笛卡尔坐标系内点的旋转公式及镜像公式
球坐标系和笛卡尔坐标系的转换关系
球坐标系和笛卡尔坐标系的转换关系引言在数学和物理学中,我们常常需要描述和分析空间中的点的位置和运动。
为此,数学家和科学家们引入了各种坐标系来描述空间中的点。
球坐标系和笛卡尔坐标系是最常用的两种坐标系之一,它们在许多领域中都得到广泛应用。
球坐标系用来描述三维空间中的点,而笛卡尔坐标系是我们常见的直角坐标系。
本文将探讨球坐标系和笛卡尔坐标系之间的转换关系。
球坐标系的定义球坐标系是一种描述三维空间中点的位置的坐标系。
在球坐标系中,一个点的位置由三个参数确定:半径r、极角θ和方位角ϕ。
半径r表示点与原点的距离,极角θ表示点与正z轴的夹角,方位角ϕ表示点在xy平面投影上的极角。
为了更形象地理解球坐标系,可以将其与地理上的经纬度进行类比。
半径r相当于地球上的纬度,极角θ相当于地球上的纵向经度,方位角ϕ相当于地球上的横向经度。
笛卡尔坐标系的定义笛卡尔坐标系是我们最为熟悉的坐标系,也被称为直角坐标系。
在笛卡尔坐标系中,一个点的位置由三个参数确定:x、y和z。
x轴、y轴和z轴相互垂直,并且交于原点,形成一个三维直角坐标系。
我们可以将笛卡尔坐标系与平面直角坐标系进行类比。
x轴相当于平面直角坐标系中的x轴,y轴相当于y轴,z轴相当于z轴。
球坐标系到笛卡尔坐标系的转换关系为了在球坐标系和笛卡尔坐标系之间进行转换,我们需要找到它们之间的数学关系。
下面是球坐标系到笛卡尔坐标系的转换公式:x = r * sin(θ) * cos(ϕ)y = r * sin(θ) * sin(ϕ)z = r * cos(θ)其中,x、y和z表示点在笛卡尔坐标系中的坐标,r表示半径,θ表示极角,ϕ表示方位角。
通过这些公式,我们可以将球坐标系中的点转换为笛卡尔坐标系中的点。
笛卡尔坐标系到球坐标系的转换关系与球坐标系到笛卡尔坐标系的转换类似,我们也可以通过一组公式将点从笛卡尔坐标系转换为球坐标系。
下面是笛卡尔坐标系到球坐标系的转换公式:r = √(x^2 + y^2 + z^2)θ = arccos(z / r)ϕ = atan2(y, x)其中,r、θ和ϕ表示点在球坐标系中的坐标,x、y和z表示点在笛卡尔坐标系中的坐标。
笛卡尔 坐标系
笛卡尔坐标系
引言概述:
笛卡尔坐标系是一种用于描述平面或空间中点位置的数学工具。
它由法国数学家、哲学家笛卡尔于17世纪提出,并被广泛应用于物理学、几何学、计算机图形学等领域。
本文将从五个大点来详细阐述笛卡尔坐标系的原理、应用和特点。
正文内容:
1. 笛卡尔坐标系的原理
1.1 直角坐标系
1.2 坐标轴和坐标平面
1.3 点的坐标表示
2. 笛卡尔坐标系的应用
2.1 几何学中的应用
2.2 物理学中的应用
2.3 计算机图形学中的应用
3. 笛卡尔坐标系的特点
3.1 简洁明了
3.2 可视化
3.3 精确计算
4. 笛卡尔坐标系的优缺点
4.1 优点
4.2 缺点
5. 笛卡尔坐标系的发展与未来
5.1 发展历程
5.2 新的应用领域
5.3 可能的改进方向
总结:
笛卡尔坐标系作为一种描述点位置的数学工具,具有直观、简洁明了、可视化和精确计算等特点。
它在几何学、物理学和计算机图形学等领域有着广泛的应用。
尽管它存在一些缺点,但随着科技的发展和应用领域的扩展,笛卡尔坐标系仍然具有巨大的潜力和发展空间。
未来,我们可以期待它在更多领域的应用,并通过改进来提高其性能和适用性。
三轴 笛卡尔坐标 逆解 -回复
三轴笛卡尔坐标逆解-回复三轴笛卡尔坐标逆解是指已知一个点的三维笛卡尔坐标系下的坐标值,求解该点对应的三个轴的角度。
这个问题涉及到三角函数的运用和解三角方程的过程。
本文将一步一步回答以下主题:三轴笛卡尔坐标逆解。
第一步:坐标系和角度定义第二步:逆解数学模型和公式推导第三步:逆解的具体步骤和计算示例第一步:坐标系和角度定义三轴笛卡尔坐标系是三维空间中常见的一种坐标系,它由三个相互垂直的轴线组成,通常称为x轴、y轴和z轴。
这三个轴构成了一个正交坐标系,可以用来表示任意一个三维点的位置。
每个轴都有一个对应的角度,分别称为alpha、beta和gamma。
这些角度可以用来描述点在笛卡尔坐标系中的位置。
alpha角度是点在xy平面上与x轴的夹角,beta角度是点在xz平面上与x轴的夹角,gamma角度是点在yz平面上与y轴的夹角。
第二步:逆解数学模型和公式推导为了得到一个点的三轴角度,我们需要先建立逆解的数学模型。
假设已知点在笛卡尔坐标系下的坐标值为(x,y,z),我们需要求解alpha、beta和gamma这三个角度。
首先,我们可以使用三角函数来表示这三个角度和点的坐标值之间的关系。
具体来说,我们可以使用正弦和余弦函数来表示角度和坐标值之间的关系。
接下来,我们需要推导出这些函数的具体形式。
根据三角函数的定义,我们可以得到以下公式:cos(alpha) = x / sqrt(x^2 + y^2)cos(beta) = x / sqrt(x^2 + z^2)cos(gamma) = y / sqrt(y^2 + z^2)sin(alpha) = y / sqrt(x^2 + y^2)sin(beta) = z / sqrt(x^2 + z^2)sin(gamma) = y / sqrt(y^2 + z^2)根据这些公式,我们可以得到一个点的三轴角度和坐标值之间的关系。
第三步:逆解的具体步骤和计算示例为了求解一个点的三轴角度,我们可以按照以下步骤进行计算:1. 输入已知点的坐标值(x,y,z)。
直角坐标变换公式

直角坐标变换公式直角坐标变换公式是数学中常用的一种变换方法,用于将一个点从一个直角坐标系转换到另一个直角坐标系中。
这种变换可在二维或三维空间中进行,根据不同的坐标系,有不同的公式和方法。
二维空间中的直角坐标变换在二维空间中,通常使用笛卡尔坐标系,即平面直角坐标系。
这个坐标系由两个互相垂直的坐标轴x和y组成,通过这两个轴可以表示一个点的位置。
假设我们有一个点P(x, y),需要将它从一个直角坐标系转换到另一个直角坐标系。
设转换后的坐标为P’(x’, y’),两个坐标系之间的关系可以用以下公式表示:x' = a * x + b * y + cy' = d * x + e * y + f其中a、b、c、d、e和f是转换矩阵的元素,它们的具体数值决定了两个坐标系之间的关系。
通过求解这些元素,我们可以获得从一个坐标系到另一个坐标系的变换公式。
使用这些公式,我们可以方便地进行坐标变换。
例如,如果我们知道一个点在一个直角坐标系中的坐标,并且我们知道两个坐标系之间的转换公式,我们就可以计算出这个点在另一个坐标系中的坐标。
三维空间中的直角坐标变换在三维空间中,同样使用笛卡尔坐标系,即空间直角坐标系。
这个坐标系由三个互相垂直的坐标轴x、y和z组成,通过这三个轴可以表示一个点的位置。
类似于二维空间中的情况,假设我们有一个点P(x, y, z),需要将它从一个直角坐标系转换到另一个直角坐标系。
设转换后的坐标为P’(x’, y’, z’),两个坐标系之间的关系可以用以下公式表示:x' = a * x + b * y + c * z + dy' = e * x + f * y + g * z + hz' = i * x + j * y + k * z + l同样,a、b、c、d、e、f、g、h、i、j、k和l是转换矩阵的元素,通过求解这些元素,我们可以获得从一个坐标系到另一个坐标系的变换公式。
常用坐标系转换 -回复
常用坐标系转换-回复常用坐标系转换是一项在三维空间中进行坐标转化的重要技术。
在科学、工程、地理信息系统等领域中,常常需要将不同坐标系下的数据进行转化和对比。
常用的坐标系包括笛卡尔坐标系、极坐标系和球坐标系。
本文将通过一步一步的解析,详细介绍常用坐标系之间的转换原理和方法。
首先,我们先来了解一下常用的三维坐标系。
笛卡尔坐标系是以空间里的原点为中心,直角坐标轴为基准线的一种坐标系。
它用三个相互垂直的坐标轴表示,分别是x轴、y轴和z轴,形成一个直角坐标系。
在笛卡尔坐标系中,我们可以用一个三元组(x, y, z)来表示一个点的位置,其中x、y 和z分别表示点在x轴、y轴和z轴上的坐标。
接下来是极坐标系,极坐标系是以原点为中心,以极轴和极平面来定义平面上的点的坐标系。
极坐标系由极径和极角两个量组成,分别表示点到坐标原点的距离和点的方位角。
在极坐标系中,我们用一个二元组(r, θ)来表示一个点的位置,其中r表示点到原点的距离,θ表示点在极平面上的方位角。
最后是球坐标系,球坐标系是以原点为中心,以半径、极角和方位角来定义空间里的点的坐标系。
球坐标系由半径r、极角θ和方位角ϕ三个量组成,分别表示点到坐标原点的距离、点在极平面上的方位角和点在垂直于极平面的方向的方位角。
在球坐标系中,我们用一个三元组(r,θ,ϕ)来表示一个点的位置。
接下来我们将分别介绍常用坐标系之间的转换方法。
为了方便说明,我们以笛卡尔坐标系与极坐标系的转换为例。
首先,我们考虑如何将一个点的笛卡尔坐标(x, y, z)转换为极坐标(r, θ)。
根据勾股定理,我们可以得到该点到坐标原点的距离r的计算公式:r = √(x²+ y²+ z²)。
然后,我们可以根据该点在xz平面上的投影点的坐标(x', z')来计算θ的值:θ= arctan(z' / x')。
其中,x'和z'分别是点在xz平面上的投影点在x轴和z轴上的坐标。
图像旋转的点坐标映射公式汇总
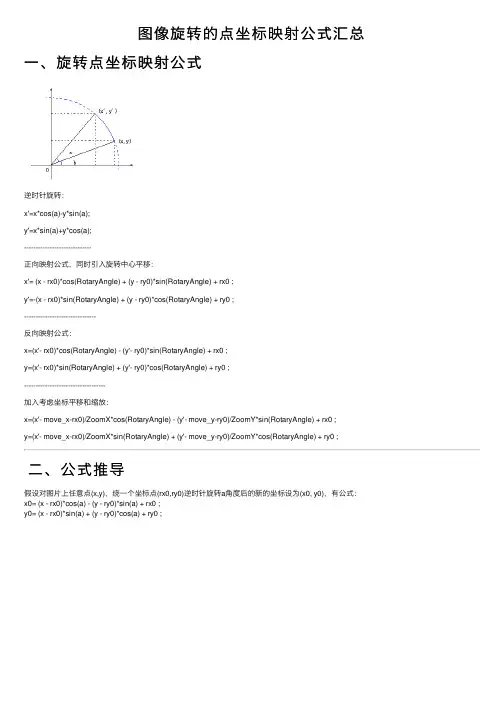
图像旋转的点坐标映射公式汇总⼀、旋转点坐标映射公式逆时针旋转:x'=x*cos(a)-y*sin(a);y'=x*sin(a)+y*cos(a);-----------------------------正向映射公式,同时引⼊旋转中⼼平移:x'= (x - rx0)*cos(RotaryAngle) + (y - ry0)*sin(RotaryAngle) + rx0 ;y'=-(x - rx0)*sin(RotaryAngle) + (y - ry0)*cos(RotaryAngle) + ry0 ;-------------------------------反向映射公式:x=(x'- rx0)*cos(RotaryAngle) - (y'- ry0)*sin(RotaryAngle) + rx0 ;y=(x'- rx0)*sin(RotaryAngle) + (y'- ry0)*cos(RotaryAngle) + ry0 ;-----------------------------------加⼊考虑坐标平移和缩放:x=(x'- move_x-rx0)/ZoomX*cos(RotaryAngle) - (y'- move_y-ry0)/ZoomY*sin(RotaryAngle) + rx0 ;y=(x'- move_x-rx0)/ZoomX*sin(RotaryAngle) + (y'- move_y-ry0)/ZoomY*cos(RotaryAngle) + ry0 ;⼆、公式推导假设对图⽚上任意点(x,y),绕⼀个坐标点(rx0,ry0)逆时针旋转a⾓度后的新的坐标设为(x0, y0),有公式:x0= (x - rx0)*cos(a) - (y - ry0)*sin(a) + rx0 ;y0= (x - rx0)*sin(a) + (y - ry0)*cos(a) + ry0 ;在平⾯中,⼀个点绕任意点旋转θ度后的点的坐标_百度经验【参考资料】任意⾓度的⾼质量的快速的图像旋转上篇纯软件的任意⾓度的快速旋转 - 裴银祥的博客园 - 博客园中篇⾼质量的旋转 - 裴银祥的博客园 - 博客园图像旋转的原理,实现与优化 - CSDN博客快速图像旋转算法的c++实现 - CSDN博客python 简单图像处理4旋转C++和matlab-图像旋转 - Qingsong_Zhao - 博客园图像处理学习笔记之图像的⼏何变换(3)旋转变换 - CSDN博客(实验⼆) --- 图像旋转变换---matlab实现 - CSDN博客【其他】matlab练习程序(图像旋转,双线性插值) - Dsp Tian - 博客园matlab练习程序(图像旋转,最邻近插值) - Dsp Tian - 博客园。
线性代数 坐标变换
线性代数-坐标变换线性代数中的坐标变换是一个重要的概念,它在数学和工程领域有着广泛的应用。
在这篇文章中,我们将深入探讨线性代数中的坐标变换,包括坐标系的转换、矩阵表示和应用等内容。
坐标系的转换在三维空间中,我们通常使用笛卡尔坐标系来描述点的位置。
当需要将点从一个坐标系转换到另一个坐标系时,我们就需要进行坐标系的转换。
假设有两个坐标系A和B,它们之间的关系可以用一个旋转矩阵R和一个平移向量T来描述。
点P在坐标系A中的坐标表示为向量\[x, y, z\],在坐标系B中的坐标表示为向量\[x’, y’, z’\],则坐标系的转换关系可以表示为:\[P_B = R \times P_A + T\]其中,P\_A是点P在坐标系A中的坐标,P\_B是点P在坐标系B中的坐标,R是旋转矩阵,T是平移向量。
矩阵表示坐标变换可以用一个矩阵来表示,这个矩阵由旋转矩阵和平移向量组合而成。
假设有一个点P在坐标系A中的坐标为向量\[x, y, z\],我们可以将其表示为一个齐次坐标向量\[x, y, z, 1\]。
坐标系A到坐标系B的转换可以表示为一个4x4的矩阵T:\[T = \left[ \begin{array}{cccc} R & T \\ 0 & 1 \end{array} \right]\]其中,R是3x3的旋转矩阵,T是3x1的平移向量,0是一个3x1的零向量,1是一个标量1。
应用坐标变换在计算机图形学、机器人学、计算机视觉等领域有着广泛的应用。
在计算机图形学中,坐标变换可以用来实现物体的旋转、缩放、平移等操作;在机器人学中,坐标变换可以用来描述机器人的位姿和运动;在计算机视觉中,坐标变换可以用来实现图像的几何变换。
总的来说,线性代数中的坐标变换是一个重要的概念,它在数学和工程领域有着广泛的应用。
通过深入研究坐标变换的原理和应用,我们可以更好地理解和应用线性代数的知识。
希望本文能帮助读者更好地理解线性代数中的坐标变换这一概念。
笛卡尔坐标系
笛卡儿坐标系(在这篇文章内,向量与标量分别用粗体与斜体显示。
例如,位置向量通常用表示;而其大小则用来表示。
)在数学里,笛卡儿坐标系(Cartesian坐标系),也称直角坐标系,是一种正交坐标系。
参阅图1 ,二维的直角坐标系是由两条相互垂直、0 点重合的数轴构成的。
在平面内,任何一点的坐标是根据数轴上对应的点的坐标设定的。
在平面内,任何一点与坐标的对应关系,类似于数轴上点与坐标的对应关系.采用直角坐标,几何形状可以用代数公式明确的表达出来。
几何形状的每一个点的直角坐标必须遵守这代数公式。
例如,一个圆圈,半径是 2 ,圆心位于直角坐标系的原点。
圆圈可以用公式表达为:。
图1历史笛卡尔坐标系是由法国数学家勒内·笛卡尔创建的.1637年,笛卡尔发表了巨作《方法论》.这本专门研究与讨论西方治学方法的书,提供了许多正确的见解与良好的建议,对于后来的西方学术发展,有很大的贡献。
为了显示新方法的优点与果效,以及对他个人在科学研究方面的帮助,在《方法论》的附录中,他增添了另外一本书《几何》。
有关笛卡儿坐标系的研究,就是出现于《几何》这本书内.笛卡儿在坐标系这方面的研究结合了代数与欧几里得几何,对于后来解析几何、微积分、与地图学的建树,具有关键的开导力.二维坐标系统参阅图2 ,二维的直角坐标系通常由两个互相垂直的坐标轴设定,通常分别称为x—轴和y—轴;两个坐标轴的相交点,称为原点,通常标记为O ,既有“零”的意思,又是英语“Origin”的首字母。
每一个轴都指向一个特定的方向。
这两个不同线的坐标轴,决定了一个平面,称为xy-平面,又称为笛卡儿平面。
通常两个坐标轴只要互相垂直,其指向何方对于分析问题是没有影响的,但习惯性地(见右图),x-轴被水平摆放,称为横轴,通常指向右方;y—轴被竖直摆放而称为纵轴,通常指向上方。
两个坐标轴这样的位置关系,称为二维的右手坐标系,或右手系。
如果把这个右手系画在一张透明纸片上,则在平面内无论怎样旋转它,所得到的都叫做右手系;但如果把纸片翻转,其背面看到的坐标系则称为“左手系”.这和照镜子时左右对掉的性质有关。
坐标旋转变换公式
坐标旋转变换公式在计算机图形学和几何学中,坐标旋转变换公式是一种重要的数学工具,用于描述物体在平面上或空间中的旋转运动。
通过坐标旋转变换公式,我们可以将一个点或一组点绕某个轴进行旋转,从而实现模拟物体的旋转效果。
在本文中,我们将介绍二维和三维空间中的坐标旋转变换公式,以及如何利用这些公式进行旋转操作。
二维坐标旋转变换公式在二维空间中,我们常用的坐标旋转变换公式如下:对于一个点(x,y),绕原点逆时针旋转$\\theta$角度后的新坐标(x′,y′)计算公式如下:$$ x' = x \\cdot \\cos(\\theta) - y \\cdot \\sin(\\theta) $$$$ y' = x \\cdot \\sin(\\theta) + y \\cdot \\cos(\\theta) $$其中,$\\theta$为旋转角度,在数学上通常以弧度为单位。
三维坐标旋转变换公式在三维空间中,坐标旋转变换稍显复杂,我们可以通过矩阵乘法的形式来描述旋转操作。
对于一个三维点(x,y,z),围绕单位向量(a,b,c)与旋转角度$\\theta$进行旋转后的新坐标(x′,y′,z′)计算公式如下:$$ \\begin{bmatrix} x' \\\\ y' \\\\ z' \\end{bmatrix} = \\begin{bmatrix}\\cos(\\theta) + a^2(1-\\cos(\\theta)) & ab(1-\\cos(\\theta)) - c\\sin(\\theta) & ac(1-\\cos(\\theta)) + b\\sin(\\theta) \\\\ ab(1-\\cos(\\theta)) + c\\sin(\\theta) & \\cos(\\theta) + b^2(1-\\cos(\\theta)) & bc(1-\\cos(\\theta)) - a\\sin(\\theta)\\\\ ac(1-\\cos(\\theta)) - b\\sin(\\theta) & bc(1-\\cos(\\theta)) + a\\sin(\\theta) & \\cos(\\theta) + c^2(1-\\cos(\\theta)) \\end{bmatrix} \\cdot \\begin{bmatrix}x \\\\ y \\\\ z \\end{bmatrix} $$其中,(a,b,c)为单位向量,$\\theta$为旋转角度。
高斯平面直角坐标系与笛卡尔坐标系区别
高斯平面直角坐标系与笛卡尔坐标系区别高斯平面直角坐标系和笛卡尔坐标系是数学中两种常用的坐标系表示方法。
它们在表达方式和应用领域上存在一些不同之处。
本文将介绍高斯平面直角坐标系和笛卡尔坐标系的定义、转换关系和应用领域的差异,以便更好地理解它们之间的区别。
定义•高斯平面直角坐标系:高斯平面直角坐标系是一种平面坐标系统,其中点的位置由与两个正交轴上的数值组成。
这两个轴通常被标记为x和y,并且形成了一个直角。
•笛卡尔坐标系:笛卡尔坐标系是一种坐标系统,其中点的位置由与每个坐标轴上的数值组成。
这些轴可以是任意相互垂直的轴,并且在平面上形成直角。
转换关系高斯平面直角坐标系和笛卡尔坐标系之间存在一定的转换关系:•从高斯平面直角坐标系到笛卡尔坐标系的转换可以通过以下公式实现:–x = X + h * Y–y = Y–其中,X和Y表示高斯平面直角坐标系中的点的坐标,x和y 表示对应的笛卡尔坐标系中的点的坐标,h是投影高度。
•从笛卡尔坐标系到高斯平面直角坐标系的转换可以通过以下公式实现:–X = x - h * y–Y = y–其中,x和y表示笛卡尔坐标系中的点的坐标,X和Y表示对应的高斯平面直角坐标系中的点的坐标,h是投影高度。
应用领域的差异高斯平面直角坐标系和笛卡尔坐标系在应用领域上有一些差异:•高斯平面直角坐标系常用于测量和地理领域。
由于高斯平面直角坐标系在局部区域内可以近似为笛卡尔坐标系,因此在小范围内更适用于地图制图和测量工作。
同时,高斯平面直角坐标系也能较好地处理地球椭球体形状的影响,并且在大尺度上能提供更好的测量精度。
•笛卡尔坐标系则广泛用于几何学、物理学、计算机图形学等领域。
它被广泛应用于计算机图像处理和三维计算中,因为其坐标值易于计算和可视化。
在几何学和物理学中,笛卡尔坐标系经常被用来解决空间中的运动和变换问题。
总结高斯平面直角坐标系和笛卡尔坐标系都是常见的数学坐标系表示方法。
它们之间的区别主要体现在定义、转换关系和应用领域上。