GYJ-0067_15入15出继电器控制板485及232高低电平输入原理图及PCB图
RS485光耦应用电路图
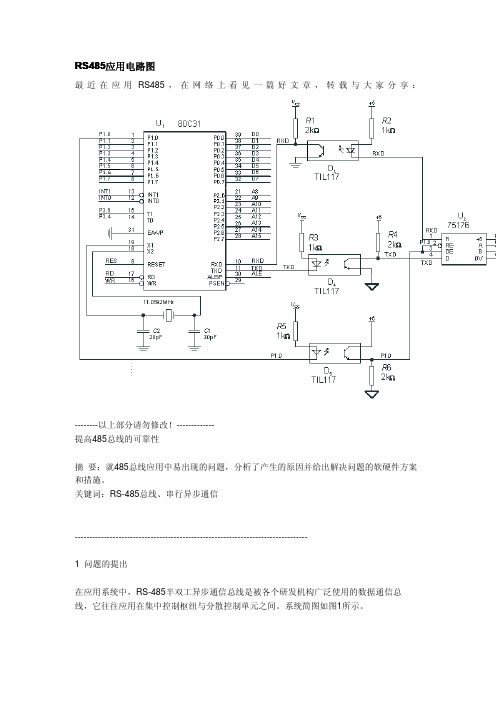
高(通常都在4800波特以上) 。限制通信波特率提高的“瓶颈”,并不是现场的导线(现场 施工一般使用5类非屏蔽的双绞线) ,而是在与单片机系统进行信号隔离的光耦电路上。此 处采用 TIL117。电路设计中可以考虑采用高速光耦,如 6N137 、6N136等芯片,也可以优 化普 通光耦电路参数的设计,使之能工作在最佳状态。例如:电阻 R2、R3如果选取得较大, 将 会 使光耦的发光管由截止进入饱和变得较慢;如果选取得过小,退出饱和也会很慢,所以这两 只电阻的数值要精心选取,不同型号的光耦及驱动电路使得这两个电阻的数值略有差异, 这 一点在电路设计中要特别慎重,不能随意,通常可以由实验来定。 2.3 485总线输出电路部分的设计 输出电路的设计要充分考虑到线路上的各种干扰及线路特性阻抗的匹配。由于工程环境 比较复杂,现场常有各种形式的干扰源,所以485总线的传输端一定要加有保护措施。在电 路设计中采用稳压管 D1、D2组成的吸收回路,也可以选用能够抗浪涌的 TVS 瞬态杂波抑 制器 件,或者直接选用能抗雷击的485芯片(如 SN75LBC184等) 。 考虑到线路的特殊情况(如某一台分机的485芯片被击穿短路) ,为防止总线中其它分 机的通信受到影响,在 75176 的485 信号输出端串联了两个 20Ω的电阻 R10 、R11。这样本 机的 硬件故障就不会使整个总线的通信受到影响。 在应用系统工程的现场施工中,由于通信载体是双绞线,它的特性阻抗为120Ω左右, 所以线路设计时,在 RS-485 网络传输线的始端和末端各应接1只120Ω的匹配电阻(如图2 中 R8) ,以减少线路上传输信号的反射。 由于 RS-485芯片的特性,接收器的检测灵敏度为± 200mV,即差分输入端 VA-VB ≥ +200mV,输出逻辑1,VA-VB ≤-200mV,输出逻辑0;而 A、B 端电位差的绝对值小于 200mV 时,输出为不确定。如果在总线上所有发送器被禁止时,接收器输出逻辑0,这会误认为通 信帧的起始引起工作不正常。解决这个问题的办法是人为地使 A 端电位高于 B 两端电位, 这样 RXD 的电平在485 总线不发送期间(总线悬浮时)呈现唯一的高电平, 8031单片机就不会 被误 中断而收到乱字符。通过在485电路的 A、B 输出端加接上拉、下拉电阻 R7、R9,即可很
GYJ-0063_30路继电器可编程模块485及232产品使用手册

30路继电器可编程模块485及232产品使用手册简要说明:一、尺寸:长233.7mmX宽182.7mmX高25mm二、主要芯片:STC12C60S2支持双串口(支持51系列DIP40封装单片机)三、工作电压:直流12伏供电(另有24V供电)四、串口1(COM1)下载程序,(RS485口使用单机机内部串口2均可与上位机通讯)五、输出供电采用延时通电电路(1至10秒可调)功能:当输出接有被控制设备,避免单片机初次上电(或下载程序)时,输出设备误动作。
此功能在实际应用中起到很大作用五、特点:1、具有电源指示。
2、三十路带光电隔离输出控制继电器。
3、标准的11.0592M晶振。
(便于设置串口波特率)4、具有上电复位和手动复位。
5、支持51系列DIP40封装单片机。
5、输出三十路继电器的供电采用延时供电(避免被控制设备误动作)6、输出三十路具有LED指示。
7、三十路12V继电器控制,控制设备。
8、可控制交流220V/10A一下设备。
9、具有RS232和RS485通信功能(可以同时和上位机通信)。
10、单片机无加密,可插拔更换,可随意更改程序。
使用说明:【标注说明】【接线图】【应用举例接线图】【可以作为输入设备的产品】【可作为输出控制的设备】【原理图】由于原理图比较大,购买后提供PDF格式的。
【PCB图】【上位机界面】(提供源代码)【测试程序】(其它测试程序购买后提供)实现功能:30路输出顺序闭合*********************************************************************/ #include<STC12C5A60S2.h> //库文件#include<jdq30.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************初始定义*********************************************************************/ uchar i;/********************************************************************延时函数*********************************************************************/ void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}/********************************************************************主函数*********************************************************************/ void main(){P4SW|=0x20; //配置P4.5为IO口P4M0|=0x10; //配置P4.4为IO口P4M1|=0x10;P0=P1=P2=P3=0xff;P4|=0x30;while(1){OUT1=0;delay(3000);OUT2=0;;delay(3000);OUT3=0;delay(3000);OUT4=0;delay(3000);OUT5=0;delay(3000);OUT6=0;OUT7=0;delay(3000); OUT8=0;delay(3000); OUT9=0;delay(3000); OUT10=0;delay(3000); OUT11=0;delay(3000); OUT12=0;delay(3000); OUT13=0;delay(3000); OUT14=0;delay(3000); OUT15=0;delay(3000); OUT16=0;delay(3000); OUT17=0;delay(3000); OUT18=0;delay(3000); OUT19=0;delay(3000); OUT20=0;delay(3000); OUT21=0;delay(3000); OUT22=0;delay(3000); OUT23=0;delay(3000); OUT24=0;delay(3000); OUT25=0;delay(3000); OUT26=0;delay(3000); OUT27=0;delay(3000); OUT28=0;OUT29=0;delay(3000);OUT30=0;delay(3000);P0=P1=P2=P3=0xff;P4|=0x30;delay(6000);}}/********************************************************************结束*********************************************************************//******************************程序功能: modbus RTU 模式设置读取十六个继电器状态,以及内部保持寄存器的设置读取硬件测试环境:单片机stc89C52RC十六继电器485接口控制板通信协议:晶振:11.0592 波特率:9600 8位数据 1位停止位偶校验 485通位接口P3.7控制方向端控制板地址:修改localAddr(变量)线圈个数:16个线圈地址范围:0x0000~0x000F保持寄存器个数:16个(字节型)寄存器地址:0x0000~0x000F\\******************************\\功能码简介:02:读取单个线圈状态03:读取多个保持寄存器05:设置单个线圈状态06:设置单个寄存器值0F:设置多个线圈10:设置多个保持寄存器汇成科技:华龙电子直销 作者:yangQQ:790244909*******************************/#include "hader\\main.h"uint32 dwTickCount,dwIntTick; //时钟uint8 idata sendBuf[32],receBuf[16]; //发送接收缓冲区uint8 idata checkoutError; // ==2 偶校验错uint8 idata receTimeOut; //接收超时uint8 idata c10ms; //10ms 计时uint8 idata c200ms;bit b1ms,bt1ms,b10ms,bt10ms,b100ms,bt100ms; //定时标志位bit rs232485;//定时处理void timeProc(void){b1ms = 0;if(bt1ms) //如果1ms到{bt1ms = 0;b1ms = 1;if(receTimeOut>0) //如果接收超时值>0{receTimeOut--; //接收超时-1(1ms减1次)if(receTimeOut==0 && receCount>0) //判断通讯接收是否超时{// b485Send = 0; //将485置为接收状态receCount = 0; //将接收地址偏移寄存器清零checkoutError = 0;}}}} // void TimerProc(void)//初始化void initInt(void){SCON = 0xd0;TMOD = 0x21;PCON = 0;TH0 = TIMER_HIGHT;TL0 = TIMER_LOW;TH1= 0xfd;TL1 = 0xfd; //波特率 9600TR0 = 1;TR1=1;ET0 = 1;ES = 1;EA = 1;//串口2设置S2CON = 0xd0; //方式1,9位数据,波特率不可变 S2TB8 偶校验位BRT=0XFD; //设置波特率9600AUXR=0x10; //启动串口1波特率发生器IP=0x00; //优先级默认 //开串口1中断IE2=0x01; //开串口2中断}//初始化void initProg(void){P4SW|=0x20; //配置P4.5为IO口P4M0|=0x10; //配置P4.4为IO口P4M1|=0x10;P0=P1=P2=P3=0xff;P4|=0x30;initInt(); //初始化定时器// b485Send = 0;}//上电时读取上次线圈状态,并设置void forceMultipleCoils1(){uint8 tempAddr;uint8 i,k;uint8 Data;uint8 exit = 0;for(k=0;k<4;k++){switch(k){case 0:Data=coilreg1; break;case 1:Data=coilreg2; break;case 2:Data=coilreg3; break;case 3:Data=coilreg4; break;}for(i=0;i<8;i++){if( Data &0x01==1)setCoilVal(tempAddr,0);elsesetCoilVal(tempAddr,1);Data=Data>>1;tempAddr++;if(tempAddr >=32){exit = 1;break;}}if(exit==1)break;}}void main(void){initProg();localAddr=EEPROMReadByte(0); //从EERPOM的相对0地址读取数据 coilreg1=EEPROMReadByte(1);coilreg2=EEPROMReadByte(2);coilreg3=EEPROMReadByte(3);coilreg4=EEPROMReadByte(4);forceMultipleCoils1();if(localAddr>=10){localAddr=1;EEPROMSectorErase(0); //从EEPROM的相对0地址扇区擦除EEPROMWriteByte(0,localAddr);EEPROMWriteByte(1,coilreg1);EEPROMWriteByte(2,coilreg2);EEPROMWriteByte(3,coilreg1);EEPROMWriteByte(4,coilreg2);}WDT_CONTR =0x32; //大概284.4mswhile(1){timeProc();checkComm0Modbus();}}//定时器0 1ms 中断void timer0IntProc() interrupt 1{TL0 = TIMER_LOW;TH0 = TIMER_HIGHT;dwIntTick++;bt1ms = 1;c10ms++;c200ms++;if(c10ms >= 10){c10ms = 0; //20ms计时器清零bt10ms = 1;WDT_CONTR =0x32; //}} // void Timer0IntProc()// 串行中断1程序void commIntProc() interrupt 4{if(TI){TI = 0;if(sendPosi < sendCount) //如果发送位置小于发送计数,那么继续发送{sendPosi++;ACC = sendBuf[sendPosi];TB8 = P; //加上校验位SBUF = sendBuf[sendPosi];}else //否则发送完毕,置接收状态{// b485Send = 0; //发送完后将485置于接收状态receCount = 0; //清接收地址偏移寄存器checkoutError = 0;}}else if(RI){RI = 0;rs232485=1;receTimeOut = 10; //通讯超时值receBuf[receCount] = SBUF;ACC = receBuf[receCount];if(P != RB8)checkoutError = 2; //偶校验出错receCount++; //接收地址偏移寄存器加1receCount &= 0x0f; //最多一次只能接收16个字节}} // void CommIntProc()//串口2中断void uart2_isr() interrupt 8{if( S2CON & 0x02 ){S2CON &= ~0x02;if(sendPosi<receCount) //如果发送位置小于发送计数,那么继续发送{sendPosi++;ACC = receBuf[sendPosi];if(P)S2CON|=0x08; // 7 6 5 4 3 2 1 0 Reset Value//sfr S2CON = 0x9A; //S2 Control S2SM0 S2SM1 S2SM2 S2REN S2TB8 S2RB8 S2TIS2RI 00000000BelseS2CON&=0xf7;S2BUF =receBuf[sendPosi];}else //否则发送完毕,置接收状态{// b485Send = 0; //发送完后将485置于接收状态receCount = 0; //清接收地址偏移寄存器checkoutError = 0;}}else if( S2CON & 0x01)//接收{S2CON &= ~0x01;rs232485=0;receTimeOut = 10; //通讯超时值receBuf[receCount] =S2BUF;ACC = receBuf[receCount];// if(P != RB8)// checkoutError = 2; //偶校验出错receCount++; //接收地址偏移寄存器加1receCount &= 0x0f; //最多一次只能接收16个字节}}/*****************************************************************************************************************************************/#include "STC12C5A60S2.H"#include "INTRINS.H"#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型bit write=0; //写24C08 的标志;uchar dat=0xee; //用于存储单片机接收发送缓冲寄存器SBUF里面的内容uchar sj1; //存储数据值uchar sj2; //存储数据值uchar sj3; //存储数据值uchar sj4; //存储数据值uchar sj5; //存储数据值/*sfr IAP_DATA = 0xC2;sfr IAP_ADDRH = 0xC3;sfr IAP_ADDRL = 0xC4;sfr IAP_CMD = 0xC5;sfr IAP_TRIG = 0xC6;sfr IAP_CONTR = 0xC7;sfr P4 = 0xC0;*///定义Flash 操作等待时间及允许IAP/ISP/EEPROM 操作的常数//#define ENABLE_ISP 0x80 //系统工作时钟<30MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x81 //系统工作时钟<24MHz 时,对IAP_CONTR 寄存器设置此值#define ENABLE_ISP 0x82 //系统工作时钟<20MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x83 //系统工作时钟<12MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x84 //系统工作时钟<6MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x85 //系统工作时钟<3MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x86 //系统工作时钟<2MHz 时,对IAP_CONTR 寄存器设置此值//#define ENABLE_ISP 0x87 //系统工作时钟<1MHz 时,对IAP_CONTR 寄存器设置此值/********************************************************************初始定义*********************************************************************/sbit OUT1=P2^6;sbit OUT2=P2^7;sbit OUT3=P4^4;sbit OUT4=P4^5;sbit OUT5=P0^7;sbit OUT6=P0^6;sbit OUT7=P0^5;sbit OUT8=P0^4;sbit OUT9=P0^3;sbit OUT10=P0^2;sbit OUT11=P0^1;sbit OUT12=P0^0;sbit OUT13=P1^0;sbit OUT14=P1^1;sbit OUT15=P1^4;sbit OUT16=P1^5;sbit OUT17=P1^6;sbit OUT18=P1^7;sbit OUT19=P3^2;sbit OUT20=P3^3;sbit OUT21=P3^4;sbit OUT22=P3^5;sbit OUT23=P3^6;sbit OUT24=P3^7;sbit OUT25=P2^5;sbit OUT26=P2^4;sbit OUT27=P2^3;sbit OUT28=P2^2;sbit OUT29=P2^1;sbit OUT30=P2^0;uchar k=10;/********************************************************************函数声明*********************************************************************/ union union_temp16{uint un_temp16;uchar un_temp8[2];}my_unTemp16;uchar Byte_Read(uint add); //读一字节,调用前需打开IAP 功能void Byte_Program(uint add, uchar ch); //字节编程,调用前需打开IAP 功能void Sector_Erase(uint add); //擦除扇区void IAP_Disable(); //关闭IAP 功能void Delay();/********************************************************************延时函数*********************************************************************/ void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{ ;}}}/******************************************************************** 功能:串口初始化,波特率9600,方式1*********************************************************************/ void Init_Com(void){//串口初始化TMOD = 0x20;SCON = 0x50;TH1 = 0xFd;TL1 = 0xFd;TR1 = 1;ES=1; //开串口1中断//485接口初始化S2CON=0x50; //方式1,八位数据,可变波特率AUXR1=0x00; //1T工作方式BRT=0XFD; //设置波特率9600AUXR=0x10; //启动波特率发生器EA=1; //开总中断IE2=0x01; //开串口2中断}/********************************************************************串口1和串口2 配置*********************************************************************/ void B485_send(uchar c){SBUF=S2BUF=c;}/********************************************************************全开函数*********************************************************************/ void quankai(){P2=0X00;delay(k);OUT19=0;delay(k);OUT20=0;delay(k);OUT21=0;delay(k);OUT22=0;delay(k);OUT23=0;delay(k);OUT24=0;delay(k);OUT3=0;delay(k);OUT4=0;delay(k);OUT13=0;delay(k);OUT14=0;delay(k);OUT15=0;delay(k);OUT16=0;delay(k);OUT17=0;delay(k);OUT18=0;delay(k);P0=0X00;delay(k);}/********************************************************************全关函数*********************************************************************/ void quanguan(){OUT19=1;delay(k);OUT20=1;delay(k);OUT21=1;delay(k);OUT22=1;delay(k);OUT23=1;delay(k);OUT24=1;delay(k);P2=0XFF;delay(k);P3=0XFF;delay(k);OUT3=1;delay(k);OUT4=1;delay(k);OUT13=1;delay(k);OUT14=1;delay(k);OUT15=1;delay(k);OUT16=1;delay(k);OUT17=1;delay(k);OUT18=1;delay(k);P0=0XFF;delay(k);}/********************************************************************接收数据判断函数*********************************************************************/chuankou(){switch(dat) //接收数据判断{case 'I': quankai();SBUF = dat;dat=0xee;write=1;break; // 全开case 'i': quanguan(); SBUF = dat;dat=0xee;write=1;break; // 全关case 'A': OUT1=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第一路开case 'B': OUT2=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第二路开case 'C': OUT3=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第三路开case 'D': OUT4=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第四路开case 'E': OUT5=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第五路开case 'F': OUT6=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第六路开case 'G': OUT7=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第七路开case 'H': OUT8=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第八路开case 'J': OUT9=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第九路开case 'K': OUT10=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十路开case 'L': OUT11=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十一路开case 'M': OUT12=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十二路开case 'N': OUT13=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十三路开case 'O': OUT14=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十四路开case 'P': OUT15=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十五路开case 'Q': OUT16=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第十六路开case 'R': OUT17=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'S': OUT18=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'T': OUT19=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'U': OUT20=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'V': OUT21=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'W': OUT22=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'X': OUT23=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'Y': OUT24=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'Z': OUT25=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '1': OUT26=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '2': OUT27=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '3': OUT28=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '4': OUT29=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '5': OUT30=0;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第三十路开case 'a': OUT1=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第一路关case 'b': OUT2=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第二路关case 'c': OUT3=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第三路关case 'd': OUT4=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第四路关case 'e': OUT5=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第五路关case 'f': OUT6=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第六路关case 'g': OUT7=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第七路关case 'h': OUT8=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第八路关case 'j': OUT9=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'k': OUT10=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'l': OUT11=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'm': OUT12=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'n': OUT13=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'o': OUT14=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'p': OUT15=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'q': OUT16=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'r': OUT17=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 's': OUT18=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 't': OUT19=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'u': OUT20=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'v': OUT21=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'w': OUT22=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'x': OUT23=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'y': OUT24=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case 'z': OUT25=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '6': OUT26=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '7': OUT27=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '8': OUT28=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '9': OUT29=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // ...case '0': OUT30=1;delay(k);SBUF = dat;dat=0xee;write=1;break; // 第三十路关default:break; // 跳出}}/********************************************************************按键函数*********************************************************************//********************************************************************主函数*********************************************************************/void main (void){uint eeprom_address;P4SW|=0x20; //配置P4.5为IO口P4M0|=0x10; //配置P4.4为IO口P4M1|=0x10;Init_Com();//串口初始化eeprom_address = 0x01; //将测试起始地址送eeprom_addresssj1 = Byte_Read(1); //读EEPROM的值,存到read_eepromsj2 = Byte_Read(2); //读EEPROM的值,存到read_eepromsj3 = Byte_Read(3); //读EEPROM的值,存到read_eepromsj4 = Byte_Read(4); //读EEPROM的值,存到read_eepromsj5 = Byte_Read(5); //读EEPROM的值,存到read_eepromP0=sj1;P1=sj2;P2=sj3;P3=sj4;P4=sj5;while(1){chuankou(); // 接收数据判断函数if ( RI ) //扫描判断是否接收到数据,{dat = SBUF; //接收数据SBUF赋与datRI=0; //RI 清零。
GYJ-0179_六路输入三路输出可编程继电器工控开发板 支出扩展232或485控制

【原理图】(提供 PDF 格式的源自理图及 PCB 图) 免费提供与此工控板有关的:资料、例程、原理图 芯片资料、软件。
*********************************************************************
输入控制: 第 1 路输入信号,第 1 路继电器吸合。 第 2 路输入信号,第 1 路继电器断开。 第 3 路输入信号,第 2 路继电器吸合。 第 4 路输入信号,第 2 路继电器断开。 第 5 路输入信号,第 3 路继电器吸合。 第 6 路输入信号,第 3 路继电器断开。 第 7 路输入信号,第 4 路继电器吸合。 第 8 路输入信号,第 4 路继电器断开。
/******************************************************************** 定义数据类型
PC 向单片机发送字符'E'所有继电器输出状态取反单片机返回值'E'。 *********************************************************************/ #include "STC15W408AS.h" #include <intrins.H> #define uchar unsigned char //宏定义字符型变量 #define uint unsigned int //宏定义整型变量 /********************************************************************
【简要说明】
序 号 Type ♦ 产品型号 1. Appearance♦ 产品外形图 2. Outline ♦ 外形尺寸 长 x 宽 x 高 3. Important chips♦ 重要芯片 4. power voltage ♦ 供电电压
GYJ-0007_四路RC吸收回路模块产品使用手册
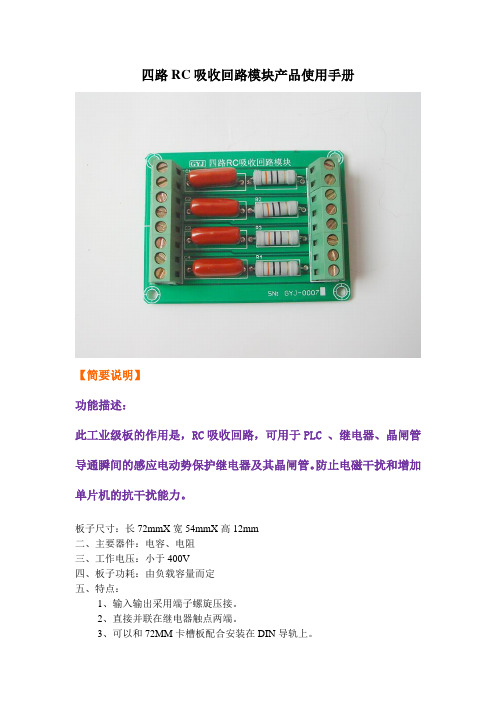
四路RC吸收回路模块产品使用手册【简要说明】功能描述:此工业级板的作用是,RC吸收回路,可用于PLC 、继电器、晶闸管导通瞬间的感应电动势保护继电器及其晶闸管。
防止电磁干扰和增加单片机的抗干扰能力。
板子尺寸:长72mmX宽54mmX高12mm二、主要器件:电容、电阻三、工作电压:小于400V四、板子功耗:由负载容量而定五、特点:1、输入输出采用端子螺旋压接。
2、直接并联在继电器触点两端。
3、可以和72MM卡槽板配合安装在DIN导轨上。
【标示说明】【接线说明】【原理图】提供DXP原理图【元件清单】【PCB图】【应用举例接PLC】【应用举例接继电器】【应用举例接晶闸管】【小知识】RC吸收电路的原理若开关断开,蓄积在寄生电感中能量对开关的寄生电容充电的同时,通过吸收电阻对吸收电容充电。
由于吸收电阻作用,阻抗变大,那么,吸收电容也等效地增加了开关的并联电容容量,为此,抑制开关断开的电压浪涌。
开关接通时,吸收电容通过开关放电,其放电电流被吸收电阻所限制。
RC吸收电路的作用为了限制电路电压上升率过大,确保晶闸管安全运行,常在晶闸管两端并联RC阻容吸收网络,利用电容两端电压不能突变的特性来限制电压上升率。
因为电路总是存在电感的(变压器漏感或负载电感),所以与电容C串联电阻R可起阻尼作用,它可以防止R、L、C电路在过渡过程中,因振荡在电容器两端出现的过电压损坏晶闸管。
同时,避免电容器通过晶闸管放电电流过大,造成过电流而损坏晶闸管。
由于晶闸管过流过压能力很差,如果不采取可靠的保护措施是不能正常工作的。
RC阻容吸收网络就是常用的保护方法之一。
【实物图片展示】【模块加装壳体效果图】。
最新各类继电器原理和引脚图
各类继电器原理和引脚图继电器的工作原理和特性继电器是一种电子控制器件,它具有控制系统(又称输入回路)和被控制系统(又称输出回路),通常应用于自动控制电路中,它实际上是用较小的电流去控制较大电流的一种“自动开关”。
故在电路中起着自动调节、安全保护、转换电路等作用。
电磁继电器的工作原理和特性电磁式继电器一般由铁芯、线圈、衔铁、触点簧片等组成的。
只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。
当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力返回原来的位置,使动触点与原来的静触点(常闭触点)吸合。
这样吸合、释放,从而达到了在电路中的导通、切断的目的。
对于继电器的“常开、常闭”触点,可以这样来区分:继电器线圈未通电时处于断开状态的静触点,称为“常开触点”;处于接通状态的静触点称为“常闭触点”。
热敏干簧继电器的工作原理和特性热敏干簧继电器是一种利用热敏磁性材料检测和控制温度的新型热敏开关。
它由感温磁环、恒磁环、干簧管、导热安装片、塑料衬底及其他一些附件组成。
热敏干簧继电器不用线圈励磁,而由恒磁环产生的磁力驱动开关动作。
恒磁环能否向干簧管提供磁力是由感温磁环的温控特性决定的。
固态继电器(SSR)的工作原理和特性固态继电器是一种两个接线端为输入端,另两个接线端为输出端的四端器件,中间采用隔离器件实现输入输出的电隔离。
固态继电器按负载电源类型可分为交流型和直流型。
按开关型式可分为常开型和常闭型。
按隔离型式可分为混合型、变压器隔离型和光电隔离型,以光电隔离型为最多。
继电器主要产品技术参数额定工作电压是指继电器正常工作时线圈所需要的电压。
根据继电器的型号不同,可以是交流电压,也可以是直流电压。
直流电阻是指继电器中线圈的直流电阻,可以通过万能表测量。
吸合电流是指继电器能够产生吸合动作的最小电流。
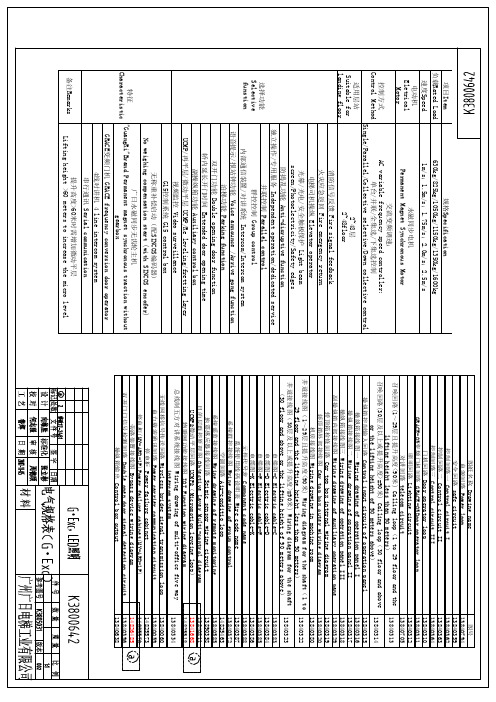
广日电梯G15电气原理图纸K3805031
switch
限速器断绳开关
23
DSK
Governor cutting
rope's switch
25 DS1~DSn
厅门门锁 Hall door lock
轿顶急停开关
26
DTK
Car top emergency
stop switch
控制柜紧急运行开关
35
FJK
Emergency switch
for control cabinet
13840334
13840060 13840059 14825573 14825570 14826485 13840396 13840638
序号 Sequence
number
代号 Code name
4
BZ
5
BZC
34
ELSR
50
IM
59
JSQ
66
KGY1
67
KGY2
82
LBQ
83
MC
84
MC1
85
串行通讯 Serial communication
备注Remarks
提升高度>60米时需增加微动平层 Lifting height >60 meters to increase the micro level
图纸名称 Drawing name 电源回路 Power loop
安全回路 safe circuit 控制回路一 Control circuit I 控制回路二 Control circuit II 控制回路三 Control circuit III 门机回路 Door operator loop GRACE-05变频门机回路 GRACE-05Door operator loop
RS232和RS485正确接线原理图

RS232和RS485接线的正确原理图RS-232是串行数据接口标准,最初都是由电子工业协会(EIA)制订并发布的,RS-232在1962年发布,命名为EIA-232-E,作为工业标准,以保证不同厂家产品之间的兼容。
RS-422由RS-232发展而来,它是为弥补RS-232之不足而提出的。
为改进RS-232通信距离短、速率低的缺点,RS-422定义了一种平衡通信接口,将传输速率提高到10Mb/s,传输距离延长到4000英尺(速率低于100kb/s时),并允许在一条平衡总线上连接最多10个接收器。
RS-422是一种单机发送、多机接收的单向、平衡传输规范,被命名为TIA/EIA-422-A标准。
为扩展应用范围,EIA又于1983年在RS-422基础上制定了RS-485标准,增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围,后命名为TIA/EIA-485-A标准。
由于EIA提出的建议标准都是以“RS”作为前缀,所以在通讯工业领域,仍然习惯将上述标准以RS作前缀称谓。
备注:以上是官方的专业描述,看不懂没有关系,大致有个印象就可以了,有兴趣的可以上网可以买一些专业书籍做深入研究,我再用通俗的语言补充描述一下。
RS232通讯的基础知识:RS232通讯又叫串口通讯方式。
是指计算机通过RS232国际标准协议用串口连接线和单台设备(控制器)进行通讯的方式。
通讯距离:9600波特率下建议在13米以内。
通讯速率(波特率Baud Rate):缺省常用的是9600 bps,常见的还有1200 2400 4800 19200 38400等。
波特率越大,传输速度越快,但稳定的传输距离越短,抗干扰能力越差。
备注:一般台式机会自带1-2个串口插座(公头(9针插头上带针的俗称公头,带针孔的俗称母头)),现在的笔记本一般不带串口插座,可以购买USB串口转换器,具体请参考怎样使用USB串口转换器?公头接线端子排序图母头接线端子排序图一般只用 2 3 5 号三根线。
电磁调速电动机工作原理及接线图
电磁调速电动机接线图之宇文皓月创作电磁调速电动机是由滑差离合器和一般异步电动机结合在一起组成的,在规定的范围内,它能实现均匀连续无极调速。
电磁调速控制器:7芯接线(1、2、3、4、5、6、7)电磁调速电动机:5端子(励磁线圈:F1、F2、测速发电机:U、V、W)电磁调速控制器1、2接220V电源相线和零线; 3、4(两根粗的)接励磁线圈F1、F2; 5、6、7接电磁调速电机的测速发电机U、V、W一般异步电动机:U、V、W通过接触器接电源 R 、S、T。
JDIA型电磁调速电动机控制器是原机械工业部全国联合(统一)设计产品,用于电磁调速电动机(滑差电机)的调速控制。
实现恒转矩无级调速。
一、型号含义:二、使用条件:1、海拔不超出1000m。
2、周围环境温度;-5℃-+40℃。
3、相对湿度不超出90% (20℃以下时)。
4、振动频率10-15OHz时,其最大振动加速度应不超出0.5g。
5、电网电压幅位动摇±10%额定值时、包管额定使用。
6、周围介质没有导电尘埃和能腐蚀金属和破坏绝缘的气体。
三、主要技术数据:3.1手操普通型(见下表)型号JDIA-11 JDIA-40 JDIA-90电源电压-220V ±10%频率50-60Hz员大输出定额直流90V 3.15A 直流90V 5A 直流90V 8A可控制电机功率0.55~11KW 15 ~ 40KW 45 ~ 90KW测速发电机单相或三相中频电压转速比为≥2V/100min≤3%额定转速时的转速变更率稳速精度≤1%四、基本工作原理:从图1方框图可知,控制器由可控硅主回路、给定电路、触发电路、测速负反馈电路等环节组成。
主回路:采取可控硅半波直流电路。
由于励磁线圈是一个电感性负载,为了让电流连续,因此在励磁线圈前并联一个续6R二级管(C2)。
主回路的呵护装置:用熔断器(RD)进行短路呵护,用压敏电阻1(Rv)进行交流侧浪涌电压保。
给定电路:4w交流电压由变压器副边经BZ01桥式整流,Rl、cl、C2兀型滤波后,以WD2WD1,稳压管加到给定电位器w1,两端。