程 AB——从动件被凸轮轮廓
推动从最低点A旋转到最高点B的 过程。
推程运动角δt——与推程对应的
凸轮转角。
远休止角δS——从动件在最高点
静止不动所对应的角。
回程CD ——从动件在弹力或重
力作用下,从最高点B'下降到最 低点A的过程
回程运动角δh ——与回程对应的
凸轮转角。
一种凸轮轴凸轮升程的检测方法[发明专利]
![一种凸轮轴凸轮升程的检测方法[发明专利]](https://img.taocdn.com/s3/m/b2ec695a24c52cc58bd63186bceb19e8b8f6ec94.png)
(10)申请公布号 CN 102721346 A(43)申请公布日 2012.10.10C N 102721346 A*CN102721346A*(21)申请号 201210184018.2(22)申请日 2012.06.01G01B 5/02(2006.01)G01B 5/20(2006.01)(71)申请人浙江师范大学地址321004 浙江省金华市浙江师范大学36信箱(72)发明人俞红祥(74)专利代理机构金华科源专利事务所有限公司 33103代理人黄飞(54)发明名称一种凸轮轴凸轮升程的检测方法(57)摘要本发明属于机械方法类,具体是一种凸轮轴凸轮升程的检测方法,其特征在于:在底座一端上安装一转台与一尾架,尾架顶尖轴线与转台顶尖轴线重合;采用转台顶尖与尾架顶尖分别压紧凸轮轴两端中心孔;将一弹性伸缩测量头安装在直线导轨上;转台装有驱动电机和旋转角度编码器,弹性伸缩测量头装有直线位移传感器,旋转角度编码器与直线位移传感器连接至测控系统;凸轮轴在转台带动下转动,转动过程中测控系统检测凸轮每一转角位置的测量头直线位移,从而确定被测凸轮轮廓参数,并通过设定的从动挺杆参数计算出凸轮每一转角位置的升程。
本发明简便易行,科学合理,测量精度高。
(51)Int.Cl.权利要求书1页 说明书2页 附图1页(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书 1 页 说明书 2 页 附图 1 页1/1页1.一种凸轮轴凸轮升程的检测方法,其特征在于:在底座一端上安装一转台,在底座另一端与转台相对位置安装一尾架,转台与尾架上分别安装顶尖,尾架顶尖轴线与转台顶尖轴线重合;采用转台顶尖与尾架顶尖分别压紧凸轮轴两端中心孔;将一弹性伸缩测量头安装在直线导轨上,弹性伸缩测量头可沿被测量凸轮轴轴向平行移动,测量头在凸轮法平面内与凸轮表面的接触形式为点接触;测量升程时,弹性测量头移动至被测量凸轮的法平面内,测量头中心线指向被测凸轮基圆中心;转台装有驱动电机和旋转角度编码器,弹性伸缩测量头装有直线位移传感器,旋转角度编码器与直线位移传感器连接至测控系统;凸轮轴在转台带动下转动,转动过程中测控系统检测凸轮每一转角位置的测量头直线位移,从而确定被测凸轮轮廓参数,并通过设定的从动挺杆参数由测控系统计算出凸轮每一转角位置的升程。
摩托车发动机凸轮逆序测量及参数反求方法

ቤተ መጻሕፍቲ ባይዱ
l l . l
0
摩托车发动机凸轮逆序测量及参数反求方法
刘兴 富 ( 广州威而信精 密仪 器有限公 司)
刘瑞玲 ( 陕西五环 ( 集 团)实业有限责任 公司)
摘 要 : 逆序 测量时 ,应 选 用与凸轮 机构从 动件形状和 大小相 同的测 头对 实物 凸轮进 行测量 ,本文
3 8 摩托车技术 2 0 1 3 . 0 1
性 也得 到 了很大提 升 ,现 已用于 实 际生产 当 中。田
( 收稿 日期 2 0 1 2 . 1 1 - 1 9 )
j 蟹 : . 薯 ; 圈口囫
凸轮 逆 序测 量 ,是为 摩托 车样 件 实物 凸轮 的参 数设 计
反 求提 供 原 始 数 据 的测 量 ,对 于 摩 托车 样 机 的 实物 凸轮 ,
设备状态 轮组调整时间 轮组 日产量 秒/ 套/ 人 套/ 天/ 人 改进前 改进后 6 0 0 7 5 4 8 3 8 O
装 配精度
人 工控制 ,一致性差 工装控制 ,一致性好
图6 实 际设备工作图
由表 5看 到 ,通过 使用 机械 系统替 代原 手工 调整 ,不 仅 大大提 高 了轮 组调 整的 产量 ,同时 装 配 质量 和 生产 一致
— —
敏 感点 m 的 凸轮 转 角
敏 感点 1 3 " 1 的升 程值
—
—
尤 其是 进 口样 件 凸轮 , 由于磨 损 等 原 因 ,通 过 逆序 测 量 ,
h m ' — — 敏感 点 m 的升程 变化 率
— —
难以复现其原始设计参数 ( 原型线 函数 ) ,需通过反求程
序 来完 成 凸轮原 始 设计 参数 的一 系列 技术 工作 。 准确 确 定 凸轮 的测量 位 置 ,是 发 动机 凸轮精 密 测量 的 最 基本 程序 ,也是 保证 获得 准 确测 量数 据 的必要 条 件 。顺
凸轮计算方法
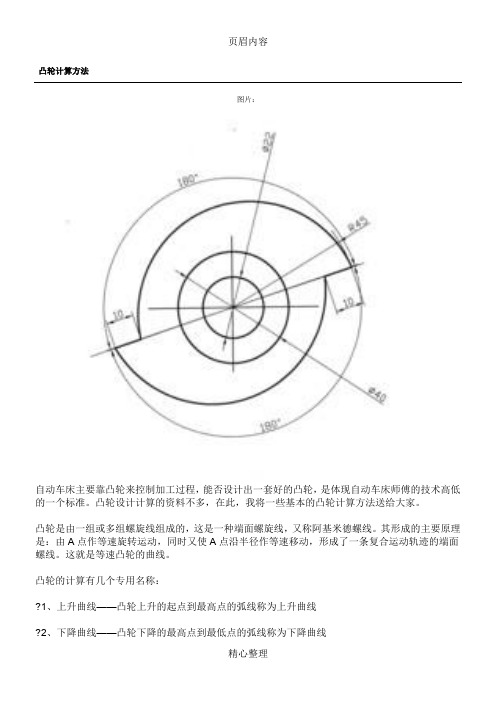
凸轮计算方法图片:自动车床主要靠凸轮来控制加工过程,能否设计出一套好的凸轮,是体现自动车床师傅的技术高低凸轮是由一组或多组螺旋线组成的,这是一种端面螺旋线,又称阿基米德螺线。
其形成的主要原理是:由A点作等速旋转运动,同时又使A点沿半径作等速移动,形成了一条复合运动轨迹的端面螺线。
这就是等速凸轮的曲线。
凸轮的计算有几个专用名称:?1、上升曲线——凸轮上升的起点到最高点的弧线称为上升曲线?2、下降曲线——凸轮下降的最高点到最低点的弧线称为下降曲线?3、升角——从凸轮的上升起点到最高点的角度,即上升曲线的角度。
我们定个代号为φ。
?4、降角——从凸轮的最高点到最低点的角度,即下降曲线的角度。
代号为φ1。
?5、升距——凸轮上升曲线的最大半径与最小半径之差。
我们给定代号为h,单位是毫米。
?6、降距——凸轮下降曲线的最大半径与最小半径之差。
代号为h1。
?7、导程——即凸轮的曲线导程,就是假定凸轮曲线的升角(或降角)为360°时凸轮的升距(或降距)。
代号为L,单位是毫米。
车削球面圆弧零件的凸轮设计计算CM1107机床调整卡及凸轮设计CM1107机床调整卡及凸轮设计自动车床在投入生产之前,必须做好以下几项生产准备工作:1.拟订零件的加工工艺过程,选用适当的切削用量标准刀具和辅具,必要时设计特殊的刀辅具;2.根据零件的加工工艺,拟订机床调整卡;3.根据调整卡的数据,设计并制造凸轮;4.按照调整卡调整机床下面以零件“轮轴”的加工为例(见表2-2)说明拟订工艺过程的注意事项,调整卡的制定方法和凸轮曲线的绘制方法。
(一)零件的加工工艺过程的拟订加工工艺是指定调整卡和设计凸轮的基础,合理的加工工艺是发挥机床效能和提高产品质量的有力保证。
拟订加工工艺时,除了应遵循《机械制造工艺学》和《金属切削原理和刀具》课程中所指出的一般原则外,还应当考虑单轴纵切自动车床的特点,注意下列几点:No4与No3刀No1刀架车削。
No3刀架5表2-2根据加工方式和工件及刀具材料,按自动车床切削用量选择切削速度v(机床说明书内通常附有这些资料)。
椭圆凸轮的测量与计算

这里应 提醒 ,式 ( 2 ) ~式 ( 5 ) 中 为椭 圆
凸轮转角 ( 0 。 ,1 。 , 2 。 ,…, 3 6 0 。 ) ,O t 的理论值由
b)尖端 测 头
图 2( 续)
设计给出,测量时一般按 1 。 间隔取值 。 同理 ,当选用 平顶测 头测 量时 ( =∞ ) ,图 2 变成 了图 3形式 。建 立椭 圆 凸轮 的切线 方 程 ( 包 络
如 图 3,与椭 圆凸 轮相 切 直线 ( 平 顶测 头 的 端
面 ) 方程 的斜截式 为 Y= + p ( 6 )
对应理论转角 的升程 ,应将 计算式 中的参变 角 表示 为 凸轮转 角 的 函数 : 。 = ( ) 。由图 2 b )
几何关 系可得
t a n :上
式 中 :k为与椭 圆 凸轮相切 直 线 的斜 率 ( k= t a n O=
一
c o t a ) ;P为 与椭 圆 凸轮 相 切 直线 的纵 截 距 ( P=
,
≠0 。 ,1 8 0 。 和3 6 0 。 ) ;0 为 与椭 圆凸轮 相切
将 = ( b+r 。 )C 0 S 0  ̄ ,Y= ( a+r )s i n a 代 人上式 ,进行 推导后 得到
… n
Sl I l O ̄
直线 的斜角 ; 为椭 圆凸轮 转角 。 将 k和 P代人 式 ( 6 ) ,与椭 圆 凸轮相 切直 线 的
方 程式 为 y s i n a+ X C O S  ̄一 ( r 0 + ) = 0 ( 7 )
( n
将式 ( 2 ) 、式 ( 3 ) 中的参变 角 用 上式 参变 角的 函数 式代换 ,就 得到 了椭 圆 凸轮 对应 转 角 的球
摩托车发动机凸轮测量常见问题的解决方法

关键词 : 摩托车 发动机 凸轮
测量 问题
解决方法
S l t n f rCo m o r b e sDu i g t eM e s r m e t o u i o m o n P o lm rn a u e n h
Abs r c : Th e s r m e to a r fl fm o o c ce e ie b ln o t em e s r m e tf rs a e ta t e m a u e n fc m p o e o t r y l ngn e o gst h a u e n o h p i a d l c t o e a c . n o ai t lr n e Thec ieo sm e s rng sa ad s o d m e t h e u r m e t fs a e a d l c t n on hoc fi a u i tnd r h ul e er q ie n so h p n o ai t t o
量 基 准 。 参  ̄G / 12 19  ̄ 准要 求 , 凸轮 型 线形 状 公差 带取 决 于被 测 凸轮 的理 想 几何 形状 和 设 计要 B T 18- 9 6 ,
求,并 以此来评 定凸轮形 线的形状误 差 。测量 时 ,理想 凸轮 的位 置应按 “ 小条件”原则确 定,即两同 最
h 一 Ah
基 准 引入 凸轮 自 测 量程 序之 中 ,并 作 出测量 结 果更 接近 动
实 际 的结论 , 但这 些设 计者 却 恰恰 忽 略 了最重 要 的一 点 ,
A j _ a h 一
( 5 )
假设 Ah = Ah,则 Ah 一 Ah 0 ()式 的分 = , 5
顶置凸轮配气机构气门升程的精确计算

・文摘・顶置凸轮配气机构气门升程的精确计算苏军申屠淼(江苏理工大学力学系 , 镇江 212013为使发动机布置得更紧凑 , 提高配气机构的刚性与减轻运动件的质量 , 以适应高转速的要求 , 许多现代的四冲程发动机都采用顶置凸轮配气机构 , 其中一些汽车、摩托车发动机的顶置凸轮配气机构的结构形式如图 1所示。
图 1顶置凸轮摇臂机构现对以上典型结构的气门升程的计算方法与公式进行了推演 , 以供应用参考。
假定摇臂为绝对刚体。
(1 将凸轮升程表换算为极坐标升程表 h ( 。
(2 建立 2个坐标系 , 一个为定坐标系 x Oy ; 另一个为随凸轮转动的动坐标系 x Oy (详见图 2 。
两坐标系原点 O 均在凸轮轴心 ; 横坐标 Ox垂直于凸轮轴图 2顶置凸轮配气机构简图线 , 平行于气缸盖底平面 ; 横坐标 Ox 垂直于凸轮轴线 , 并令其通过凸轮升程廓线过渡段的起点 ; 认定摇臂初始位置 , 即 =0°。
此时 Ox 与 Ox 的夹角为 : 0=180-arctg1-x 1-arctg 1R +S 1(1 式中 :x 1和 y 1为摇臂中心 O 1在定坐标系中的坐标 ; L 1为 O 1点至 M 点的距离 ; M 点为摇臂零件图中水平中心线与 OP 0的交点 ; S 1为 OP 0线上 R 3圆弧面至 M 点的弦高 ; R 为凸轮基圆半径。
(3 计算出 R 3圆弧的圆心 P 0在定坐标系 x Oy 中的坐标位置。
x P 0=(R +R 3 ・ cos 0y P 0=(R +R 3 ・ sin 0(2式中 :R 3为摇臂凸轮侧臂圆弧的半径。
当凸轮转过角度时 , 凸轮廓线与摇臂 R 3圆弧面的接触点在 C (x C , y C 点。
在凸轮转动中 , R 3圆弧面上的接触点 C 在 C L 和 C R 之间变动 ; 而 C 点在凸轮廓线上则是在 x Oy 坐标系中逆旋转方向而变动。
令 OC 与 Ox 的夹角为。
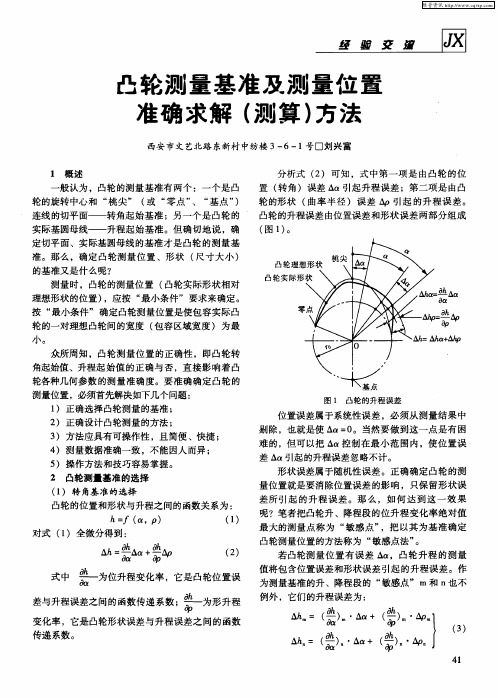
凸轮测量基准及测量位置准确求解(测算)方法
(
(
计 算 表 明 ,凸 轮 采 用 平 面 测 头 测 量 时 =l , 采 用滚 柱 测头 测量 时 =l~10 l .3 ,可 以认 为 凸
确定 凸轮测量 位 置 的方 法是 以 凸轮 升 、降 程段 的 “ 敏感 点” 为 基 准 ,并 使 它 们 的升 程 误 差 相 等。 具体 过程 ( 推导 、求解 )如下 : 如图 2 ,设 凸 轮理论 位置 ( 始转 角 。 的理 起 ) 论升 程 曲线 为 h ( ,而测 量 位置 ( 始转 角 。 ) 起 ) 的实 际 升 程 曲线 为 h ( ) 。与 。之 间 的 位 置 , ( 度)差为 △ 角 。 当以 。为起 点 转 角 使 凸轮 转 过
2 凸轮测 量基 准 的选 择 ( ) 转 角基 准的 选择 1
’
|
、 .
/
上
\
图 1 凸轮 的升 程 误 差
位置误 差 属 于系统性 误 差 ,必 须 从 测量 结 果 中 剔 除 ,也 就是 使 A 0 a= 。当然要 做 到 这 一 点是 有 困
难的,但可以把 A a控制在最小范 围内,使位置误
西安 市文 艺北路 东新村 中纺楼 3—6—1号 口刘 兴富
1 概 述
一
分 析式 ( ) 可 知 ,式 中第 一 项 是 由凸 轮 的 位 2 置 ( 角 )误差 A 转 a引起 升 程误 差 ;第 二项 是 由凸
般认 为 ,凸轮 的测 量 基 准有 两 个 :一 个 是 凸
轮 的旋 转 中心 和 “ 尖 ” ( “ 点 ” “ 点 ” 桃 或 零 、 基 ) 连 线 的切平 面—— 转 角起 始 基 准 ;另 一个 是 凸轮 的 实 际基 圆母 线—— 升 程起 始 基 准 。但 确 切 地说 ,确 定 切平 面 、实 际基 圆母线 的 基 准才 是 凸轮 的测 量 基 准 。那 么 ,确定 凸轮 测 量 位 置 、形 状 ( 寸 大 小 ) 尺
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮测量测头转换及当量升程表计算方法2008-6-5 来源:中国机床商务网摘要:通过凸轮测量实例,对凸轮测量时的测头转换所引发的当量转角—升程表问题进行了分析,指出测头转换应保证凸轮受检位置不变,并以S195 型柴油机配气凸轮为例,推导出了当量转角、当量升程的计算通式并给出由平面测头转换为?15mm 滚柱测头测量的当量转角—升程表。
1 概述
凸轮轴是影响发动机配气机构工作质量的关键部件,它的功能是保证发动机气门组有准确、平稳的良好运动规律。
凸轮的测量,主要是为评定凸轮轴上各凸轮的几何精度和装机后的动力特性提供依据,所以,在对凸轮进行测量时,应按设计要求选择与凸轮机构从动件(挺柱)相同形式和形状的测头,按设计要求给出的转角—升程表进行测量,以正确反映凸轮机构的运动规律。
2 测头转换
测头转换,不是指简单地将一种测头换成另一种测头,而是指采用不符合设计要求形式和形状的测头进行凸轮测量时测量参数的转换。
在测量中,把不符合设计要求形式和形状的测头卸下,装上符合设计要求形式和形状的测头的一组操作称为测头换装。
测头转换和测头换装是两个截然不同的概念。
无论是确定凸轮的检测位置,还是测量凸轮的升程,都应采用与凸轮机构从动件(挺柱)相同形式和形状的测头。
例如,S195 型柴油机的配气凸轮的从动件是平面挺柱,测量时应采用平面测头:供油凸轮的从动件是滚柱挺柱,测量时应采用与滚柱挺柱直径相同的滚柱测头。
可是,常常是当同一根凸轮轴上各凸轮的从动件设计要求不同时,本应分别采用符合设计要求的不同形式和形状的测头进行测量,可是一些测量者为了省去在测量过程中换装测头的麻烦,竟用同一测头去测量凸轮轴上各个凸轮,这对某一个凸轮而言就引发了测头转换问题,尤其是在凸轮自动测量时,这种转换测头形式和形状的现象更为普遍。
图1 凸轮受检点相同时测头不同凸轮转角不同
图2 将平面测头转换为滚柱测头时当量转角和当量升程的求解
测头形式和形状转换后,改用当量升程表测量,原理上并不存在问题。
但是现行当量升程表,一般均以设计转角为依据而不是以设计受检点为依据来计算。
也就是说,如果测头转换后与转换前的转角一致,则凸轮受检点将不同:如果测头转换前后受检点相同,则凸轮转角不同。
例如,S195 型柴油机配气凸轮的“敏感点”m,采用设计要求的平面测头测量时,凸轮转角ap=46°07'16"(图1a):采用?15mm 滚柱测头时,凸轮转角aG=16°53' (图1b):采用刀口测头时,凸轮转角aD= 6°52'28"(图1c)。
即凸轮同一受检点的ap≠aG≠aD。
由此可知,测头形式和形状转换后,如仍按设计转角来计算当量升程,则凸轮设计受检点的位置就被篡改了,从而会由于测头转换前后受检点处凸轮形状误差不同,影响凸轮测量数据的准确性,甚至可能造成对凸轮合格性的判断错误(误废或误收)。
3 当量升程表
当遇到由于测量工艺条件的限制无法采用符合设计要求的形式和形状的测头时,例如,摩托车发动机顶置凸轮轴式的配气凸轮,必须将摇臂与凸轮型面接触的摆动式柱面的气门升程转换成对心移动式平面测头的凸轮升程(转换计算见杨光兴等所著《摩托车发动机原理与设计》(武汉测绘科技大学1993年出版社中第297页),采用平面测头才有利于凸轮的加工和测量。
又如S195型柴油机凸轮轴,设计要求配气(进、排)凸轮用平面测头测量,供油凸轮用?15mm 滚柱测头测量,如果统一采用?15mm滚柱测头,这时配气凸轮测量就进行了测头转换。
同一根凸轮轴上各凸轮统一采用一种测头测量,有利于凸轮自动测量。
当量转角—升程的计算:假设凸轮最大升程(桃尖)时的转角为零,当凸轮转过某一角度,凸轮与测头i点接触(i为受检点)时,对平面测头来说凸轮转角为ap,对应升程为hp:对滚柱测头来说凸轮转角为aG,对应升程为hG。
如设图2中的OOi=Li,OiO1=ri+rc,则在?OO1A 中
OA=OOi+OiA=Li+(ri+rc)cosap
O1A=(ri+rc)sinap
aG=tg-1{(ri+rc)sinap/[Li+(ri+rc)cosap]}
考虑公式适应凸轮轮廓各段,将上式改写为aG=tg-1{(ri+rc)sinf(ap)/[Li+(ri+rc)cosf(ap)]}(1) iO1中,根据余弦定理可得
(ri+rc)2=( ro+hG+rc)2+Li2-2Li( ro+hG+rc)cosaG
展开上式化简并考虑适应各段,得hG=(ri+rc)cossin-1[Lisinf(aG)/(ri+rc)]+Licosf(aG)-( ro+rc)(2)
附表当量转角—升程表
(S195 型柴油机配气凸轮)受检点设计升程表
(用平面测头)当量升程表
(用?15mm 滚柱测头)备注
序号
(i)转角
(ap)升程
(hp)转角
(aG)升程
(hG)
10°7.55000°7.5500顶圆段
21°7.54720°22'7.5490顶圆段
32°7.53870°44'7.5459顶圆段
65°7.47951°50'7.5246顶圆段
1110°7.26903°40'7.4483顶圆段
2120°6.43437°20'7.1422顶圆段
3130°5.071611°6.6283顶圆段
4140°3.221714°40'5.9000顶圆段
4645°2.131516°30'5.4521顶圆段
4746°07'16"1.873116°53'5.3512敏感点
4847°1.674819°58'4.2962复圆段
4948°1.464723°03'3.6002复圆段
5049°1.271226°07'2.9822复圆段
5150°1.094429°12'2.4304复圆段
5655°0.461844°36'0.5785复圆段
6160°0.000060°0.0000接点
6261°0.247660°02'0.2321过渡段
6362°0.241060°04'0.2150过渡段
6463°0.229860°06'0.1986过渡段
6564°0.214060°08'0.1828过渡段
6664°00'53"0.213960°08'08"0.1827接点
6765°0.196565°0.1765缓冲段
7170°0.119570°0.1071缓冲段
7675°0.061275°0.0548缓冲段
8180°0.022180°0.0198缓冲段
8887°30'0.000087°30'0.0000缓冲段
如果将配气凸轮的平面测头转换为刀口测头测量时,可令式(1)、(2)中的rc=0,即aD=tg-1[risinf(ap)]/[ Li+ricosf(ap)](3)
hD=ricossin-1[Lisinf(aD)/ri]+Licosf(aD)-ro(4)
式(1)~(4)中:ro为凸轮基圆半径:rc为滚柱测头半径:ri为受检点的曲率半径:Li为凸轮受检点曲率中心与基圆中心间的距离:ap、aG、aD为平面、滚柱、刀口测头转角:hp、hG、hD为平面、滚柱、刀口测头升程。
f(ap)、f(aG)、f(aD)随受检点位置所在凸轮轮廓段不同而变化。
例如S195柴油机配气凸轮,受检点在顶圆段为ap、aG、aD,在复圆段为(60°-ap)、(60°-aG)、(60°-aD)……。
附表给出按通式(1)、(2)计算出的当量升程表实例。
4 几点说明
测头形式和形状的转换,只是在受到测量工艺条件限制无法采用符合设计要求形式和形状测头进行凸轮测量的特殊场合,为方便凸轮的加工和测量所采用的工艺措施。
当量升程表的计算应以设计受检点为依据,而不应以设计转角为依据。
即测头转换应遵守凸轮受检点位置不变原则。
依据受检点计算出的当量转角,一般都是度分秒的角值,会给凸轮测量,特别是凸轮自动测量带来不便。
为此,可以运用插值方法求出受检点近似整数度(或整数分)值的当量升程。
现行的当量升程表是以设计转角为依据的,它偏离了设计受检点的位置,所以按现行当量升程表进行凸轮测量,是与凸轮要求相悖的,是不可取的。
文章链接:中国机床商务网/Tech_news/Detail/1682.html。