空间直角坐标系坐标转换方法
空间直角坐标系转换参数计算
空间直角坐标系转换参数计算欧拉角是一种常用的坐标系转换方法,它使用三个角度来描述一个坐标系相对于另一个坐标系的旋转关系。
常用的欧拉角表示方法有绕X轴旋转的俯仰角(pitch)、绕Y轴旋转的偏航角(yaw)和绕Z轴旋转的滚转角(roll)。
通过测量两个坐标系之间的角度差,可以计算出坐标系转换的参数。
四元数是一种更高效的坐标系转换方法,它使用四个实数来表示旋转关系。
四元数具有单位长度的性质,可以通过旋转角度和旋转轴来计算出四元数的分量。
使用四元数进行坐标系转换时,只需要进行简单的乘法和加法运算,可以大大降低计算复杂度。
转移矩阵是一种用矩阵表示的坐标系转换方法,它将一个坐标系转换为另一个坐标系的过程表示为一个变换矩阵。
转移矩阵是一个4x4的矩阵,其中前三行前三列表示旋转矩阵,最后一行前三列表示平移矩阵。
通过相乘运算,可以将一个坐标系的点转换到另一个坐标系中。
计算空间直角坐标系转换参数的方法主要包括以下几个步骤:1.确定参考坐标系和目标坐标系。
在进行坐标系转换之前,需要确定参考坐标系和目标坐标系。
参考坐标系是已知的坐标系,目标坐标系是需要计算的坐标系。
2.测量两个坐标系之间的旋转关系。
通过测量两个坐标系之间的角度关系,可以计算出旋转关系。
在欧拉角法中,可以通过测量俯仰角、偏航角和滚转角来计算旋转关系;在四元数法中,可以通过测量旋转角度和旋转轴来计算旋转关系。
3.计算坐标系转换参数。
根据测量得到的旋转关系,可以计算出坐标系转换的参数。
在欧拉角法中,坐标系转换参数为三个角度;在四元数法中,坐标系转换参数为四个实数;在转移矩阵法中,坐标系转换参数为一个4x4的矩阵。
4.应用坐标系转换参数。
将计算得到的坐标系转换参数应用到需要进行坐标系转换的点上,即可将点从参考坐标系转换为目标坐标系。
总之,计算空间直角坐标系转换参数需要确定参考坐标系和目标坐标系,并通过测量旋转关系来计算转换参数。
欧拉角、四元数和转移矩阵是常用的坐标系转换方法,根据实际需求选择合适的方法进行计算。
不同空间直角坐标系的转换
不同空间直角坐标系的转换
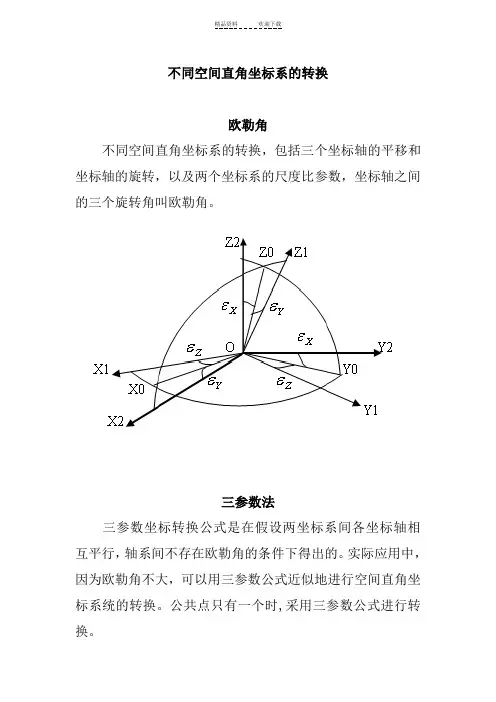
欧勒角
不同空间直角坐标系的转换,包括三个坐标轴的平移和坐标轴的旋转,以及两个坐标系的尺度比参数,坐标轴之间的三个旋转角叫欧勒角。
三参数法
三参数坐标转换公式是在假设两坐标系间各坐标轴相互平行,轴系间不存在欧勒角的条件下得出的。
实际应用中,因为欧勒角不大,可以用三参数公式近似地进行空间直角坐标系统的转换。
公共点只有一个时,采用三参数公式进行转换。
七参数法
用七参数进行空间直角坐标转换有布尔莎公式,莫洛琴斯基公式和范氏公式等。
下面给出布尔莎七参数公式:
坐标转换多项式回归模型
坐标转换七参数公式属于相似变换模型。
大地控制网中的系统误差一般呈区域性,当区域较小时,区域性的系统误差被相似变换参数拟合,故局部区域的坐标转换采用七参数公式模型是比较适宜的。
但对全国或一个省区范围内的坐标转换,可以采用多项式回归模型,将各区域的系统偏差拟合到回归参数中,从而提高坐标转换精度。
两种不同空间直角坐标系转换时,坐标转换的精度取决于坐标转换的数学模型和求解转换系数的公共点坐标精度,此外,还与公共点的分布有关。
鉴于地面控制网系统误差在⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111222Z Y X Z Y X Z Y X ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111111222000)1(Z Y X Z Y X Z Y X m Z Y X X Y X Z Y Z εεεεεε
不同区域并非是一个常数,所以采用分区进行坐标转换能更好地反映实际情况,提高坐标转换的精度。
七参数空间直角坐标系坐标转换
七参数空间直角坐标系坐标转换七参数空间直角坐标系坐标转换是一种用于坐标变换的方法,适用于不同坐标系统之间的几何空间数据转换。
该方法通过使用七个参数,将一个空间直角坐标系的坐标值转换为另一个空间直角坐标系的坐标值。
下面我将详细介绍七参数空间直角坐标系坐标转换的原理和步骤。
首先,我们需要了解各个参数的含义。
七参数包括三个平移参数(dx、dy、dz),三个旋转参数(rx、ry、rz),以及一个尺度参数(s)。
这些参数被用来描述两者之间的相对位移、旋转和尺度差异。
在进行坐标转换之前,我们需要确定参考坐标系和待转换坐标系之间的关系。
通常,一个参考点在两个坐标系之间进行观测,并且由以参考点为中心的变换可以表示为:X'=s(R*(X-T))其中,X'是待转换坐标系中的坐标,X是参考坐标系中的坐标,s是尺度因子,R是旋转矩阵,T是平移矩阵。
接下来,我们需要通过一组已知的点对来确定这七个参数的值。
通常情况下,我们至少需要三对已知点来确定平移参数和尺度参数;当需要考虑旋转参数时,通常需要更多的已知点对。
这些已知点对可以通过GNSS观测、GNSS/INS组合观测、摄影测量等手段来获取。
一旦我们确定了这七个参数的值,就可以使用它们来进行坐标转换了。
转换的步骤如下:1. 对于待转换的每一个坐标点(X, Y, Z),将其减去参考点的坐标得到(dx, dy, dz)。
2. 根据旋转参数(rx, ry, rz),计算旋转矩阵R。
3.计算变换矩阵R*(X-T)得到(X',Y',Z')。
4.使用尺度参数s来调整坐标(X',Y',Z')。
5. 将(X', Y', Z')加上平移参数(dx, dy, dz)得到最终的转换坐标。
需要注意的是,七参数空间直角坐标系转换是一种近似转换方法,它基于一些假设和简化,如刚体变换、平行投影等。
在实际应用中,可能会存在一定的误差。
空间直角坐标系与球坐标系的转换方法
空间直角坐标系与球坐标系的转换方法简介空间直角坐标系和球坐标系是数学中常用的两种表示空间中点的坐标系。
本文将介绍这两种坐标系之间的转换方法,帮助读者更好地理解它们之间的关系。
空间直角坐标系空间直角坐标系是三维空间中最常见的坐标系,通常用三个坐标轴来表示空间中的点。
假设三个坐标轴分别为x轴、y轴和z轴,一个点在直角坐标系中的坐标可以表示为(x, y, z)。
球坐标系球坐标系是另一种常用的坐标系,它使用点到坐标系原点的距离、点在xy平面上的投影到x轴的角度和点在xz平面上的投影到z轴的角度来表示点的位置。
一个点在球坐标系中的坐标通常表示为(r, θ, φ),其中r是点到原点的距离,θ是点在xy平面上的极角,φ是点在xz平面上的极角。
直角坐标系到球坐标系的转换将一个点的直角坐标系坐标(x, y, z)转换为球坐标系坐标(r, θ, φ)的过程比较简单。
首先可以计算点到原点的距离r: $r = \\sqrt{x^2 + y^2 + z^2}$然后,可以计算极角θ: $θ = \\arctan(\\frac{y}{x})$最后,计算极角φ:$φ = \\arccos(\\frac{z}{r})$球坐标系到直角坐标系的转换如果已知一个点在球坐标系中的坐标(r, θ, φ),要将其转换为直角坐标系中的坐标(x, y, z)也是可行的。
转换公式如下: $x = r \\cdot \\sin(θ) \\cdot \\cos(φ)$ $y = r \\cdot \\sin(θ) \\cdot \\sin(φ)$ $z = r \\cdot \\cos(θ)$通过这些公式,我们可以方便地在空间直角坐标系和球坐标系之间进行坐标转换,从而更灵活地描述和计算空间中的点的位置。
结论空间直角坐标系和球坐标系是表示空间中点的两种常用方法,它们之间存在简单的转换关系。
这种转换关系在数学和物理等领域有着广泛的应用,帮助人们更好地理解和描述空间中的事物。
空间几何中的坐标系与空间直角坐标的转换
空间几何中的坐标系与空间直角坐标的转换在空间几何中,坐标系是进行点位置表示和计算的重要工具。
常见的空间坐标系有直角坐标系、柱坐标系和球坐标系等。
其中,空间直角坐标系是最为常用和便捷的一种坐标系。
本文将讨论空间几何中的坐标系,并介绍如何在不同坐标系间进行转换。
一、空间直角坐标系空间直角坐标系又称笛卡尔坐标系,由三个相互垂直的坐标轴构成,通常用x、y、z表示。
它们分别代表了水平方向(x轴)、竖直方向(y轴)和水平面内的垂直方向(z轴)。
一个点P在空间直角坐标系中的坐标可用有序数(x, y, z)表示,其中x、y、z分别为点P在x轴、y 轴、z轴上的投影长度。
二、空间坐标系的转换在空间几何的研究中,通常需要将一个坐标从某个坐标系转换为另一个坐标系。
下面以空间直角坐标系与球坐标系为例,介绍坐标系间的转换过程。
1. 空间直角坐标系到球坐标系的转换给定空间直角坐标系中点P(x, y, z),它的球坐标为(r, θ, φ)。
其中,r 代表点P到原点的距离,θ代表从x轴到点P的连线与x轴正向之间的夹角,φ代表从正z轴到点P的连线与正z轴之间的夹角。
根据三角函数的关系,可以得到:r = √(x^2 + y^2 + z^2)θ = arctan(y/x)φ = arccos(z/√(x^2 + y^2 + z^2))2. 球坐标系到空间直角坐标系的转换给定球坐标系中点P(r, θ, φ),它的空间直角坐标为(x, y, z)。
转换公式如下:x = r * sin(φ) * cos(θ)y = r * sin(φ) * sin(θ)z = r * cos(φ)通过上述转换公式,可以在空间直角坐标系和球坐标系之间进行坐标转换。
三、应用举例下面通过一个具体的例子来说明空间坐标系的转换。
例:已知空间直角坐标系中的点P(3, 4, 5),求其在球坐标系中的坐标。
根据转换公式,可以计算得到:r = √(3^2 + 4^2 + 5^2) = √50θ = arctan(4/3) ≈ 0.93φ = arccos(5/√50) ≈ 0.49因此,点P在球坐标系中的坐标为(√50, 0.93, 0.49)。
三维四参数空间直角坐标转换计算方法
一、引言在地图制图、航空航天、导航定位等领域,经常需要进行三维空间直角坐标的转换计算。
在进行这类计算时,常常会涉及到三维四参数空间直角坐标的转换。
本文将介绍三维四参数空间直角坐标转换的计算方法及其应用。
二、三维四参数空间直角坐标的定义三维空间中,直角坐标系通常用(x, y, z)表示。
在进行坐标转换时,需要考虑到可能存在的平移、旋转、缩放等变换。
三维四参数空间直角坐标则包括了平移在x、y、z三个方向上的位移和绕某个轴的旋转角度。
三、三维四参数空间直角坐标转换的计算方法1. 平移变换的计算方法平移变换是指在x、y、z三个方向上的位移。
假设平移量分别为tx、ty、tz,那么进行平移变换后的坐标可以表示为:x' = x + txy' = y + tyz' = z + tz2. 旋转变换的计算方法绕某个轴的旋转变换通常用旋转矩阵来表示。
以绕z轴的旋转为例,旋转角度为θ,那么进行旋转变换后的坐标可以表示为:x' = x*cosθ - y*sinθy' = x*sinθ + y*cosθz' = z3. 综合变换的计算方法综合平移和旋转变换后,坐标的变换可以表示为:x' = (x - xs)*cosθ - (y - ys)*sinθ + xty' = (x - xs)*sinθ + (y - ys)*cosθ + ytz' = z + zt四、三维四参数空间直角坐标转换的应用在实际应用中,三维四参数空间直角坐标转换通常用于地图制图、航空航天、导航定位等领域。
在地图制图中,需要将世界坐标系中的地理坐标转换为局部坐标系中的平面坐标,就需要进行三维四参数空间直角坐标的转换。
在航空航天领域,导航定位系统也需要进行三维坐标的转换计算,以确定飞行器的位置和姿态。
五、结论三维四参数空间直角坐标转换是现代科学技术中常见的数学计算方法,具有广泛的应用价值。
大地坐标与空间直角坐标转换
大地坐标与空间直角坐标转换在地理空间相关的领域中,大地坐标和空间直角坐标是两种常用的坐标系统。
大地坐标通常用经度和纬度表示,是为了描述地球表面上的点的位置而设计的坐标系统;而空间直角坐标则是一种常用的三维笛卡尔坐标系,用来描述平面内的点的位置。
在实际应用中,有时候我们需要将一个点从大地坐标系转换到空间直角坐标系,或者反过来进行转换,这就需要进行一定的坐标转换计算。
大地坐标的表示大地坐标通常是以经度(Longitude)和纬度(Latitude)表示的。
经度表示东西方向,是一个0到360度的值,通常以东经为正值,西经为负值。
纬度表示南北方向,是一个-90到90度的值,赤道为0度,南纬为负值,北纬为正值。
空间直角坐标的表示空间直角坐标是以直角坐标系表示的,通常是三维笛卡尔坐标系,包括X、Y和Z三个坐标轴。
X轴和Y轴在平面内垂直,Z轴垂直于平面,组成一个右手坐标系。
一个点在空间直角坐标系中的位置可以由其X、Y和Z坐标值表示。
大地坐标与空间直角坐标的转换大地坐标和空间直角坐标之间的转换涉及到地球的椭球面和大地水准面的关系,通常需要考虑椭球体参数、大地水准面的高度等因素。
实际转换过程中可能涉及到大圆距离、球面三角计算等复杂的数学运算。
结论大地坐标与空间直角坐标之间的转换是地理信息处理中一个重要的问题,通常需要借助专业的地理信息系统软件或者编程语言进行计算。
在进行坐标转换时,需要考虑到地球的椭球体特征以及大地水准面的高度影响,以确保转换的准确性。
对于从事地理测绘、地图制作、地理信息系统等领域的人员,熟练掌握大地坐标与空间直角坐标之间的转换方法是非常重要的。
以上就是关于大地坐标与空间直角坐标转换的一些内容,希望对您有所帮助。
直角坐标变换公式
直角坐标变换公式直角坐标变换公式是数学中常用的一种变换方法,用于将一个点从一个直角坐标系转换到另一个直角坐标系中。
这种变换可在二维或三维空间中进行,根据不同的坐标系,有不同的公式和方法。
二维空间中的直角坐标变换在二维空间中,通常使用笛卡尔坐标系,即平面直角坐标系。
这个坐标系由两个互相垂直的坐标轴x和y组成,通过这两个轴可以表示一个点的位置。
假设我们有一个点P(x, y),需要将它从一个直角坐标系转换到另一个直角坐标系。
设转换后的坐标为P’(x’, y’),两个坐标系之间的关系可以用以下公式表示:x' = a * x + b * y + cy' = d * x + e * y + f其中a、b、c、d、e和f是转换矩阵的元素,它们的具体数值决定了两个坐标系之间的关系。
通过求解这些元素,我们可以获得从一个坐标系到另一个坐标系的变换公式。
使用这些公式,我们可以方便地进行坐标变换。
例如,如果我们知道一个点在一个直角坐标系中的坐标,并且我们知道两个坐标系之间的转换公式,我们就可以计算出这个点在另一个坐标系中的坐标。
三维空间中的直角坐标变换在三维空间中,同样使用笛卡尔坐标系,即空间直角坐标系。
这个坐标系由三个互相垂直的坐标轴x、y和z组成,通过这三个轴可以表示一个点的位置。
类似于二维空间中的情况,假设我们有一个点P(x, y, z),需要将它从一个直角坐标系转换到另一个直角坐标系。
设转换后的坐标为P’(x’, y’, z’),两个坐标系之间的关系可以用以下公式表示:x' = a * x + b * y + c * z + dy' = e * x + f * y + g * z + hz' = i * x + j * y + k * z + l同样,a、b、c、d、e、f、g、h、i、j、k和l是转换矩阵的元素,通过求解这些元素,我们可以获得从一个坐标系到另一个坐标系的变换公式。
空间直角坐标转换
空间直角坐标转换当需要将不同基准(参考椭球)的坐标相互转换时,例如54椭球的坐标转换为WGS -84椭球坐标、或在RTK 测量中计算坐标转换参数时,可以利用工测通软件GSP 的空间直角坐标转换功能。
工测通软件GSP 下载地址: /gspGSP 可以通过计算两个空间直角坐标系间的转换参数,也可以直接利用转换参数进行坐标转换。
转换参数计算可以选用布尔莎模型或莫洛金斯基模型,可以选用计算出3个平移、3个旋转和1个尺度的7参数或计算3个旋转和1个尺度的4参数模型。
计算时,首先导入或输入公共点的两套空间直角坐标和需要转换的其他点的坐标,公共点的点数需要2个以上,然后在表格中选择公共点为,选择转换参数个数和模型: 技术细节 1) 利用3个及以上公共点时,采用最小二乘平差方法按等权方式计算转换参数,同时计算出单位权中误差,及每个转换点的转换误差。
2) 4参数计算,是以第一个点为基准,计算到其他点的坐标增量,然后再计算旋转参数与尺度参数。
3) 布尔莎模型与莫洛金斯基模型转换参数中仅平移参数不同(因旋转中心不同),当然由于计算原因可能出现旋转和尺度参数有微小差异。
4) 莫洛金斯基模型的转换中心采用网的重心。
单击,GSP将首先计算出转换参数,然后利用转换参数计算转换坐标,并将公共点的转换坐标残差计算出来。
提示:1)如果是大地坐标请利用GSP转换成空间直角坐标。
2)在RTK测量中计算7参数时,可以先将地面平面坐标转换为大地坐标,采用正常高代替大地高,再转换成空间直角坐标,然后进行转换参数计算,对WGS-84坐标进行转换后将会是正常高结果。
当有转换参数时,可以将转换参数先输入,并选择,然后单击,即可完成坐标的转换工作。
七参数空间直角坐标系坐标转换
七参数空间直角坐标系坐标转换七参数空间直角坐标系坐标转换是一种将不同基准下的直角坐标系坐标相互转换的方法。
七参数包括三个平移参数(x、y、z),三个旋转参数(α、β、γ)和一个尺度参数(s)。
这种方法常用于地理信息系统(GIS)、大地测量学、地质学及遥感等领域。
七参数空间直角坐标系坐标转换的原理是通过对源坐标系(即要转换的坐标系)和目标坐标系进行参数化,进而实现坐标系之间的转换。
其中,平移参数表示了源坐标系相对于目标坐标系在三个方向上的平移量,旋转参数表示了源坐标系相对于目标坐标系的旋转角度,尺度参数则表示了两个坐标系之间的尺度差异。
具体来说,七参数空间直角坐标系坐标转换的步骤如下:1.确定源坐标系和目标坐标系,包括它们的基准、坐标原点和坐标轴方向。
2.根据实际测量数据,计算源坐标系和目标坐标系之间的三个平移参数(x、y、z),三个旋转参数(α、β、γ)和一个尺度参数(s)。
这些参数可以通过一系列大地测量或地球物理测量方法得到。
3.根据计算得到的参数,建立转换矩阵。
转换矩阵是一个3×3的矩阵,用于将源坐标系下的点坐标转换为目标坐标系下的点坐标。
4.对于源坐标系中的每一个点,根据转换矩阵进行坐标转换。
具体方法是将源坐标系下的点坐标与转换矩阵相乘,并加上平移参数。
5.得到目标坐标系下的点坐标,完成坐标转换。
需要注意的是,在进行七参数空间直角坐标系坐标转换时,应该尽量选择准确的参数值。
这些参数可以通过现场测量或者前人的实验数据获得。
如果参数值不准确,可能会导致转换结果的偏移或失真。
此外,七参数空间直角坐标系坐标转换通常是一个数学复杂的过程。
为了简化计算,现代的地理信息系统和大地测量软件通常提供了自动化的坐标转换功能,用户只需输入源坐标系和目标坐标系的参数,软件就可以帮助完成坐标转换的计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标转换方法
空间直角坐标系如果其原点不动,绕着某一个轴旋转而构成的新的坐标系,这个过程就叫做坐标旋转。
在旧坐标系中的坐标与在旋转后新坐标系中的坐标有一定的转换关系,这种转换关系可以用转换矩阵来表示。
如图5.7,直角坐标系XYZ,P点的坐标为(x, y, z),其相应的在XY 平面,XZ平面,YZ平面分别为M(x, y,0),Q(x,0, z)和N(0, y, z)。
图 5.7直角坐标系XYZ
设ϑ表示第j 轴的旋转角度,R j (ϑ) 表示绕第j 轴的旋转,其正方向是沿坐标轴向原点看去的逆时针方向。
很明显当j 轴为旋转轴时,它对应的坐标中的j 分量是不变的。
由于直角坐标系是对称的,下面我们以绕Z轴旋转为例推导其旋转变换矩阵,其它两个轴推导和它是一样的。
设图 5.7的坐标绕Z轴逆时针旋转θ角度,新坐标为X 'Y'Z',如图5.8所示:
图 5.8 坐标绕Z 轴逆时针旋转θ角度
由于坐标中的z 分量不变,我们可以简化地在XY 平面进行分分析,如图
5.9所示:
图 5.9坐标绕Z 轴逆时针旋转θ 角度的XY 平面示意图
点 M X 和点M X ' 分别是M 点在X 轴和X '轴的投影。
如图 5.9 cos cos()
sin sin()
X X X X x OM OM MOM OM y MM OM MOM OM ϕθϕθ==∠=-⎧⎨==∠=-⎩ (5-1) cos cos sin sin X X X X x OM OM MOM OM y MM OM MOM OM ϕ
ϕ'''''==∠=⎧⎨'==∠=⎩
(5-2) 把(5-1)式按照三角函数展开得:
cos cos sin sin sin cos cos sin x OM OM y OM OM ϕθϕθ
ϕθϕθ=+⎧⎨=+⎩
(5-3) 把(5-2)式代入(5-3)式得:
cos sin sin cos x x y y x y θθ
θθ''=+⎧⎨''=-+⎩
(5-4) 坐标中的z 分量不变,即z = z'这样整个三维坐标变换就可以写成(用新坐标表
示旧坐标)
cos sin sin cos x x y y x y z z θθ
θθ''=+⎧
⎪''=-+⎨⎪'
=⎩
(5-5)
把式(5-5)用一个坐标旋转变换矩阵R Z (θ) 表示可以写成:
()Z x x y R y z z θ'⎡⎤⎡⎤
⎢⎥
⎢
⎥'=⎢⎥⎢⎥
'⎢⎥⎢⎥⎣⎦⎣⎦
(5-6) cos sin 0()sin cos 0001Z R θθθθθ⎡⎤
⎢⎥
=-⎢⎥⎢⎥⎣⎦
(5-7) 坐标系X 'Y'Z'是坐标系XYZ 绕Z 轴逆时针旋转θ 角度而来,从另一个角度来
看,也可以说坐标系XYZ 是坐标系X 'Y'Z'绕Z'轴逆时针旋转−θ角度而来,所以
根据(5-6)式有:
1()()()Z z z
x x y R y R R z z θθθ-'⎡
⎤⎡⎤
⎢⎥⎢⎥'=⇒=-⎢⎥⎢⎥'⎢⎥⎢⎥⎣⎦⎣⎦
(5-8)。