整车坐标系的转换步骤
gps坐标转换常用方法及转换流程

GPS坐标转换常用方法及转换流程GPS(全球定位系统)坐标转换是将地球上的位置坐标从一种表示方式转换为另一种方式的过程。
这种转换是非常常见的,特别是在地图应用、导航系统和地理信息系统中。
本文将介绍常用的GPS坐标转换方法并提供详细的转换流程。
背景知识在讨论GPS坐标转换之前,首先需要了解一些背景知识。
1. GPS坐标系统GPS坐标系统是用于在地球表面定位和导航的一种坐标系统。
它由经度、纬度和海拔高度组成。
经度表示位置在东西方向上的位置,纬度表示位置在南北方向上的位置,海拔高度表示位置相对于平均海平面的高度。
2. 常用的GPS坐标系统常见的GPS坐标系统包括WGS84和GCJ02坐标系统。
•WGS84坐标系统是一种全球通用的坐标系统,由GPS系统使用。
在大多数情况下,来自GPS设备的原始坐标将使用WGS84。
•GCJ02坐标系统是中国国家测绘局制定的一种坐标系统,用于在中国境内的地图应用中。
GCJ02坐标系统是基于WGS84进行了偏移处理,以保护国家安全。
常用的GPS坐标转换方法在进行GPS坐标转换时,常用的方法包括WGS84转GCJ02和GCJ02转WGS84。
1. WGS84转GCJ02WGS84转GCJ02是将WGS84坐标转换为GCJ02坐标的过程。
由于GCJ02坐标系统在WGS84的基础上进行了偏移处理,所以需要经过一些计算来进行转换。
转换的具体步骤如下:1.将WGS84坐标的经度和纬度分别记为lng和lat。
2.如果lat在1.5以外且lng在48.5以外,则直接返回WGS84坐标。
3.否则,计算新的坐标。
具体计算公式请参考相关的算法。
4.将计算得到的新坐标作为GCJ02坐标返回。
2. GCJ02转WGS84GCJ02转WGS84是将GCJ02坐标转换为WGS84坐标的过程。
由于GCJ02坐标系统相对于WGS84进行了偏移处理,所以需要进行逆运算才能得到原始的WGS84坐标。
转换的具体步骤如下:1.将GCJ02坐标的经度和纬度分别记为lng和lat。
坐标转换流程说明
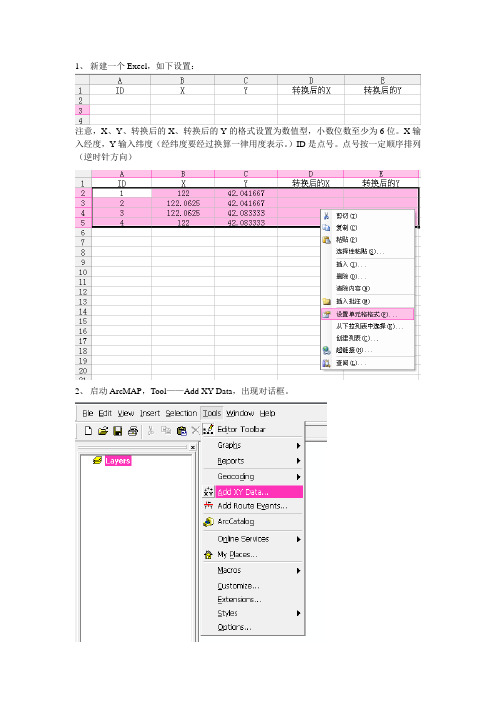
1、新建一个Execl,如下设置:注意,X、Y、转换后的X、转换后的Y的格式设置为数值型,小数位数至少为6位。
X输入经度,Y输入纬度(经纬度要经过换算一律用度表示。
)ID是点号。
点号按一定顺序排列(逆时针方向)2、启动ArcMAP,Tool——Add XY Data,出现对话框。
3、在对话框第一项里选择事先编辑好的Execl文件,观察X Filed和Y Filed 分别与Execl 里的X、Y对应。
4、点击“Edit”,选择“Select “,选择”Geographic Coordinate Systems “,——”Asia “。
根据图的左下角信息,判断是北京54还是西安80的坐标系,从而进行选择。
点击“确定“——”OK“——确定。
5、右击右面表格名称,选择“Label Feature “,点旁边注明点号,四个点就在绘图区站出来了。
6、点击右面工具条里的,双击点,可以查询点的准确坐标。
7、点击“View“里的”Data Frame Properties“,选择”Coordinate Systems“,选择”Predefined“里的”Projected Coordinate Systems “,再选择”Gauss Kruger“,根据图的左下角信息选择北京54或者西安80。
进入选项后,再根据图上格网横向坐标值前两位数字判断是40带还是41带(都是3度带),来进一步选择。
8、经过以上操作后,点的经纬度坐标已经转成以米为单位的坐标了。
利用查询工具,查出四个点的X、Y坐标,复制粘贴到第一步中建好的Execl中的“转换后的X、转换后的Y“里面,便于下一步在ERDAS中纠正。
自动驾驶中,utm坐标系转自车坐标系的方法

自动驾驶中,utm坐标系转自车坐标系的方法
在自动驾驶中,将UTM坐标系转换为自车坐标系的常用方法
是使用传感器数据进行坐标转换。
以下是一种常见的转换方法:
1. 首先,获取自车的当前位置和方向信息,通常可以通过
GPS和车辆惯性测量单元(IMU)来获取。
2. 获取自车当前位置的UTM坐标。
3. 使用UTM坐标系的原点作为参考点,计算自车当前位置相
对于原点的平移矢量。
4. 将平移矢量投影到车辆坐标系的X轴和Y轴上,得到相对
于车辆坐标系的平移矢量。
5. 获取自车当前方向的角度信息。
6. 将UTM坐标系的Y轴旋转到车辆坐标系的Y轴方向,并
计算旋转角度。
7. 将平移矢量和旋转角度应用到自车坐标系中,得到UTM坐
标系相对于自车坐标系的转换矩阵。
8. 使用转换矩阵将UTM坐标系中的目标点或障碍物位置转换
为自车坐标系中的位置。
这种方法可以根据车辆当前位置和方向的变化实时更新转换矩
阵,以实现准确的坐标转换。
注意,由于UTM与自车坐标系之间可能存在旋转和缩放的关系,因此在实际应用中可能需要校准和调整转换方法。
坐标转换方法范文

坐标转换方法范文坐标转换是指将一个坐标系上的点转换成另一个坐标系上的点的操作。
在地理信息系统(GIS)及其他相关领域中,坐标转换是非常重要的。
本文将详细介绍常见的二维坐标转换方法,包括平移、旋转、缩放和镜像。
1.平移:平移是将一个坐标系上的点沿一些方向按一定距离移动到新的位置。
平移操作可以用向量相加来表示。
设点A的坐标为(x1, y1) ,平移向量为(tx, ty),则点A'的坐标为(x1 + tx, y1 + ty)。
2.旋转:旋转是将一个坐标系上的点绕一些中心点按一定角度旋转。
旋转操作可以用矩阵运算来表示。
设点B的坐标为(x2, y2),旋转角度为θ,旋转中心为点C(cx, cy),则点B'的坐标为((x2 - cx) * cosθ - (y2 - cy) * sinθ + cx, (x2 - cx) * sinθ + (y2 - cy) * cosθ + cy)。
3.缩放:缩放是将一个坐标系上的点按照一定比例进行扩大或缩小。
缩放操作可以用矩阵运算来表示。
设点D的坐标为(x3, y3),在x轴和y轴上的缩放比例分别为sx和sy,则点D'的坐标为(x3 * sx, y3 * sy)。
4.镜像:镜像是将一个坐标系上的点相对于一些轴进行对称变换。
镜像操作可以用矩阵运算来表示。
设点E的坐标为(x4,y4),镜像轴为x轴,则点E'的坐标为(x4,-y4)。
以上是常见的二维坐标转换方法。
在实际应用中,我们常常需要综合使用多种方法进行坐标转换。
例如,当我们需要将一个点先平移,再旋转,最后进行缩放时,可以按照此顺序依次进行相应操作。
需要注意的是,不同的坐标系有不同的表示方法和计算规则。
因此,在进行坐标转换时,需要先了解两个坐标系的具体定义和规则,然后再选择合适的转换方法。
总之,坐标转换是GIS及其他相关领域中重要的一部分。
掌握多种坐标转换方法可以帮助我们更好地进行空间数据处理和分析。
坐标系转换步骤以及公式
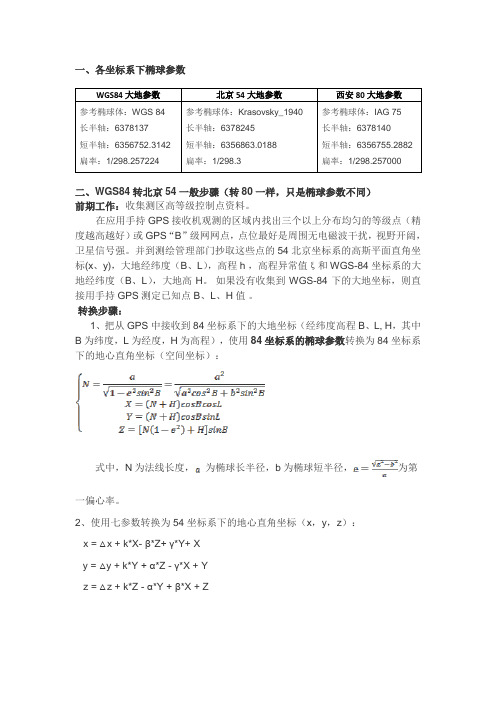
一、各坐标系下椭球参数WGS84大地参数北京54大地参数西安80大地参数参考椭球体:WGS 84 长半轴:6378137短半轴:6356752.3142 扁率:1/298.257224 参考椭球体:Krasovsky_1940长半轴:6378245短半轴:6356863.0188扁率:1/298.3参考椭球体:IAG 75长半轴:6378140短半轴:6356755.2882扁率:1/298.257000二、WGS84转北京54一般步骤(转80一样,只是椭球参数不同)前期工作:收集测区高等级控制点资料。
在应用手持GPS接收机观测的区域内找出三个以上分布均匀的等级点(精度越高越好)或GPS“B”级网网点,点位最好是周围无电磁波干扰,视野开阔,卫星信号强。
并到测绘管理部门抄取这些点的54北京坐标系的高斯平面直角坐标(x、y),大地经纬度(B、L),高程h ,高程异常值ξ和WGS-84坐标系的大地经纬度(B、L),大地高H。
如果没有收集到WGS-84下的大地坐标,则直接用手持GPS测定已知点B、L、H值。
转换步骤:1、把从GPS中接收到84坐标系下的大地坐标(经纬度高程B、L, H,其中B为纬度,L为经度,H为高程),使用84坐标系的椭球参数转换为84坐标系下的地心直角坐标(空间坐标):式中,N为法线长度,为椭球长半径,b为椭球短半径,为第一偏心率。
2、使用七参数转换为54坐标系下的地心直角坐标(x,y,z):x = △x + k*X- β*Z+ γ*Y+ Xy = △y + k*Y + α*Z - γ*X + Yz = △z + k*Z - α*Y + β*X + Z其中,△x,△y,△z为三个坐标方向的平移参数;α,β,γ为三个方向的旋转角参数;k为尺度参数。
(采用收集到的控制点计算转换参数,并需要验证参数)在小范围内可使用七参数的特殊形式即三参数,即k、α、β、γ都等于0,变成:x = △x+ Xy = △y+ Yz = △z + Z3、根据54下的椭球参数,将第二步得到的地心坐标转换为大地坐标(B54,L54,H54)计算B时要采用迭代,推荐迭代算法为:4、根据工程需要以及各种投影(如高斯克吕格)规则进行投影得到对应的投影坐标,即平面直角坐标。
测绘技术中常见的坐标系统及其转换方法
测绘技术中常见的坐标系统及其转换方法导语:测绘技术是以获取、处理、分析地理空间数据为基础的专业领域,而坐标系统则是测绘技术中的重要概念。
本文将介绍测绘技术中常见的坐标系统及其转换方法,以帮助读者更好地理解和应用测绘技术。
1. 地理坐标系统地理坐标系统是测绘技术中最常见的坐标系统之一。
它使用经度和纬度来描述地球上的位置。
经度表示地球表面上一个点位于东西方向上的角度,纬度表示位于南北方向上的角度。
这种坐标系统常用于地图制作、导航等领域。
2. 平面坐标系统平面坐标系统是测绘技术中另一种常见的坐标系统。
它将地球表面分为各种局部平面,在每个局部平面上使用平面坐标来描述位置。
不同的平面坐标系统有不同的坐标原点和坐标轴方向,但都以米为单位。
这种坐标系统常用于城市规划、土地管理等领域。
3. UTM坐标系统UTM坐标系统(通用横轴墨卡托投影坐标系统)是一种常用的平面坐标系统。
它将地球表面划分为60个横向带和20个纵向带,每个带的中央子午线用作坐标原点。
该坐标系统使用东北方向的坐标来描述位置,其中东方向的坐标称为Easting,北方向的坐标称为Northing。
UTM坐标系统广泛应用于测绘工程、导航和地理信息系统等领域。
4. 地方坐标系统地方坐标系统是一种根据具体地方特性而设定的坐标系统,在特定地区使用。
不同地方坐标系统可能使用不同的投影方法和坐标单位。
例如,中国在大范围地图制作和测绘工程中使用的是高斯-克吕格投影坐标系统,以保证地图坐标的准确性。
地方坐标系统在局部区域的测绘和工程项目中具有重要作用。
5. 坐标系统转换方法坐标系统转换是测绘技术中常见且必要的操作。
由于不同坐标系统使用不同的参考标准和投影方法,经纬度与平面坐标之间的转换需借助转换方法。
常见的坐标系统转换方法包括大地坐标系向平面坐标系的转换、不同平面坐标系之间的转换等。
大地坐标系向平面坐标系的转换通常需要根据椭球体参数进行计算。
这种转换方法常用于将GPS采集的经纬度坐标转换为所需的平面坐标。
坐标系转换和基准面处理的技术方法
坐标系转换和基准面处理的技术方法在地理信息系统(GIS)和测量领域,坐标系转换和基准面处理是非常重要的技术方法。
这些方法涉及将不同坐标系之间的地理位置进行转换,并将测量数据配准到一个统一的基准面上。
本文将介绍坐标系转换和基准面处理的一些常见技术方法。
一、坐标系转换1. 参数法参数法是一种常见的坐标系转换方法。
它通过建立两个坐标系之间的数学映射关系,将一个坐标系中的坐标转换为另一个坐标系中的坐标。
这需要知道两个坐标系之间的转换参数,例如平移、旋转和缩放等。
常见的参数法坐标系转换方法有七参数法、四参数法和三参数法。
2. 插值法插值法是另一种常见的坐标系转换方法。
它通过在已知坐标点上进行插值,推导出其他位置的坐标。
插值法常用于无法获得精确转换参数的情况下,例如地形变形或大范围地理测量。
3. 数学模型法数学模型法是一种更复杂的坐标系转换方法,它使用数学模型描述坐标系之间的变换关系。
这些数学模型通常基于地球椭球体形状和旋转参数,并涉及到大量的复杂计算。
数学模型法通常用于高精度测量或大范围区域的坐标转换。
二、基准面处理基准面处理是将测量数据从一个基准面转换到另一个基准面的过程。
这是因为地球的形状和地球引力场的不均匀性导致不同地区的基准面存在差异。
基准面处理的常见技术方法包括以下几种。
1. 大地水准面处理大地水准面是指所有点的高程都被定义为基准面上的高程。
然而,由于地球形状的复杂性,大地水准面通常是曲面而非平面。
通过利用测量数据,使用数学模型和插值方法,可以将数据转换到统一的大地水准面上。
2. 椭球面处理地球的形状通常被近似为一个椭球体。
椭球面处理是将数据从现实世界的三维空间转换为椭球面上的二维坐标的过程。
这可以通过使用地理坐标系和数学椭球体模型来实现。
3. 高程转换高程转换是将一个基准面上的高程转换为另一个基准面上的高程的过程。
这需要使用大地水准面和椭球面处理的方法,以及考虑到基准面差异带来的高程变化。
总结综上所述,坐标系转换和基准面处理是地理信息系统和测量领域中的重要技术方法。
零部件转化为整车坐标系

零部件坐标系转变为整车坐标系
1、在CATIA中建立一个20*20的正方体
起下部红线边处做出一个球形切割,半径R=4,作为坐标系的指示,该零部件的坐标系即CATIA中的默认世界坐标系。
2、另外建立一个球体,半径R=4,其球心与CATIA中的世界坐
标系中心重合
3、建立好的球模型
4、建立一个PRODUCT文件,并将立方体模型直接装配进去可
以发现,若不对其进行移动操作,立方体的默认世界坐标系与PRODUCT的坐标系是重合的。
5、直接调入球体,默认放置位置为坐标系重合状态
6、建立约束,使二者正确装配,更新。
可以看到,球体的世界
坐标系位置与PRODUCT的世界坐标系不重合
7、在PRODUCT中新建立一个零部件
零部件的坐标系原点定义为装配体原点,即选择“否”
8、可以发现,新建立的零部件的坐标系的位置和装配体的世界
坐标系是重合的
9、激活(或不激活)球体零部件的“PART”按钮,以便可以选择
其中的零部件几何体来进行复制
10、再激活刚才新建立的在组建坐标系下的零部件的“PART”,
并在其“零部件几何体”处单击鼠标右键,选择“特殊粘贴”
11、选择“作为结果”来进行粘贴
12、隐藏原来的球体文件,并选中在
新建立的零部件中的粘贴的“几
何体”及其坐标系,可以发现,
现在这个零件中,不仅球体处在
正确的装配位置,且其零部件的
坐标系与组件的坐标系重合,也
即,若直接在PRODUCT中载入
新建之PART1文件,其可自动放
置在正确的位置上。