ADVISOR控制策略优化方法(原创教程)
advisor原创教程
ADVISOR2002基础到高级引导教程(原创)By Scofision From NJUST第一部分:软件安装及使用ADVISOR是基于matlab/simulink开发的先进电动汽车软件,主要功能是用于分析,而不是设计,从我对其help的阅读了解,ADVISOR需要且最好安装在matlab6.1上,当然matlab6.5+需要安装补丁(补丁由mathworks提供的),当然还有网传的matlab在更高版本上运行,可信度不高(后面分析,还有弊端),并有人以此为牟利,我和另一个朋友ID:继续潜水,不提倡网上朋友花钱购买那个,而继续潜水也根据他的研究,提供了一种方法可以在高版本上运行,但对于有二次开发需求的朋友,高版本上二次开发貌似还有缺陷,需要继续研究。
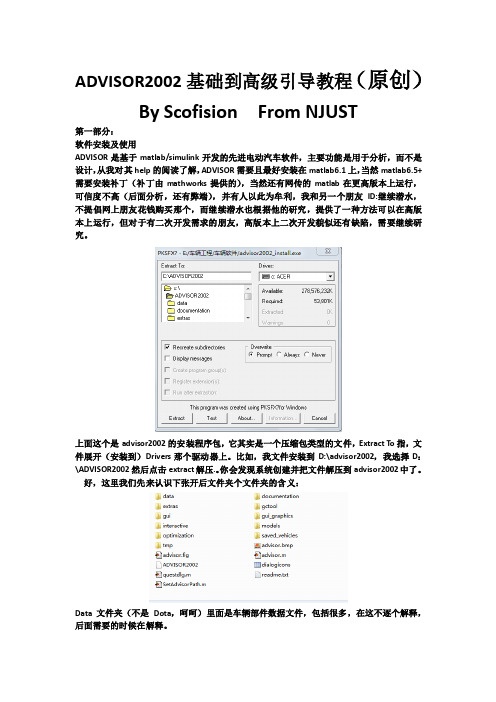
上面这个是advisor2002的安装程序包,它其实是一个压缩包类型的文件,Extract T o指,文件展开(安装到)Drivers那个驱动器上。
比如,我文件安装到D:\advisor2002,我选择D:\ADVISOR2002然后点击extract解压.。
你会发现系统创建并把文件解压到advisor2002中了。
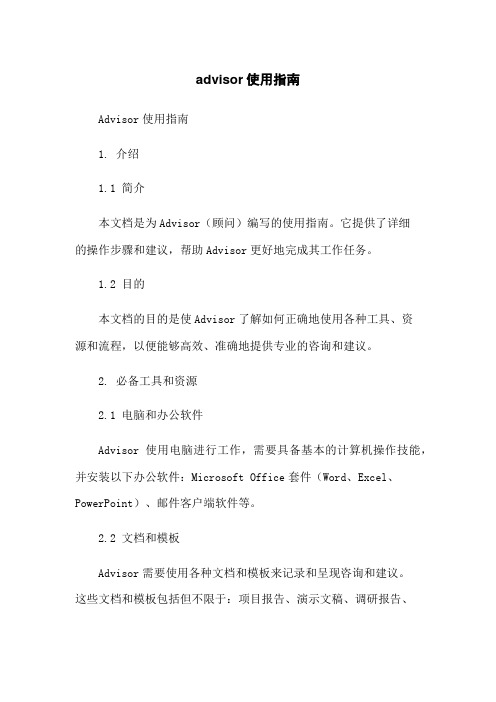
好,这里我们先来认识下张开后文件夹个文件夹的含义:Data文件夹(不是Dota,呵呵)里面是车辆部件数据文件,包括很多,在这不逐个解释,后面需要的时候在解释。
Documentation文件夹是帮助文件夹,里面都是帮助文件,当然你可以在软件开启的时候,打开,有些浏览器问题可能会打不开,你可以在浏览器地址栏输入:D:\advisor2002\documentation\advisor_ch1.htm上句地址的含义是在你所安装的advisor文件夹中找到advisor_ch1.htm文件而已。
Extras文件夹是扩展文件夹,包含着,电池模型扩展;发动机模型扩展;发动机map图转成数据图(image2map,这里的2代表to(two=to),转换的意思,开发的人为了方便,写成这样,后面有好多都是这样的表示);还有简单的数据比较文件夹;发动机比例转换;还有第三方优化软件VSOLE的文件夹。
基于ADVISOR的复合电源模糊控制策略研究
基于ADVISOR的复合电源模糊控制策略研究作者:张智林来源:《速读·下旬》2015年第04期摘要:本文针对现有的复合电源电动汽车功率分配的逻辑门限控制策略的不足,为复合电源系统的功率分配设计了一种效果更好的模糊逻辑控制策略,最后对复合电源系统的整车进行联合仿真。
仿真结果表明所设计的模糊逻辑控制策略比传统的逻辑门限控制策略更能发挥复合电源的特点,更好地为蓄电池电流削峰填谷,同时保证了整车的动力性。
关键词:复合电源系统;功率分配策略;模糊控制Abstract: The logic threshold control strategy in the present composite power electric vehicles power distribution is inadequate. The text designs an improved fuzzy logic control strategy which has a better effect in the power distribution of the composite power supply system. Finally, do co-simulation of composite power system of the vehicle. Simulation results show that the improved fuzzy logic control strategy can give full play to characteristics of the composite power and has better guarantee for battery current load shifting, at the same time, ensuring the vehicle's dynamic than the traditional logic gate limit control strategy.Keywords: composite power system; power allocation strategy; fuzzy control混合动力汽车具有节能环保的优势,对车载电源有较高的要求,但目前的车载电源还不能较好的满足使用性能需求。
2.ADVISOR模型详解

离合器模块 前向传递路径
发动机附件模块
排放后处理模块
燃料蓄电池汽车
串联式混合动力汽车
后向传递路径
控制策略模块
发电机模块
前向传递路径
并联式混合动力汽车
后向传递路径
如何更换封装后模型的图片?
前向传递路径
并联式SA混合动力汽车
——单轴并联ISG混合动力汽车
后向传递路径
哪里不同? 本田Insight动力传动模型
因为一般道路的坡度不大, cos ≈1;良好路面的 f 值较小,可以认为 b-fr≈b,a+fr ≈a; T j 的数值也较小,忽略不计;并取 hw hg 。使公式简化为:
FZ 1
hg b du G Fw G sin m L L dt
FZ 2
hg a du G G sin m F w L L dt
du T j Fw hw dt
T j T j1 T j 2
滚动阻力偶矩:Tf=Tf1+Tf2=Gcosα fr
若将作用在汽车上诸力对前轮与道路接触面中心取力矩,则后轮的地面法向反力
FZ 2
G cos (a fr ) Ghg sin m hg L
du T j Fw hw dt
加速惯性转矩损失
控制策略详解-变速器-换挡策略
模型详解-电机
控制策略接口
控制策略详解-电机及控制器-控制策略
最大功率限制
驻车状态关闭电机
换挡时关闭电机
模型详解-电器附件
根据配置计算电附件总功率
模型详解-功率总线
需求总功率
对发电机的需求功率
对电池的需求功率
控制策略与优化算法

控制策略与优化算法在当今日益复杂和多样化的社会环境中,控制系统的设计和优化变得愈加重要。
无论是在生产制造、交通运输、能源管理还是环境保护等领域,控制策略和优化算法的应用都能够显著提升系统的效率和性能。
本文将探讨控制策略和优化算法在现代系统中的应用和发展趋势。
第一节:控制策略的分类和特点在控制系统中,控制策略是实现目标的关键。
根据不同的应用领域和要求,控制策略可以分为许多不同的类型。
常见的控制策略包括比例积分微分(PID)控制、模糊控制、自适应控制和模型预测控制等。
1.1 PID控制PID控制是一种经典的闭环控制策略,它通过测量误差、积分误差和微分误差来调整输出信号,使系统的输出达到期望值。
PID控制具有简单、稳定、易于实现的优点,因此在许多领域得到广泛应用。
然而,PID控制也存在参数难以调整、对非线性系统效果不佳的限制。
1.2 模糊控制模糊控制是一种基于模糊逻辑的控制策略,它使用模糊规则来处理系统模糊和不确定性的问题。
模糊控制通过模糊化输入输出以及定义模糊规则和模糊推理,实现输出的调整。
模糊控制在处理非线性和不确定性系统方面具有一定的优势。
1.3 自适应控制自适应控制策略可以根据系统的动态特性和参数变化,实时调整控制器的参数。
自适应控制通过不断的参数辨识和调整,使系统能够适应不同工况和环境的变化。
自适应控制在强非线性和时变系统中表现出色。
1.4 模型预测控制模型预测控制是一种基于模型的控制策略,它使用系统的数学模型进行预测,并根据预测结果来优化控制信号。
模型预测控制具有灵活性和较强的优化能力,可以在控制系统中实现多目标优化。
第二节:优化算法的原理和应用优化算法是控制系统中优化问题的求解方法,它通过寻找最优解来优化控制系统的性能。
常见的优化算法包括遗传算法、粒子群算法、模拟退火算法和蚁群算法等。
2.1 遗传算法遗传算法模拟自然界生物遗传的过程,通过选择、交叉和变异等操作对个体进行进化。
遗传算法具有并行搜索、全局搜索和鲁棒性强的特点,适用于多变量、多目标和非线性问题的优化。
advisor使用指南
advisor使用指南Advisor使用指南1. 介绍1.1 简介本文档是为Advisor(顾问)编写的使用指南。
它提供了详细的操作步骤和建议,帮助Advisor更好地完成其工作任务。
1.2 目的本文档的目的是使Advisor了解如何正确地使用各种工具、资源和流程,以便能够高效、准确地提供专业的咨询和建议。
2. 必备工具和资源2.1 电脑和办公软件Advisor使用电脑进行工作,需要具备基本的计算机操作技能,并安装以下办公软件:Microsoft Office套件(Word、Excel、PowerPoint)、邮件客户端软件等。
2.2 文档和模板Advisor需要使用各种文档和模板来记录和呈现咨询和建议。
这些文档和模板包括但不限于:项目报告、演示文稿、调研报告、市场分析报告等。
请确保您获得所需的文档和模板,并妥善保存和管理它们。
3. 工作流程3.1 项目接洽与需求梳理在开始任何项目之前,Advisor需要与客户进行接洽并梳理项目需求。
这包括与客户进行沟通、收集客户要求和目标,并明确项目的规模、时间表和预算。
3.2 数据收集与分析在进行任何咨询和建议之前,Advisor需要对相关数据进行收集和分析。
这包括市场调研、数据采集和统计分析等。
使用适当的工具和方法来处理数据,以获得准确的结果。
3.3 制定咨询和建议方案基于数据分析和市场调研结果,Advisor需要制定咨询和建议方案。
这包括明确问题陈述、提出解决方案和制定实施计划。
确保方案与客户的需求和目标相符,并在可行性和可行性方面进行充分评估。
3.4 咨询和建议实施根据制定的方案,Advisor将开始实施咨询和建议。
这可能涉及改进流程、培训团队成员、制定执行计划等。
确保与客户进行密切合作,并根据实际情况进行必要的调整和优化。
3.5 监督和评估在咨询和建议实施过程中,Advisor需要对项目进行监督和评估。
这包括监测关键指标、定期更新客户、收集反馈和评估实际结果。
基于Advisor的PHEV动力参数匹配和仿真优化

基于Advisor的PHEV动力参数匹配和仿真优化农业装备与车辆工程2015年0引言现在所研究的混合能源汽车有3类:并联式,串联式和混联式。
并联式在各项指标上具有其优越性。
在汽车动力总成设计过程中需要大量的推演,而在理论设计的基础上,运用仿真软件进行模拟仿真能够大大缩短设计的时间[1]。
本论文就以一种城市客车为原型,在理论设计的基础上,依靠仿真软件对设计进行了验证,体现了仿真与理论设计相结合的优越性。
1动力系统总成选型PHEV 的动力系统主要由以下4个部分组成:发动机、车用电动机、电池以及传动系统等。
1.1整车参数与性能指标本文所要设计的参考车型整车参数如表1。
依据设计车型目标工况,选定汽车控制策略为发动机提供正常行驶时的功率,电动机为辅助动力[2]。
根据以上特点,确定的汽车设计性能指标如表2所示。
1.2PHEV 动力系统总功率设计首先,依据最高车速确定总功率[3],即满足式(1):P 1=13600η(mgf +C d Av 221.15)v(1)式中:η———传动效率;m ———汽车总质量,kg ;g ———重力加速度,m/s 2;f ———滚动阻力系数;C d ———风阻系数;A ———迎风面积,m 2;v ———行驶车速,km/h 。
其次,根据汽车低速爬坡时的要求确定总功收稿日期:2014-11-02修回日期:2014-11-14doi :10.3969/j.issn.1673-3142.2015.03.006基于Advisor 的PHEV 动力参数匹配和仿真优化夏芝安,归文强,贺志瑛,薛昊强(710064陕西省西安市长安大学汽车学院)[摘要]在深入研究了混合动力汽车动力总成类型的基础上,根据设计参数要求,设计了一种并联式混合动力客车动力总成。
为了验证设计的正确性,运用Advisor 软件对城市循环工况下的动力性能进行了仿真,基本验证了设计的正确性。
为了使设计结果更完善,又利用该仿真软件优化了匹配结果并再次进行了仿真。
ADVISOR工作原理及机制
ADVISOR工作原理及机制3.1ADVISOR文档结构图3.1.1 ADVISOR文档结构3.1.1文件交互作用及数据流●输入脚本定义工作空间的变量,也能调用其他输入脚本。
例如MC_PM32.m。
●模块为Simulink文档,文档包含用来计算输出量的方程式,比如通过发动机的工况图来计算燃油消耗。
这些模块都是模型,例如BD_PAR.mdl。
●输出脚本通过查询工作空间来对模型的输出进行后处理。
这些后处理包括绘图和检错两大部分,例如chkoutputs.m。
●控制脚本既可对输入进行改进,也可对输出进行处理。
例如ADVISOR GUI和优化程序。
3.1.2文件地址ADVISOR主路径(例如C:\ADVISOR或C:\Program Files\ADVISOR)下还包含若干个子路径。
这些子路径主要为数据、GUI和模型路径,其下包含相关文档。
3.1.3文档命名习惯所有的模型和数据文档都用“前缀_*”来表示,该前缀和定义变量用的前缀一致。
使用到这些变量的Simulink块的结尾都会给出该前缀,置于尖括号< >中。
这里给出ADVISOR部件文档的类型:ACC_*.M Accessory load files 附加载荷文档。
CYC_*.M Driving cycle files, which define variables starting with cyc_, used in the block labeled <cyc>驾驶循环工况文档,其定义的变量以前缀cyc_开头,这些变量在标有<cyc>的块中被使用。
ESS_*.M Energy storage system data files, which likewise define variables starting with ess_, used in the block labeled <ess>能量存储系统数据文档,其定义的变量以前缀ess_开头,这些变量在标有<ess>的块中被使用。
基于ADVISOR的混合动力电动汽车再生制动控制策略的研究
第27卷 第4期2010年8月黑龙江大学自然科学学报J OURNAL OF NATURAL SC IENCE O F HE I LONG JI ANG UN IVERS I TY V o l 27N o 4A ugust ,2010基于ADV ISOR 的混合动力电动汽车再生制动控制策略的研究张 宇1, 周美兰1, 王旭东1, 卢显淦1, 袁 博2(1.哈尔滨理工大学电气学院,哈尔滨150040;2.华南理工大学机械与汽车工程学院,广州510640)摘 要:针对混合动力汽车仿真软件ADV ISOR 中原有制动力分配策略的不足,在其再生制动模型基础上,从动力学角度建立了各制动力制动份额随载荷变化的模型,并将所提出的策略在AD V I SOR 软件中对哈飞样车进行了仿真。
仿真结果表明所提出的控制策略回收制动能量的效果优于原有的再生制动控制策略,排放也有所改善,电机效率明显提高,同时这种分配方式也符合制动力法规的分配要求;并通过试验进一步验证了该策略的合理性。
此模型有效地拓展了ADV I SOR 的仿真范围,方便了对混合动力电动汽车的研究。
关键词:混合动力;ADV I SOR ;再生制动;载荷变化;仿真中图分类号:TP273文献标志码:A 文章编号:1001-7011(2010)04-0551-06收稿日期:2009-12-26基金项目:教育部科学技术研究重点资助项目(208037)作者简介:张 宇(1984-),女,硕士,主要研究方向:汽车电子技术及其仿真分析通讯作者:周美兰(1962-),女,教授,博士0 引 言随着汽车产量的迅速增长,汽车耗油量占全部石油产量的份额越来越大。
再生制动是目前混合动力汽车回收制动能量采取的普遍技术,电动汽车、混合动力汽车与传统汽车的一个最重要的区别是可以实现再生制动,能回收一部分传统车辆在制动过程中损失的能量,这样大大提高了汽车燃油经济性,节约能耗[1]。
本文在汽车仿真软件ADV ISOR 的基础上构造了再生制动过程中制动力分配的仿真模型并进行了仿真实验,结果表明所提出的方法可使车辆在行驶过程中能量回收效率提高,有害气体排放也有所降低。
自动控制系统的优化方法
自动控制系统的优化方法自动控制系统是现代工业生产中必不可少的一部分。
为了保证系统的高效稳定运行,需要进行系统优化。
本文将介绍自动控制系统的优化方法,并探讨其在现实应用中的重要性。
一、前言自动控制系统的优化是指通过调整系统参数和控制策略,使系统达到最佳性能。
这不仅可以提高系统的响应速度和稳定性,还可节约能源、降低成本。
针对不同的系统,有多种优化方法可供选择。
二、PID控制器优化PID控制器是自动控制系统中最常用的一种控制器。
其优化方法主要包括参数整定和控制策略调整。
1. 参数整定常用的参数整定方法有经验整定法和自整定法。
经验整定法基于经验公式,根据工程师的经验和实际需求进行参数调整。
自整定法则是利用数学方法和系统响应曲线,通过寻找最佳参数组合来优化控制器的性能。
2. 控制策略调整在实际应用中,控制策略的选择直接影响系统的性能。
常见的控制策略包括比例控制、积分控制、微分控制和串级控制等。
根据系统的特性和需求,调整控制策略以优化系统的性能。
三、先进控制方法除了PID控制器优化外,还有一些先进的控制方法可应用于自动控制系统的优化。
1. 模型预测控制(MPC)模型预测控制利用数学模型预测未来的系统响应,并根据预测结果进行控制策略调整。
这种方法不仅考虑当前状态,还能预测未来状态,因此控制效果更优。
2. 自适应控制自适应控制是根据实时系统状态调整控制参数和策略的一种方法。
通过实时分析系统的状态和性能,动态地调整控制参数,以适应系统的变化。
四、优化方法在现实应用中的重要性自动控制系统的优化方法在工业生产中扮演着重要角色。
1. 提高生产效率优化控制系统可以提高生产线的效率和质量。
通过调整控制参数和策略,减少系统的误差和响应时间,提高生产线的稳定性和响应速度。
2. 节约能源自动控制系统的优化方法可以有效地节约能源。
通过合理地控制工艺参数,减少能源消耗,降低生产成本。
3. 降低故障率通过优化自动控制系统,可以减少设备的故障率。
修改ADVISOR控制策略的的个人经验
1、打开vehicle controls 文件夹库
打开位置:advisior2002--models--library--lib_controls
2、进入lib_controls,点击edit,选择unlock library(解锁后,才能修改这里面的控制模块)
3、选择你需要修改的模块,复制粘贴,并重命名,默认为在原名后加1。
(例如,下面就是电辅助控制策略,先复制粘贴系统库的模块,然后在复制出来的模块里修改,这样才不会破坏系统文件)
4、进入复制粘贴后的模块。
点击edit--link options,选择break links。
然后根据自己需要,在模块里添加、删除、修改模块或参数均可。
保存。
5、修改顶层模块
打开你需要控制的某一具体车型的整体mdl文件,另命名,保存。
6、在整车mdl模型中,找到你需要修改的子模块位于哪里,点击进去尽情的修改(温馨提醒:这里主要是注意自己先前修改的控制策略而引入的控制变量参数,通过GoTo或者from来实现参数传递)。
7、修改m文件。
因为advisor里仿真的实质是通过m函数来调用各个模块,进行参数和变量的传递。
因此,必须修改m函数,上面的修改才有意义,不然根本不会产生任何的作用。
修改m文件,其实就是把你控制策略引入的新参数和新文件模块在驱动链里声明。
具体请参考教材230-231.这里我也不清楚呀,学长~
个人经验,如有错误,欢迎批评指正~。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADVISOR控制策略优化毛冲2014年7月8日1、综述控制策略优化程序的目的确定控制策略参数,以满足用户指定的目标和约束,通过调整控制策略参数和重新评估性能标准直至满足所有要求。
目前,advisor有两种优化方法。
第一种方法基于matlab,它通过扫描一维和二维多级参数,并且使用内置逻辑来确定合适的配置参数。
第二种方法使用VisualDOC优化软件来确定合适的配置参数。
每一种控制策略优化程序都只提供一种方案来解决优化问题。
因此,结果只能作为参考。
在这两种方法中,建议先自动改变汽车参数,但是不是必须的。
在优化过程中,控制策略优化程序要定义坡度和加速度性能约束条件。
当调整设计变量时,控制策略优化程序将会确保汽车让然满足这些约束条件这种控制策略优化程序适用于串联(包括燃料电池汽车)和并联混合动力汽车。
在advisor中传统和纯电动汽车不能优化控制策略参数。
2、控制策略优化设置窗口图1是控制策略优化设置窗口,这个界面允许用户定义如何使优化程序进行设置设计变量、目标和约束条件。
图1:控制策略优化设置窗口2.1选择优化方法用户选择优化程序的计算方法。
如果选择 "Optimize using VisualDOC" 按钮,将会使用VisualDOC优化软件确定解决方案。
另外,也可以使用基于matlab的优化方法。
VisualDOC只有有限的版本支持advisor,如果在你的电脑中没有安装一个完整的VisualDOC的授权版本,你将会仅限于5个设计变量。
2.2选择循环/测试过程Cycle/Test Procedure Selection用户必须决定是否为一个单独的驾驶循环或者测试过程来优化控制策略参数,用户可以选择在控制策略优化设置窗口中所有可用的驾驶循环和测试过程。
要注意对测试过程的优化可能显著增加解决优化问题所需的时间,也要注意汽车对单一循环的优化不一定能够为气体驾驶循环或者测试过程提供好的结果。
2.3配置设计变量Design Variables在这个部分,用户必须定义优化程序可以修改哪一个设计变量。
只能修改那些选择的设计变量,其他变量则保持不变。
如果使用基于matlab 的优化程序,soc的下限和上限将不能再作为设计变量,因为可以在基于matlab的优化程序中更有效的设置这两个参数。
然后,用户必须为每一个选择的设计变量定义初始条件、下限和上限,默认的初始条件是在matlab工作空间中的当前参数值。
此外,如果使用基于matlab的优化程序,用户必须指定在执行每一级参数扫描过程中扫描点的数量。
第一级参数扫描中点的数量规定了过程分辨率或者在下限和上限之间要评估的点的数量,第二级参数扫描中点的数量规定了更高的分辨率或者在第一级参数扫描中最佳值附近要评估的点的数量。
比如,给定下面一组输入,upper bound = 1 number of points in the first sweep = 4lower bound = 0 number of points in the second sweep = 3图2:多级参数扫描第一级参数扫描将会在 X = [0 0.25 0.5 0.75 1.0]中评估汽车性能,假设最佳结果出现在X =0.75,然后第二级参数扫描将会在X = [0.5 0.666 0.833 1.0] 中评估汽车性能。
这个例子显示在图2中,从两级参数扫描中得到的综合数据可以确定最佳设置。
2.4配置目标/约束Objective/Constraints用户必须配置在选择最佳最佳设计变量值时使用的约束和目标。
如果选择了OBJ单选按钮,那么在计算归一化目标函数时就会考虑到这些参数。
否则,这些参数将会被视为约束条件。
为了简单地忽略某些参数,可以选择CON单选按钮,并且将其值设置为-1。
对于那些被指定为目标的参数,用户必须指定相应的权重因子,它决定了该参数在归一化目标函数中的重要程度。
只有那些被激活的目标参数才能被包含在目标函数计算过程中,归一化目标函数的最小化和计算方法如下公式所示,此处,排放性:燃油经济性:是第i个目标参数。
现在可以点击按钮来执行优化程序,然后你将会有机会编辑和接受将要执行的已经存在的或默认(如果不能执行自动尺寸设计程序时)的性能约束。
在执行优化程序之前,会先计算完成整个优化程序所需的时间。
此时,用户可以选择继续执行程序,或者选择取消。
选择CANCEL 将会返回到控制策略优化设置窗口,然后重新设置优化参数或者退出。
要注意评估时间仅仅是估计时间,它会随着计算机处理速度和选择的循环/从测试过程的长度而变化。
3.控制策略优化绘图在执行优化程序过程中,将会为用户提供各种反馈图片。
当使用VisualDOC 时,你会收到两个不同的图片。
第一幅图(图3)显示了每一个设计变量的值及其相应的上限和下限,此时程序将会执行一个完整的二阶Koshal 交互式设计(关于Koshal 设计方法的更多信息,请参考相关VisualDOC 文献),当程序执行时图3会不断更新。
第二幅图(图4)显示了在每一次迭代计算中使归一化目标函数最小化的过程,此外它也显示了最优化变量的值。
随迭代次数变化的变量值会以红色显示出来,约束参数的状态以及每一部分目标和归一化目标函数的重要性也会显示出来,这幅图会在每次优化迭代过程中不断更新。
当优化结束后,将会激活按钮,它允许你查看在优化过程中如何调整设计变量的值。
图3:设计变量图当使用基于matlab的优化程序时,绘图历史按钮将会提供类似于图5和图6所示的图片。
图5:一维参数扫描结果:图6:二维参数扫描结果当使用VisualDOC优化软件时,绘图历史按钮将会提供类似于图7所示的图片。
图7:二维参数扫描结果4.控制策略优化结果当控制策略优化程序结束后,对汽车配置的所有修改都会详细地显示在matlab的命令窗口,并且所有参数值都会在advisor变量列表中得到更新,如图9所示。
此时,建议你回到汽车配置窗口,并且保存汽车配置信息,以便优化结果能够用于未来分析。
图9:matlab命令窗口主要信息5.使用基于matlab的控制策略优化程序基于matlab的控制策略优化程序根据用户指定的目标和约束,使用一维和二维多级参数扫描来确定最佳的控制策略参数,它也使用内置逻辑和优化问题方面的知识尽量快地找到一种解决方案。
但是,这种优化方法不是一种全局最优方法,并且它不考虑设计变量间的相互作用。
首先,估计并且保存当前汽车的性能参数,以便于计算目标函数。
然后,设置已经激活的设计变量值,以使其不会限制汽车的性能。
这些初始参数值如表1所示。
表1:初始参数值然后,优化程序搜索用户定义的每一个活动设计变量的范围,并且把其设置为最佳值。
对于指定的车辆类型,估计并且分配变量新值的顺序与表1中所列的变量顺序一致。
这个顺序是由每一个参数对汽车性能的相对影响程度(由大到小)而决定的,它也与控制策略优化配置窗口中显示的变量顺序一致。
此外,对于串联和并联汽车,如果两个变量都是活动设计变量,那么必须一起估计与它们相关的变量。
比如串联汽车, cs_charge_pwr和cs_min_pwr是相关变量。
比如并联汽车,cs_charge_trq和cs_min_trq_frac 是相关变量。
二维多级参数扫描适用于这些变量,可以使用一维多级参数扫描单独地估计其他变量。
一旦优化程序把所有参数设置为最佳值,就会比较当前汽车性能与初始性能,进而确保目标函数得到改善。
如果没有改善目标函数,就会恢复初始汽车配置。
如果改善了目标函数,那么主要信息会显示在matlab 的命令窗口。
6.使用基于V isualDOC的控制策略优化程序VisualDOC是基于优化软件包的梯度算法,它与其他各种代码和软件包一起使用。
使用基于VisualDOC的控制策略优化程序步骤如下:⑴advisor保存了当前汽车配置信息;⑵VisualDOC使用advisor作为解决方案引擎来完成实验设计(DOE);⑶VisualDOC根据初始DOE结果和每次函数调用后的响应,使用近似响应面法来优化控制策略参数;⑷advisor使用VisualDOC结果更新当前工作空间;为了使用基于VisualDOC的优化程序,一个已经授权的VisualDOC1.2必须安装在计算机中。
为了获得一个完全授权的VisualDOC1.2,请访问V anderPlatts R&D公司网址http:\\。
advisor中包含了一个VisualDOC的有限演示版本,它允许用户解决5个以内设计变量的优化问题。
基于VisualDOC的优化程序也不考虑设计变量间的相互作用,它同样不是一种全局最优方法。
当使用基于VisualDOC的优化程序时,可能使用同样的DOE数据组来完成多次优化。
在执行第一次控制策略优化程序过程中,将创建一组DOE数据。
近似响应面程序根据用户定义的目标和约束,使用这组数据来确定最佳配置。
一旦优化结束,用户可以使用一组不同的目标和约束再进行优化。
当选择了优化控制策略按钮后,系统会提示用户使用现有的DOE数据组或者生成一个新的DOE数据组。
如果使用现有的数据组,那么只能改变目标和约束,也可以编辑当前活动设计变量的条件。
为了使DOE数据组有效,所有的仿真参数必须保持不变。
如果你决定生成一组新的数据,那么你就能够修改任何一个输入参数但是程序将会花费更长的时间。
由于本人水平有限,本文难免会有不足之处,敬请见谅!。