微机原理直流电机测速实验
微机原理无刷DC风机调速及测速.doc
微机原理无刷DC风机调速及测速理工学院微机原理(三级)项目报告名称:微机原理课程设计项目名称:无刷DC风扇速度调节和速度测量讲师;█ █部门:机电专业:机械设计、制造和自动化团队成员的信息科学数量;姓氏:王█ █团队成员信息编号:姓氏:郭█ █完成时间:结果从XXXX 12月1日到XXXX 1月3日:审阅者:目录一、学习目标 (1)第二,该项目要求 (1)第三,速度测量和调节系统的硬件构成 (1)四、程序流程图和解释思路 (3)五、风机转速与占空比的关系表及曲线 (4)六、设计过程 (5)七、设计问题分析 (12)八.计划摘要 (13)一、学习目标本系统作业的目的是:(1)通过脉宽调节改变无刷直流风扇的转速;(2)通过风扇旋转时产生的脉冲信号测量并显示风扇的转速;(3)将每个风扇组从某一转速(600转/分)到另一转速(XXXX 12月1日至XXXX 1月3日)的结果进行比较:审阅者:目录一、学习目标 (1)第二,该项目要求 (1)第三,速度测量和调节系统的硬件构成 (1)四、程序流程图和解释思路 (3)五、风机转速与占空比的关系表及曲线 (4)六、设计过程 (5)七、设计问题分析 (12)八.计划摘要 (13)一、学习目标本系统作业的目的是:(1)通过脉宽调节改变无刷直流风扇的转速;(2)通过风扇旋转时产生的脉冲信号测量并显示风扇的转速;(3)比较每组风扇从某一速度(600转/分)稳定运行到另一速度(2000转/分)所需的时间。
通过比较测试结果的估计结果并讨论产生差异的主要原因,学生可以展示他们对无刷直流风扇数学模型建立和调整方法的局限性的深入理解。
二.项目要求检查项目要求速度显示风扇速度可在发光二极管上显示,速度单位为r/min,刷新周期约为1秒,风扇速度可调节,风扇速度可在700时改变:根据要求接线:黄线连接到Vcc,黑线接地,绿线连接到P3 ,蓝线连接到P2 .输出:输出,如下图所示Iv .画一个程序流程图并解释程序思想。
微机原理与汇编语言程序设计-直流电机转速控制模板

实验课题:直流电机调速控制实验内容:本实验完成的是一个实现对直流电机转速调节的应用。
编写实验程序,用ADC0809完成模拟信号到数字信号的转换。
输入模拟信号有A/D转换单元可调电位器提供的0~5V,将其转换后的数字信号读入累加器,做为控制电机的给定转速。
用8255的B口作为直流电机的控制信号输出口,通过对电机转速反馈量的运算,调节控制信号,达到控制电机匀速转动的的作用。
并将累加器中给定的转速和当前测量转速显示在屏幕上。
再通过LED灯显示出转速的大小变化。
实验目的:(1)学习掌握模/数信号转换的基本原理。
(2)掌握的ADC0809、8255芯片的使用方法。
(3)学习PC系统中扩展简单I/O接口的方法。
(4)了解实现直流电机转速调节的基本方法。
实验要求:利用微机接口实验系统的硬件资源,运用汇编语言设计实现直流电机的调速控制功能。
基本功能要求:1、利用A/D转换方式实现模拟量给定信号的采样;2、实现PWM方式直流电机速度调节;3、LED灯显示当前直流电机速度状态。
实验设备:(1)硬件要求: PC微机一台、TD-PIT实验系统一套(2)软件要求:唐都编程软件,tdpit编程软件,“轻松编程”软件实验原理:各芯片的功能简介:(1)8255的基本输出接口电路:并行接口是以数据的字节为单位与I/O设备或被控制对象之间传递信息,CPU 和接口之间的数据传递总是并行的,即可以同时进行传递8位,16位,32位等。
8255可编程外围接口芯片是具有A、B、C三个并行接口,+5V单电源供电,能在以下三种方式下工作:方式0—基本输入/出方式、方式1—选通输入/出方式、方式2—双向选通工作方式。
8255的内部结构图和引脚图如下:本实验利用8255的A口作为输出口,控制8个单色LED灯,来实现电机转速的大小显示。
(2)转速调节原理:* PWM的占空比决定输出到直流电机的平均电压.PWM不是调节电流的.PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压.所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节.在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:1.使用PWM信号,控制三极管的导通时间,导通的时间越长,那么做功的时间越长,电机的转速就越高2.使用PWM控制信号控制三极管导通时间,改变控制电压高低来实现** 利用实验平台上8255的PB0产生脉冲信号作为控制量,经驱动电路驱动电机运转。
直流电机转速测量与控制实验
直流电机转速测量与控制实验1、实验目的:了解霍尔器件工作原理及转速测量与控制的基本原理、基本方法,掌握DAC0832电路的接口技术和应用方法,提高实时控制系统的设计和调试能力。
2、实验内容:设计并调试一个程序其功能为测量电机的转速,并在超想-3000TB综合实验仪显示器上显示出来,采用比例调节器方法,使电机转速稳定在某一设定值。
此设定值可由超想-3000TB综合实验仪上的键盘输入。
3、工作原理:转速是工程上一个常用参数。
旋转体的转速常以每秒钟或每分钟转数来表示,因此其单位为转/秒、转/分,也有时用角速度表示瞬时转速,这时的单位相应为孤度/秒。
转速的测量方法很多,由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。
霍尔开关传感器正由于其体积小,无触点,动态特性好,使用寿命长等特点,故在测量转动物体旋转速度领域得到了广泛应用。
霍尔器件是由半导体材料制成的一种薄片,在垂直于平面方向上施加外磁场B,在沿平面方向两端加外电场,则使电子在磁场中运动,结果在器件的两个侧面之间产生霍尔电势。
其大小和外磁场及电流大小成比例。
本实验选用美国史普拉格公司(SPRAGUE)生产的3000系列霍尔开关传感器3020,它是一种硅单片集成电路,器件的内部含有稳压电路、霍尔电势发生器、放大器、史密特触发器和集电极开路输出电路,具有工作电压范围宽、可靠性高、外电路简单、输出电平可与各种数字电路兼容等特点。
器件采用三端平塑封装。
引出端功能符号如下:引出端序号 1 2 3功能电源地输出符号 VC1 GND OUT我们根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘附近安装一个霍尔器件3020,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比,测出脉冲的周期或频率即可计算出转速。
直流电机的转速与施加于电机两端的电压大小有关。
本实验用DAC0832控制输出到直流电机的电压,控制DAC0832的模拟输出信号量来控制电机的转速。
直流电机转速测控实验

直流电机转速测控实验一、实验目的1. 掌握电机转速的测量原理;学会根据被测环境、对象不同选择合适的传感器测量转速;2. 掌握电机转速控制的原理;学会用计算机和传感器组成转速测控系统。
二、实验原理图1所示为计算机直流电机转速测控系统原理图。
图1 计算机测控直流电机转速原理框图根据被测环境和对象选择不同转速传感器(光电、霍尔、磁电)实现直流电机转速的测量及控制。
三. 实验仪器和设备1. CSY-5000型传感器测控技术实训公共平台;2. 环形带综合测控实验台;3. 数据采集模板及测控软件(LabVIEW试用版);4. 12V直流电机调节驱动挂箱;5. 光电式、霍尔式、磁电式转速传感器各一件;6. PC机及RS232通讯接口。
四.实验预习要求1.查阅资料,了解旋转轴转速测量的常用方法;2.掌握采用光电式、霍尔式、磁电式传感器测量转速的原理及特点;3.理解计算机测控直流电机转速的系统工作原理;4.熟悉CSY-5000型传感器测控技术实训平台的硬件配置。
五. 实验步骤及内容第一部分:转速测量1、在关闭公共平台主机箱电源开关的前提下,连接数据采集模板电源线、RS232通讯线;2、根据你选用的转速传感器,按转速传感器附录图1、图2、图3示意图安装接线;(注意光电、霍尔传感器为+5V供电,磁电传感器为+15V供电)3、主机箱上0~12V可调电源与电压表(电压表量程选择20V档)及环形带综合测控实验台电机(环形带综合测控实验台背面)接口并接(注意接口的相应极性);4、检查接线无误后,首先将主机箱上0~12V可调旋钮逆时针方向缓慢调节到底(起始输出电压最小);然后桌面“环形带综合测试软件”(或者启动计算机中的测试软件目录“SensorTest.vi”),双击打开,显示图2环形带综合测试程序软件界面;再打开主机箱电源开关给测量系统供电。
图2 环形带综合测试软件界面5、在计算机的环形带综合测试程序软件界面采单栏下方栏点击运行按钮,串口通讯正常后选择测试软件中“手动转速控制与测量”选项,软件界面显示为图3转速测量选择传感器类型界面;在界面下方选择“传感器类型”为现在做测量转速实验相对应的转速传感器。
自动控制直流电机测速反馈控制实验
目录一、实验目的 (1)二、实验器材 (1)三、实验对象介绍 (1)四、实验思路 (1)五、实验过程 (2)六、实验结果 (7)七、出现问题及解决方案 (8)八、总结 (9)直流电动机转速控制实验一、实验目的1.掌握控制系统的结构框架和基本环节对系统的影响或作用2.建立数学建模的思想,学会用建模思想解决控制系统问题3.通过设计的测速闭环反馈控制系统让直流电动机达到理想和稳定的转速二、实验器材直流电动机、电路实验箱、电动机驱动模块、电源模块、导线若干三、实验对象介绍被控对象:电动机被控量:电动机的转速四、实验思路1、首先通过实验测定直流电动机转速模型的传递系数K 、时间常数T,以获得电机转速的传递函数1)(+=ΦTs K s 。
2.然后对未校正的直流电机转速控制系统建立数学模型。
3.最后添加校正环节到控制系统,使电机转速达到预定转速 电路直流电机控制系统模拟五、实验过程1.接线(1)电机:粗线(红、黑端)接输入驱动模块的out+和out-,细线(红、黑端)接测速反馈;(2)电源模块:输出端v+、com(提供24V电压)分别接电动机驱动模块的电源输入端BAT+、GND;(3)电动机驱动模块:S1端接地,S2端接控制信号;out+和out-为控制信号输出;EN、COM两端短接,控制其工作使能;(注:若输出信号为负,短接DIR和COM)。
2.获取电机转速的传递函数(1)电动机的传递函数为一阶系统,给控制系统加一个单位阶跃输入,测其输出响应。
但输出仿真波形中出现了大量高次噪声,所以需串联一个滤波环节。
(2)一阶积分环节具有滤除高频噪声的能力,同样二阶惯性环节也能滤除高频噪声,由于二阶惯性环节电路图比较复杂,所以选用一阶积分环节。
一阶环节的电路原理图如下:(3)加入滤波环节后再对其加单位阶跃输入,测得其输出响应波形为通过测试得到k=1.04,t=0.296,所以电机转速的传递函数为 1296.004.1)(+=Φs s 。
直流电机调速部分实验说明
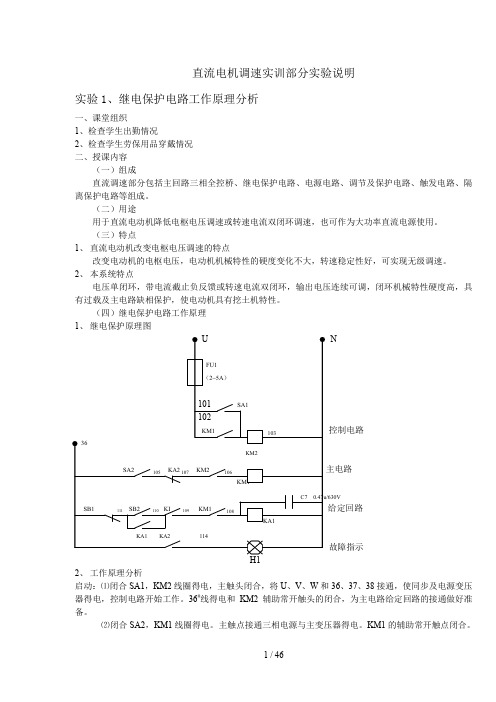
直流电机调速实训部分实验说明实验1、继电保护电路工作原理分析一、课堂组织1、检查学生出勤情况2、检查学生劳保用品穿戴情况二、授课内容(一)组成直流调速部分包括主回路三相全控桥、继电保护电路、电源电路、调节及保护电路、触发电路、隔离保护电路等组成。
(二)用途用于直流电动机降低电枢电压调速或转速电流双闭环调速,也可作为大功率直流电源使用。
(三)特点1、直流电动机改变电枢电压调速的特点改变电动机的电枢电压,电动机机械特性的硬度变化不大,转速稳定性好,可实现无级调速。
2、本系统特点电压单闭环,带电流截止负反馈或转速电流双闭环,输出电压连续可调,闭环机械特性硬度高,具有过载及主电路缺相保护,使电动机具有挖土机特性。
(四)继电保护电路工作原理1、继电保护原理图N控制电路给定回路故障指示H12、工作原理分析启动:⑴闭合SA1,KM2线圈得电,主触头闭合,将U、V、W和36、37、38接通,使同步及电源变压器得电,控制电路开始工作。
36#线得电和KM2辅助常开触头的闭合,为主电路给定回路的接通做好准备。
⑵闭合SA2,KM1线圈得电。
主触点接通三相电源与主变压器得电。
KM1的辅助常开触点闭合。
1 / 46①使控制电路接触器KM2线圈始终接通,保证主电路得电时,控制电路不能被切断。
②为给定回路的接通做好准备。
⑶按下SB2,给定回路接通,KA1得电自锁,进行完⑴、⑵、⑶后,启动完成。
停止:⑴按下SB1,切断给定回路。
⑵断开SA2,切断主电路。
⑶断开SA1,切断控制电路。
3、给定回路原理图(+15v)(-15v)KA11闭合后,+15v接通,KA11线圈不得电时,-15v接通。
(五)在继电保护电路中的一些问题1、与SA1并联的KM1辅助常开触点的作用是什么?当KM2得电后,KM1才能得电。
依靠KM1线圈前的KM2常开完成顺序控制。
但一旦KM1闭合后,KM2将无法断开,是由并联在SA1上的KM1触头实现的,其作用是保证控制电路得电后,主电路才能得电,而主电路没有断电时,控制电路不能断电,主电路得电而控制电路不工作,容易出现事故。
4直流电机测速实验(微机原理)
本科实验报告课程名称:微机原理及接口技术实验项目:直流电机测速实验实验地点:微机原理实验室专业班级:电信1001 学号:2010001207 学生姓名:吴清涛指导教师:任光龙2013年6 月5 日一、实验目的(1)掌握8254的工作原理和编程方法;(2)了解光电开关,掌握用光电传感器测量电机转速的方法。
二、实验内容光电测速的基本电路由光电传感器、计数器/定时器组成。
被测电机主轴上固定一个圆盘,圆盘的边缘上有小孔。
传感器的红外发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外光通过,接收管导通,输出低电平。
红外光被挡住时,接收截止,输出高电平。
用计数器/定时器记录在一定时间内传感器发出的脉冲个数,就可以计算出电机的转速。
三、线路连接(1)线路连接如图4.6所示。
8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0引脚输入1MHz脉冲,输出OUT0引脚作为定时器2的输入,与CLK2引脚相连,输出引脚OUT2与8255的PA0端相连。
GATE0和GATE2均接+5V电源。
8254计数器/定时器1作为计数器,输入引脚CLK1与直流电机计数端连接,GATE1与8255的PC0相连。
电机DJ端与+5V~0V模拟开关SW1相连。
(2)8254计数器/定时器1作为计数器,记录脉冲个数,计数器/定时器0和2作为定时器,组成10~60秒定时器,测量脉冲个数,以此计算出电机每份钟的转速,并显示在计算机屏幕上。
8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。
四、流程图DA TA SEGMENT ;数据段 IOPORT EQU 0D880H-0280H ;8255端口基地址 IO8255K EQU IOPORT+283H ;8255控制口地址 IO8255A EQU IOPORT+280H ;8255 A 口地址 IO8255C EQU IOPORT+282H ;8255 C 口地址 IO8254K EQU IOPORT+28BH ;8254控制口地址 IO82542 EQU IOPORT+28AH ;8254计数器2端口地址 IO82541 EQU IOPORT+289H ;8254计数器1端口地址 IO82540 EQU IOPORT+288H ;8254计数器0端口地址MESS DB 'STRIKE ANY KEY ,RETURN TO DOS!',0AH ,0DH ,'$' ;提示信息 COU DB 0 ;预留单元并清零 COU1 DB 0 COUNT1DB 0 COUNT2 DB 0COUNT3 DB 0COUNT4 DB 0DA TA ENDSCODE SEGMENT ;代码段ASSUME CS:CODE,DS:DA T AST ART:MOV AX,DA T A ;初始化,取段基址MOV DS,AXMOV DX,OFFSET MESS ;MESS首地址MOV AH,09H ;DOS 9号调用,INT 21H ;显示提示信息MOV DX,IO8254K ;DX←8254控制口地址MOV AL,36H ;AL=36H , 控制字OUT DX,AL ;设置计数器0,方式3,先读写低8位,再读写高8位MOV DX,IO82540 ;DX←8254计数器0端口地址MOV AX,50000 ;初始值为50000,输入时钟为1MHz,则输出时钟周期50msOUT DX,AL ;输出低8位NOP ;空操作NOPMOV AL,AH ;AL←AHOUT DX,AL ;输出高8位MOV DX,IO8255K ;DX←8255控制口地址MOV AL,90H, ;AL=90H,控制字OUT DX,AL ;A口方式0输入,PA0输入;C口方式0输出,PC0输出MOV DX,IO8255C ;DX←8255 端口C口地址,MOV AL,00 ;AL=0OUT DX,AL ;PC0=0,则GA TE1为低电平,定时器1禁止计数LL:MOV AH,01H ;DOS 1号调用,判断是否有键按下?INT 16HJNZ QUIT1 ;ZF=0,有键按下,转到标号QUIT1MOV DX,IO8254K ;DX←8254控制口地址MOV AL,70H ;AL=70H,控制字OUT DX,AL ;设置计数器1,方式0,先读写低8位,再读写高8位MOV DX,IO82541 ;DX←8254计数器1地址MOV AL,0FFH ;定时常数,实际为FFFFHOUT DX,AL ;输出低8位NOP ;空操作NOPOUT DX,AL ;输出高8位,开始计数MOV DX,IO8254K ;DX←8254控制口地址MOV AL,90H ;AL=90H,控制字OUT DX,AL ;计数器2,方式0,只读写低8位MOV DX,IO82542 ;DX←8254计数器2地址MOV AL,100 ;AL=100,定时常数OUT DX,AL ;CLK2=50ms,定时常数为100,则OUT2定时时间即检测时间为5秒MOV DX,IO8255C ;DX←8255端口C地址MOV AL,01H ;AL=01HOUT DX,AL ;PC0输出1,即为高电平,定时器1开始计数JMP A0 ;无条件转移到标号A0QUIT1:JMP QUIT ;无条件转移到标号QUITA0:MOV DX,IO8255A ;DX←8255端口A地址A1:IN AL,DX ;读入PA0的值,进行检测AND AL,01H ;判断PA0是否为高电平1?JZ A1 ;ZF=1,即PA0=0,为低电平,转到标号A1,继续检测MOV DX,IO8255C ;ZF=0,即PA0=1,为高电平,定时器2定时5秒结束OUT2输出高电平MOV AL,00H ;AL=00HOUT DX,AL ;8255端口C输出0,定时器1停止计数MOV DX,IO8254K ;DX←8254控制口地址MOV AL,70H ;AL=70HOUT DX,AL ;设置计数器1,方式0,先读写低8位,再读写高8位MOV DX,IO82541 ;DX←8254计数器1地址IN AL,DX ;读入计数器1的内容MOV BL,AL ;BL←AL先读入低8位IN AL,DX ;读入计数器1的内容MOV BH,AL ;BH←AL后读高8位,16位计数值送BXMOV AX,0FFFFH ;AX=FFFFHSUB AX,BX ;AX-BX=计算脉冲个数CALL DISP ;调显示子程序MOV DL,0DH ;DL=0DH,“回车”的ASCII码MOV AH,02 ;DOS 2号调用INT 21HMOV DL,0AH ;DL=0AH,“换行”的ASCII码MOV AH,02 ;DOS 2号调用INT 21HJMP LL ;无条件转到标号LL ,继续检测DISP PROC NEAR ;十六进制数→BCD转换并显示子程序MOV DX,0000H ;DX=0MOV CX,03E8H ;CX=03E8H=1000DIV CX ;AX←DX ,AX÷1000商,DX←DX ,AX÷1000余数MOV COUNT1,AL ;COUNT1←AL,千位MOV AX,DX ;AX←DX余数MOV CL,64H ;CL=64H=100DIV CL ;AL←AX÷100商,AH←AX÷100余数MOV COUNT2,AL ;COUNT2←AL,百位MOV AL,AH ;AL←AH余数MOV AH,00H ;AH=0MOV CL,10 ;CL=10DIV CL ;AL←AX÷10商,AH←AX÷10余数MOV COUNT3,AL ;COUNT3←AL,十位MOV COUNT4,AH ;COUNT4←AL,个位MOV AL,COUNT1 ;AL← COUNT1CALL DISP1 ;调显示字符子程序MOV AL,COUNT2CALL DISP1MOV AL,COUNT3CALL DISP1MOV AL,COUNT4CALL DISP1RETDISP ENDPDISP1 PROC NEAR ;显示字符子程序AND AL,0FH ;“与”操作,屏蔽高4位,保留低4位CMP AL,09H ;AL与9比较JLE NUM ;AL≤9,转到标号NUMADD AL,07H ;DL>9,DL←DL+7NUM:ADD AL,30H ;AL←AL+30H,转换成ASCII码MOV DL,AL ;DL←ALMOV AH,02 ;DOS 2号调用INT 21H ;显示一个字符RETDISP1 ENDPQUIT:MOV AH,4CH ;返回DOSINT 21HCODE ENDSEND ST ART ;结束六、实验结果七、思考题(1)关闭电机后,为什么8254计数不为零?答:关闭电机后,由于计数值已经存储在锁存器中,所以只有到锁存器中的值为零时,才计数为零。
微机原理 无刷直流风扇调速与测速
████工学院微机原理(3级)项目报告项目名称:微机原理课程设计项目题目:无刷直流风扇调速与测速指导教师:███系别:机电系专业:机械设计制造及其自动化组员信息学号:姓名:王██组员信息学号:姓名:郭██完成时间: 2014 年 12 月 01 日至 2016 年 1 月 3 日成绩:评阅人:目录一、学习目标 (1)二、项目要求 (1)三、转速测量和调节系统的硬件构成 (1)四、程序流程图并说明方案思路 (3)五、风扇转速与占空比之间的关系表格和曲线 (4)六、设计程序 (5)七、分析设计过程出现的问题 (12)八、方案总结 (13)一、学习目标本次系统作业的目的在于:①通过脉冲宽度调节实现无刷直流风扇转速的改变;②借助风扇转动时产生的脉冲信号,测量风扇的转速并显示;③比较每组风扇从某一转速(600r/min)到另一转速(2000r/min)稳定运转的所需要的时间。
通过比较试验结果的估算结果并讨论结果差异的主要原因,让学生展示对无刷直流风扇数学模型建立和调节方法局限性有深入理解。
二、项目要求检查项目要求转速显示风扇转速能够显示在LED上,转速单位是r/min,刷新周期为1秒钟左右风扇转速可调风扇转速可以改变,根据要求转速在700-1400r/min风扇转速与显示通过简单方法给风扇加负载,随着转速的下降应该看到转速变化的显示转速指令输入环节通过串口或键盘输入给定转速给定某一转速,1200-1500之间,看显示转速的稳定性转速调节功能在稳定转动条件下1500r/min,在30cm处加载一个外加一个风扇,对照加载前后的稳态转速回答问题随机提出有关转速测量、PWM输出和转速控制方面的问题,要有针对性,检查设计过程中的付出。
三、系统硬件构成风扇电路: 接线:黄线接Vcc ,黑线接地,绿线接P3^2,蓝线接P2^5。
输出:OC 输出,如下图四、画程序流程图并说明方案思路开始初始化中断产生PWM 波显示转速和占空比查询是否需要反馈调整查询是否收到串口数据查询风扇转速是否更新查询有无按键操作调整占空比更新目标转速刷新数码管缓存数据计算需要的占空比Y YYYNNNN程序主要用查询法判断需要执行的操作,并且利用中断处理函数来产生各种对应的标志位来通知主循环,在主循环中进行要求的运算。
课程设计实验报告-直流电机测速 (1)
直流电机测速摘要设计一种直流电机调速系统,以STC89C52 为控制核心,通过ULN2003 驱动电机,使用ST151 测量转速,实现了按键输入、电机驱动、转速控制、转速显示等功能。
关键词:直流电机, 80C51, ULN2003, 转速控制第一章题目描述直流小电机调速系统:采用单片机、ul n2003 为主要器件,设计直流电机调速系统,实现电机速度开环可调。
要求:1、电机速度分30r /m、60r /m、100r /m共3 档;2、通过按选择速度;3、检测并显示各档速度。
所需器件:实验板(中号)、直流电机、STC89C52、电容(30pFⅹ2、10uF ⅹ2)、数码管(共阳、四位一体)、晶振(12M H z )、小按键(4 个)、ST151、电阻、发光二极管等。
第二章方案论述按照题给要求,我们最终设计了如下的解决方案:用户通过键盘键入控制指令(开关),微控制器在收到指令后改变输出的 PW M波,最终在 U LN2003 的驱动下电机转速发生改变。
通过 ST151 传感器测量电机扇叶的旋转情况,将转速显示在数码管上。
在程序主循环中实现按键扫描与转速显示,将定时器0 作为计数器,计数ST151 产生的下降沿,可算出转速,并送至数码管显示。
第三章硬件部分设计系统硬件部分包含输入模块、显示模块、控制模块、测速模块等。
在硬件搭建前,先通过Pr ot eus Pr o 7. 5 进行硬件仿真实现。
1. 时钟电路系统采用12M 晶振与两个30pF 电容组成震荡电路,接STC89C52 的 XTAL1 与 XTAL2 引脚,为微控制器提供时钟源2. 按键电路四个按键分别控制电机的不同转速,即控制 PW M波高电平的占空比,以实现电机的速度控制,采用开环控制方法,不是十分精确,但控制简单,易实现,代码编写简单3. 显示部分系统采用4 位共阴极数码管实现转速显示。
数码管的位选端1~4 分别接STC89C52 的P2. 0~P2. 3 管脚,端选段A~G与 D P分别接 STC89C52 的 P0. 0~P0. 7 管脚。
直流电机测速控制总结
直流电机测速控制总结一.测速原理霍尔开关对垂直于器件且磁通密度达到其动作点Bopn或Bops以上,会使器件开关导通输出为低,此时器件可以吸收1mA的电流。
只要磁通密度降低到释放点Brpn或Brps以下,会使器件开关断开输出为高。
磁通密度动作点和释放点的差异称为器件的磁滞。
该磁滞特性可保证即使出现外部振动和电气噪声,器件的开关过程均无抖动。
利用霍尔开关输出电压与磁通密度的这种这种关系特性,在直流电机的转动轴上套上一个塑料齿轮,在轮子的一条直径上对称的放有两块相同的小磁铁块。
(如右图)将霍尔开关放置在齿轮下放合适处,使齿轮转动一周,霍尔开关就受到两次磁激励而产生两个脉冲。
霍尔开关将脉冲输入与P10(INT0)连接;每产生一个脉冲就进中断,对脉冲计数;到1秒将计数之值取出输出;同时将计数清零。
由此完成对直流电机的转速测定。
二.控制原理采用INT0 中断对转速脉冲CKMOT 计数,每1s 读一次计数值,将此值与预设的转速值比较,若大于预设的转速值则减小DAC0 的数值;若小于转速预设的转速值则增加DAC0 的值来调整直流电机的输入电压达到调整电机的转速直到转速值等于预设定的值。
由于D/A的输出电压范围有限,所以只能测出3转/s---54转/s; 为达到电机控制的稳定,可采用差动输入方法和PDI算法来实现。
本试验采用差动模式,下面是控制程序的部分段;sfr16 DAC0 = 0xd2; 设定DAC0的数据寄存器地址unsigned int iDAC0=2048; 设定变量用以初始化DAC0的数据寄存器void Timer0_ISR (void) interrupt 1 每到1秒进入中断{TH0 = (-SYSCLK/1000) >> 8;TL0 = -SYSCLK/1000;if (Count1ms) Count1ms--;if (Count1s) Count1s--;else 到1秒时开始取值{Count1s=1000;SaveMotorCount=MotorCount;把1秒内得到的脉冲数取出MotorCount=0; 重新记脉冲数SD=SaveMotorCount/2-SetSpeed; 将当前转速与设定值比较得到差动量if (SD){if ((SD>2)||(SD<-2))iDAC0-=SD;elseiDAC0-=SD; 改变D/A寄存器值以改变直流电机电压DAC0=iDAC0;}}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四直流电机测速实验
一、实验目的:
(1)掌握8254的工作原理和编程方法;
(2)了解光电开关,掌握用光电传感测量电机转速的方法。
二、实验内容:
光电测速的基本电路由光电传感器,计数器/定时器组成。
被测电机主轴上
固定一个圆盘,圆盘的边缘上有小孔。
传感器的红外发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外光通过,接收管导通,输出低电平。
红外光被挡住时,接收截止,输出高电平。
用计数器/定时器记录在一定时间内
传感器发出的脉冲个数,就可以计算出电机的转速。
三、线路连接:
线路连接如图4.5所示,8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0连1MHZ脉冲频率,OUT0作为定时器2的输入,与CLK2 相连,输出OUT2与8255的PA0端相连。
GATE0和GATE2均接+5V,8254计数器/ 定时器1作为计数器,输入CLK1与直流电机计数关连接,GATE1与8255的PC0相连。
电机DJ端与+5V~0V模拟开关SW1相连。
四、编程提示:
8255计数器/定时器1作为计数器,记录脉冲个数,计数器/定时器0和2
作为定时器,组成10~60秒定时器,测量脉冲个数,算出电机每分钟的转速并显示在屏幕上。
8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。
五、流程图
如图4.6所示
图 4.6直流电机测速程序流程图
六,编写源程序如下:
DATASEGMENT
IOPORTEQU0D880H-0280H
IO8255KEQUIOPORT+283H;8255控制口
IO8255AEQUIOPORT+280H;8255A口
IO8255CEQUIOPORT+282H;8255C口
IO8254KEQUIOPORT+28BH;8254控制
IO82542EQUIOPORT+28AH;8254计数器2
IO82541EQUIOPORT+289H;8254计数器1
IO82540EQUIOPORT+288H;8254计数器0
MESSDB'STRIKEANYKEY,RETURNTODOS!',0AH,0DH,'$'
COUDB0
COU1DB0
COUNT1DB0
COUNT2DB0
COUNT3DB0
COUNT4DB0
DATAENDS
CODESEGMENT
ASSUMECS:CODE,DS:DATA
START:MOVAX,DATA
MOVDS,AX
MOVDX,OFFSETMESS
MOVAH,09H
INT21H;显示提示信息
MOVDX,IO8254K
MOVAL,36H;计数器0,方式3,先读写低8位,再读写高8位
OUTDX,AL;输入时钟,1MHZ
MOVDX,IO82540
MOVAX,50000;初值50000,输出时钟周期50MS
OUTDX,AL
NOP
NOP
MOVAL,AH
OUTDX,AL
MOVDX,IO8255K;8255,PA0通道输入,PC0输出
MOVAL,90H
OUTDX,AL
MOVDX,IO8255C
MOVAL,00
OUTDX,AL;PC0低电平,定时器1禁止计数
LL:MOVAH,01H;有无键入
INT16H
JNZQUIT1;有键入,返回
MOVDX,IO8254K
MOVAL,70H
OUTDX,AL;计数器1,方式0,先读写低8位,再读写高8位MOVDX,IO82541;输入时钟为光电开关输出
MOVAL,0FFH
OUTDX,AL
NOP
NOP
OUTDX,AL
MOVDX,IO8254K
MOVAL,90H
OUTDX,AL;计数器2,方式0,只读写低8位
MOVDX,IO82542
MOVAL,100
OUTDX,AL;初值100,检测5s
MOVDX,IO8255C
MOVAL,01H
OUTDX,AL;PC0输出1,定时器1开始计数
JMPA0
QUIT1:JMPQUIT
A0:MOVDX,IO8255A
A1:INAL,DX
ANDAL,01H
JZA1
MOVDX,IO8255C
MOVAL,00H
OUTDX,AL
MOVDX,IO8254K
MOVDX,70H
OUTDX,AL
MOVDX,IO82541
INAL,DX
MOVBL,AL
INAL,DX
MOVBH,AL
MOVAX,0FFFFH
SUBAX,BX
CALLDISP
MOVDL,0DH
MOVAH,02
INT21H
MOVDL,0AH
MOVAH,02
INT21H
JMPLL
DISPPROCNEAR
MOVDX,0000H
MOVCX,03E8H
DIVCX
MOVCOUNT1,AL
MOVAX,DX
MOVCL,64H
DIVCL
MOVCOUNT2,AL
MOVAL,AH
MOVAH,00H
MOVCL,10
DIVCL
MOVCOUNT3,AL
MOVCOUNT4,AH
MOVAL,COUNT1
CALLDISP1
MOVAL,COUNT2
CALLDISP1
MOVAL,COUNT3
CALLDISP1
MOVAL,COUNT4
CALLDISP1
RET
DISPENDP
DISP1PROCNEAR
ANDAL,0FH
CMPAL,09H
JLENUM
ADDAL,07H
NUM:ADDAL,30H
MOVDL,AL
MOVAH,02
INT21H
RET
DISP1ENDP
QUIT:MOVAH,4CH
INT21H
CODEEND
ENDSTART
将以上源程序编写后保存为“ZF1.ASM”文件
七、实验结果:
八、
九、
①连接实验箱上电线时,为防止损坏实验箱电路板,应先关闭电脑和实验箱电
源,接下来才能按实验电路图1连接好电线,随后才能打开电脑进行接下来的操作。
②对源文件“ZF1.ASM”,用“ML”命令进行汇编链接,生成可执行文件“ZF1.EXE”。
③打开扩展卡I/O端口地址,用ALLOWIO命令打开I/O端口地址:
直接输入“RUN”,回车
④随后,给实验箱通电,并执行可执行文件“ZF1.EXE”,调节直流电路旋钮可
改变电机转速,即可看到屏幕上显示的一系列电机的速度。
八、思考题:
关闭电机后为什么8254计数不为零?
答:由于之前计数值即电机转速已经存储在锁存器中,关闭电机后,程序还是将
之前的数值显示在屏幕上,所以不为零。