基于三阶Adams格式的求解声波方程的多步算法
第三周 Adams操作讲解
创建体6
选择,并单击坐标点spring、rotate_center即可 重命名body6
2、添加约束
弹簧阻尼器
创建作用点(body6上与坐标点rotate_center重合的点)
选择,单击body6,并单击坐标点rotate_center即可 重命名spring2
半径(Radius),深度(Depth)
要求圆角半径变化时,需选择 End Radius 项,输入末端半径值, 此时圆角半径为起始半径
半径和深度的设置,不能使几何 体分成两块
凸圆 Boss
半Байду номын сангаас(Radius),高度(Height)
挖空 Hollow 外围添 加材料
壳体厚度 t(Thickness)
添加部分厚度 t(Thickness) 删除内部的形体
此功能可以将经过合并、相交和切割等处
Split
理形成的组合形体,还原为原先的基本形 体。
注:实体 1—操作过程中的第一个实体,实体 2—操作过程中的第二个实体。
几何模型细节
功能 倒角 Chamfer
图标
参数设置 斜面的宽度(Width)
说明
圆角 Fillet
开孔 Hole
圆角半径(Radius) 末端半径值(End Radius)
1、建模(2)
创建体3:选择,并单
击点point5、point5_2, 则体3创建,重命名 body3
1、建模(3)
创建体4
复制体2(在edit菜单下,copy命令),使复制体绕坐标点 rotate_center 的Z轴旋转-120度
利用ADAMS进行动态仿真分析的一般方法和过程111

基于ADAMS软件进行动态仿真分析的一般方法和过程摘要:本文通过对相关资料的总结归纳,介绍了虚拟样机的发展现况、ADAMS软件、特点以及利用其进行动态仿真的一般方法和过程。
并结合多功能开沟机液压系统进行了建模与仿真分析。
关键词:仿真 ADAMS 优化虚拟样机1、前言随着近代科学技术的发展,工程设计的理论、方法和手段都发生了很大的变化。
从计算机辅助工程(CAE)的广泛应用,到并行工程(CE)思想的提出与推行,从根本上改变了传统的设计方法,极大地促进了制造业的发展和革命。
但与此同时,人们已清楚地认识到:即使系统中的每个零部件都是经过优化的,也不能保证整个系统的性能是良好的,即系统级的优化绝不是系统中各部件优化的简单叠加。
于是,由CAX/DFX等技术发展而来,以系统建模、仿真技术为核心的虚拟样机技术(Virtual Prototyping)得到了迅速发展,并正成为各国纷纷研究的新的热点。
虚拟样机技术(Virtual Prototyping Technology)是当前设计制造领域的一项新技术,其应用涉及到汽车制造、工程机械、航空航天、造船、航海、机械电子、通用机械等众多领域。
它利用计算机软件建立机械系统的三维实体模型和运动学及动力学模型,分析和评估机械系统的性能,从而为机械产品的设计和制造提供依据。
虚拟样机技术可使产品设计人员在各种虚拟环境中真实地模拟产品整体的运动及受力情况,快速分析多种设计方案,进行物理样机而言难以进行或根本无法进行的试验,直到获得系统的最佳设计方案为止。
虚拟样机技术的应用贯穿着整个设计过程中,它可以用在概念设计和方案论证中,设计者可以把自己的经验与想象结合在虚拟样机里,让想象力和创造力得到充分地发挥。
用虚拟样机替代物理样机,不但可以缩短开发周期而且设计效率也得到了很大的提高。
本文以ADAMS为平台,简单说明一下进行虚拟样机的动态仿真分析的一般方法和过程。
2、ADAMS软件简介及特点ADAMS(Automatic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc,现已经并入美国MSC公司)开发的最优秀的机械系统动态仿真软件,是目前世界上最具权威性的,使用范围最广的机械系统动力学分析软件,在全球占有率最高。
工程案例—机器人Adams虚拟实验详细步骤
一.ADAMS软件简介虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。
ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。
1.1ADAMS软件概述ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。
如果在产品的概念设计阶段就采取ADAMS 进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。
ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。
目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。
adams_solver(ADAMS求解器培训资料)
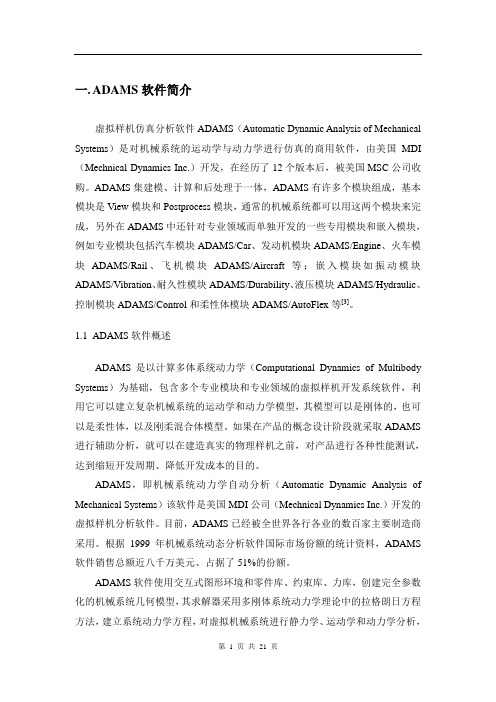
ADAMS/Solver中的四种文件类型ADAMS/Solver与ADAMS/View间的关系.bin/.cmd/.adm三种文件的异同点ADAMS/Solver 中的dataset file (.adm)练习: 读取.adm文件模型文件:shell_contact /shell contactGearGenerator2003_demo_shell.admmo shell.admADAMS/Solver command file练习: 读懂.acf文件模型文件:shell_contact /shell contact GearGenerator2003_de mo_shell.acfmo shell.acfSimulating a model in ADAMS/Solveradams05r2 ru‐sbelt_2d_pt_circle_hht.acf exhht acf练习: 读懂.acf文件运行模型模型文件:shell_contact /shell contactGearGenerator2003_demo_shell.acfmo shell.acf练习:批处理运行set MDI_ADAMS_CPU_COLUMN="Y"call adams05r2 ru‐s belt_2d_pt_circle_hht.acf excall adams05r2 ru‐s belt_2d_pt_circle_si2.acf exbelt2d pt circle si2acf模型文件:HHT / run_models.bat模型文件run models batADAMS/Solver Subroutines用户子程序流程总结P1. 编写程序代码user.c;P2. 在VC中编译user.c,生成user.obj;P3. 使用adams命令行,由user.obj生成user.dll;d命令行由bj dllP4. 将user.dll加入到adams库中;P5. 在Function Builder中即可使用自定义的函数。
第4章ADAMS软件算法基本理论-(陈立平)机械系统动力学分析及ADAMS应用

第4章ADAMS软件基本算法本章主要介绍ADAMS软件的基本算法,包括ADAMS建模中的一些基本概念、运动学分析算法、动力学分析算法、静力学分析及线性化分析算法以及ADAMS软件积分器介绍。
通过本章的学习可以对ADAMS软件的基本算法有较深入的了解,为今后合理选择积分器进行仿真分析提供理论基础,为更好地使用ADAMS打下良好的理论基础。
4.1 ADAMS建模基础ADAMS利用带拉格朗日乘子的第一类拉格朗日方程导出――最大数量坐标的微分-代数方程(DAE)。
它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体方位的三个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的动力学方程。
4.1.1 参考标架在计算系统中构件的速度和加速度时,需要指定参考标架,作为该构件速度和加速度的参考坐标系。
在机械系统的运动分析过程中,有两种类型的参考标架——地面参考标架和构件参考标架。
地面参考标架是一个惯性参考系,它固定在一个“绝对静止”的空间中。
通过地面参考标架建立机械系统的“绝对静止”参考体系,属于地面标架上的任何一点的速度和加速度均为零。
对于大多数问题,可以将地球近似为惯性参考标架,虽然地球是绕着太阳旋转而且地球还有自转。
对于每一个刚性体都有一个与之固定的参考标架,称为构件参考标架,刚性体上的各点相对于该构件参考标架是静止的。
4.1.2 坐标系的选择机械系统的坐标系广泛采用直角坐标系,常用的笛卡尔坐标系就是一个采用右手规则的直角坐标系。
运动学和动力学的所有矢量均可以用沿3个单位坐标矢量的分量来表示。
坐标系可以固定在一个参考标架上,也可以相对于参考框架而运动。
合理地设置坐标系可以简化机械系统的运动分析。
在机械系统运动分析过程中,经常使用3种坐标系:(1)地面坐标系(Ground Coordinate System)。
地面坐标系又称为静坐标系,是固定在地面标架上的坐标系。
ADAMS多体系统建模与动力学方程迭代求解

动力学子程序,计算出分割面上的作用力和作用力 矩,然后将这些作用力和作用力矩做为反作用施加 到主子系统上,计算主子系统在同一积分时刻的各 分割面上的位移、速度和加速度,如此反复迭代, 直到满足收敛条件。此辅子系统的动力学分析子程 序 是 做 为 ADAMS 主 模 型 中 用 于 计 算 作 用 力 的 子 程 序出现的,因此辅子系统的动力学模型就被嵌入到 ADAMS 主 模 型 中 , 体 现 了 系 统 的 整 体 求 解 。
& + ∑ c i& &i Fx = M 0& x τ
i=1 N
(3) (4)
用上述方法对图 1 所示的刚柔耦合系统进行迭 M= 374.448kg , M0 = 78kg , 代求解, 各参数值如下: L = 2.6m , 悬 臂 梁 断 面 为 圆 环 , 内 径 d = 0.0355m , 外 径 D = 0.0785m ,弹 性 模 量 E = 2.1× 10 11Pa ,密 度 ρ = 7800kg/ m3, 推 力 F = 370N 。 用 有 限 元 法 计 算 悬臂梁的固有模态时, 将 梁 划 分 为 20 个 等 长 三 维 梁 单 元 , 截 取 前 10 阶 正 则 模 态 计 算 。ADAMS 求 解 器 为 WSTIFF 积 分 器 , 最 大 积 分 步 长 为 0.0002s , 最 小 积 分 步 长 为 0.00019s 。 图 4 是 ADAMS 迭 代 计 算 出 的 刚 体 A 的 加 速 度 曲 线 ,图 5 是 用 自 编 程 序 计 算 出的刚体 A 的加速度曲线。由图可见,计算结果一 样 。 在 ADAMS 迭 代 中 , 求 解 器 预 估 校 正 ( 迭 代 ) 次 数 最 多 为 23 次 , 最 少 为 8 次 。
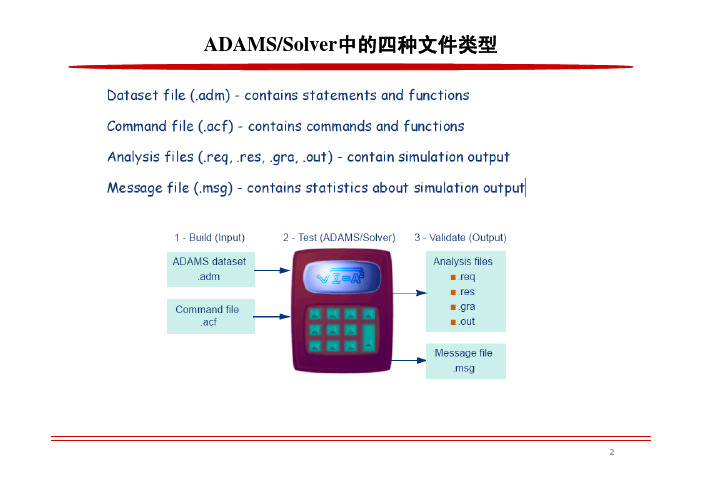
ADAMS动力学仿真算法及参数设置分析
3 ADAMS 动力学仿真的参数设置
通过对 ADAMS 动力学仿真算法的分析可以
— 28 —
・ φ ( q , u , t) = 0 φ( q , t) = 0 ・ ・ η =λζ 其中 : , =μ 解决指数 3 公式计算问题的方法是所谓的指数 下降法 ( Index reductio n met hods) : 将高指数的方程 化为低指数的形式 。ADAMS12. 0 提供了三种系统 公式 : I3 就是前面分析所用的公式 , 它是系统默认 的公式 。SI2 ( Stabilized2Index 2) 是所谓的指数 2 公 式 ,公式的形式如式 ( 12b ) 所示 。SI1 ( Stabilized2In2 dex1) 是所谓的指数 1 公式 , 公式的形式如式 ( 12c ) 所示 。 SI2 公式 ( 12b ) 不但可以避免 J aco bi 矩阵的病 态 ,而且状态方程中出现了约束方程的导数项 ,所以 在求解中可以对系统状态的速度误差进行控制 , 求 解更为精确 。SI1 公式也有类似的结论 , 但它计算 量太大 ,一般不采用 。 2. 刚性微分方程的求解 所谓刚性是指系统各分量之间变化速度相差很 大 ,例如各部件由于质量差别大而导致的运动变化 在速度上的差别 。求解这样的系统时如果积分步长 总是用与变化快的分量所对应的小步长求解的话 , 会导致计算量过于庞大而使问题不可解 。所以 , 当 变化快的分量衰减后希望能够使用较大的步长来求 解系统方程 。机械系统一般都具有刚性 。
然后 ,对 ADAMS 动力学仿真参数的设置进行了总结 ; 最后 ,指出了本文的意义和进一步研究的方向 。
[ Abstract] Firstly , give an int roductio n mechanical dynamics equatio ns ; Seco ndly , give an analysis o n AD2 AMS stiff integrator algorit hm2 GIS TIFF ; Thirdly , give a summary o n ADAMS dynamic simulatio n parame2 ter s selectio n. Finally , point o ut t he meaning of t his article and t he way to f urt her st udy.
利用ADAMS与MATLAB对平面三级倒立摆的仿真

利用ADAMS与MATLAB对平面三级倒立摆的仿真孔凡国;相飞;钟廷志【摘要】利用ADAMS建立了平面三级倒立摆的虚拟样机模型,并采用ADAMS与MATLAB联合控制的方式,首次完成了平面三级倒立摆的虚拟样机控制仿真.仿真结果表明,尽管X向和Y向系统采用了相同的控制器且初始参数设置完全一样,但仿真结果二者存在一定的区别,这证明了X向和Y向系统存在耦合现象.此外,利用ADAMS与MATLAB联合进行系统的控制仿真,能即时反映控制算法的效果,具有很大的推广价值.%Built in ADAMS planar triple inverted pendulum virtual prototyping model, and uses the ADAMS and MATLAB joint control simulation ways, first completed virtual prototype control simulation of planar triple inverted pendulum. The simulation results show that although X and Y direction system to use the same controller and initial parameters settings exactly the same, but the simulation results to X and Y direction system are different, which proves to X and Y direction system exists coupling phenomenon. In addition, ADAMS and MATLAB joint system control simulation, can reflect the effect of real-time control algorithm, with a great promotion value.【期刊名称】《工业仪表与自动化装置》【年(卷),期】2012(000)003【总页数】3页(P3-4,30)【关键词】三级倒立摆;ADMS软件;虚拟样机;仿真【作者】孔凡国;相飞;钟廷志【作者单位】五邑大学,广东江门529020;五邑大学,广东江门529020;五邑大学,广东江门529020【正文语种】中文【中图分类】TP2730 引言倒立摆系统作为一个高阶次、不稳定、多变量、非线性、强耦合的复杂被控系统[1-2],在对其控制过程中能有效地反映控制中的许多关键问题,如镇定问题、非线性问题、鲁棒性问题、随动问题以及跟踪问题等,是进行控制理论验证的理想实验平台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
创新项目论文一种基于三阶Adams 格式的求解声波方程的多步算法China University of Mining & Technology-Beijing摘要一个准确、高效、低数值频散的正演算法能够提高反演精度、加快反演收敛速度,因此研究地震波场正演模拟技术具有重要意义。
区别于传统的空间离散方法,利用空间插值, 用网格点处的函数值及其梯度共同逼近空间高阶偏导数的方法称为近似解析离散化方法。
声波方程通过变换,并采用近似解析离散化方法进行空间离散,从而转变成为一个半离散化的常微分方程组,再利用三阶显式Adams格式进行时间推进,求解半离散化的常微分方程组,从而得到了一个新的求解声波方程的有限差分方法(AD-STEM)。
对AD-STEM进行了理论误差和数值误差分析、计算效率比较和数值波场模拟。
研究表明,与传统方法AD-LWC比较,AD-STEM方法数值精度更高,数值频散更低,更高效,且与解析解匹配更好。
AD-STEM方法能够通过压制数值频散而提高计算效率。
在无可见数值频散的条件下,AD-STEM的计算速度是AD-LWC的1.88倍,而存储量只有其72%,更适合在粗网格下进行大规模地震波场数值模拟。
关键词:近似解析离散化方法;三阶Adams格式;数值频散;有限差分目录1 绪论 (1)1.1选题背景和研究意义1.2粘弹性介质国内外研究现状1.3有限差分国内外研究现状1.4本文主要研究内容2 粘弹性介质的基本模型 (6)3方法介绍....................................................................................................................... 错误!未定义书签。
3.1 Stereo-modeling方法简介 (10)3.2 Lax-Wendroff correction方法简介 ...................................................................... 错误!未定义书签。
4 粘弹性介质中的波场数值模拟..................................................................................... 错误!未定义书签。
4.1 波场快照 (11)4.2 波形图.................................................................................................................. 错误!未定义书签。
4.3 SEG模型的地表地震记录 (14)5 结论 (18)6 参考文献 (20)1 绪论1.1 选题背景和研究意义随着我国石油和天然气工业的迅速发展,油气勘探的精度和难度也在不断地加大。
这就要求我们必须深入了解地震波在地下介质中的传播规律,以便我们能更加准确地进行地下油气的勘探。
地震波数值模拟技术是目前地震勘探领域人们研究地震传播规律的一个重要手段。
传统地震波数值模拟技术,一般假设地层介质是均匀和完全弹性的,但是我们发现:在这种假设情况下,数值模拟的结果和我们在野外观察到的实际记录有很大差别。
造成这种差别的主要原因是因为实际的地层介质并不是均匀和完全弹性的,我们应该用粘弹性介质来代替,这对于我们研究地震波波场的传播规律具有了非常重要的理论和实际意义。
1.2 粘弹性介质国内外研究现状为了对实际地震资料的解释以及地震波的偏移反演等处理提供可靠依据,我们需要建立不同的介质模型来模拟地下介质,发展相应的理论和勘探方法。
从以往的模拟结果来看,以经典弹性波理论为基础得到的理论记录实际地震波在大地中传播时所接收到的记录之间存在很大差别,为了消除这种差别,我们通常要对球面扩散、界面的透射损失等进行补偿,但是在补偿过后,理论记录上来自深层的地震波振幅仍然较小、低频成分较丰富,这说明地下介质对地震波有吸收衰减的作用,特别是对高频成分,吸收更为严重。
地震波衰减受多种因素影响,事实上现在没有一种机理可以描述所有环境条件下产生的损耗,介质的粘滞性就是其中的一个主要原因,为了弄清楚地震波在地层中的衰减机制,很多研究人员开始对粘弹性介质的理论和应用方法进行研究。
(一)国外研究现状早在1845年Stokes就开始研究粘弹性介质中的地震波,他提出要考虑具有耗损的固体就必须使这种固体具有类似于粘滞液体的性质,因此他给固体的剪切模量附加上一个剪切粘滞,并建立了由于粘滞型内摩擦引起的能量耗损的Stokes 粘弹性波动方程。
但是粘弹介质理论的发展却是非常缓慢的,直到上个世纪40年代,美国地球物理学家N.K.Ricker首次在粘弹介质理论中完整详细的描述了地震波在地下介质传播中时的衰减问题。
其后,人们纷纷开始研究粘弹介质中地震波的传播理论,提出了一系列的理论和研究方法。
Aki和Richards(1980)建立了一种新的粘弹性介质模型——标准线性固体模型,相对于开尔芬—佛格特模型和麦克斯韦尔模型,标准线性固体模型更加适合描述地震波衰减的物理机制。
粘弹介质地震波数值模拟技术的研究是从上世纪八十年代开始的,Day和Minster (1984)第一次成功的在粘弹性介质中利用Pade近似法进行2-D时间域数值模拟。
EmmeriCh和Korn (1987)发现这种方法存在明显的缺陷即质量低劣和计算效率低,于是他们提出了一种新的近似称之为“广义标准线性固体”(GSLS),同时对粘弹性模量的有理式进行推导,并发展二维有限差分算法使之适合标量波的传播,提高了计算效率。
CarCione(1988)等对粘滞声波在地层中传播的进行了模拟并推导出了模拟方程。
Robertsson(1994)等设计了一种速度一应力有限交错网法,并利用它研究了二维粘弹性介质下纵波和横波的传播规律,随后他们又将该算法推广到三维介质情况。
(二)国内研究现状跟国外关于粘弹性介质理论及其数值模拟的迅速发展,国内对这方面研究起步较晚。
近年来国内地球物理学家也开始对地震波在粘弹性介质中传播进行研究。
张剑锋、李幼铭(1994)把地层介质假设为水平层状介质,利用混合变量粘弹性波方程,直接逐层求解位移、应力的方法进行数值模拟四。
毕玉英、杨宝俊(1995)给出一种实现二维粘滞介质完全波场模型计算的方法。
该方法的独到之处在于将传播时间分解成了传播水平时间和传播垂直时间两部分,平面源人射改为线源人射,无需繁杂的射线追踪,只考虑入射角随偏移距的变化情况便可获得包括反射纵波、转换波、多次波、折射波及面波等在内的多种波场的时间一空间道集的正演模拟记录,而且还能灵活地模拟井间和VSP地震剖面。
宋守根(1996)提出了一种提高地震剖面纵横向分辨率的粘弹性介质波场外推方法,利用该方法进行反演时,无需对积分方程作线性化近似,适应性较强,并通过实例对该理论推断予以验正。
张建贵(1999)等针对塔里木盆地的沙漠覆盖面大,地层埋藏深,地质构造幅度小的特点以大地介质为粘弹性介质为前提,利用粘弹性介质波动方程聚焦成像技术得到了一套高分辨率、高信噪比和高保真的地震处理剖面。
孟凡顺(2000)等人根据粘滞弹性理论,推导出了粘滞弹性波的有限差分运动方程并对任意复杂地质体粘滞弹性波进行了正演模拟;程昌钧(2001)等系统研究了粘弹性介质中波的逆散射问题及其求解过程;崔建军和何继善 (2001)以二维粘弹性波动方程为基础,研究了粘弹性波动方程F-K域的正演模拟和偏移方法的思路和理论基础,并阐明了推导过程;杨午阳(2003)提出了一种利用粘弹性声波波动方程进行偏移的新方法;奚先和姚姚(2004)通过波动方程的交错网格有限差分数值模拟方法,对地震波在二维粘弹性随机介质中的传播进行了模拟并研究了其波场特征;朱慧卿(2004)利用新定义的各向异性网格一广义拟一致网格对粘弹性方程各向异性有限元方法的超收敛性进行了分析[22];刘财、张智(2005)以积分本构方程为基础,应用对应原理建立波动方程,对线性粘弹体中地震波场进行伪谱法模拟;宋常瑜(2006)等采用二维粘弹性波方程交错网格高阶有限差分数值模拟方法进行了井间地震粘弹性波场数值模拟,并对地震波的传播规律和衰减特征进行了研究;邵志刚(2007)将以往两种粘弹介质中地震波模拟方法的优点结合起来,以模型理论和积分本构方程为基础,从理论上分析了模型对地震波场的影响并采用交错网格有限差分法对粘弹介质中的地震波进行数值模拟;孙成禹(2007)针对以往粘弹性模型在描述介质品质因子对频率的依赖关系方面存在不足,与实际观测结果不符的问题,提出了一种新的粘弹介质模型的数值方法,该方法较好地描述了品质因子对频率的非依赖性,可以从理论上较准确地对实际介质的粘弹性对地震波场的影响进行研究;唐启军(2009)将Von Karman型的随机各向同性背景引入粘弹性单斜各向异性波动方程,并应用交错网格技术进行模拟;Yong Yun-dong (2010)等人推导出了交错网格有限差分的并行算法,并将其用于三维粘弹性随机溶洞介质数值模拟中,取得了良好的效果。
1.3有限差分国内外研究现状地震数值模拟作为地震勘探基础性研究,是我们认识地震波传播规律,检验各种处理方法正确性的重要工具,地震波的数值模拟是是研究地震波传播规律的最有效工具和手段,在地震勘探和地震学各工作阶段都有重要的作用,贯穿于地震资料的采集、处理、解释的整个过程中,同时也是地震反演的基础。
有限差分法是最常用的一种数值模拟方法,基本原理就是在解偏微分方程时用有限差分算子代替微分,将微分方程化为相关的线性代数方程,通过求解代数方程,得到偏微分方程的数值解。
有限差分法数值模拟技术相对于射线方法具有更高的精度,同时比有限元方法计算量小,因此在实际应用中占很重要的地位。
(一)国外研究现状有限差分法数值模拟技术的发展只有几十年的历史,早期对于地震波传播有限差分方法的研究都是基于二阶位移方程。
有限差分数值模拟方法最早由Alterman和Karal(1968)提出,他们首次将有限差分数值模拟方法应用于层状介质的模拟,并分析弹性波在层状均匀介质中的传播规律。
他们为利用差分方法解决各种勘探地震学的实际问题奠定了基础,随后差分方法被广泛应用于地震勘探中并在应用中不断得到发展。
Boore(1972)进行了非均匀介质地震波有限差分数值模拟并研究了地震波非均匀介质中的传播规律。
Alford (1974)对有限差分模拟的影响因素(网格大小和地震波传播方向)进行分析,网格间距控制地震波数值模拟的计算精度,相同精度下高阶差分与低阶差分对网格间距的要求不同型;Kelly(1976)利用有限差分法进行地震记录的合成,还对合成的地震记录进行一些常规的数据处理分析,进一步拓宽了数值模拟在实际地震处理中的应用;前面都是基于笛卡尔坐标系下常规网格的离散差分,Madariaga(1976)首次提出交错网格方法,并将此方法应用于弹性介质地震波的模拟,其模拟的差分精度为O(Δt2+Δx2)。