【CN110069990A】一种限高杆检测方法、装置以及自动驾驶系统【专利】
一种限高杆提前警示装置

专利名称:一种限高杆提前警示装置专利类型:实用新型专利
发明人:马竹樵,任浙宇,张雨凡,杨继鹏申请号:CN202121257565.X
申请日:20210607
公开号:CN215629575U
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本实用新型提供一种限高杆提前警示装置,属于限高杆警示装置技术领域,本实用新型,包括限高杆本体和辅助装置,其中一个横杆的表面设有辅助装置,辅助装置包括两个支撑杆,支撑杆的表面滑动连接有连接板,连接板的表面固定安装有连接杆,连接杆远离连接板的一端固定安装有支撑板,支撑板的表面固定安装有第一电机,第一电机的输出端固定连接有第一齿轮,连接板的表面固定安装有固定框,固定框的顶部表面固定安装有两个铰接板,铰接板远离固定框的一端固定安装有警示牌。
本实用新型,解决了解决由于车辆驾驶员对自身车高与限高高度的错误估计,而使得超高车辆与限高杆的碰撞事故时有发生,从而造成对限高杆的破坏和车辆的损害。
申请人:南京理工大学紫金学院
地址:210000 江苏省南京市仙林大学城文澜路89号
国籍:CN
代理机构:深圳市兰锋盛世知识产权代理有限公司
代理人:罗炳锋
更多信息请下载全文后查看。
用于自动驾驶的目标检测方法、装置及设备[发明专利]
![用于自动驾驶的目标检测方法、装置及设备[发明专利]](https://img.taocdn.com/s3/m/c45934ccf9c75fbfc77da26925c52cc58bd69039.png)
专利名称:用于自动驾驶的目标检测方法、装置及设备专利类型:发明专利
发明人:罗壮,张雪,张海强,李成军
申请号:CN202111089962.5
申请日:20210917
公开号:CN113538546B
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本申请是关于一种用于自动驾驶的目标检测方法、装置及设备。
该方法包括:获取单目拍摄设备采集的图像;将所述图像输入预设单目3D目标检测模型中,得到所述图像中的目标物的预测高度;根据所述预测高度、所述目标物的中心点在所述图像中的位置、所述单目拍摄设备在世界坐标中的安装高度及所述单目拍摄设备的内参,计算所述目标物的中心点的深度先验值;根据所述深度先验值,得到所述目标物的中心点的深度值。
本申请提供的方案,能够在预测深度值z的过程中解除模型与单目相机的耦合,从而提升模型的泛化性,提升目标检测结果的可靠性。
申请人:智道网联科技(北京)有限公司
地址:100013 北京市东城区北三环东路36号1号楼B601
国籍:CN
代理机构:北京中知君达知识产权代理有限公司
更多信息请下载全文后查看。
一种基于机器视觉识别的限高检测方法及装置[发明专利]
![一种基于机器视觉识别的限高检测方法及装置[发明专利]](https://img.taocdn.com/s3/m/4727e0d267ec102de3bd8966.png)
专利名称:一种基于机器视觉识别的限高检测方法及装置专利类型:发明专利
发明人:刘展海,何伟,刘展航
申请号:CN201910998023.9
申请日:20191021
公开号:CN110940319A
公开日:
20200331
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于机器视觉识别的限高检测方法及装置,该检测方法包括以下步骤:调整摄像机构摄像头的焦距,校准摄像头的图像坐标系;采集车辆图像;根据车辆图像中目标车辆位于车辆图像的景深刻度线相对应的纵向刻度,获得目标车辆的高度信息;采集目标车辆行驶前方的限高杆图像;根据限高杆图像中目标限高杆位于所在限高杆图像的景深刻度线相对应的纵向刻度,获得目标限高杆的高度信息;将目标限高杆的高度信息与目标车辆的高度信息进行比对;获得高度差;该检测方法能够实现车辆整体高度检测和限高杆高度检测,通过对比检测车辆和限高杆的高度进行分析,根据分析结果判断是否超高。
申请人:广东互动电子网络媒体有限公司
地址:511500 广东省清远市清远高新技术产业开发区科技创新园创兴大道18号天安智谷展示服务中心自编99号
国籍:CN
代理机构:广州高炬知识产权代理有限公司
代理人:杨明辉
更多信息请下载全文后查看。
一种智能监测预警限高杆[实用新型专利]
![一种智能监测预警限高杆[实用新型专利]](https://img.taocdn.com/s3/m/a7ef2d01b8f67c1cfad6b8e8.png)
专利名称:一种智能监测预警限高杆专利类型:实用新型专利
发明人:路肖尧
申请号:CN201820303542.X
申请日:20180306
公开号:CN209741706U
公开日:
20191206
专利内容由知识产权出版社提供
摘要:本实用新型涉及公路车辆限高领域,特别公开了一种智能监测预警限高杆。
它包括限高杆、激光发射装置、PLC控制系统和光敏元件,在使用过程中,激光发射装置始终向光敏元件发射激光,激光所在位置为限高杆所能通过的车辆最高的位置,PLC控制系统与光敏元件连接,光敏元件接收到来自激光发射装置的光信号后将其转化成电信号,当车辆高度超过限高时,激光则会被车辆高出的部分遮挡住,光敏元件则接收不到光信号,PLC控制系统接收不到转化来的电信号后就会控制红灯亮起,并控制广播发出警告声,通知超高车辆驶入限高分流道将车辆分流,防止危险事故发生。
申请人:路肖尧
地址:250000 山东省济南市马鞍山路56号1—2—501
国籍:CN
代理机构:济南泉城专利商标事务所
代理人:刘燕丽
更多信息请下载全文后查看。
一种CCA检测方法、装置、存储介质和终端[发明专利]
![一种CCA检测方法、装置、存储介质和终端[发明专利]](https://img.taocdn.com/s3/m/5d7a470d998fcc22bdd10d3a.png)
专利名称:一种CCA检测方法、装置、存储介质和终端专利类型:发明专利
发明人:孟杰,高明刚
申请号:CN201710812144.0
申请日:20170911
公开号:CN109495923A
公开日:
20190319
专利内容由知识产权出版社提供
摘要:本发明公开了一种CCA检测方法、装置、存储介质和终端,该方法包括:终端获取来自基站的CCA检测延迟时间;终端检测待发送数据的数据量是否达到预设数据量阈值;在达到预设数据量阈值的情况下,在CCA检测延迟时间内对上行物理控制信道的子帧进行CCA检测。
本发明使得非授权载波可以进行上行工作,并且由终端侧来执行CCA检测,整个过程简便、易行,提升了系统性能,解决了因非授权载波上不支持上行工作,无法在终端侧发送上行数据之前由终端侧进行CCA检测的问题。
申请人:中兴通讯股份有限公司
地址:518057 广东省深圳市南山区高新技术产业园科技南路中兴通讯大厦法务部
国籍:CN
代理机构:工业和信息化部电子专利中心
代理人:于金平
更多信息请下载全文后查看。
【CN110096960A】目标检测方法及装置【专利】
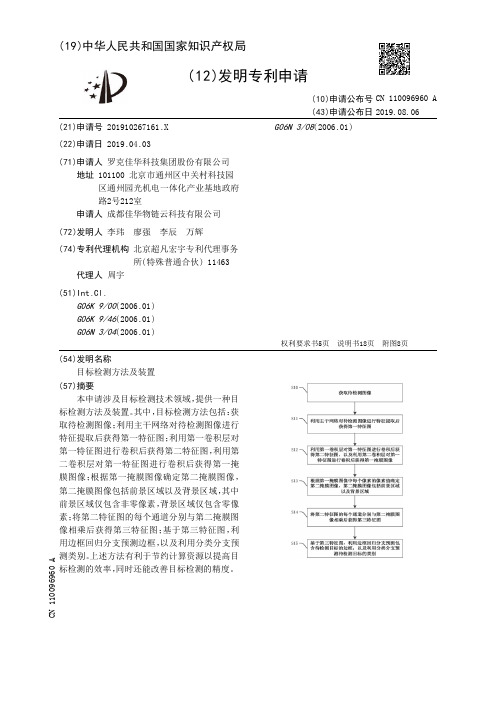
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910267161.X(22)申请日 2019.04.03(71)申请人 罗克佳华科技集团股份有限公司地址 101100 北京市通州区中关村科技园区通州园光机电一体化产业基地政府路2号212室申请人 成都佳华物链云科技有限公司(72)发明人 李玮 廖强 李辰 万辉 (74)专利代理机构 北京超凡宏宇专利代理事务所(特殊普通合伙) 11463代理人 周宇(51)Int.Cl.G06K 9/00(2006.01)G06K 9/46(2006.01)G06N 3/04(2006.01)G06N 3/08(2006.01)(54)发明名称目标检测方法及装置(57)摘要本申请涉及目标检测技术领域,提供一种目标检测方法及装置。
其中,目标检测方法包括:获取待检测图像;利用主干网络对待检测图像进行特征提取后获得第一特征图;利用第一卷积层对第一特征图进行卷积后获得第二特征图,利用第二卷积层对第一特征图进行卷积后获得第一掩膜图像;根据第一掩膜图像确定第二掩膜图像,第二掩膜图像包括前景区域以及背景区域,其中前景区域仅包含非零像素,背景区域仅包含零像素;将第二特征图的每个通道分别与第二掩膜图像相乘后获得第三特征图;基于第三特征图,利用边框回归分支预测边框,以及利用分类分支预测类别。
上述方法有利于节约计算资源以提高目标检测的效率,同时还能改善目标检测的精度。
权利要求书5页 说明书18页 附图8页CN 110096960 A 2019.08.06C N 110096960A权 利 要 求 书1/5页CN 110096960 A1.一种目标检测方法,其特征在于,用于利用预训练的神经网络模型检测待检测目标,所述神经网络模型包括主干网络、第一卷积层、第二卷积层、边框回归分支以及分类分支,所述方法包括:获取待检测图像;利用所述主干网络对所述待检测图像进行特征提取后获得第一特征图;利用所述第一卷积层对所述第一特征图进行卷积后获得第二特征图,以及利用所述第二卷积层对所述第一特征图进行卷积后获得第一掩膜图像;根据所述第一掩膜图像中每个像素的像素值确定第二掩膜图像,所述第二掩膜图像包括前景区域以及背景区域,所述第二掩膜图像在所述前景区域中仅包含非零像素,表示对所述第二特征图中包含所述待检测目标的区域的预测,所述第二掩膜图像在所述背景区域中仅包含零像素,表示对所述第二特征图中不包含所述待检测目标的区域的预测;将所述第二特征图的每个通道分别与所述第二掩膜图像相乘后获得第三特征图;基于所述第三特征图,利用所述边框回归分支预测包含所述待检测目标的边框,以及利用所述分类分支预测所述待检测目标的类别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910203757.3
(22)申请日 2019.03.18
(71)申请人 北京中科慧眼科技有限公司
地址 100085 北京市海淀区创业中路32号
楼32-1-1-559
(72)发明人 孟然 肖志鹏 柴华 赖海峰
王哲 杜继霞 庞尊莹
(74)专利代理机构 北京远立知识产权代理事务
所(普通合伙) 11502
代理人 李海燕
(51)Int.Cl.
G06K 9/00(2006.01)
(54)发明名称一种限高杆检测方法、装置以及自动驾驶系统(57)摘要本发明提供一种限高杆检测方法、装置以及自动驾驶系统,应用于双目立体相机,该限高杆检测方法包括:根据预设检测范围过滤掉目标图像对应的视差图上的无效点,得到有效点视差图;将所述有效点视差图沿三维坐标系的X方向,在Y、Z所在的平面进行投影,统计每一行像素在每个视差值上的有效点数,得到投影图像;过滤掉所述投影图像上的无效投影点与无效Blob,得到有效Blob图像;反投影所述Blob图像至所述三维坐标系,根据X轴、Y轴及Z轴坐标,确定限高杆所在的矩形位置。
本发明通过双目相机对同一个目标成像,基于双目视觉获取空间障碍物信息,通过对图像进行处理计算,能够确定在预设检测
范围内是否存在限高杆。
权利要求书2页 说明书4页 附图5页CN 110069990 A 2019.07.30
C N 110069990
A
权 利 要 求 书1/2页CN 110069990 A
1.一种限高杆检测方法,应用于双目立体相机,其特征在于,包括:
根据预设检测范围过滤掉目标图像对应的视差图上的无效点,得到有效点视差图;
将所述有效点视差图沿三维坐标系的X方向,在Y、Z所在的平面进行投影,统计每一行像素在每个视差值上的有效点数,得到投影图像;
过滤掉所述投影图像上的无效投影点与无效Blob,得到有效Blob图像;
反投影所述Blob图像至所述三维坐标系,根据X轴、Y轴及Z轴坐标,确定限高杆所在的矩形位置。
2.如权利要求1所述的限高杆检测方法,其特征在于,所述根据预设检测范围过滤掉目标图像对应的视差图上的无效点,得到有效点视差图包括:
基于所述预设检测范围及所述预设检测范围所对应的视差值范围计算每个视差值对应的横向像素坐标范围与纵向像素坐标范围;
基于所述横向像素坐标范围与所述纵向像素坐标范围对每个点的视差值、横坐标、纵坐标进行是否属于所述预设检测范围的判断;
根据判断结果,过滤掉所述视差图上的无效点,得到所述有效点视差图。
3.如权利要求1所述的限高杆检测方法,其特征在于,所述根据预设检测范围过滤掉目标图像对应的视差图上的无效点,得到有效点视差图包括:
基于所述预设检测范围及所述预设检测范围所对应的视差值范围计算每个视差值对应的横向像素坐标范围与纵向像素坐标范围;
基于所述横向像素坐标范围、所述纵向像素坐标范围、及其对应的视差值、构建所述横向像素坐标范围、所述纵向像素坐标范围、及其所述对应的视差值不同组合对应的点是否为有效点的查找表,根据所述查找表过滤掉所述视差图上的无效点,得到所述有效点视差图。
4.如权利要求1所述的限高杆检测方法,其特征在于,所述过滤掉所述投影图像上的无效投影点与无效Blob,得到有效Blob图像包括:
将投影图像上的每个点的值与预设点数阈值进行比较,在所述每个点的值低于所述预设点数阈值时,确定该点为无效点,并过滤掉所述无效点;
将投影图像上的每个Blob进行形态学处理,并将处理结果与Blob阈值进行比较,在所述处理结果小于所述Blob阈值时,确定该Blob为无效Blob,并过滤掉所述无效Blob。
5.如权利要求1所述的限高杆检测方法,其特征在于,在所述确定限高杆所在的矩形位置之后,所述限高杆检测方法还包括:
通过所述矩形位置及对应的视差值计算出限高杆与车辆的距离信息;
根据所述距离信息触发车辆的报警程序,用于向用户发送报警信息。
6.一种限高杆检测装置,应用于双目立体相机,其特征在于,包括:
第一过滤模块,用于根据预设检测范围过滤掉目标图像对应的视差图上的无效点,得到有效点视差图;
投影模块,用于将所述有效点视差图沿三维坐标系的X方向,在Y、Z所在的平面进行投影,统计每一行像素在每个视差值上的有效点数,得到投影图像;
第二过滤模块,用于过滤掉所述投影图像上的无效投影点与无效Blob,得到有效Blob 图像;
2。